
Abstract
In this work, we formulate the mathematical model that incorporates two equations to represent the ultimate goal and controlling strategy to the traditional prey-predator model so that we can investigate the interaction between preys and predators. The model is shortly called the CSOH model. The impulsive practice is added into the model for squirrel control purposes. In particular, we are interested in pulsing the squirrel hunters into the system for every fixed period to control squirrels at the level allowing farmers to have sufficient amount of coconuts so that they can continue their business. We establish the conditions for the squirrel-free periodic solution exists and is globally stable. The numerical simulations reveal that squirrels in the coconut farm could be entirely eradicated by the pulsing strategy. However, the disappearance of squirrels on the farm is not an ecological desire because all species should be allowed to coexist in the system. Consequently, we recommend that the number of squirrel hunters pulsed into the coconut farm should be properly set by considering the time of intervention, expenditure, ecological reasons, and emotional sensitivity of village members.
Similar content being viewed by others


1 Introduction
Plant producers have recognized the issue of plant protection from pests for a long time. The various practices to prevent pests have been thus modified according to the situations in which the plant producers have encountered. We may classify those practices into two main categories, i.e., the human-made and the natural practices. The former refers to any intervention invented by humans, e.g., chemicals, cages, and guns, while the latter refers to mechanisms that occur naturally to strengthen the ecological balance. In the mathematical approach, there are attempts to discover the combination of these methods. Because, by means of the natural mechanisms, although they are useful in maintaining the ecological balance, they may not be effective because the natural control usually takes a longer time than human interventions. In contrast, human interventions may be more punctual, but they may negatively distort the natural system in the long term. Inspired by the well-known ecologically mathematical model proposed in 1931 by Lotka–Volterra [1], the application of pest management that combines these two practices has been successively developed. This collective practice is known as Integrated Pest Management (IPM). The progress of IPM in the creation of mathematical models has been reflected by the invention of the parameters, variables, functional forms, and the ability to reflect the nature of the studied ecosystem. Previously proposed models included, e.g., the IPM model with the fixed moment that employs the pest pesticide resistance rate [2] and the IPM model with the threshold condition that takes into account the effect of carrying capacity, environment fluctuation, human activities [3], the pest growth rate, types of the functional response, and the pesticide effect on natural predators [4].
In 2010, Tang et al. [5] formulated the IPM model with a different pulsing time of the chemical and natural enemy and showed the periodic solution under a specific threshold. This IPM model has been further developed to scrutinize the existence and stability of the periodic solution by Xiao Dai in 2015 [6] by inserting the logistic growth function into the model. They conducted the sensitivity analysis of the periodic solution by varying the number of natural predators and discovered that the pest becomes extinct if the released predators are large enough. Likewise, in 2017, Sun et al. [7] relaunched their IPM model. Their updated version was not much different from the previous one; in particular, they showed the periodic solutions by varying the values of parameters [2].
Recently, to show the novels of impulsive application in various fields, Zhao et al. [8] formulated an impulsive delayed phytoplankton-zooplankton model:
where \(P_{1}(t)\) denotes the concentration of the nontoxic phytoplankton (NPP) and \(P_{2}(t)\) is the concentration of the toxin-producing phytoplankton (TPP). \(Z(t)\) is the concentration of the zooplankton. The meaning of all parameters in the model can be found in [8]. The numerical solutions conducted by this work established the global attractivity of zooplankton-extinction periodic solutions.
Also, Zhang et al.[9] proposed an impulsive SIRS computer virus propagation model:
where \(S(t)\), \(I(t)\), and \(R(t)\) denote the percentages of susceptible, infected, and recovered internal computers at time t, respectively. In their work, the numerical results demonstrated that the virus-free equilibrium is globally stable. In addition, several applications of the impulsive models have been studied in, e.g., [10,11,12,13].
In Thailand, the problem of squirrels has been recognized by the coconut farmers in the Samut Songkhram, a province of Thailand, for long time. The squirrels become the major animal that destroys a number of not only coconuts but also other plants produced in the same areas. Until now, farmers still do not have an effective way to prevent the coconut loss from squirrel invasion. Even though some strategies have been employed to control the squirrels, e.g., poisoning, catching, and hunting, they seem ineffective because of the limitation of the farmer capability and the support from the related agents, especially from the government. Therefore the problem of squirrels has still been embedded in this area. However, the intention to alleviate the squirrel problem was reflected by a campaign that Samut Songkhram Provincial Agriculture Office (PAO) organized in 2013 to burn the 60,000 tails of squirrels which the agricultural office purchased from farmers at a price of 15 baht per tail. This campaign covered ten months and invited the farmers from three sub-districts to sell the squirrel tails to PAO at maximum 2000 tails per month per sub-district. Eventually, this campaign cost the government budget of approximately 700,000 baht. Additional information could be found at http://pr.prd.go.th/samutsongkhram. Due to the limitation of the government budget, the law against the air gun carrying in public area, and resistance from some people who have protected squirrels, this campaign was finally terminated. However, in the coconut farmers’ perspective, squirrel hunting is an essential practice for controlling the squirrel density.
Motivated by various applications of the impulsive technique and the problem faced by coconut farmers, we hence propose an impulsive CSOH model describing the actual situation of the squirrel problem in the coconut farms. We aim to apply the mathematical technique to this real problem and then to make a contribution by proposing new perspectives on the mathematical model. In other words, we add two new equations into the classical prey-predator relationship. The first one represents the coconut yield indicating the ultimate result and the other one is the squirrel hunter presenting a group of people who have been used in the squirrel control strategy. In addition, this hunter equation shows a new kind of predators who can improve their predation skills which are not generally presented in the traditional prey-predator model. This paper is organized as follows. A CSOH model with impulsive practice is presented in Sect. 2. Some essential lemmas which are required in our work are given in Sect. 3. In Sect. 4, the implication of lemmas and theories is presented. The sufficient conditions for the local and global attraction of solution are derived in Sect. 5. Finally, numerical simulations and short discussions are provided in Sect. 6 and Sect. 7, respectively.
2 Mathematical model
Since eliminating the squirrels is not an ultimate objective of the model that we propose, we improve the traditional prey-predator model, which mainly focuses on the interaction and control between the preys and predators, by incorporating a coconut yield equation into the model to investigate the effect of the squirrel controlling strategies on the number of coconuts as follows:
with the initial condition \(( C ( 0 ^{ + } ) , S ( 0 ^{ + } ) , O ( 0 ^{ + } ) , H ( 0 ^{ + } ) ) = ( C _{ 0 } , S _{ 0 } , O _{ 0 } , H _{ 0 } ) = X _{ 0 }\), where \(C(t)\), \(S(t)\), \(O(t)\), and \(H(t)\) are the number of coconut yields, squirrels, barn owls, and squirrel hunters at time t, respectively. In addition, \(C(t^{+})\), \(S(t^{+})\), \(O(t^{+})\), and \(H(t^{+})\) represent the number of coconut yields, squirrels, barn owls, and squirrel hunters immediately after the nth pulse. The basic assumptions of the model are that coconut yields, squirrels, and bran owls grow logistically. For coconut yields, K is the coconut carrying capacity which is held constant and limited by the growing area and nutrient of soil. Since squirrels and barn owls do not only rely on one source of food, their carrying capacities are defined differently from the carrying capacity of the coconuts, i.e., the squirrel carrying capacity is defined by the combination between coconuts and other sources of food Q. Similarly, the carrying capacity of barn owls is defined by the combination between the number of squirrels and other sources of food B. For the rest of the parameters, the constants β, η, and ξ denote the reproduction rate of coconut yields, squirrels, and barn owls, respectively. γ is the predation rate of squirrels, μ is the harvesting rate of coconut yields, ω is the marginal carrying capacity of squirrels induced by the number of coconuts, λ is the conversion rate of squirrels, δ is the predation rate of barn owls, σ is the hunting rate of squirrel hunters, κ is the marginal carrying capacity of barn owls induced by the number of squirrels, and ζ is the conversion rate of barn owls.
Regarding the squirrel hunter equation, this equation presents the squirrel controlling strategy employed in the coconut farm and a kind of the predator that deviates from the predators introduced in the traditional prey-predator model, i.e., the hunters in our model can improve their predation skills. The equation shows the straightforward relationship between the number of hunters and squirrels with the assumption that when the squirrel emerges, the squirrel hunter emerges too. This phenomenon has happened since the farmers needed to find some way to eliminate squirrels to prevent their coconut loss and one easy way is becoming the hunters. Also, hiring the hunters is an option that the farmers can pursue to increase the number of hunters for eliminating the squirrels when they increase in their density. Nevertheless, the number of hunters can be declined by the deterioration of the squirrel hunting skills when squirrels are scarce for hunting. Also, a loss of interest in squirrel hunting can cause hunter reduction. Two parameters in the equation, which are related to these events, are the entered rate of hunters c presenting the marginal effect of the squirrel density on the number of hunters and the exit rate of hunters d showing the marginal effect of hunter density on the number of hunters.
Since we are interested in observing the effects of the squirrel hunters pulsing on the squirrel density, we impose a fixed number of hunters h at each fixed moment of pulsing time nT, where \(n=1,2,\ldots \) , and T is the period of impulsive effect, into the model.
3 Preliminaries
Before providing the main results, we introduce some notations and few auxiliary results related to the comparison theorem, which will be useful for establishing our results.
Let \(R_{+}= [ 0,+\infty )\), \(R_{+}^{4}= \{ X= (C(t),S(t),O(t),H(t) )\in R^{4}:C(t)\ge 0, S(t)\ge 0, O(t) \ge 0, H(t)\ge 0 \}\). The functions on the right-hand sides of the former four equations in system (1) are denoted by \(f={{ ( f_{1},f_{2},f_{3},f_{4} )} ^{T}}\). Let \(V_{0}\) be the set of functions \(V:R_{+}\times R_{+}^{4}\to R_{+}\) having the following properties [11, 14,15,16,17]:
-
(1)
V is continuous in \(( nT, ( n+1 )T ] \times R_{+}^{4}\) for each \(X\in R_{+}^{4}\), \(n\in Z_{+}\) and \(\lim_{ ( t , y ) \rightarrow ( n T ^{ + } , X ) } V ( t , y ) = V ( n T ^{ + } , X ) \) exists,
-
(2)
V is locally Lipschitzian in X.
Definition 1
([18])
Suppose that \(V\in V_{0}\), then, for \(( t,X )\in ( nT, ( n+1 )T ]\times R_{+}^{4}\), the upper right derivative of \(V ( t,X )\) with respect to the impulsive differential system (1) is defined as
The solution of system (1), denoted by \(X: R _{ + } \rightarrow R _{ + } ^{ 4 }\), is a piecewise continuous function on \(( nT, ( n+1 )T ]\), \(n\in Z_{+}\), and \(X(nT^{+})= \lim_{t \rightarrow n T ^{+}} X(t)\) exists. Obviously, the smoothness properties of f guarantee the global existence and uniqueness of solutions of system (1).
Lemma 1
Let \(V\in V_{0}\) and assume that
where \(g:R_{+}\times R_{+}\rightarrow R\) is continuous in \(( nT, ( n+1 )T ]\times R_{+}\), and for \(u\in R_{+}\), \(n\in Z_{+}\) and \(\lim_{ ( t , v ) \rightarrow ( n T ^{ + } , u ) } g ( t , v ) = g ( n T ^{ + } , u )\) exists and \(\psi _{n}:R_{+} \to R_{+}\) is non-decreasing. Let \(r ( t )\) be the maximal solution of the scalar impulsive differential equation
existing on \([ 0,\infty )\). Then \(V ( 0^{+},X_{0} ) \le u_{0}\) implies that \(V ( t,X(t) )\le r ( t )\) for all \(t \ge 0\), where \(X(t)\) is any solution of system (1).
Similarly, when all the directions of the inequalities in Lemma 1 are reversed and \(\psi _{n}\) is non-increasing, \(r ( t )\) will become the minimal solution of the scalar impulsive differential equation. Note that if we have some smoothness conditions of g to guarantee the existence and uniqueness of solutions for (4), then \(u ( t )\) is exactly the unique solution of (4).
Let us consider the basic properties of the following example of impulsive differential equation.
We have the following lemma.
Lemma 2
System (5) has a unique positive periodic solution \(\tilde{ u } ( t )\) with period T, and for every solution \(u ( t )\) of (5), it follows that \(|u(t)-\tilde{ u } ( t )| \to 0\) as \(t\to \infty \), where
with \(t \in ( n T , ( n + 1 ) T ]\), \(n \in Z _{ + } \).
Lemma 3
([18])
Let the function \(m \in PC^{\prime } [ R^{+},R ]\) be left-continuous at \(t_{k}\), \(k\in Z_{+} \) satisfying the inequalities
where \(p,q\in C [ R^{+},R ]\) and \(d_{k}\ge 0\), \(b_{k}\) are constants, then the solution of (6) is bounded by the following inequality
Similar results can be obtained when all the directions of the inequalities in (6) are reversed.
4 The existence and boundedness of squirrel-free periodic solutions
In this section, we apply the lemmas presented in the previous section to our main results. To investigate the squirrel-free periodic solution, system (1) becomes
with the initial condition \(( C ( 0 ^{+}) , O ( 0 ^{+}) , H ( 0 ^{+})) = ( C _{0}, O _{0}, H _{0})\).
Based on the first and second equations of (8), which are independent of the rest of the equations, we get the positive equilibrium points, namely \(C^{*}={ (\beta -\mu )K}/{\beta }\) and \(O^{*}=B\).
Now consider the subsystem
Using Lemma 2, we have that the solution for \(t \in ( n T , ( n + 1 ) T ] \), \(n \in Z_{+}\) of (9) is \(H ( t ) = ( H _{ 0 } - \frac { h }{ 1 - e ^{ - d T } } ) e ^{ - d t } + \tilde { H } ( t )\) and the positive periodic solution of (9) is \(\tilde{H}(t)={he^{-d(t-nT)}}/{(1-e^{-dT})}\) with the initial value \(\tilde{H}(0^{+})={h}/{(1-e^{-dT})}\). Therefore \(\vert H(t)-\tilde{H}(t) \vert \to 0\) as \(t\to \infty \), i.e., \(H(t)\to \tilde{H}(t)\) as \(t\to \infty \). This implies that \(\tilde{H}(t)\) is globally asymptotically stable.
Assume that \(X(t)\) is a solution of (1). If \(X( 0 ^{+}) \geq 0\), then we have \(X ( t ) \geq 0\) for \(t \geq 0\) while if \(X ( 0 ^{+}) > 0\), then \(X ( t ) > 0\), \(t \geq 0\) [25]. Next, we want to show that all solutions of (1) are uniformly ultimately bounded. From the first equation of (1), it provides
which gives
and
Also, applying this process to the second equation of (1), we have
Similarly, from the rest of the equations of (1), we obtain
and
Define \(V(t)= C(t) + S(t) + O(t) + H(t)\). When \(t\ne nT\), we obtain
When \(t=nT\), we have \(V(nT^{+})=V(nT)+h\). By applying Lemma 3, when \(t\in ( nT, ( n+1 )T ]\), we obtain
When \(t \rightarrow \infty \), we have
So \(V (t)\) is uniformly ultimately bounded. Hence, by the definition of \(V (t)\), we have that there exists a constant \(M_{5} > 0\) such that \(C(t)\), \(S(t)\), \(O(t)\), \(H(t) \le M_{5}\) for all t large enough.
5 Stability analysis
In this section we will prove the existence and stability of the only survived squirrel hunter equilibrium \(( 0,0,0,\tilde{H} ( t ) )\) and the squirrel-free equilibrium \(( C^{*},0,O ^{*},\tilde{H} ( t ) )\) under certain conditions.
Theorem 1
Let \(( C ( t ),S ( t ),O ( t ),H ( t ) )\) be any solution of system (1). Then we have the following results.
-
(1)
The only survived squirrel hunter equilibrium \(( 0,0,0, \tilde{H} ( t ) )\) is unstable.
-
(2)
The squirrel-free periodic solution \(( C^{*},0,O^{*}, \tilde{H} ( t ) )\) is locally asymptotically stable provided that inequalities
$$\beta < 2 \frac{ \beta C ^{ * } }{ K } + \mu \quad \textit{and}\quad \bigl(C^{*} \lambda -O^{*}\delta +\eta \bigr)T \biggl(\frac{d}{\sigma } \biggr)< h \quad \textit{hold} . $$
Proof
For the local stability of a T-period solution of \(( 0,0,0, \tilde{H} (t ) )\), we consider a small amplitude perturbation of the solution [26] defined by \(\hat{c}(t)=C(t)\), \(\hat{s}(t)=S(t)\), \(\hat{o}(t)=O(t)\), and \(\hat{h}(t)=H(t)-\tilde{h}(t)\), then system (1) can be reduced to the following linearized form:
Let \(\varPhi (t)\) be the fundamental matrix of (10), it must satisfy
Linearizing the impulsive conditions of (10), we obtain
Thus the monodromy matrix of (10) is
which implies that
Obviously \(\vert \lambda _{3} \vert >1\), thus \(( 0,0,0, \tilde{H} (t ) )\) is unstable [26].
In order to discuss the stability of \(( C^{*},0,O^{*},\tilde{H} ( t ) )\), let \(C(t)=C^{*}+\hat{c}(t)\), \(S(t)= \hat{s}(t)\), \(O(t)=O^{*}+\hat{o}(t)\), \(H(t)=\tilde{H}(t)+\hat{h}(t)\). Then system (1) can be expressed in the linearized form as follows:
Let \(\varPhi (t)\) be the fundamental matrix of (11), it must satisfy
Thus the monodromy matrix of (11) is
which implies that
Thus the squirrel eradication periodic solution is locally asymptotically stable if \(\vert \lambda _{1} \vert <1\) and \(\vert \lambda _{2} \vert < 1\), i.e., if \(\beta < 2 \frac{ \beta C ^{ * } }{ K } + \mu \) and \((C^{*} \lambda - O^{*} \delta + \eta ) T (\frac{d}{ \sigma } )< h\). □
In the following, we will discuss the condition for global stability of \(( C^{*},0,O^{*},\tilde{H} ( t ) )\).
Theorem 2
Let \(( C ( t ),S ( t ),O ( t ),H ( t ) )\) be any solution of system (1). Then the squirrel eradication periodic solution \(( C^{*},0,O^{*}, \tilde{H} ( t ) )\) is globally attractive provided that the inequality
Proof
Let \(( C ( t ),S ( t ),O ( t ),H ( t ) )\) be any solution of system (1). From the first equation of (1), we have
which implies that \(\lim_{t\to \infty } \sup C(t)={K(\beta -\mu )}/{\beta }:=C^{*}\). Thus, there exists an integer \(n_{1}>0\) such that, for \(t>n_{1}\), we have \(C(t)< C^{*}+ \varepsilon _{0}\), \(\varepsilon _{0}>0\). Similarly, we can obtain \(\lim_{t\to \infty } O(t)=B:=O^{*}\) and \(O(t)< O^{*}+\varepsilon _{0}\). Next consider the subsystem
Applying Lemma 1 and Lemma 2 to (13), we obtain
which is globally asymptotically stable. Then \(\exists n_{2}>n_{1}\), \(t>n _{2}\) such that \(H(t)>\tilde{H}(t)-\varepsilon _{0}\), \(nT< t\le (n+1)T\), \(n>n _{2}\).
Now consider the second equation of system (1) which can be written as
Integrating this equation between the pulses and after the successive pulse, we can obtain
where \(q={{e}^{\int _{nT}^{(n+1)T}{ ( \eta +\lambda C^{*}-\delta O^{*}-\sigma ( \tilde{H}(t)-\varepsilon _{0} ) )}\,dt}}\). When \(\varepsilon _{0}\to 0\), we have \(q<1\) if the following condition
holds. Consequently, we have \(S(nT^{+})\le S(0^{+})q^{n}\) and we therefore obtain \(S(t)\to 0\) as \(n\to \infty \). Now let \(\varepsilon _{1}>0\) such that \(0< S(t)< \varepsilon _{1}\), and consider the following subsystem:
Also applying Lemma 1 and Lemma 2 to (14), we have that when \(\varepsilon _{1}\to 0\) then \(\tilde{ H } ( t ) = ( \frac{ h }{ 1 - e ^{ - d T } } ) e^{ - d ( t - n T ) }\), \(nT< t<(n+1)T\), \(n\in Z_{+}\), which is globally asymptotically stable. This completes the proof. □
The analysis indicates that it is possible to eliminate squirrels from the coconut farms by pursuing the squirrel hunting strategy. Moreover, an achievement of this strategy is unconditioned on the initial number of squirrels. This implies that the farmers can get rid of the squirrels from their farm if they desire. However, the decision of how many squirrels are to be eliminated may depend on many criteria, and hence zero squirrels might not be a desirable target. In the next section, we conduct a numerical analysis to test our theories derived in this section and discuss the conditions for which we should consider to control the number of the squirrels.
6 Numerical experiments
In this section, we provide the experimental results produced from testing the assumptions related to the strategies of controlling the squirrels. The assumptions are set by varying the number of pulsed squirrel hunters h, but fixing the duration of the pulsing time T to be six months. There are two reasons behind these assumptions, i.e., (1) it is useful for local governments to set budgets and projects to hire squirrel hunters and (2) a duration longer than six months can cause the extent to which the squirrels destroy the coconuts unnecessarily. To investigate the effect of pulsing strategies, we estimate the parameters from the information collected from both primary sources of discussion with coconut farmers and secondary sources of documents detailing the coconut growing practice and behavior of squirrels and barn owls. The obtained parameters are as follows: \(\beta =3\), \(\gamma =0.1\), \(\mu =0.3\), \(\eta =1\), \(\omega =0.2\), \(\lambda =0.005\), \(\delta =0.2\), \(\sigma =0.1\), \(\xi =1\), \(\kappa =0.05\), \(\zeta =0.002\), \(c=0.01\), \(d=0.06\), \(K=3500\), \(Q=100\), and \(B=10\).
By setting \(T=6\), we obtain the threshold number of the pulsed squirrel hunters h approximately from (12) which is equal to 52. We detecte the effects of the pulse by separating the actions into three strategies, namely the strategy of 100, 54, and 25 pulses.
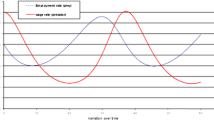
Figure 1(a)–1(f) shows that the squirrels are all eradicated after the first pulse using the first strategy with \(h=100\). However, this strategy may require a large amount of money to hire the hunters and it tends to affect the emotions of the villagers who love squirrels adversely. Also, the situation of eliminating all squirrels from the coconut farm does not fit the biological sense that the species should coexist. Therefore, we proceed through by reducing squirrel hunters and the results are shown in Fig. 2(a)–2(f) for \(h=54\) and Fig. 3(a)–3(f) for \(h=25\). By hunter reduction, the cost of government can be reduced. However, the pulsing strategy of 54 hunters still do not allow squirrels to remain on the farm. When we use the pulsing strategy of 25 hunters, we find that coconuts, squirrels, barn owls, and squirrels hunters live together on the farm.

Strategy 1: \(C(0) = 500\), \(S(0) = 20\), \(O(0) = 2\), \(H(0) = 2\), \(h = 100\), \(T = 6\) (a) the dynamic of \(C(t)\), (b) the dynamic of \(S(t)\), (c) the dynamic of \(O(t)\), (d) the dynamic of \(H(t)\), (e) the dynamic of \(C(t)\) and \(S(t)\), (f) the dynamic of \(S(t)\) and \(H(t)\)

Strategy 2: \(C(0) = 500\), \(S(0) = 20\), \(O(0) = 2\), \(H(0) = 2\), \(h = 54\), \(T = 6\) (a) the dynamic of \(C(t)\), (b) the dynamic of \(S(t)\), (c) the dynamic of \(O(t)\), (d) the dynamic of \(H(t)\), (e) the dynamic of \(C(t)\) and \(S(t)\), (f) the dynamic of \(S(t)\) and \(H(t)\)

Strategy 3: \(C(0) = 500\), \(S(0) = 20\), \(O(0) = 2\), \(H(0) = 2\), \(h = 25\), \(T = 6\) (a) the dynamic of \(C(t)\), (b) the dynamic of \(S(t)\), (c) the dynamic of \(O(t)\), (d) the dynamic of \(H(t)\), (e) the dynamic of \(C(t)\) and \(S(t)\), (f) the dynamic of \(S(t)\) and \(H(t)\)
7 Conclusion
In this work, we presented an impulsive CSOH model for managing squirrels on the coconut farm. The basic properties of the model and the conditions for the squirrel eradication have been provided. For the pulsing strategy, we have assigned a fixed 6-month period for each pulsing action to test the effect of hunters released on the number of squirrels and coconut outputs. The numerical experiments have shown that it is possible to eliminate all the squirrels from the coconut farm. However, the zero squirrel equilibrium has no meaning in the biological sense which requires that all species should be allowed to live together. Therefore, we suggest that the number of squirrels hunters pulsing into a coconut farm should be determined by taking into account the intervention time, expenditure, ecological reasons, and emotional sensitivity of the village members.
References
Berryman, A.A.: The orgins and evolution of predator–prey theory. Ecology 73(5), 1530–1535 (1992)
Tang, S., Xiao, Y., Chen, L., Cheke, R.A.: Integrated pest management models and their dynamical behaviour. Bull. Math. Biol. 67(1), 115–135 (2005)
Tang, S., Cheke, R.A.: State-dependent impulsive models of integrated pest management (IPM) strategies and their dynamic consequences. J. Math. Biol. 50(3), 257–292 (2005)
Tang, S., Cheke, R.A.: Models for integrated pest control and their biological implications. Math. Biosci. 215(1), 115–125 (2008)
Tang, S., Tang, G., Cheke, R.A.: Optimum timing for integrated pest management: modelling rates of pesticide application and natural enemy releases. J. Theor. Biol. 264(2), 623–638 (2010)
Xiao, Q., Dai, B.: Dynamics of an impulsive predator–prey logistic population model with state-dependent. Appl. Math. Comput. 259, 220–230 (2015)
Sun, K., Zhang, T., Tian, Y.: Dynamics analysis and control optimization of a pest management predator–prey model with an integrated control strategy. Appl. Math. Comput. 292, 253–271 (2017)
Zhao, Z., Shen, L., Luo, C.: Dynamic analysis of effects of phytoplankton dispersal on zooplankton. Adv. Differ. Equ. 2016(1), 254 (2016)
Zhang, X., Li, C., Huang, T.: Impact of impulsive detoxication on the spread of computer virus. Adv. Differ. Equ. 2016(1), 218 (2016)
Zhao, Z., Song, Y., Pang, L.: Mathematical modeling of rhizosphere microbial degradation with impulsive diffusion on nutrient. Adv. Differ. Equ. 2016(1), 24 (2016)
Chaiya, I., Rattanakul, C.: An impulsive mathematical model of bone formation and resorption: effects of parathyroid hormone, calcitonin and impulsive estrogen supplement. Adv. Differ. Equ. 2017(1), 153 (2017)
Liu, H., Zhang, F., Li, Q.: Impulse lethal control and contraception control of seasonal breeding rodent. Adv. Differ. Equ. 2017(1), 93 (2017)
He, Z.L., Li, J.G., Nie, L.F., Zhao, Z.: Nonlinear state-dependent feedback control strategy in the SIR epidemic model with resource limitation. Adv. Differ. Equ. 2017(1), 209 (2017)
Bainov, D.D., Simeonov, P.S.: System with Impulse Effect, Theory and Applications. Ellis Harwood Series in Mathematics and Its Applications. Ellis Harwood, Chichester (1989)
Cai, S., Jiao, J., Li, L.: Dynamics of a single population system with impulsively unilateral diffusion and impulsive input toxins in polluted environment. Adv. Differ. Equ. 2015(1), 308 (2015)
Zhou, A., Sattayatham, P., Jiao, J.: Analysis of a predator–prey model with impulsive diffusion and releasing on predator population. Adv. Differ. Equ. 2016(1), 111 (2016)
Jiao, J., Cai, S., Li, L., Zhang, Y.: Dynamics of a predator–prey model with impulsive biological control and unilaterally impulsive diffusion. Adv. Differ. Equ. 2016(1), 150 (2016)
Lakshmikantham, V., Simeonov, P.S., et al..: Theory of Impulsive Differential Equations, vol. 6. World Scientific, Singapore (1989)
Baek, H.: Dynamic analysis of an impulsively controlled predator–prey system. Electron. J. Qual. Theory Differ. Equ. 2010, 19, 1–14 (2010)
Liu, B., Zhang, Y.J., Chen, L.S., Sun, L.H.: The dynamics of a prey-dependent consumption model concerning integrated pest management. Acta Math. Sin. 21(3), 541–554 (2005)
Xiang, Z., Li, Y., Song, X.: Dynamic analysis of a pest management SEI model with saturation incidence concerning impulsive control strategy. Nonlinear Anal., Real World Appl. 10(4), 2335–2345 (2009)
Liu, B., Zhi, Y., Chen, L.: The dynamics of a predator–prey model with Ivlev’s functional response concerning integrated pest management. Acta Math. Appl. Sin. 20(1), 133–146 (2004)
Kim, H., Baek, H.: Dynamics of a predator–prey system concerning biological and chemical controls. J. Inequal. Appl. 2010(1), 598495 (2010)
Shulin, S., Cuihua, G.: Dynamics of a Beddington–DeAngelis type predator–prey model with impulsive effect. J. Math. 2013, Article ID 826857 (2013)
Jiao, J., Li, P., Feng, D.: Dynamics of water eutrophication model with control. Adv. Differ. Equ. 2018(1), 383 (2018)
Simeonov, P.: Impulsive Differential Equations: Periodic Solutions and Applications. Routledge, London (2017)
Funding
We acknowledge the support of the Centre of Excellence in Mathematics, the Commission on Higher Education, Thailand and of the Graduate College, King Mongkut’s University of Technology North Bangkok.
Author information
Authors and Affiliations
Contributions
All authors worked together to produce the results, read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Vajrapatkul, A., Koonprasert, S. & Sirisubtawee, S. An application of the impulsive CSOH model for managing squirrels in the coconut farm. Adv Differ Equ 2019, 248 (2019). https://doi.org/10.1186/s13662-019-2161-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-019-2161-x