
Abstract
Regional-scale forecasting of landslides is not a straightforward task. In this work, the spatiotemporal forecasting capability of a regional-scale landslide warning system was enhanced by integrating two different approaches. The temporal forecasting (i.e. when a landslide will occur) was accomplished by means of a system of statistical rainfall thresholds, while the spatial forecasting (i.e. where a landslide should be expected) was assessed using a susceptibility map. The test site was the Emilia Romagna region (Italy): the rainfall thresholds used were based on the rainfall amount accumulated over variable time windows, while the methodology used for the susceptibility mapping was the Bayesian tree random forest in the tree-bagger implementation. The coupling of these two methodologies allowed setting up a procedure that can assist the civil protection agencies during the alert phases to better define the areas that could be affected by landslides. A similar approach could be easily adjusted to other cases of study. A validation test was performed through a back analysis of the 2004–2010 records: the proposed approach would have led to define a more accurate location for 83 % of the landslides correctly forecasted by the regional warning system based on rainfall thresholds. This outcome provides a contribution to overcome the largely known drawback of regional warning systems based on rainfall thresholds, which presently can be used only to raise generic warnings relative to the whole area of application.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
The large amount of casualties and damages caused in the world by landslides (Petley 2012) make the forecasting of their occurrence by means of warning systems a widely discussed research topic.
Physically based models can perform at the same time spatial and temporal forecasting of landslides, since they can define when and where a landslide will occur (Baum et al. 2002, 2010; Crosta and Frattini 2003; Simoni et al. 2008; Lepore et al. 2013; Rossi et al. 2013). However, they can be adopted as forecasting cores of warning systems only if the physical properties of the terrain are known in detail, and usually in small areas (e.g. tens/hundreds of square kilometres) (Schmidt et al. 2008; Simoni et al. 2008; Segoni et al. 2009; Apip et al. 2010; Mercogliano et al. 2013).
However, in larger areas (e.g. thousands of square kilometres), a reliable application of physically based models is hindered by the computational resources needed (Baum et al. 2010; Rossi et al. 2013) and by the difficulty of assessing the spatial distribution of the values of the hydrological and geotechnical input parameters (Segoni et al. 2012). In such cases, landslide forecasting is usually performed with other heuristic or statistical methods, and assessing at the same time both spatial and temporal forecasting is not straightforward.
Regional-scale warning systems are often based on empirical rainfall thresholds (Brunsden 1973; Keefer et al. 1987; Aleotti 2004; Hong et al. 2005; Guzzetti et al. 2008; Tiranti and Rabuffetti 2010; Baum and Godt 2010; Capparelli and Tiranti 2010; Cannon et al. 2011; Jakob et al. 2012; Martelloni et al. 2012; Rosi et al. 2012; Segoni et al. 2014), which can be implemented to forecast the temporal occurrence of landslides. The empirical rainfall thresholds can be based on a variety of rainfall parameters (see e.g. Guzzetti et al. 2007and reference therein): intensity-duration thresholds are probably the most used (see e.g. Guzzetti et al. 2008 for a complete review) and are particularly established for shallow landslides; however, a consistent number of operational warning systems are currently based on the rainfall amount as measured over given time spans (Chleborad 2003; Cardinali et al. 2006; Cannon et al. 2008, 2011).
The main drawback of the warning systems based on empirical rainfall thresholds is a poor spatial resolution: a threshold overcoming produces an alert for the entire area encompassing the events used for calibration, while the location of expected landslides is poorly constrained. To improve the spatial resolution of such models, in recent years, some authors (Martelloni et al. 2012; Segoni et al. 2014) proposed, instead of a single regional threshold, a mosaic of several thresholds valid for limited areas: this approach leads to relate the warnings to a more restricted areal extent but still cannot forecast the exact localization of the landslides.
Conversely, landslide susceptibility maps are static instruments that define, in a given area, the predisposition of the territory to be affected by a landslide (Brabb 1984). In other words, susceptibility maps are used to assess where a landslide should be expected, but they do not contain any temporal information about when a landslide will occur. An overwhelming literature deals with landslide susceptibility (e.g. Guzzetti et al. 1999 or Cachon et al. 2006), and several approaches have been presented, including for example bivariate or multivariate logistic regression (Chung and Fabbri 1999; Saha et al. 2005; Can et al. 2005; Lee et al. 2007; Choi et al. 2012), discriminant analysis (Carrara 1983),weights-of-evidence methods (Bonham-Carter 1991; Pourghasemi et al. 2012), modified Bayesian estimation(Chung and Fabbri 1999), weighted linear combinations of instability factors (Ayalew et al. 2004), landside nominal risk factors (Saha et al. 2005), frequency ratio (Chung and Fabbri 2003, 2005; Choi et al. 2012), certainty factors (Pourghasemi et al. 2012), information values (Saha et al. 2005), modified Bayesian estimation (Chung and Fabbri 1999), neuro-fuzzy (Sezer et al. 2011), artificial neural networks (Catani et al. 2005; Choi et al. 2012), fuzzy logic (Akgun et al. 2012; Ercanoglu and Gokceoglu 2002), support vector machines (Brenning 2005), and index of entropy (Bednarik et al. 2012).
In literature, landslide susceptibility assessments range from the local (Gokceoglu et al. 2005) to the continental scale (Van Den Eeckhaut et al. 2012) and are usually accomplished with the aid of geographical information systems (Bonham-Carter 1991; Saha et al. 2005) or purposely developed software (Akgun et al. 2012).
The rationale behind the present work is that the pros and cons of rainfall thresholds and susceptibility maps can compensate each other, and the two approaches could be fruitfully integrated to enhance the spatiotemporal forecasting capability of regional-scale landslide early warning systems and thus the capability of civil protection agencies (CPA) to manage the alert phases.
To accomplish this result, two state-of-the-art thresholds and susceptibility models were coupled. The Emilia Romagna region (Italy) was selected as a test site: the endorsed operational regional warning system based on rainfall thresholds (Martelloni et al. 2012; Lagomarsino et al. 2013) was integrated with a regional-scale susceptibility map, purposely developed using the recently proposed approach “Bayesian tree random forest” (Breiman 2001; Brenning 2005; Vorpahl et al. 2012; Catani et al. 2013). The results showed that the coupling of the two methodologies enhanced the forecasting effectiveness of the warning system. The “Discussion” section focusses on the possibility of applying the methodology to other case studies and presents a multi-tier approach that improves the warning system and can be used to assist civil protection agencies in managing the alert phases.
Materials and methods
Study area
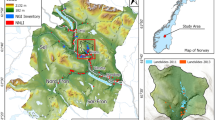
The study area is the hilly and mountainous sector (about 13,200 km2) of the Emilia Romagna region (Northern Italy) (Figs. 1 and 2). This is dominated by the Apennines, a fold and thrust belt with a maximum elevation of 2,165 m, which is mainly constituted by turbiditic deposits (flysch) where layers of massive rock (mainly sandstones and calcarenites) alternate with layers of pelites with variable thickness. Other very frequent lithologies are clays and evaporites.

Subdivision of the Emilia Romagna region into eight alert zones (AZ) and 25 territorial units (TU); each TU is equipped with a reference rain gauge

Landslide inventory and morphometry of the Emilia Romagna region
The area is extremely prone to landslides (“Landslide inventory” section); the most recurrent typology is the rotational/translational slide, which is typical of the flysch geological formations, but also slow earth flows (typical of the clayey lithologies) and complex movements (mainly slides evolving in flows) are common. Shallow landslides and debris flows occur in smaller numbers, but their occurrence has markedly increased in the last few years (Martina et al. 2010). Even if a significant number of landslides is triggered by snow melting (Martelloni et al. 2013), rainfall is by far the main triggering factor: debris flows and shallow landslides are triggered by short but exceptionally intense rainfall, while deep-seated landslides and earth flows have a more complex response to rainfall and are mainly influenced by moderate but exceptionally prolonged (even up to 6 months) periods of rainfalls (Ibsen and Casagli 2004; Benedetti et al. 2005).
The area has a typical Mediterranean climate, with a warm and dry season (typically from May to October) alternating with a cool and wet season (typically from November to April). The mean annual precipitation averaged in the whole study area is about 1,000 mm, with localized peak values of about 2,000 mm encountered in the highest mountains (Martelloni et al. 2012).
Current regional landslide warning system
Sistema Integrato Gestione Monitoraggio Allerte (Integrated System for Monitoring and Managing Alerts, SIGMA) is the warning system currently used by the Emilia Romagna Civil Protection Agency to forecast rainfall-triggered landslides. SIGMA was designed and applied for the first time in 2005 (Benedetti et al. 2005), but it has undergone several modifications in recent years (Martelloni et al. 2012; Lagomarsino et al. 2013) in order to meet the need of the regional civil protection agency for managing the hazard related to landslides with a single tool. Therefore, SIGMA was purposely designed to take into account both landslides triggered by short and exceptionally intense rainstorms (e.g. shallow landslides) and landslides triggered by exceptionally prolonged rainfalls (e.g. deep seated rotational slides and earth flows).
The final aim of the warning system, according to the civil protection agency procedures, is to set on daily basis an alert level among four possible ones (absent, ordinary criticality, moderate criticality and high criticality) for each of the eight alert zones (AZ) in which the Emilia Romagna region is subdivided (Fig. 1).
Each alert zone is monitored by means of a varying number of rain gauges, each representative of a surrounding portion of territory called a territorial unit (TU) (Fig. 1). Overall, the study area is partitioned into 25 territorial units, each associated to a representative rain gauge (RRG) (Lagomarsino et al. 2013).
For each RRG, the historical daily recordings were collected and used to build the time series of rainfall accumulation from 1 to 243 days (the maximum accumulation period used by SIGMA). The time series were analysed with a statistical procedure explained in detail by Martelloni et al. (2012) to define the σ curves, which are based on outlier values of cumulative rainfall, quantified as multiples of the standard deviation (σ, hence the name of both the curves and the warning system).
Each representative rain gauge has its peculiar family of sigma curves (1σ, 1.05σ, 1.1σ, 1.15σ,…, 3.5σ) based on its own time series, and some of these sigma curves were selected as rainfall thresholds used by a decisional algorithm. During a calibration procedure (Martelloni et al. 2012), for each RRG, all sigma curves were compared to the rainfalls that triggered some landslides in the reference territorial unit. This procedure allowed selecting as thresholds of each RRG the sigma curves that minimize the errors committed by the decisional algorithm within each territorial unit. Because of the calibration procedure, for different rain gauges, the thresholds can be based on different sigma values.
The decisional algorithm at the core of the warning system is based on the comparison between the above mentioned thresholds and the rainfall data (recorded and forecasted). Basically, high values of sigma (from 3.00 to 3.50 depending on the TU) are compared with the cumulative rainfall recorded for short periods of accumulation (1, 2 and 3 days). Conversely, lower values of sigma (from 1.50 to 1.95) are compared with longer cumulative rainfall records (ranging from 4 to 243 days, depending on the seasonality) (Martelloni et al. 2012; Lagomarsino et al. 2013). The structure of the decisional algorithm is consistent with the triggering mechanism of landslides: in Emilia Romagna, landslides can be triggered either by short and exceptionally intense rainstorms or by exceptionally long (even if not particularly intense) rainfalls (Martelloni et al. 2012), and SIGMA was purposely designed to manage both kinds of rainfall with a single tool.
The decisional algorithm provides a daily criticality level for each territorial unit using the four alert levels adopted in the civil protection procedure.
Despite the SIGMA warning system having demonstrated a good predictive capacity (Martelloni et al. 2012), it was observed that at the TU level, the relationship between the severity of the forecasted criticality level and the severity of the effects to the ground (i.e. landslides number) is not strongly constrained. According to the analysed records, from one TU to another, and even within the same TU, events characterized by the same criticality level can be associated to a very different number of landslides. This outcome, together with the necessity of issuing alerts at the AZ scale (according to the CPA guidelines), led to define a procedure to aggregate the TU outputs at the AZ scale (Lagomarsino et al. 2013). For each territorial unit, a weight was calculated dividing its landslide area by the landslide area of the whole alert zone. Then, the alert zone criticality index can be determined by adding the criticality level of each TU (this value changes according to rainfall) multiplied by its weight (this value is static): a value from 0 to 3 can be obtained for the whole alert zone. This criticality index was calculated for past and well-documented events, then for each AZ, a correspondence was set between the criticality index values, the number of expected landslides and the corresponding criticality level at AZ scale according to CPA guidelines (0–1 landslides at the absent criticality level, 2–19 landslides at the ordinary criticality level, 20–59 landslides at the moderate criticality level and at least 60 landslides at the high criticality level) (Lagomarsino et al. 2013). The warning system refers to “landslides” in general, as no distinction is made between the different possible landslide typologies.
The warning system is completed by an additional forecasting module that takes into account the effects of snow accumulation and snowmelt (Martelloni et al. 2013), which can occasionally trigger a significant number of landslides in the mountainous territories.
As a consequence, the SIGMA warning system can be conveniently used to forecast the temporal occurrence of landslides and the severity of the hazard scenarios (i.e. approximate number of landslides expected in each alert zone). However, similarly to other threshold-based models, SIGMA has a very coarse spatial resolution, because warning levels are issued for each alert zone, with a typical areal extent of a few thousands of square kilometres. To get more detailed information about where an event will occur, a more accurate spatial prediction analysis is required.
Landslide susceptibility assessment
Landslide susceptibility maps represent the distributed relative probability of occurrence of landslides in space, without taking into consideration the probability of occurrence in time (Brabb 1984). An extensive literature exists on landslide susceptibility techniques (see e.g. Cachon et al. 2006). At the regional scale, the techniques most widely used are probably discriminant analysis (Carrara 1983) and logistic regression (Garcia-Rodriguez et al. 2008; Van Den Eeckhaut et al. 2012; Manzo et al. 2013), but a number of other techniques have proved themselves reliable and in some cases more flexible, such as artificial neural networks (Catani et al. 2005), linear regression (Atkinson and Massari 1998) or Bayesian methods (Catani et al. 2013).
In addition to the selected methodology, the quality of the susceptibility map greatly depends also on the quality of the input data, especially the choice of the explanatory variables of the model and the quality and completeness of the landslide inventory used to calibrate the susceptibility model.
In this work, a susceptibility map was developed with the specific aim of obtaining a complete integration with SIGMA and within the civil protection procedures. To ensure a conceptual homogeneity between the rainfall thresholds and the susceptibility map, a single susceptibility assessment was performed considering all the landslide typologies encountered in the Emilia Romagna region (“Study area” and “Landslide inventory” sections). Even if the scientific literature more frequently reports detail-scale studies addressing a specific kind of landslide, in small-scale (e.g. regional scale) studies, it is possible to consider various types of landslides without distinction among them, still with acceptable results (Cachon et al. 2006).
Landslide inventory
The landslide susceptibility model was calibrated and validated by means of the Inventariodei Fenomeni Franosi in Italia (IFFI) landslide inventory, the most complete landslide database available in Italy. In the Emilia Romagna, the IFFI database is characterized by a very high degree of completeness (Trigila et al. 2010), containing 70,037 landslide polygons mapped at the 1:10,000 scale, for a total areal extent of 2,510 km2 (11.35 % of the regional territory and 23.15 % of the study area, which excludes the flat territory to the north and east) (Fig. 2). According to the IFFI database, 44 % of the landslides are classified as “rotational/translational slides”, 30 % as “slow earth flows” and 25 % as “complex movements” (Cruden and Varnes 1996). Unfortunately, this classification does not allow a complete characterization of the triggering mechanism: in landslide polygons classified as “complex movements”, the combination of typologies involved is not explicitly reported; moreover, the “rotational/translational slides” class includes both deep-seated rotational slides and shallow translational movements. The poor detail of the triggering mechanism strengthens the necessity of performing a single susceptibility assessment.
Explanatory variables
The choice of the variables to be used to obtain the best susceptibility assessment is not straightforward. To reduce subjectivity, a large number (25) of variables were initially selected, then an automated procedure of forward selection of the optimal configuration of the model based on quantitative analyses was implemented (“Landslide susceptibility model” section). The 25 morphometric and thematic attributes initially selected as possible variables of the susceptibility model are presented in Table 1.
A grid raster of each morphometric or thematic attribute was originally created with a 20-m resolution (the native resolution of the DEM available), then these rasters were resampled at 100–m resolution, as the final susceptibility map was conceived to be at the 1:100,000 scale. During the resampling process, each attribute was split into two variables: one considering the average value encountered in the 100-m cell (mean value for numerical attributes, or prevailing class for categorical values), the other considering its variability inside the 100-m cell (standard deviation for numerical attributes or variety—i.e. number of classes—for categorical values).
Landslide susceptibility model
To generate the landslide susceptibility map, a random forest implementation developed in Matlab was adopted (tree-bagger object (RFtb) and methods). Random forest is a nonparametric multivariate technique implemented by Breiman (2001). It is a machine learning algorithm, where a large number of classification trees are grown considering a subset of predictor variables randomly chosen; the observations not used to build the model are referred to as “out-of-bag” (OOB) (Breiman 2001). The number of trees chosen to build the model is fundamental for the stability of the model: an ensemble of trees yields better predictions than a single tree (Strobl et al. 2008). However, it is necessary to consider that a high number of trees can lead to an excessive computational effort. In our case of study, 200 trees were used, as Catani et al. (2013) showed that above this number, only negligible ameliorations can be expected.
The methodology adopted has the advantages of not requiring assumptions about the distribution of the data, and both numerical and categorical variables can be used. Furthermore, it can account for interactions and nonlinearities among variables (Bachmair and Weiler 2012).
The susceptibility model was trained using a random sample of the 10 % of the cells in which the study area was subdivided. An independent dataset of the same size was used for the validation. To get an idea of the dimension of the samples used for statistical analysis, it is worth pointing out that 104,350 random points were used for training and another 104,350 were used for validation, without a predetermined proportion between landslide points and no-landslide points. Catani et al. (2013) demonstrated that such a sampling strategy provides better susceptibility assessments than other strategies based on regular schemes.
Feature selection
RFtb allows identifying the classification power of each predictor variable: the parameter importance can be estimated and ranked by considering the increase in the prediction error when OOB data for that variable is permuted while all others are left unchanged (Liaw and Wiener 2002).
To find the optimal configuration of the parameter set (i.e. how many and which variables have to be taken into account by the susceptibility model), the training points are used to build the model with the complete parameter set (full configuration). Then, iteratively, the least important parameter is removed and the feature subset is applied to the test points. The optimal configuration is that which involves the lowest value of misclassification probability (Catani et al. 2013).
The outcomes of the feature selection procedure are summarized in Fig. 3: starting from the full configuration (25 parameters), and pruning one parameter at each iteration, the relative importance of the parameters is expressed by the colour ranging from yellow to red. In each iteration, the least important parameter is discarded and assumes the grey colour in the figure. The black box indicates the best configuration (i.e. the one with the lowest prediction error), obtained using 21 parameters. This configuration makes use of all the parameters listed in Table 1, except for variety of lithology, combo curvature, combo curvature variety and land use variety, which were excluded from the model.

Scheme representing the forward selection of parameters; parameters are ranked based on the relative importance for each configuration. The black box represents the optimal configuration, obtained considering 21 parameters
Regional susceptibility map
The optimal configuration identified during the feature selection procedure was applied to the whole study area and produced a raster map with a 100-m resolution, in which each pixel is characterized by a continuous value between 0 and 1 that expresses its probability of being affected by a landslide.
According to Begueria (2006) and Frattini et al. (2010), a receiver operating characteristic (ROC) curve (Swets 1988; Fawcett 2006) was built comparing the landslides in the IFFI database and the susceptibility value in the study area (Fig. 4). The area under curve (AUC) value is 0.71 and indicates that a significant portion of the region could be affected by landslides in the future.

ROC and AUC of the susceptibility map
To ease the interpretation of the map and the integration in the regional early warning system, the probability values were reclassified into four classes, following a subdivision similar to the criticality levels used by the warning system SIGMA: low, moderate, high and very high susceptibility (Fig. 5). The identification of the class breaks was obtained comparing the cumulative density function of the susceptibility values encountered within the landslide polygons (cdfL) with the cumulative density function of the susceptibility values encountered in the whole area (cdfT). The plot of the difference between the derivatives of cdfL and cdfT can be used to identify those susceptibility values where a sudden increase in the cdfL curve is not accompanied by a similar increase in the cdfT (Fig. 6). These values were selected as class breaks, since they suggest a major change in the relationship between mapped landslides and susceptibility values (Catani et al. 2005).

The Emilia Romagna susceptibility map

Plot of cdfL, cdfT and the difference of their derivatives used to define the susceptibility classes
Integration between susceptibility map and rainfall thresholds
Spatial match
The susceptibility map and the rainfall thresholds used in the SIGMA warning system were calibrated using two different landslide datasets: the IFFI inventory and a regional inventory made up of official records of the regional civil protection agency, respectively. The two databases pertain to two distinct periods, as the first is updated to 2006 and the second spans from 2004 to 2010. Moreover, the two databases contain different landslides mapped with different approaches and purposes. Therefore, the regional CPA landslide database was overlain to the susceptibility map to provide a first and not obvious proof of the possibility of coupling these two methodologies. In addition, independent of the timing predictions, this operation is useful to know how many landslides of the regional CPA database were correctly located by the susceptibility map. On a total of 1,680 landslides, almost half is located in highly susceptible areas, 35 % in very highly susceptible areas, 13 % in moderately susceptible areas and only 2 % of them fall in the low susceptibility class (Table 2). Furthermore, the landslide density (expressed as the number of landslides per square kilometre) is directly related to the severity of the susceptibility class (Table 2). These statistics can be considered an indicator of the effectiveness of the susceptibility map and a proof of the possibility of coupling the susceptibility map with the rainfall threshold-based warning system.
Integration in the spatiotemporal prediction
To obtain a full integration between susceptibility mapping and rainfall threshold-based warning system, we propose a quantitative correlation between the dynamic criticality levels forecasted by SIGMA and the static subdivision of the territory into susceptibility classes.
The proposed correlation scheme is based on the generic assumption that increasing the severity of the rainfall event (the criticality level of a warning system), the conditions that lead to the triggering of landslides can be reached at progressively lower susceptibility classes.
Following this assumption, when SIGMA provides a zero criticality level (C0) in a territorial unit, no landslide should be expected. When a territorial unit has a low criticality level (C1), landslides should be expected only in those areas classified as very highly susceptible (S3) by the regional landslide susceptibility map. At the C2 criticality level (moderate criticality), the severity of the rainfall is expected to trigger landslides also in the highly susceptible class (S2) in addition to the S3. In those territorial units where SIGMA provides a C3 output, the criticality level is so high that landslides could reasonably be expected even in the moderate susceptibility class (S1). This approach is summarized in Table 3.
Results
To validate the effectiveness of the proposed approach, the correlation between criticality levels and susceptibility classes was checked for all the landslide events recorded by the civil protection agency from 2004 to 2010. Table 4 sums up how effective this correlation scheme is in refining the spatial resolution of SIGMA. In bold are the number of landslides predicted by SIGMA and occurred in a suitable susceptibility class (thus, landslides for which the proposed interpretation provided a successful improvement of the spatial resolution). In italics are the number of landslides not correctly predicted by SIGMA (as erroneously assigned to an absent criticality level), for which the integration with the susceptibility map could not be applied. The other numbers refer to landslides occurred in a criticality level/susceptibility class combination that does not meet our hypothesis. The statistics based on the 7-year record at our disposal shows that when SIGMA correctly forecasts a landslide, the integration with the susceptibility map correctly refines the spatial location of the landslide in 83 % of the cases.
Discussion
Reproducibility perspectives
A similar approach could be easily adjusted to other cases of study where a warning system is based on a number of different alert levels and a susceptibility map is reclassified with the same number of susceptibility classes. Consequently, other yes/no matrixes different to the one proposed in Table 3 could be taken into account. As an instance, YES cases could be extended to the C1/S2 and S1/C2 combinations. This would bring the advantage of a higher percentage of correct predictions (96 % in our case of study), but the drawback of a relevant reduction of the spatial resolution improvement, as the landslides would be expected on a much wider territory.
Another important issue that should be addressed when implementing the proposed methodology in other cases of study is the landslide typology involved. It is important to have a full correspondence between the rainfall thresholds and the susceptibility map. Therefore, if a rainfall threshold warning system is conceived for a specific landslide typology (e.g. intensity-duration thresholds for shallow landslides), the landslide susceptibility assessment should be based on the same landslide typology.
Multi-tier integration in civil protection procedures
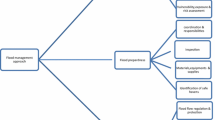
Given the satisfactory results obtained in the validation procedure, the proposed integration between rainfall thresholds and susceptibility map could be fully integrated into the procedures of the civil protection agency. A multi-tier approach that considers different spatial resolutions of the forecasting results is proposed (Fig. 7).

Multi-tier approach to integrate the proposed methodology within civil protection procedures
The first and coarser resolution uses alert zones as basic spatial units and corresponds directly to the final outputs of the state-of-art SIGMA warning system (Fig. 7—first tier). It is important to take into account this resolution level because at this stage, the warning system outputs are closely related to a quantitative hazard scenario (i.e. number of landslides expected). The interpretation of the SIGMA output is directly put in correspondence with the CPA guidelines; therefore, CPA can use this information to start coordinating the personnel and to send preliminary warnings to other authorities.
Territorial units (TU) are subdivisions of the alert zones and, on one hand, they represent a finer level of resolution (Fig. 7—second tier); on the other hand, they are the basic spatial units at which the forecasting core of the SIGMA warning system works. Despite this strict connection, the criticality level forecasted by SIGMA at the territorial unit level does not give an exact scenario of the expected level of hazard. Nevertheless, this information can be used to select the territorial units with the most critical situations, because the reference rain gauges provide a direct feedback of the severity of the rainfall event.
The subsequent stage of spatial resolution takes into account municipalities as the basic spatial unit (Fig. 7—third tier). Municipalities are the finest level of the Italian Civil Protection structure: Mayors are expected to make decisions and are supposed to know in detail the territory of their municipality and the main elements exposed to risk; moreover, each municipality has a specific emergency plan. Therefore, the regional susceptibility map was resampled to give an averaged susceptibility index to each municipality: this static information can be used to rank the municipalities according to their landslide susceptibility. In this way, during the operative scenario, the municipalities with the relatively highest level of hazard can be identified and the communication procedures can be optimized to focus the operational efforts based on a defined rank of priorities.
The last and finest stage of resolution is the 100-m pixel of the susceptibility map (Fig. 7—fourth tier). Even if this is static information, it can be coupled with the outputs of SIGMA to better localize the portions of the territory where the probability of having a landslide is higher. The localization of the pixels most exposed to landslide hazards can be used for a preliminary identification of the threatened assets, settlements and infrastructure; therefore, this information can be used as a valuable tool to assist the personnel managing the emergency.
The system and the procedure are open to further developments towards a real-time risk assessment: the most hazardous spots identified with the proposed procedure could be overlaid in a GIS system to thematic maps of the elements at risk, with the aim of defining more precisely risk scenarios for every expected rainstorm.
Spatial resolution improvement
The proposed multi-tier approach allows a consistent improvement of the spatial resolution of the regional-scale early warning system.
As shown in Fig. 8, the SIGMA warning system output provides an indication of the approximate number of landslides expected in each alert zone, without any indication on where these landslides are more likely to be triggered (Fig. 8a). The integration with susceptibility mapping proposed in this work considerably circumscribes the spots where landslides should be expected, especially in those AZ where low or moderate criticality levels are forecasted (Fig. 8b). The main outcome of the research presented in this paper is represented by the generation of dynamic maps as those shown in Fig. 8b, where pixels highlighting the possibility of landslide occurrence turn on and off depending on the rainfalls interesting each territorial unit.

Comparison between a map provided by the state-of-art warning system SIGMA (a) and the integrated map proposed in this manuscript (b): while the first forecasts a generic alert level, the latter forecasts where landslides should be expected
Figure 9, using as an example the event of 24 November 2007 in Emilia Romagna, shows how the spatial resolution enhancement is progressively incorporated in the proposed multi-tier approach:

Different levels of spatial resolution considered in the integrated approach, as for the 24 November 2007 event: a the region is subdivided into alert zones, and SIGMA forecasts a criticality level for each of them; b the subdivision of the most critical alert zone into territorial units is shown; c the susceptibility index allows ranking each municipality based on the relative predisposition to landslides; d the 100-m-resolution susceptibility map of the most susceptible municipality is shown
-
Alert zone level: SIGMA forecasts a high criticality in alert zone G (about 3,000 km2) (Fig. 9a).
-
The highest impact is expected in territorial unit 20 (606 km2), as its reference rain gauge provides the highest criticality level (Fig 9b).
-
The susceptibility assessment highlights the municipality of Varsi (79 km2) as the most susceptible to landslides (Fig 9c): the mayor can be promptly alerted.
-
Based on the integration between SIGMA output and susceptibility classes, landslides are expected in S2, S3 and S4 classes. In a municipality highly susceptible to landslides like Varsi, this does not bring an important restriction of the possible area of occurrence (77 km2, Fig. 9d). On the contrary, in those territorial units where the criticality level is lower, the spatial resolution is more markedly improved: in TU 21 (212 km2), a moderate criticality is forecasted by SIGMA (Fig. 9b); therefore, landslides are expected only in S4 class, restricting the possible extent to 15 km2 in the whole territorial unit.
Conclusion
Although rainfall thresholds are widely used to forecast the timing of landslides and susceptibility maps are a widespread tool to assess where landslides are more likely to occur, to our knowledge, the two methodologies have never been integrated in an operational regional-scale warning system for rainfall-induced landslides. This work shows a first attempt of coupling these two methodologies to enhance the predictive capability of a regional warning system.
A regional-scale warning system (SIGMA—Martelloni et al. 2012; Lagomarsino et al. 2013) was used to approximately forecast how many landslides are expected in each subdivision of the study area, while a regional susceptibility map was purposely developed to subdivide the region into four susceptibility classes of increasing probability of being affected by landslides.
A procedure to correlate the criticality levels forecasted by SIGMA and the susceptibility classes provided by the map was proposed. The interpretation of the results is straightforward, easy to perform by the civil protection personnel and could be easily applied to other cases of study. Basically, the higher the criticality level forecasted by the rainfall thresholds, the lower the minimum susceptibility class in which landslides could be expected and, thus, the larger the portion of the territory to be considered exposed at risk in the reference area of each rain gauge. The 100-m-resolution susceptibility map can easily identify these portions of the territory. Although the proposed methodology is still far from obtaining a pinpoint localization of the landslides, it represents an important advance in the spatial resolution of regional-scale warning systems based on rainfall thresholds. A validation test performed using civil protection data collected in a 7-year time span highlighted that the proposed methodology could define a more accurate location for 83 % of the landslides correctly forecasted by the SIGMA warning system. This outcome provides a contribution to overcome the largely known drawback of regional warning systems based on rainfall thresholds, which presently can be used only to raise generic warnings relative to the whole area of application. Moreover, the coupling of these two methodologies allowed setting up an interpretation procedure that can assist civil protection agencies in managing the alert and the emergency phases.
References
Akgun A, Sezer EA, Nefeslioglu HA, Gokceoglu C, Pradhan B (2012) An easy-to-use MATLAB program (MamLand) for the assessment of landslide susceptibility using a Mamdani fuzzy algorithm. Comput Geosci 38(1):23–34
Aleotti P (2004) A warning system for rainfall-induced shallow failures. Eng Geol 73:247–265
Apip TK, Yamashiki Y, Sassa K, Ibrahim AB, Fukuoka H (2010) A distributed hydrological–geotechnical model using satellite-derived rainfall estimates for shallow landslide prediction system at a catchment scale. Landslides 7:237–258
Atkinson PM, Massari R (1998) Generalized linear modeling of susceptibility to landsliding in the central Apennines, Italy. Comput Geosci 24:373–385
Ayalew L, Yamagishi H, Ugawa N (2004) Landslide susceptibility mapping using GIS based weighted linear combination, the case in Tsugawa area of Agano River, Niigata Prefecture, Japan. Landslides 1(1):73–81
Bachmair S, Weiler M (2012) Hillslope characteristics as controls of subsurface flow variability. Hydrol Earth Syst Sci Discuss 9:6889–6934
Baum RL, Godt JW (2010) Early warning of rainfall-induced shallow landslides and debris flows in the USA. Landslides 7:259–272
Baum RL, Savage W, Godt J (2002) Trigrs: a FORTRAN program for transient rainfall infiltration and grid-based regional slope stability analysis. Open-file Report, US Geol Survey
Baum RL, Godt JW, Savage WZ (2010) Estimating the timing and location of shallow rainfall-induced landslides using a model for transient unsaturated infiltration. J Geophys Res 115:F03013. doi:10.1029/2009JF001321
Bednarik M, Yilmaz I, Marschalko M (2012) Landslide hazard and risk assessment: a case study from the Hlohovec–Sered’ landslide area in south-west Slovakia. Nat Hazards. doi:10.1007/s11069-012-0257-7
Begueria S (2006) Validation and evaluation of predictive models in hazard assessment and risk management. Nat Hazards 37:315–329
Benedetti A, Casagli N, Bosi V, Dapporto S, Ciolli S, Palmieri M, Zinoni F (2005) Modellostatistico per la previsione operativa dei fenomeni franosi nella regione Emilia-Romagna. Boll Soc Geol Italy 124:333–344
Bonham-Carter GF (1991) Integration of geoscientific data using GIS. In: Goodchild MF, Rhind DW, Maguire DJ (eds) Geographic information systems: principle and applications. Longdom, London, pp 171–184
Brabb EE (1984) Innovative approaches to landslide hazard mapping, 1st edn. Proceedings 4th International Symposium on Landslides, Toronto, pp 307–324
Breiman L (2001) Random forests. Mach Learn 45:5–32
Brenning A (2005) Spatial prediction models for landslide hazards: review, comparison and evaluation. Nat Hazards Earth Syst Sci 5:853–862
Brunsden D (1973) The application of system theory to the study of mass movement. Geol App Idrogeoeol 8(1):185–207
Cachon J, Irigaray C, Fernandez T (2006) Engineering geology maps: landslides and geographical information systems. Bull Eng Geol Environ 65:341–411
Can T, Nefeslioglu HA, Gokceoglu C, Sonmez H, Duman TY (2005) Susceptibility assessments of shallow earthflows triggered by heavy rainfall at three subcatchments by logistic regression analyses. Geomorphology 72(1–4):250–271
Cannon SH, Gartner JE, Wilson R, Bowers J, Laber J (2008) Storm rainfall conditions for floods and debris flows from recently burned areas in southwestern Colorado and southern California. Geomorphology 96:250–269
Cannon SH, Boldt EM, Laber JL, Kean JW, Staley DM (2011) Rainfall intensity–duration thresholds for postfire debris-flow emergency-response planning. Nat Hazards 59:209–236
Capparelli G, Tiranti D (2010) Application of the MoniFLaIR early warning system for rainfall-induced landslides in Piedmont region (Italy). Landslides 7(4):401–410
Cardinali M, GalliM GF, Ardizzone F, Reichenbach P, Bartoccini P (2006) Rainfall induced landslides in December 2004 in Southwestern Umbria, Central Italy. Nat Hazard Earth Sys Sci 6:237–260
Carrara A (1983) Multivariate methods for landslide hazard evaluation. Math Geol 15(3):403–426
Catani F, Casagli N, Ermini L, Righini G, Menduni G (2005) Landslide hazard and risk mapping at catchment scale in the Arno River Basin. Landslides 2(4):329–342
Catani F, Lagomarsino D, Segoni S, Tofani V (2013) Exploring model sensitivity issues across different scales in landslide susceptibility. Nat Hazards Earth Syst Sci 13:2815–2831
Chleborad AF (2003) Preliminary evaluation of a precipitation threshold for anticipating the occurrence of landslides in the Seattle, Washington Area. US Geol Surv Open-File Rep 03:463
Choi J, Oh HJ, Lee HJ, Lee C, Lee S (2012) Combining landslide susceptibility maps obtained from frequency ratio, logistic regression, and artificial neural network models using ASTER images and GIS. Eng Geol 124:12–23
Chung CJ, Fabbri AG (1999) Probabilistic prediction models for landslide hazard mapping. Photogramm Eng Rem S 65(12):1389–1399
Chung CJ, Fabbri AG (2003) Validation of spatial prediction models for landslide hazard mapping. Nat Hazards 30:451–472
Chung CJ, Fabbri AG (2005) Systematic procedures of landslide hazard mapping for risk assessment using spatial prediction models. In: Glade T, Anderson MG, Crozier MJ (eds) Landslide hazard and risk. Wiley, New York, pp 139–177
Crosta GN, Frattini P (2003) Distributed modelling of shallow landslides triggered by intense rainfall. Nat Hazards Earth Syst Sci 3:81–93
Cruden DM, Varnes DJ (1996) Landslides types and processes. In: Turner AK, Schuster RL (eds) Landslides: investigation and mitigation. Transportation Research Board Special Report 247, National Academy Press, WA, pp 36–75
Ercanoglu M, Gokceoglu C (2002) Assessment of landslide susceptibility for a landslide prone area (north of Yenice, NW Turkye) by fuzzy approach. Environ Geol 41:720–730
Fawcett T (2006) An introduction to ROC analysis. Pattern Recognit Lett 27:861–874
Frattini P, Crosta G, Carrara A (2010) Techniques for evaluating the performance of landslide susceptibility models. Eng Geol 111:62–72
Garcia-Rodriguez MJ, Malpica JA, Benito B, Diaz M (2008) Susceptibility assessment of earthquake-triggered landslides in El Salvador using logistic regression. Geomorphology 95:172–191
Gokceoglu C, Sonmez H, Nefeslioglu HA, Duman TY, Can T (2005) The March 17, 2005 Kuzulu landslide (Sivas, Turkey) and landslide susceptibility map of its close vicinity. Eng Geol 81:65–83
Guzzetti F, Carrara A, Cardinali M, Reichenbach P (1999) Landslide hazard evaluation: a review of current techniques and their application in a multi-scale study, Central Italy. Geomorphology 31:181–216
Guzzetti F, Peruccacci S, Rossi M, Stark CP (2008) The rainfall intensity–duration control of shallow landslides anddebris flows: an update. Landslides 5(1):3–17
Hong Y, Hiura H, Shino K, Sassa K, Suemine A, Fukuoka H, Wang G (2005) The influence of intense rainfall on the activity of large-scale crystalline schist landslides in Shikoku Island, Japan. Landslides 2(2):97–105
Ibsen ML, Casagli N (2004) Rainfall patterns and related landslide incidence in the Porretta-Vergato region, Italy. Landslides 1:143–150
Jakob M, Owen T, Simpson T (2012) A regional real-time debris-flow warning system for the District of North Vancouver, Canada. Landslides 9:165–178
Keefer DK, Wilson RC, Mark RK, Brabb EE, Brown WM III, Ellen SD, Harp EL, WieczoreckGF ACS, Zatkin RS (1987) Real-time landslide warning during heavy rainfall. Science 238:921–926
Lagomarsino D, Segoni S, Fanti R, Catani F (2013) Updating and tuning a regional scale landslide early warning system. Landslides 10:91–97
Lee S, Ryu JH, Kim IS (2007) Landslide susceptibility analysis and its verification using likelihood ratio, logistic regression, and artificial neural network models: case study of Youngin, Korea. Landslides 4:327–338
Lepore C, Arnone E, Noto LV, Sivandran G, Bras RL (2013) Physically based modeling of rainfall-triggered landslides: a case study in the Luquillo forest, Puerto Rico. Hydrol Earth Syst Sci 17:3371–3387
Liaw A, Wiener M (2002) Classification and regression by random forest. R News 2:18–22
Manzo G, Tofani V, Segoni S, Battistini A, Catani F (2013) GIS techniques for regional-scale landslide susceptibility assessment: the Sicily (Italy) case study. Int J Geogr Inf Sci 27(7):1433–1452
Martelloni G, Segoni S, Fanti R, Catani F (2012) Rainfall thresholds for the forecasting of landslide occurrence at regional scale. Landslides 9(4):485–495
Martelloni G, Segoni S, Lagomarsino D, Fanti R, Catani F (2013) Snow Accumulation-Melting Model (SAMM) for integrated use in regional scale landslide early warning systems. Hydrol Earth Syst Sci 17:1229–1240
Martina MLV, Berti M, Simoni A, Todini E, Pignone S (2010) Un approccio bayesiano per individuare le soglie di innesco delle frane. In: Picarelli L, Tommasi P, Urcioli G, Versace P (eds) Rainfall-induced landslides: mechanisms, monitoring techniques and nowcasting models for early warning systems, volume 2. CIRAM, Naples
Mercogliano P, Segoni S, Rossi G, Sikorsky B, Tofani V, Schiano P, Catani F, Casagli N (2013) Brief communication: a prototype forecasting chain for rainfall induced shallow landslides. Nat Hazards Earth Syst Sci 13:771–777
Petley D (2012) Global patterns of loss of life from landslides. Geology 40(10):927–930
Pourghasemi HR, Pradhan B, Gokceoglu C, Mohammadi M, Moradi HR (2012) Application of weights-ofevidence and certainty factor models and their comparison in landslide susceptibility mapping at Haraz watershed. Iran Arab J Geosci. doi:10.1007/s12517-012-0532-7
Rosi A, Segoni S, Catani F, Casagli N (2012) Statistical and environmental analyses for thedefinition of a regional rainfall thresholds system for landslide triggering in Tuscany(Italy). J Geogr Sci 22(4):617–629
Rossi G, Catani F, Leoni L, Segoni S, Tofani V (2013) HIRESSS: a physically based slope stability simulator for HPC applications. Nat Hazards Earth Syst Sci 13:151–166
Saha AK, Gupta RP, Sarkar I, Arora KM, Csaplovics E (2005) An approach for GIS-based statisticallandslide susceptibility zonation with a case study in the Himalayas. Landslides 2(1):61–69
Schmidt J, Turek G, Clark MP, Uddstrom M, Dymond JR (2008) Probabilistic forecasting of shallow rainfall-triggered landslides using real-time numerical weather predictions. Nat Hazards Earth Syst Sci 8:349–357
Segoni S, Leoni L, Benedetti AI, Catani F, Righini G, Falorni G, Gabellani S, Rudari R, Silvestro F, Rebora N (2009) Towards a definition of a real-time forecasting network for rainfall induced shallow landslides. Nat Hazard Earth Syst Sci 9:2119–2133
Segoni S, Rossi G, Catani F (2012) Improving basin-scale shallow landslides modelling using reliable soil thickness maps. Nat Hazards 61(1):85–101
Segoni S, Rossi G, Rosi A, Catani F (2014) Landslides triggered by rainfall: a semi-automated procedure to define consistent intensity-duration thresholds. Comput Geosci 63:123–131
Sezer EA, Pradhan B, Gokceoglu C (2011) Manifestation of an adaptive neuro-fuzzy model on landslide susceptibility mapping: Klang valley, Malaysia. Expert Syst Appl 38(7):8208–8219
Simoni S, Zanotti F, Bertoldi G, Rigon R (2008) Modelling the probability of occurrence of shallow landslides and channelized debris flows using GEOtop-FS. Hydrol Process 22(4):532–545
Strobl C, Boulesteix AL, Kneib T, Augustin T, Zeileis A (2008) Conditional variable importance for random forests. BMC Bioinforma 9:307. doi:10.1186/1471-2105-9-307
Swets J (1988) Measuring the accuracy of diagnostic systems. Science 240:1285–1293
Tiranti D, Rabuffetti D (2010) Estimation of rainfall thresholds triggering shallow landslides for an operational warning system implementation. Landslides 7(4):471–481
Trigila A, Iadanza C, Spizzichino D (2010) Quality assessment of the Italian landslide inventory using GIS processing. Landslides 7(4):455–470
Van Den Eeckhaut M, HervásJ JC, MaletJP ML, Nadim F (2012) Statistical modelling of Europe-wide landslide susceptibility using limited landslide inventory data. Landslides 9:357–369
Vorpahl P, Elsenbeer H, Märker M, Schröder B (2012) How can statistical models help to determine driving factors of landslides? Ecol Model 239:27–39
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution License which permits any use, distribution, and reproduction in any medium, provided the original author(s) and the source are credited.
About this article

Cite this article
Segoni, S., Lagomarsino, D., Fanti, R. et al. Integration of rainfall thresholds and susceptibility maps in the Emilia Romagna (Italy) regional-scale landslide warning system. Landslides 12, 773–785 (2015). https://doi.org/10.1007/s10346-014-0502-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10346-014-0502-0