
Abstract
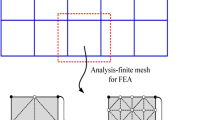
In the present work, a highly efficient moving morphable component (MMC)-based approach for multi-resolution topology optimization is proposed. In this approach, high-resolution optimization results can be obtained with a smaller number of design variables and a relatively low degree of freedoms (DOFs). This is achieved by taking the advantage that the topology optimization model and the finite element analysis model are totally decoupled in the MMC-based problem formulation. A coarse mesh is used for structural response analysis and a design domain partitioning strategy is introduced to preserve the topological complexity of the optimized structures. Numerical examples are then provided so as to demonstrate that with the use of the proposed approach, computational efforts can be saved substantially for large-scale topology optimization problems.



























Similar content being viewed by others

References
Bendsøe MP, Kikuchi N (1988) Generating optimal topologies in structural design using a homogenization method. Comput Methods Appl Mech Engng 71(2):197–224
HyperWorks A (2013) OptiStruct-12.0 user’s guide. Altair Engineering Inc
Simulia D (2011) Topology and shape optimization with Abaqus. In: Dassault Systemes Inc
Aage N, Andreassen E, Lazarov BS, Sigmund O (2017) Giga-voxel computational morphogenesis for structural design. Nature 550(7674):84–86
Borrvall T, Petersson J (2011) Large-scale topology optimization in 3D using parallel computing. Comput Methods Appl Mech Eng 190:6201–6229
Kim TS, Kim JE, Kim YY (2004) Parallelized structural topology optimization for eigenvalue problems. Int J Solids Struct 41(9–10):2623–2641
Vemaganti K, Lawrence WE (2005) Parallel methods for optimality criteria-based topology optimization. Comput Methods Appl Mech Engng 194:3637–3667
Evgrafov A, Rupp CJ, Maute K, Dunn ML (2007) Large-scale parallel topology optimization using a dual-primal substructuring solver. Struct Multidiscip Optim 36(4):329–345
Mahdavi A, Balaji R, Frecker M, Mockensturm EM (2006) Topology optimization of 2D continua for minimum compliance using parallel computing. Struct Multidiscip Optim 32(2):121–132
Aage N, Poulsen TH, Gersborg-Hansen A, Sigmund O (2007) Topology optimization of large scale stokes flow problems. Struct Multidiscip Optim 35(2):175–180
Aage N, Lazarov BS (2013) Parallel framework for topology optimization using the method of moving asymptotes. Struct Multidiscip Optim 47(4):493–505
Wang S, Sturler ED, Paulino GH (2007) Large-scale topology optimization using preconditioned Krylov subspace methods with recycling. Int J Numer Methods Engng 69(12):2441–2468
Amir O, Bendsøe MP, Sigmund O (2009a) Approximate reanalysis in topology optimization. Int J Numer Methods Engng 78(12):1474–1491
Amir O, Stolpe M, Sigmund O (2009b) Efficient use of iterative solvers in nested topology optimization. Struct Multidiscip Optim 42(1):55–72
Amir O, Sigmund O (2010) On reducing computational effort in topology optimization: how far can we go? Struct Multidiscip Optim 44(1):25–29
Kim JE, Jang GW, Kim YY (2003) Adaptive multiscale wavelet-Galerkin analysis for plane elasticity problems and its applications to multiscale topology design optimization. Int J Solids Struct 40(23):6473–6496
Stainko R (2005) An adaptive multilevel approach to the minimal compliance problem in topology optimization. Commun Numer Meth Engng 22(2):109–118
Guest JK, Smith Genut LC (2010) Reducing dimensionality in topology optimization using adaptive design variable fields. Int J Numer Methods Engng 81(8):1019–1045
Yoon GH (2010) Structural topology optimization for frequency response problem using model reduction schemes. Comput Methods Appl Mech Engng 199:1744–1763
Nguyen TH, Paulino GH, Song J, Le CH (2009) A computational paradigm for multiresolution topology optimization (MTOP). Struct Multidiscip Optim 41(4):525–539
Nguyen TH, Paulino GH, Song J, Le CH (2012) Improving multiresolution topology optimization via multiple discretizations. Int J Numer Methods Engng 92(6):507–530
Nguyen TH, Le CH, Hajjar JF (2017) Topology optimization using the p-version of the finite element method. Struct Multidiscip Optim 56(3):571–586
Groen JP, Langelaar M, Sigmund O, Ruess M (2017) Higher-order multi-resolution topology optimization using the finite cell method. Int J Numer Methods Engng 110(10):903–920
Guest JK, Prévost JH, Belytschko T (2004) Achieving minimum length scale in topology optimization using nodal design variables and projection functions. Int J Numer Methods Engng 61(2):238–254
Sigmund O (2007) Morphology-based black and white filters for topology optimization. Struct Multidiscip Optim 33(4–5):401–424
Xu S, Cai Y, Cheng G (2010) Volume preserving nonlinear density filter based on Heaviside functions. Struct Multidiscip Optim 41(4):495–505
Wang F, Lazarov BS, Sigmund O (2011) On projection methods, convergence and robust formulations in topology optimization. Struct Multidiscip Optim 43(6):767–784
Guo X, Zhang W, Zhong W (2014a) Explicit feature control in structural topology optimization via level set method. Comput Methods Appl Mech Engng 272:354–378
Guo X, Zhang WS, Zhong W (2014b) Doing topology optimization explicitly and geometrically-a new moving morphable components based framework. ASME J Appl Mech 81(8):081009
Zhang WS, Li D, Zhang J, Guo X (2016a) Minimum length scale control in structural topology optimization based on the moving morphable components (MMC) approach. Comput Methods Appl Mech Engng 311:327–355
Guo X, Zhou JH, Zhang WS, Du ZL, Liu C, Liu Y (2017) Self-supporting structure design in additive manufacturing through explicit topology optimization. Comput Methods Appl Mech Engng 323:27–63
Deng J, Chen W (2016) Design for structural flexibility using connected morphable components based topology optimization. Sci China Tech Sci 59(6):839–851
Guo X, Zhang WS, Zhang J, Yuan J (2016) Explicit structural topology optimization based on moving morphable components (MMC) with curved skeletons. Comput Methods Appl Mech Engng 310:711–748
Zhang WS, Yuan J, Zhang J, Guo X (2016) A new topology optimization approach based on moving morphable components (MMC) and the ersatz material model. Struct Multidiscip Optim 53(6):1243–1260
Zhang WS, Yang WY, Zhou JH, Li D, Guo X (2017a) Structural topology optimization through explicit boundary evolution. ASME J Appl Mech 84(1):011011
Zhang WS, Li D, Yuan J, Song JF, Guo X (2017b) A new three-dimensional topology optimization method based on moving morphable components (MMCs). Comput Mech 59(4):647–665
Zhang WS, Li D, Zhou JH, Du ZL, Li BJ, Guo X (2018) A moving morphable void (MMV)-based explicit approach for topology optimization considering stress constraints. Comput Methods Appl Mech Engng 334:381–413
Lei X, Liu C, Du ZL, Zhang WS, Guo X (2018) Machine learning driven real time topology optimization under moving morphable component (MMC)-based framework. ASME J Appl Mech 86(1):011004
Liu C, Du ZL, Zhang WS, Zhu YC, Guo X (2017) Additive manufacturing-oriented design of graded lattice structures through explicit topology optimization. ASME J Appl Mech 84(8):081008
Norato JA, Bell EK, Tortorelli DA (2015) A geometry projection method for continuum-based topology optimization with discrete elements. Comput Methods Appl Mech Engng 293:306–327
Hoang VN, Jang JW (2017) Topology optimization using moving morphable bars for versatile thickness control. Comput Methods Appl Mech Engng 317:153–173
Hou WB, Gai YD, Zhu XF, Wang X, Zhao C, Xu LK, Jiang K, Hu P (2017) Explicit isogeometric topology optimization using moving morphable components. Comput Methods Appl Mech Engng 326:694–712
Takalloozadeh M, Yoon GH (2017) Implementation of topological derivative in the moving morphable components approach. Finite Elem Anal Des 134:16–26
Sun JL, Tian Q, Hu HY (2018) Topology optimization of a three-dimensional flexible multibody system via moving morphable components. ASME J Comput Nonlinear Dyn 13(2). 021010
Kreisselmeier G, Steinhauser R (1979) Systematic control design by optimizing a vector performance index. In: IFAC symposium on computer-aided design of control systems, international federation of active controls. Zurich, Switzerland
Bendsøe MP (1995) Optimization of structural topology shape and material. Springer, New York
Sigmund O, Aage N, Andreassen E (2016) On the (non-)optimality of Michell structures. Struct Multidiscip Optim 54(2):361–373
Dewhurst P (2001) Analytical solutions and numerical procedures for minimum-weight Michell structures. J Mech Phys Solids 49(3):445–467
Andreassen E, Clausen A, Schevenels M, Lazarov BS, Sigmund O (2010) Efficient topology optimization in MATLAB using 88 lines of code. Struct Multidiscip Optim 43(1):1–16
Liu K, Tovar A (2014) An efficient 3D topology optimization code written in Matlab. Struct Multidiscip Optim 50(6):1175–1196
Svanberg K (1987) The method of moving asymptotes-a new method for structural optimization. Int J Numer Methods Engng 24(2):359–373
Burman E, Elfverson D, Hansbo P, Larson MG, Larsson K (2018) Shape optimization using the cut finite element method. Comput Methods Appl Mech Engng 328:242–261
Zhang WS, Chen JS, Zhu XF, Zhou JH, Xue DC, Lei X, Guo X (2017) Explicit three dimensional topology optimization via moving morphable void (MMV) approach. Comput Methods Appl Mech Engng 332:590–614
Acknowledgements
The authors would like to thank Prof. Oded Amir for constructive discussions and the valuable comments from anonymous reviewers on improving the quality of the present work.
Funding
The financial supports from the National Key Research and Development Plan (2016YFB0201600, 2016YFB0201601, 2017YFB0202800, 2017YFB0202802), the National Natural Science Foundation (11402048, 11472065, 11732004, 11772026, 11772076, 11502042, 11821202, 11872138), Program for Changjiang Scholars, Innovative Research Team in University (PCSIRT), and 111 Project (B14013) are also gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Responsible Editor: Ole Sigmund
Appendix
Appendix
The process of generating TDF locally can be elaborated as follows:
-
1)
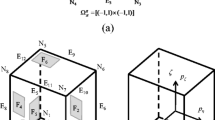
Generating a rectangle \( {\Omega}_i^{\mathrm{ext}} \) (pink region), with the use of the parameters (oi, θi, li, ti), as shown in Fig. A1b. Here the symbol oi = (xi0, yi0)⊤ denotes the vector of the coordinates of the central point of the i-th component, θi is the corresponding inclined angle, while \( {l}_i=2{a}_i\sqrt[6]{\left(1+\epsilon \right)} \) and \( {t}_i=\max \left(2{t}_i^1,2{t}_i^2\right)\sqrt[6]{\left(1+\epsilon \right)} \) are the length and width of \( {\Omega}_i^{\mathrm{ext}} \), respectively. Note that \( {\Omega}_i^{\mathrm{ext}}\supset {\Omega}_i^{\prime }=\left\{\boldsymbol{x}|\boldsymbol{x}\in \mathrm{D},{\phi}_i\left(\boldsymbol{x}\right)\ge -\epsilon \right\} \) (yellow region in Fig. A1b);
-
2)
From the vertexes (which can be found analytically) of \( {\Omega}_i^{\mathrm{ext}} \), generating another rectangle \( {\Omega}_i^{\mathrm{rec}} \) (light blue region in Fig. A1b);
-
3)
Generating the TDF associated with \( {\Omega}_i^{\mathrm{rec}} \);
-
4)
Finding the TDF values in \( {\Omega}_i^{\mathrm{rec}} \) such that −ϵ ≤ ϕi(x) ≤ ϵ, and only storing these values by sparse matrix for subsequent treatment.
The above treatment guarantees that only local values of ϕi(x) are evaluated in the corresponding manipulations, which reduce the computational effort substantially.

A schematical illustration of generating the TDF locally
Rights and permissions
About this article

Cite this article
Liu, C., Zhu, Y., Sun, Z. et al. An efficient moving morphable component (MMC)-based approach for multi-resolution topology optimization. Struct Multidisc Optim 58, 2455–2479 (2018). https://doi.org/10.1007/s00158-018-2114-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00158-018-2114-0