
Abstract
We consider a time-dependent Navier–Stokes problem in dimension two and three provided with mixed boundary conditions. We propose an iterative algorithm and its implementation for resolving this considered problem. The discretization is based on a backward Euler scheme with respect to the time variable and the spectral method with respect to the space variables. We present some numerical experiments which confirm the interest of the discretization.
Similar content being viewed by others

1 Introduction
Due to its physical importance, the Navier–Stokes problem with mixed boundary conditions has been handled in the literature either by finite element discretization [1–8] or by discretization by the spectral and the spectral element method [9–17]. Such mixed boundary conditions are related to a large number of flows, for instance, in the case of a fluid on both sides of a membrane or for the well-known Green–Taylor flow; see [18].
We assume that the domain Ω is a cube where \(\Gamma _{m}\) is one of its faces. We propose a discretization of this problem by the spectral method [19, 20]: The discrete problem relies on high degree polynomial approximation and is constructed by the Galerkin method with numerical integration. Note that the spectral and spectral element discretizations of this formulation were studied in [14] and [12] in the case of conditions on the normal component of velocity and the tangential components of vorticity on the whole boundary. However, different arguments are needed here since the variational formulation is rather different. In particular, we have chosen to work with exactly divergence-free discrete velocities, which seems necessary for the discrete problem to be well posed. The numerical analysis of this discretization was performed in [11].
We overview the Newton-type iterative algorithm that is used to solve the nonlinear discrete problem. Relying once more on the arguments in [8], we check its convergence. We also outline our algorithm for finding an appropriate initial condition in order to initiate Newton’s method. Then, we present the matrices of the linear system derived from the discrete problem.
In [13], the generalized minimal residual method (GMRES) [21] is used to solve the stationary Stokes problem. However, this method is not easy to implement since the matrix is not symmetric and needs a huge number of iterations to converge. In [22], a direct method was proposed permitting to simplify and to improve the resolution. For the nonstationary case, subject of this paper, we will use the global resolution based on the good results shown in [22]. The discretization in time by the implicit Euler method permits us to stabilize the discrete problem. The resulting global matrix is now symmetric and positively defined making the use of the gradient conjugate method possible. As a result, we obtain high accuracy with an optimized number of iterations.
Finally, we present some numerical experiments, which confirm the good convergence of our algorithm and the benefit of this formulation. These numerical experiments are coherent with the theoretical results and the optimality of discretization [11].
An outline of the paper is as follows:
• In Sect. 2, we present the continuous, full discrete problems and the error estimate.
• Sect. 3 is devoted to the description and the convergence of the iterative algorithm used to solve the nonlinear discrete problem.
• In Sect. 4, a detailed description of the linear matrix system is provided. We conclude by presenting some numerical experiments.
2 The continuous and the full discrete problems
We assume that the three-dimensional domain Ω is bounded and simply connected. ∂Ω is its Lipschitz continuous connected boundary. Let \([0; T]\) be an interval in \({\mathbb{R}}\) where T is a positive real. \(\Gamma _{m}\) and Γ are the two connected parts of the partition without overlap of the boundary ∂Ω. “m” denotes the membrane.
\({\mathbf{x}}=(x,y,z)\) and n stands for the unit outward normal vector. We consider the time-dependent Navier–Stokes equations:
f is a density of forces and ν is a positive viscosity. The unknowns are the velocity υ and the pressure P of the fluid.
We introduce the unknown vorticity \(\tau =\operatorname{\mathbf{curl}}\upsilon \) (see [4, 23–26]), and since
problem (1) is equivalent to the following problem:
such that
Let B a separable Banach space. We recall that:
• \((\cdot ,\cdot )\) is the \(L^{2}(\Omega )\) scalar product,
• \(L_{0}^{2}(\Omega )\) is the space of functions in \(L^{2}(\Omega )\) which have a null integral on Ω,
• \(H({\operatorname{div}},\Omega )=\{{\mathbf{u}}\in L^{2}(\Omega )^{3}; \operatorname{div}{\mathbf{u}}\in L^{2}(\Omega )\}\),
• \(H({{\mathbf{curl}}},\Omega )=\{{\mathbf{v}}\in L^{2}(\Omega )^{3}; \operatorname{\mathbf{curl}}{\mathbf{v}}\in L^{2}(\Omega )^{3}\}\),
• \(H_{*}(\operatorname{\mathbf{curl}},\Omega )=\{{\mathbf{v}}\in H({{\mathbf{curl}}},\Omega ); {\mathbf{v}}\times {\mathbf{n}}=0 {\mathrm{on}} \Gamma \}\),
• \(L^{p}(0,T;B)=\{v \text{ measurable on } \mathopen{]}0,T\mathclose{[} \text{ such that } \int _{0}^{T}\|v(\cdot ,t)\|^{p}_{B} dt<\infty \}\),
• \(H^{s}(0,T;B)=\{v \in L^{2}(0,T;B); \partial ^{m} v\in L^{2}(0,T;B); m\leq s\}\).
\(L^{p}(0,T;B)\) is a Banach space equipped with the norm
and \(H^{s}(0,T;B)\) is a Hilbert space equipped with the scalar product
Finally, we define as well \(\mathfrak{L}(B)\) the Banach space of linear and continuous functions on B into \({\mathbb{R}}\) provided with the norm
Then the velocity’s space is defined as
which is provided with the following norm:
We denote by \({\mathbb{X}}(\Omega )^{\prime }\) the dual space of \({\mathbb{X}}(\Omega )\). Then, if \({\mathbf{f}}\in L^{2}(0,T;{\mathbb{X}}(\Omega )^{\prime })\), then problem (2) is equivalent to the following variational formulation. See [11] for the proof.
Find \((\tau (t),\upsilon (t),p(t)) \in L^{2}(\Omega )^{3} \times { \mathbb{X}}(\Omega ) \times L^{2}_{0}(\Omega )\) such that
where \(\langle .,.\rangle \) is the duality product between \({\mathbb{X}}(\Omega )^{\prime }\) and \({\mathbb{X}}(\Omega )\), and \({\mathbf{a}}(.,.;.)\), \({\mathbf{b}}(,.,)\) \({\mathbf{a}}(.,.;.)\) are defined as follows:
While we define the trilinear form \(K(.,.;.)\) as
We have the following inf-sup condition (see [6] or ([27] Chap. I, Cor. 2.4) for its proof):
There exists \(\alpha >0\) such that
See ([28], Chap. III, Theo. 1.1) and ([29], Chap. V) for the proof of existence of solution of problem (5).
Now we make a partition of \([0,T]\) into subintervals \([t_{p-1},t_{p}]\) for \(1\leq p\leq P\) such that \(0=t_{0}< t_{1}<\cdots<t_{P}=T\). Let \(h_{p}=t_{p}-t_{p-1}\) and \(h=(h_{1},h_{2},\ldots,h_{P})\) be the time step such that \(|h|= \max_{1\leq p\leq P}h_{p}\).
Using Euler’s implicit method, for \({\mathbf{f}}\in L^{2}(0,T;{\mathbb{X}}(\Omega )^{\prime })\) and \({\mathbf{u}}^{p}={\mathbf{u}}(.,t_{p})\), we define the time semi-discrete problem:
This system of equations is equivalent to the following variational formulation:
find \((\tau ^{p},\upsilon ^{p})_{1\leq p\leq P} \in (L^{2}(\Omega )^{3} \times {\mathbb{X}}(\Omega ))^{P}\) and \(p^{p}_{1\leq p\leq P}\in (L_{0}^{2}(\Omega ))^{P}\) such that
where
and
Unlike to the two-dimensional case where the vorticity is a scalar function, in the three-dimensional case the vorticity is a vector field. Indeed, the variational spaces are rather different. Moreover, the existence of a solution in the three-dimensional case is only proved when the boundary of the domain Ω is smooth and the viscosity is sufficiently large enough. We refer to [11] for the proof details for the existence of a solution of problem (9)–(10).
Hereinafter, we will focus on the spectral discretization of problem (9)–(10). Thus, we assume that
Let the discrete polynomial spaces
for the approximation of the velocity and
for the approximation of the vorticity. We consider for the approximation of pressure in \(L_{0}^{2}(\Omega )\) the polynomial subspace \({\mathbb{M}}_{N}\) of \(L_{0}^{2}(\Omega ) \cap {\mathbb{P}}_{N-1}(\Omega )\), see [11] for the definition of \({\mathbb{M}}_{N}\).
For a good approximation of the nonlinear term \(K(.,.;.)\), we will make a more precise numerical integration (see [30] and [12]). Let \(M\geq N\). Fixing \(\epsilon _{0} = -1\) and \(\epsilon _{M} = 1\), we make known that the \(M-1\) nodes \(\epsilon _{i}\), \(1 \le i \le M-1\), and the \(M+1\) weights \(\rho _{i}\), \(0 \le i \le M\), of the Gauss–Lobatto quadrature formula such that
Let discrete scalar product be defined on \({\mathbb{P}}_{M}(\Omega )\) as: For continuous functions ϕ and χ on Ω̄,
Then, based on the Galerkin method combined with the Gauss–Lobatto quadrature formula, we find the following discrete problem from problem (9)–(10):
knowing \(\upsilon ^{p-1}\), find \((\tau ^{p}_{N},\upsilon ^{p}_{N},p^{p}_{N})\) in \({\mathbb{X}}_{N}\times {\mathbb{Y}}_{N} \times {\mathbb{M}}_{N}\) such that, for \(1\leq p\leq P\),
where \(\gimel _{N}\) is the Lagrange interpolating operator. The bilinear forms \(\breve{{\mathbf{a}}}_{N}(\cdot ,\cdot ;\cdot )\), \({\mathbf{b}}_{N}(\cdot ,\cdot )\) and \({\mathbf{a}}_{N}(\cdot ,\cdot ;\cdot )\) are defined by
While the discrete nonlinear term \(K_{N}(.,.;)\) is defined as follows:
The compatibility of the two spaces \({\mathbb{M}}_{N}\) and \({\mathbb{X}}_{N}\) is done by the next inf-sup condition proved in ([15], lem. a.6):
There exists \(\gamma >0\) independent of N such that
The well-posedness of problem (15)–(16) is due to the inf-sup condition (19). We refer the reader to the paper [11] for the detailed proof. In the following theorem, we summarize the existence result of the solution.
Theorem 2.1
Assuming that \(({\mathbf{f}},\upsilon _{0})\) is continuous on \(([0,T]\times \bar{\Omega})\times \bar{\Omega}\) and knowing \(\upsilon ^{p-1}_{N}\) at each time step p, problem (15)–(16) has at least a solution \((\tau ^{p}_{N},\upsilon ^{p}_{N},p^{p}_{N})\) in \({\mathbb{Y}}_{N} \times {\mathbb{X}}_{N} \times {\mathbb{M}}_{N}\). Moreover, the couple \((\tau ^{p}_{N},\upsilon ^{p}_{N})\) satisfies the following stability condition:
.
By using the findings in [31], we prove an optimal a priori error estimates for the three unknowns stated in the following theorem (see [11]).
Theorem 1
Assume that the data \({\mathbf{f}}\in L^{2}(0,T;H^{\mu}(\tau ))\); \({\mu}>{\frac{3}{2}}\). There exist an integer \(N^{*}\) and a real number \(h^{*}>0\) such that, for all \(N\geq N^{*}\) and \(| h| \leq h^{*}\), problem (15)–(16) has a unique solution. Moreover, this solution satisfies for all \(1\leq p\leq P\) the following error estimate:
where C is a positive constant which depends only on the data f and \(\upsilon ^{j}\), \(0\leq j\leq {p-1}\).
3 The iterative algorithm and its convergence
We introduce the kernel \(\mathrm{V}_{N} \) of the bilinear form \({\mathbf{b}}_{N}(\cdot ,\cdot )\)
which coincides with the space of divergence-free polynomials in \({\mathbb{X}}_{N}\) (see [15], Lem. 3.2., for the proof).
We also introduce kernel \(\mathrm{W}_{N}\) of the form \({\mathbf{a}}_{N}(\cdot ,\cdot ;\cdot )\)
Then we remark that \((\tau ^{p}_{N},\upsilon ^{p}_{N})\) is a solution of the following problem:
Knowing \(\upsilon ^{p-1}_{N}\), find \((\tau ^{p}_{N},\upsilon ^{p}_{N}) \in \mathrm{W}_{N}\) such that, for all \(1\leq p\leq P\),
Let \({\chi}_{N}={\mathbb{Y}}_{N}\times \mathrm{V}_{N}\), and we denote by \({\mathit{S}}_{N}\) the operator such that \({\mathit{S}}_{N}F^{p}\) is the solution \((\tau ^{p}_{N},\upsilon ^{p}_{N})\) of the problem:
\(\upsilon _{N}^{0}={\gimel _{N}}(\upsilon _{0})\), knowing \(\upsilon ^{p-1}_{N}\), find \((\tau ^{p}_{N},\upsilon ^{p}_{N}) \in \mathrm{W}_{N}\) such that, for any \(1\leq p\leq P\),
We define \({\mathit{G}}_{N}\) the mapping from \({\chi}_{N}\) into a \(({\mathbb{X}}_{N})^{\prime }\) dual space of \({\mathbb{X}}_{N}\) such that:
It is easily verified that problem (24) is equivalent to
We apply the Newton method to problem (26), which leads us to solving the l-iterative equation
where D is the Fréchet derivative. Then, if we multiply equation (27) and use the inf-sup condition (19), we conclude that this equation is equivalently written as follows:
Given an initial condition \(((\tau ^{p}_{N})_{0},(\upsilon ^{p}_{N})_{0})\in {\mathbb{Y}}_{N} \times{\mathbb{X}}_{N}\), we solve the following problem:
knowing \((\upsilon ^{p-1})_{l}\), find \(((\tau ^{p}_{N})_{l},(\upsilon ^{p}_{N})_{l},(p^{p}_{N})_{l})\) in \({\mathbb{X}}_{N}\times {\mathbb{Y}}_{N} \times {\mathbb{M}}_{N}\) such that, for \(1\leq p\leq P\),
For each value of \(l\geq 1\), problem (29) is equivalent to a square linear system. We refer to the papers [31] and ([27], Chap. IV, Thm. 6.3) for the detailed proof of this iterative scheme. For any \(l\geq 1\), problem (29) has a unique solution \(((\tau ^{p}_{N})_{l},(\upsilon ^{p}_{N})_{l},(p^{p}_{N})_{l})\). The convergence of the sequence \(((\tau ^{p}_{N})_{l},(\upsilon ^{p}_{N})_{l},(p^{p}_{N})_{l})_{l}\) is quadratic to the solution \((\tau ^{p}_{N},\upsilon ^{p}_{N},p^{p}_{N})\) of problem (15)–(16). Moreover, for \(1\leq p\leq P\), the sequence \(((\tau ^{p}_{N})_{l},(\upsilon ^{p}_{N})_{l})_{l}\) satisfies
such that the constant \(K<1\). In general, the key point of Newton’s method is to find an initial condition \(((\tau ^{p}_{N})_{0},(\upsilon ^{p}_{N})_{0})\) very close to the solution \((\tau ^{p}_{N},\upsilon ^{p}_{N})\) in such a way that we have
For this, we use the continuation method. For simplicity, we consider the following modified bilinear form:
and the pseudo-pressure \(({\bar{p}}^{p}_{N})_{l}={\frac{h_{p}}{\nu}}(p^{p}_{N})_{l}\). We set \(\zeta ^{p}={\frac{h_{p}}{\nu}}\), then we can equivalently write the problem as follows:
Now, for all \(1\leq p\leq P\), we fix the parameter \((\zeta ^{p}_{m})_{0\leq m\leq M}\) such that
If \(\zeta ^{p}=\zeta ^{p}_{m}\), we consider \(((\tau ^{p}_{N})_{l}(\zeta ^{p}_{m}),(\upsilon ^{p}_{N})_{l}( \zeta ^{p}_{m}),(p^{p}_{N})_{l}(\zeta ^{p}_{m}) )\) to be the solution of problem (32). Then we develop the following algorithm. At each time step, \(1\leq p\leq P\).
(1) Initialization: If \(\zeta ^{p}_{0}=0\), the solution \((\tau ^{p}_{N}(\zeta ^{p}_{0}),\upsilon ^{p}_{N}(\zeta ^{p}_{0}),p^{p}_{N}( \zeta ^{p}_{0}) )\) of its corresponding Stokes problem is equal to zero.
(2) Iterations: We suppose that \(((\tau ^{p}_{N})_{L}(\zeta ^{p}_{m-1}),(\upsilon ^{p}_{N})_{L}( \zeta ^{p}_{m-1}) )\) is known where the integer \(L \geq 1\) is fixed. Then the initial condition \(((\tau ^{p}_{N})_{0}(\zeta ^{p}_{m}),(\upsilon ^{p}_{N})_{0}( \zeta ^{p}_{m}))\) is \(((\tau ^{p}_{N})_{L}(\zeta ^{p}_{m-1}),(\upsilon ^{p}_{N})_{L}( \zeta ^{p}_{m-1}) )\) and problem (32) is solved when \(\zeta ^{p}=\zeta ^{p}_{m}\) for \(1\leq l \leq L\).
The iterations are stopped until \(m=M-1\), and the initial condition \(((\tau ^{p}_{N})_{0},(\upsilon ^{p}_{N})_{0} )\) is taken equal to \(((\tau ^{p}_{N})_{L}(\zeta ^{p}_{M-1}),(\upsilon ^{p}_{N})_{L}( \zeta ^{p}_{M-1}) )\).
For fixed \(1\leq p\leq P\), we consider the mapping φ
such that \(\varphi (\zeta ^{p})= ((\tau ^{p}_{N})_{l}(\zeta ^{p}),(\upsilon ^{p}_{N})_{l}( \zeta ^{p}),(p^{p}_{N})_{l}(\zeta ^{p}) )\). It is easily shown that φ is Lipschitz and continuous on any bounded interval of \({\mathbb{R}}^{+}\), and that
The previous algorithm provides an initial condition which satisfies (31). However, for the numerical experiments, we take low values of M and L, and also smaller values of N than the final one. But, in any case, we have the convergence.
3.1 Resolution algorithm
After the estimation of the initial condition using Newton’s method, we propose the following algorithm for solving problem (15)–(16).
Step 1
Resolution of the linear Stokes problem:
knowing \((\upsilon ^{p-1})_{0}\), find \(((\tau ^{p}_{N})_{0},(\upsilon ^{p}_{N})_{0},(p^{p}_{N})_{0})\) in \({\mathbb{X}}_{N}\times {\mathbb{Y}}_{N} \times {\mathbb{M}}_{N}\) such that
Step 2
If \(((\tau ^{p}_{N})_{l-1},(\upsilon ^{p}_{N})_{l-1},(p^{p}_{N})_{l-1})\) is known, we solve the following problem:
\(\upsilon _{N}^{0}={\gimel _{N}}(\upsilon _{0})\), knowing \((\upsilon ^{p-1}_{N})_{l}\), find \(((\tau ^{p}_{N})_{l},(\upsilon ^{p}_{N})_{l},(p^{p}_{N})_{l})\) in \({\mathbb{X}}_{N}\times {\mathbb{Y}}_{N} \times {\mathbb{M}}_{N}\) such that
We stop the calculus under the following condition:
ϵ is a small positive real number.
4 Numerical experiments
In this section, we perform several numerical tests. The goal is to highlight the performance of the spectral method in two and three dimensions of space. In two dimensions, the vorticity is a scalar and \(\upsilon \times {\mathbf{n}}\) means the tangential component of υ, see [15] for the numerical analysis of the two-dimensional case. For handling some realistic tests, we consider the following nonhomogeneous boundary conditions given by
Then the first equation of system (10) is modified as follows:
The GMRES method can be used for the resolution of a nonsymmetric linear system deduced from discrete problem (15)–(16). Nevertheless, this method is complex to implement and requires a high number of iterations to converge since the condition number of the matrix is high. Thus, we adopt the method in [22] which proposes the modification of the matrix linear system by adding the term \(\mathit{div}-\mathit{div}\). We obtain a symmetric system with a positive defined matrix allowing the use of the preconditioned gradient conjugate method for its resolution. Accordingly, we obtained a small number of iterations with a very good accuracy.
4.1 Time convergence
We consider the square \(\Omega =\mathopen{]}-1, 1\mathclose{[}^{2}\), \(\Gamma _{m}=\mathopen{]}-1, 1[\times \{1\}\). In order to highlight the time and space convergence, we take the following exact solution \(\tau =\operatorname{\mathbf{curl}} \upsilon \), \(\upsilon =(\upsilon _{1}, \upsilon _{2})\), and p:
Let \(\upsilon _{0}=\upsilon ({\mathbf{x}},0)=(0,0)\), \(T=1\), \(N=30\), and \(h \in \{0.1,0.001,0.0001\}\). We fix the viscosity \(\nu =5\cdot 10^{-2}\) and the tolerance \(\epsilon =10^{-10}\).
Figure 1 deals with time convergence curves for the solution defined in (36). We remark that the time convergence order is almost equal to 1, which confirms the result in ([11], Sect. 5, Th. 2).

Time convergence
4.2 Spectral two-dimensional convergence
We fix the time step \(h=0.0001\) and N varying from 5 to 35.
We present in Fig. 2 the errors between the numerical solutions and the exact solutions defined in (36). The curves show the convergence of the velocity in \(H^{1}\)-norm, and in the \(L^{2}\)-norm for the vorticity and pressure. We observe that the errors tend to 0 when N increases, which confirms the result in ([11], Sect. 5, Th.2).

Two-dimensional convergence
Figure 3 relates from top to bottom and from left to right the discrete vorticity, the two components of the discrete velocity, and the discrete pressure for the data

Two-dimensional discrete solution for the data defined in (37)
4.3 Spectral three-dimensional convergence
Herein, we consider the cube \(\Omega =\mathopen{]}-1, 1\mathclose{[}^{3} \Gamma _{m}=\mathopen{]}-1, 1\mathclose{[}^{2}\times \{1\}\). We fix the viscosity \(\nu =5\cdot 10^{-2}\) and the tolerance \(\epsilon =10^{-10}\). We fix also the time step \(h=0.0001\) and N varying from 5 to 18.
We consider a given solution constructed thanks to the formulas \(\upsilon = \operatorname{\mathbf{curl}}\varphi \) and \(\tau = \operatorname{\mathbf{curl}}\upsilon \), where the stream function φ and the pressure are defined by
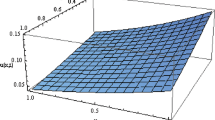
Figure 4 shows the convergence curves of the errors on the vorticity, the velocity, and the pressure in semi-logarithmic scales for N varying from 5 to 18, for a less regular solution defined in (38).

Three-dimensional convergence
Figure 5 presents, from left to right and top to bottom, the curves of three-dimensional isovalues of the three components of the velocity and the vorticity and of the pressure, which correspond to the data of the homogeneous boundary conditions
obtained with \(N = 18\).

The three-dimensional discrete solution for the data defined in (39)
Availability of data and materials
Not applicable.
References
Bègue, C., Conca, C., Murat, F., Pironneau, O.: Les équations de Stokes et de Navier–Stokes avec des conditions aux limites sur la pression. In: Brezis, H., Lions, J.-L. (eds.) Nonlinear Partial Differential Equations and Their Applications. Collège de France Seminar, vol. IX. pp. 179–264. Longman, Harlow (1988)
Conca, C., Parès, C., Pironneau, O., Thiriet, M.: Navier Stokes equations with imposed pressure and velocity luxes. Int. J. Numer. Methods Fluids 20, 267–287 (1995)
Girault, V.: Incompressible finite element methods for Navier–Stokes equations with nonstandard boundary conditions in \(\mathbb{R}^{3}\). Math. Compet. 51, 55–74 (1988)
Salmon, S.: Développement numérique de la formulation tourbillon–vitesse–pression pour le problème de Stokes. PhD thesis, Université Pierre et Marie Curie, Paris, France (1999)
Amara, M.D., Chacon-Vera, E., Trujillo, D.: Stabilized finite element method for the Navier–Stokes equations, with non standard boundary conditions. J. Sci. Comput. 18, 4–9 (2005)
Bernardi, C., Hecht, F., Verfurth, R.: Finite element discretization of the three-dimensional Navier–Stokes equations with mixed boundary conditions. Math. Model. Numer. Anal. 3, 1185–1201 (2009)
Bernardi, C., Sayah, T.: A posteriori error analysis of the time dependent Stokes equations with mixed boundary conditions. IMA J. Numer. Anal. 35, 179–198 (2015)
Bernardi, C., Sayah, T.: A posteriori error analysis of the time dependent Navier–Stokes equations with mixed boundary conditions. SeMA J. 69, 1–23 (1991)
Abdelwahed, M., Chorfi, N.: Spectral discretization of the time dependent vorticity velocity pressure formulation of the Stokes problem. Math. Methods Appl. Sci., 1–18 (2020)
Abdelwahed, M., Chorfi, N.: Spectral discretization of the time dependent vorticity velocity pressure formulation of the Navier–Stokes equations. Bound. Value Probl. 152, 1–15 (2020)
Abdelwahed, M., Chorfi, N.: Spectral discretization of the time dependent Navier–Stokes problem with mixed boundary conditions. Adv. Nonlinear Anal. 11, 1447–14655 (2022)
Amoura, K., Azaïez, M., Bernardi, C., Chorfi, N., Saadi, S.: Spectral element discretization of the vorticity, velocity and pressure formulation of the Navier–Stokes problem. Calcolo 44, 165–188 (2007)
Bernardi, C., Chorfi, N.: Spectral discretization of the vorticity, velocity and pressure formulation of the Stokes problem. SIAM J. Numer. Anal. 44, 826–850 (2006)
Azaïez, M., Bernardi, C., Chorfi, N.: Spectral discretization of the vorticity, velocity and pressure formulation of the Navier Stokes equations. Numer. Math. 104, 1–26 (2006)
Amoura, K., Bernardi, C., Chorfi, N., Saadi, S.: Spectral discretization of the Stokes problem with mixed boundary conditions. Prog. Comput. Phys. 2, 42–61 (2012)
Daikh, Y., Yakoubi, D.: Spectral discretization of the Navier–Stokes problem with mixed boundary conditions. Applied Numerical Mathematics. 118, 33–49 (2017)
Bousbiat, C., Daikh, Y., Maarouf, S.: Spectral discretization of the time-dependent Stokes problem with mixed boundary conditions. Math Meth Appl Sci., 1–28 (2021)
Peyret, R., Taylor, T.D.: Computational Methods for Fluid Flow. Springer, Berlin (1983)
Bernardi, C., Maday, Y.: Spectral method. In: Ciarlet, P.G., Lions, J.-L. (eds.) Handbook of Numerical Analysis. North-Holland, Amsterdam (1997)
Bernardi, C., Maday, Y., Rapetti, F.: Discrétisations Variationnelles de Problèmes aux Limites Elliptiques. Collection Mathématiques et Applications. Springer, Berlin (2004)
Walker, H.F.: Implementation of the GMRES method using Householder transformation. SIAM J. Sci. Statist. Comput. 9, 152–163 (1988)
Ouertani, H., Alsaeed, D.H., Al-Bait, H., Chorfi, N.: Enhanced algorithms for implementing the spectral discretization of the vorticity-velocity-pressure formulation of stokes problem. Math. Methods Appl. Sci. 42 (2019)
Dubois, F.: Vorticity–velocity–pressure formulation for the Stokes problem. Math. Methods Appl. Sci. 25, 1091–1119 (2002)
Dubois, F., Salaün, M., Salmon, S.: Vorticity–velocity–pressure and stream function-vorticity formulations for the Stokes problem. J. Math. Pures Appl. 82, 1395–1451 (2003)
Amara, M., Capatina-Papaghiuc, D., Chacon-Vera, E., Trujillo, D.: Vorticity–velocity–pressure formulation for Navier–Stokes equations. Comput. Vis. Sci. 6, 47–52 (2004)
Amara, M.D., Capatina-Papaghiuc, D., Trujillo, D.: Vorticity–velocity–pressure formulation for the Stokes problem. Math. Comput. 73, 1673–1697 (2004)
Girault, V., Raviart, P.-A.: Finite Element Methods for Navier Stokes Equations, Theory and Algorithms. Springer, Berlin (1986)
Temam, R.: Navier Stokes Equations. Theory and Numerical Analysis. Studies in Mathematics and Its Applications, vol. 2. North–Holland, Amsterdam (1977)
Girault, V., Raviart, P.-A.: Finite Element Approximation of the Navier Stokes Equations. Lecture Notes in Mathematics, vol. 749. Springer, Berlin (1979)
Maday, Y., Ronquist, E.M.: Optimal error analysis of spectral methods with emphasis on non-constant coefficients and deformed geometries. Comp. Meth. Appl Mech. Engrg. 80, 91–115 (1990)
Brezzi, F., Rappaz, J., Raviart, P.-A.: Finite dimensional approximation of nonlinear problems. Part I: branches of nonsingular solutions. Numer. Math. 36, 1–25 (1980)
Acknowledgements
Researchers Supporting Project number (RSP-2021/153), King Saud University, Riyadh, Saudi Arabia.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Abdelwahed, M., Chorfi, N., Mezghani, N. et al. An algorithm for solving the Navier–Stokes problem with mixed boundary conditions. Bound Value Probl 2022, 94 (2022). https://doi.org/10.1186/s13661-022-01678-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-022-01678-y