
Abstract
Toolpath generation (TPG) for multi-axis milling machines using vector fields (VF) and vector field analysis (VFA) is becoming increasingly popular in the manufacturing industry. Therefore, the paper presents a survey of algorithms and methods of TPG based on the vector fields of preferred directions (VFPD) for five-axis CNC machining. Two hundred relevant citations in top manufacturing and optimization journals during 1995–2021 have been presented and discussed. Additional 79 references in Appendices are related to a classification of five-axis machines, the theory and recent advances in the area of the vector and tensor fields.

















Similar content being viewed by others

Data availability
Not applicable.
Code availability
Not applicable.
References
Marshall S, Griffiths J (1994) A survey of cutter path construction techniques for milling machines. Int J Prod Res 32(12):2861–2877. https://doi.org/10.1080/00207549408957105
Loney GC, Ozsoy TM (1987) NC machining of free form surfaces. Comput Aided Des 19(2):85–90. https://doi.org/10.1016/S0010-4485(87)80050-7
Jun CS, Cha K, Lee YS (2003) Optimizing tool orientations for 5-axis machining by configuration-space search method. Comput Aided Des 35(6):549–566. https://doi.org/10.1016/S0010-4485(02)00077-5
Griffiths J (1985) Table-driven algorithms for generating space-filling curves. Comput Aided Des 17(1):37–41. https://doi.org/10.1016/0010-4485(85)90009-0
Griffiths J (1994) Toolpath based on hilbert’s curve. Comput Aided Des 26(11):839–844. https://doi.org/10.1016/0010-4485(94)90098-1
Dragomatz D, Mann S (1997) A classified bibliography of literature on NC milling path generation. Comput Aided Des 29(3):239–247. https://doi.org/10.1016/S0010-4485(96)00060-7
Makhanov S, Anotaipaiboon W (2007) Advanced numerical methods to optimize cutting operations of five-axis milling machines. Springer
Tang T, Bohez E, Koomsap P (2007) The sweep plane algorithm for global collision detection with workpiece geometry update for five-axis NC machining. Comput Aided Des 39(11):1012–1024. https://doi.org/10.1016/j.cad.2007.06.004
Tang T (2014) Algorithms for collision detection and avoidance for five-axis NC machining: a state of the art review. Comput Aided Des 51:1–17. https://doi.org/10.1016/j.cad.2014.02.001
Bohez EL, Minh NTH, Kiatsrithanakorn B, Natasukon P, Ruei-Yun H, Son LT (2003) The stencil buffer sweep plane algorithm for 5-axis CNC tool path verification. Comput Aided Des 35(12):1129–1142. https://doi.org/10.1016/S0010-4485(02)00209-9
Ding X, Fuh J, Lee K (2001) Interference detection for 3-axis mold machining. Comput Aided Des 33(8):561–569. https://doi.org/10.1016/S0010-4485(00)00097-X
Rao A, Sarma R (2000) On local gouging in five-axis sculptured surface machining using flat-end tools. Comput Aided Des 32(7):409–420. https://doi.org/10.1016/S0010-4485(99)00105-0
Yoon JH, Pottmann H, Lee YS (2003) Locally optimal cutting positions for 5-axis sculptured surface machining. Comput Aided Des 35(1):69–81. https://doi.org/10.1016/S0010-4485(01)00176-2
Chen T, Ye P, Wang J (2005) Local interference detection and avoidance in five-axis NC machining of sculptured surfaces. Int J Adv Manuf Technol 25(3):343–349. https://doi.org/10.1007/s00170-003-1921-6
Cai Y, Xi G, Wang S (2003) Efficient tool path planning for five-axis surface machining with a drum-taper cutter. Int J Prod Res 41(15):3631–3644. https://doi.org/10.1080/0020754031000138312
Lee YS, Chang TC (1995) 2-phase approach to global tool interference avoidance in 5-axis machining. Comput Aided Des 27(10):715–729. https://doi.org/10.1016/0010-4485(94)00021-5
Choi BK, Kim DH, Jerard RB (1997) C-space approach to tool-path generation for die and mould machining. Comput Aided Des 29(9):657–669. https://doi.org/10.1016/S0010-4485(97)00012-2
Morishige K, Kase K, Takeuchi Y (1997) Collision-free tool path generation using 2-dimensional C-space for 5-axis control machining. Int J Adv Manuf Technol 13(6):393–400. https://doi.org/10.1007/BF01179033
Lee YS (1997) Admissible tool orientation control of gouging avoidance for 5-axis complex surface machining. Comput Aided Des 29(7):507–521. https://doi.org/10.1016/S0010-4485(97)00002-X
Elber G, Cohen E (1999) A unified approach to verification in 5-axis freeform milling environments. Comput Aided Des 31(13):795–804. https://doi.org/10.1016/S0010-4485(99)00047-0
Zhiwei L, Hongyao S, Wenfeng G, Jianzhong F (2012) Approximate tool posture collision-free area generation for five-axis CNC finishing process using admissible area interpolation. Int J Adv Manuf Technol 62(9):1191–1203. https://doi.org/10.1007/s00170-011-3851-z
Ho S, Sarma S, Adachi Y (2001) Real-time interference analysis between a tool and an environment. Comput Aided Des 33(13):935–947. https://doi.org/10.1016/S0010-4485(00)00117-2
Balasubramaniam M, Laxmiprasad P, Sarma S, Shaikh Z (2000) Generating 5-axis nc roughing paths directly from a tessellated representation. Comput Aided Des 32(4):261–277. https://doi.org/10.1016/S0010-4485(99)00103-7
Balasubramaniam M, Ho S, Sarma S, Adachi Y (2002) Generation of collision-free 5-axis tool paths using a haptic surface. CAD Computer Aided Design 34(4):267–279. https://doi.org/10.1016/S0010-4485(01)00057-4
Balasubramaniam M, Sarma SE, Marciniak K (2003) Collision-free finishing toolpaths from visibility data. Comput Aided Des 35(4):359–374. https://doi.org/10.1016/S0010-4485(02)00057-X
Ding S, Mannan M, Poo A (2004) Oriented bounding box and octree based global interference detection in 5-axis machining of free-form surfaces. Comput Aided Des 36(13):1281–1294. https://doi.org/10.1016/S0010-4485(03)00109-X
You CF, Chu CH (1997) Tool-path verification in five-axis machining of sculptured surfaces. Int J Adv Manuf Technol 13(4):248–255. https://doi.org/10.1007/BF01179606
Jensen C, Red W, Pi J (2002) Tool selection for five-axis curvature matched machining. Comput Aided Des 34(3):251–266. https://doi.org/10.1016/S0010-4485(01)00086-0
Zhang W, Zhang YF, Ge QJ (2005) Interference-free tool path generation for 5-axis sculptured surface machining using rational Bézier motions of a flat-end cutter. Int J Prod Res 43(19):4103–4124. https://doi.org/10.1080/00207540500168188
Kiswanto G, Lauwers B, Kruth JP (2007) Gouging elimination through tool lifting in tool path generation for five-axis milling based on faceted models. Int J Adv Manuf Technol 32(3):293–309. https://doi.org/10.1007/s00170-005-0338-9
Gray P, Bedi S, Ismail F (2003) Rolling ball method for 5-axis surface machining. Comput Aided Des 35(4):347–357. https://doi.org/10.1016/S0010-4485(02)00056-8
Gray PJ, Ismail F, Bedi S (2004) Graphics-assisted rolling ball method for 5-axis surface machining. Comput Aided Des 36(7):653–663. https://doi.org/10.1016/S0010-4485(03)00141-6
Gray PJ, Bedi S, Ismail F (2005) Arc-intersect method for 5-axis tool positioning. Comput Aided Des 37(7):663–674. https://doi.org/10.1016/j.cad.2004.08.006
Hosseinkhani Y, Akbari J, Vafaeesefat A (2007) Penetration-elimination method for five-axis CNC machining of sculptured surfaces. Int J Mach Tool Manuf 47(10):1625–1635. https://doi.org/10.1016/j.ijmachtools.2006.11.002
Ilushin O, Elber G, Halperin D, Wein R (2004) Precise global collision detection in multi-axis NC-machining. Comput-Aided Des App 1(1–4):233–242. https://doi.org/10.1080/16864360.2004.10738263
Ron W, Oleg I, Gershon E, Dan H (2005) Continuous path verification in multi-axis NC-machining. Internat J Comput Geom Appl 15(04):351–377. https://doi.org/10.1142/S0218195905001749
Wang QH, Li JR, Zhou RR (2006) Graphics-assisted approach to rapid collision detection for multi-axis machining. Int J Adv Manuf Technol 30(9):853–863. https://doi.org/10.1007/s00170-005-0127-5
Lasemi A, Xue D, Gu P (2010) Recent development in CNC machining of freeform surfaces: a state-of-the-art review. Comput Aided Des 42(7):641–654. https://doi.org/10.1016/j.cad.2010.04.002
Warkentin A, Hoskins P, Ismail F, Bedi S (2000) Computer aided 5-axis machining. In: Leondes C (ed) Computer aided design, engineering and manufacturing: System techniques and applications. CRC Press
Choi B, Jerard R (1998) Sculptured surface machining theory and applications. Kluwer Academic Publishers
Kim BH, Choi BK (2002) Machining efficiency comparison direction-parallel tool path with contour-parallel tool path. Comput Aided Des 34(2):89–95
Cox J, Takezaki Y, Ferguson H, Kohkonen K, Mulkay EL (1994) Space-filling curves in tool-path applications. Comput Aided Des 26(3):215–224. https://doi.org/10.1016/0010-4485(94)90044-2. Special Issue: NC machining and cutter-path generation
Anotaipaiboon W, Makhanov S (2005) Tool path generation for five-axis NC machining using adaptive space-filling curves. Int J Prod Res 43(8):1643–1665
Pessoles X, Tournier C (2009) Automatic polishing process of plastic injection molds on a 5-axis milling center. J Mater Process Technol 209(7):3665–3673. https://doi.org/10.1016/j.jmatprotec.2008.08.034
Makhanov S (2009) Space-filling curves in adaptive curvilinear coordinates for computer numerically controlled five-axis machining. Math Comput Simul 79(8):2385–2402. Nonstandard Applications of Computer Algebra Applied Scientific Computing VI: Numerical Grid Generation, Approximation and Visualization Modelling and Managing Financial Risk
Moodleah S, Makhanov S (2015) 5-axis machining using a curvilinear tool path aligned with the direction of the maximum removal rate. Int J Adv Manuf Technol 80(1):65–90
Sun Y, Xu J, Jin C, Guo D (2016) Smooth tool path generation for 5-axis machining of triangular mesh surface with nonzero genus. Comput Aided Des 79:60–74
Makhanov S (2010) Adaptable geometric patterns for five-axis machining: a survey. Int J Adv Manuf Technol 47(9):1167–1208. https://doi.org/10.1007/s00170-009-2244-z
Makhanov SS, Sonthipaumpoon K, Vannakrarojn S (1998) Variational gridding algorithms to optimize a tool-path of a five-axis milling machine. In: 1998 IEEE Asia-Pacific Conference on Circuits and Systems. Microelectronics and Integrating Systems. Proceedings, pp 515–518
Makhanov S (1999) An application of variational grid generation techniques to the tool-path optimization of industrial milling robots. Comput Math Math Phys 39(9):1524–1535
Makhanov S, Ivanenko S (2003) Grid generation as applied to optimize cutting operations of the five-axis milling machine. Appl Numer Math 46(3):331–351. https://doi.org/10.1016/S0168-9274(03)00039-4
Bieterman MB, Sandstrom DR (2003) A curvilinear tool-path method for pocket machining. J Manuf Sci Eng 125(4):709–715
Sun YW, Guo DM, Jia ZY (2006) Spiral cutting operation strategy for machining of sculptured surfaces by conformal map approach. J Mater Process Technol 180(1):74–82
Zou Q, Zhao J (2013) Iso-parametric tool-path planning for point clouds. Comput Aided Des 45(11):1459–1468. https://doi.org/10.1016/j.cad.2013.07.001
Zhao J, Zou Q, Li L, Zhou B (2015) Tool path planning based on conformal parameterization for meshes. Chin J Aeronaut 28(5):1555–1563. https://doi.org/10.1016/j.cja.2015.06.005
Moodleah S, Bohez E, Makhanov S (2016) Five-axis machining of stl surfaces by adaptive curvilinear toolpaths. Int J Prod Res 54(24):7296–7329
Zhou B, Zhao J, Li L (2015) Cnc double spiral tool-path generation based on parametric surface mapping. Comput Aided Des 67–68:87–106. https://doi.org/10.1016/j.cad.2015.06.005
Kuo CL, Chu CH, Li Y, Li X, Gao L (2015) Electromagnetism-like algorithms for optimized tool path planning in 5-axis flank machining. Comput Ind Eng 84:70–78. https://doi.org/10.1016/j.cie.2014.11.023
Ratiu M (2016) Short literature review on the optimization of the five-axis CNC machines. Ann Univ Oradea 2:796–808
Narooei KD, Ramli R (2014) New approaches in tool path optimization of CNC machining: a review. Appl Mech Mater 663:657–661
Harik RF, Gong H, Bernard A (2013) 5-axis flank milling: a state-of-the-art review. Comput Aided Des 45(3):796–808. https://doi.org/10.1016/j.cad.2012.08.004
Bharat S, Natraj O (2014) Application of artificial intelligence methods of tool path optimization in CNC machines. Int J Eng Res Technol 6(14):746–754
Zebala W, Plaza M (2014) Comparative study of 3- and 5-axis CNC centers for free-form machining of difficult-to-cut material. Int J Prod Econ 158:345–358. https://doi.org/10.1016/j.ijpe.2014.08.006
Xu XJ, Bradley C, Zhang YF, Loh HT, Wong YS (2002) Tool-path generation for five-axis machining of free-form surfaces based on accessibility analysis. Int J Prod Res 40(14):3253–3274. https://doi.org/10.1080/00207540210150643
Zhang Y, Xu X, Liu Y (2011) Numerical control machining simulation: a comprehensive survey. Int J Comput Integr Manuf 24(7):593–609. https://doi.org/10.1080/0951192X.2011.566283
Fleisig R, Spence A (2005) Techniques for accelerating B-rep based parallel machining simulation. Comput Aided Des 37(12):1229–1240. https://doi.org/10.1016/j.cad.2004.11.008
Yip-Hoi D, Huang X (2004) Cutter/Workpiece engagement feature extraction from solid models for end milling. J Manuf Sci Eng 128(1):249–260. https://doi.org/10.1115/1.1948395
Saturley PV, Spence AD (2000) Integration of milling process simulation with on-line monitoring and control. Int J Adv Manuf Technol 16(2):92–99. https://doi.org/10.1007/s001700050013
Spence A, Abrari F, Elbestawi M (2000) Integrated solid modeller based solutions for machining. Comput Aided Des 32(8):553–568. https://doi.org/10.1016/S0010-4485(00)00042-7
El-Mounayri H, Kishawy H, Tandon V (2002) Optimized CNC end-milling: a practical approach. Int J Comput Integr Manuf 15(5):453–470. https://doi.org/10.1080/09511920110118803
El-Mounayri H, Deng H (2010) A generic and innovative approach for integrated simulation and optimisation of end milling using solid modelling and neural network. Int J Comput Integr Manuf 23(1):40–60. https://doi.org/10.1080/09511920903225268
Wein R, Ilushin O, Elber G, Halperin D (2005) Continuous path verification in multi-axis NC-machining. Internat J Comput Geom Appl 15(04):351–377. https://doi.org/10.1142/S0218195905001749
Lee SK, Ko SL (2002) Development of simulation system for machining process using enhanced Z map model. J Mater Process Technol 130–131:608–617. https://doi.org/10.1016/S0924-0136(02)00761-6
Kim G, Cho P, Chu C (2000) Cutting force prediction of sculptured surface ball-end milling using Z-map. Int J Mach Tool Manuf 40(2):277–291. https://doi.org/10.1016/S0890-6955(99)00040-1
Kim G, Kim B, Chu C (2003) Estimation of cutter deflection and form error in ball-end milling processes. Int J Mach Tool Manuf 43(9):917–924. https://doi.org/10.1016/S0890-6955(03)00056-7
Jung YH, Kim JS, Hwang SM (2001) Chip load prediction in ball-end milling. J Mater Process Technol 111(1):250–255. https://doi.org/10.1016/S0924-0136(01)00528-3
Ko JH, Yun WS, Cho DW, Ehmann KF (2002) Development of a virtual machining system, Part 1: Approximation of the size effect for cutting force prediction. Int J Mach Tool Manuf 42(15):1595–1605. https://doi.org/10.1016/S0890-6955(02)00137-2
Park JW, Shin YH, Chung YC (2005) Hybrid cutting simulation via discrete vector model. Comput Aided Des 37(4):419–430. https://doi.org/10.1016/j.cad.2004.07.003
Dyllong E, Grimm C (2008) A reliable extended octree representation of CSG objects with an adaptive subdivision depth. In: Wyrzykowski R, Dongarra J, Karczewski K, Wasniewski J (eds) Parallel Processing and Applied Mathematics. Springer, Berlin Heidelberg, Berlin, Heidelberg, pp 1341–1350
Karunakaran KP, Shringi R (2007) Octree-to-brep conversion for volumetric NC simulation. Int J Adv Manuf Technol 32(1):116–131. https://doi.org/10.1007/s00170-005-0310-8
Karunakaran K, Shringi R (2008) A solid model-based off-line adaptive controller for feed rate scheduling for milling process. J Mater Process Technol 204(1):384–396. https://doi.org/10.1016/j.jmatprotec.2007.11.092
Karunakaran KP, Shringi R, Ramamurthi D, Hariharan C (2010) Octree-based NC simulation system for optimization of feed rate in milling using instantaneous force model. Int J Adv Manuf Technol 46(5):465–490. https://doi.org/10.1007/s00170-009-2107-7
Zhang W, Peng X, Leu MC, Zhang W (2007) A novel contour generation algorithm for surface reconstruction from dexel data. J Comput Inf Sci Eng 7(3):203–210. https://doi.org/10.1115/1.2752817
Blasquez I, Poiraudeau JF (2004) Undo facilities for the extended z-buffer in NC machining simulation. Comput Ind 53(2):193–204. https://doi.org/10.1016/S0166-3615(03)00147-7
Fussell BK, Jerard RB, Hemmett JG (2000) Robust feedrate selection for 3-Axis NC machining using discrete models. J Manuf Sci Eng 123(2):214–224. https://doi.org/10.1115/1.1365398
Fussell B, Jerard R, Hemmett J (2003) Modeling of cutting geometry and forces for 5-axis sculptured surface machining. Comput Aided Des 35(4):333–346. https://doi.org/10.1016/S0010-4485(02)00055-6
Cheng K, Pan PY, Harrison DK (2001) Web-based design and manufacturing support systems: Implementation perspectives. Int J Comput Integr Manuf 14(1):14–27. https://doi.org/10.1080/09511920150214875
Luo YB, Ong SK, Chen DF, Nee AYC (2002) An internet-enabled image- and model-based virtual machining system. Int J Prod Res 40(10):2269–2288. https://doi.org/10.1080/00207540210125498
Yeung CH, Altintas Y, Erkorkmaz K (2006) Virtual CNC system. Part I. System architecture. Int J Mach Tools Manuf 46(10):1107–1123. https://doi.org/10.1016/j.ijmachtools.2005.08.002
Bouhadja K, Bey M (2015) Survey on simulation methods in multi-axis machining. In: Ao YSI, Gelman L (eds) Gi-Chul. Transactions on Engineering Technologies, Springer, pp 367–382
Gao S, Zhou H, Hu P, Chen J, Yang J, Li N (2020) A general framework of workpiece setup optimization for the five-axis machining. Int J Mach Tool Manuf 149:103508. https://doi.org/10.1016/j.ijmachtools.2019.103508
Anotaipaiboon W, Makhanov S, Bohez E (2006) Optimal setup for five-axis machining. Int J Mach Tool Manuf 46(9):964–977. https://doi.org/10.1016/j.ijmachtools.2005.07.046
Sun Y, Sun S, Xu J, Guo D (2017) A unified method of generating tool path based on multiple vector fields for CNC machining of compound nurbs surfaces. Comput Aided Des 91:14–26
Vaxman A, Campen M, Diamanti O, Panozzo D, Bommes D, Hildebrandt K, Ben-Chen M (2016) Directional field synthesis, design, and processing. Comput Graph Forum, Wiley Online Library 35:545–572
Pham B (1992) Offset curves and surfaces: a brief survey. Comput Aided Des 24(4):223–229
Maekawa T (1999) An overview of offset curves and surfaces. Comput Aided Des 31(3):165–173
Kim K, Jeong J (1995) Tool path generation for machining free-form pockets with islands. Comput Ind Eng 28(2):399–407
Suh SH, Shin YS (1996) Neural network modeling for tool path planning of the rough cut in complex pocket milling. J Manuf Syst 15(5):295–304
Korosec M, Kopac J (2001) Neural network based selection of optimal tool path in free form surface machining. J Autom Mob Robot Intell Syst 1(4):41–50
Arkin EM, Fekete SP, Mitchell JS (2000) Approximation algorithms for lawn mowing and milling. Comput Geom 17(1):25–50
Park SC, Chung YC, Choi BK (2003) Contour-parallel offset machining without tool-retractions. Comput Aided Des 35(9):841–849
Kim DS (1998) Polygon offsetting using a Voronoi diagram and two stacks. Comput Aided Des 30(14):1069–1076
Jeong J, Kim K (1998) Tool path generation for machining free-form pockets using Voronoi diagrams. Int J Adv Manuf Technol 14:876–881
Jeong J, Kim K (1999) Generation of tool paths for machining free-form pockets with islands using distance maps. Int J Adv Manuf Technol 15(5):311–316
Choi BK, Kim BH (1997) Die-cavity pocketing via cutting simulation. Comput Aided Des 29(12):837–846
Liu XZ, Yong JH, Zheng GQ, Sun JG (2007) An offset algorithm for polyline curves. Comput Ind 58(3):240–254
Park S, Choi B (2001) Uncut free pocketing tool-paths generation using pair-wise offset algorithm. Comput Aided Des 33(10):739–746
Park S, Chung Y (2002) Offset tool-path linking for pocket machining. Comput Aided Des 34(4):299–308
Kim HC (2007) Tool path modification for optimized pocket milling. Int J Prod Res 45(24):5715–5729
Choy H, Chan K (2003) A corner-looping based tool path for pocket milling. Comput Aided Des 35(2):155–166
Pateloup V, Duc E, Ray P (2004) Corner optimization for pocket machining. Int J Mach Tool Manuf 44(12):1343–1353
Yao Z, Gupta SK (2004) Cutter path generation for 2.5D milling by combining multiple different cutter path patterns. Int J Prod Res 42(11):2141–2161
Choi SH, Cheung HH (2006) A topological hierarchy-based approach to toolpath planning for multi-material layered manufacturing. Comput Aided Des 38(2):143–156
Stori J, Wright P (2000) Constant engagement tool path generation for convex geometries. J Manuf Syst 19(3):172–184
Uddin MS, Ibaraki S, Matsubara A, Nishida S, Kakino Y (2006) Constant engagement tool path generation to enhance machining accuracy in end milling. JSME Int J Ser C Mech Syst Mach Elements Manuf 49(1):43–49
Heo EY, Kim DW, Lee JY, Lee CS, Chen FF (2011) High speed pocket milling planning by feature-based machining area partitioning. Robot Comput-Integr Manuf 27(4):706–713
Zou Q, Zhang J, Deng B, Zhao J (2014) Iso-level tool path planning for free-form surfaces. Comput Aided Des 53:117–125
Jousselin B, Quinsat Y, Tournier C (2019) A 5-axis pocket roughing strategy reducing the remaining material volume. Procedia CIRP 82:368–373. 17th CIRP Conference on Modelling of Machining Operations (17th CIRP CMMO)
Gaur M, Law M (2019) Pocket milling strategies using combined-mode and feed-direction-dependent stability criteria. Procedia CIRP 82:261–266. https://doi.org/10.1016/j.procir.2019.04.005. 17th CIRP Conference on Modelling of Machining Operations (17th CIRP CMMO)
Huang N, Lynn R, Kurfess T (2017) Aggressive spiral toolpaths for pocket machining based on medial axis transformation. J Manuf Sci Eng 139(5)
Liu Z, Li X, Song Y, Yi B (2017) Generating spiral tool paths based on spiral enter assistant line. Int J Adv Manuf Technol 92(1):869–879
Huang N, Jin Y, Lu Y, Yi B, Li X, Wu S (2020) Spiral toolpath generation method for pocket machining. Comput Ind Eng 139
Kuipers T, Doubrovski EL, Wu J, Wang CC (2020) A framework for adaptive width control of dense contour-parallel toolpaths in fused deposition modeling. Comput Aided Des 128. https://doi.org/10.1016/j.cad.2020.102907
Makhanov S, Batanov D, Bohez E, Sonthipaumpoon K, Anotaipaiboon W, Tabucanon M (2002) On the tool-path optimization of a milling robot. Comput Ind Eng 43(3):455–472
Abrahamsen M (2019) Spiral tool paths for high-speed machining of 2d pockets with or without islands. J Comput Des Eng 6(1):105–117
Zhou B, Zhao J, Li L, Xia R (2016) A smooth double spiral tool path generation and linking method for high-speed machining of multiply-connected pockets. Precis Eng 46:48–64
Held M, de Lorenzo S (2018) On the generation of spiral-like paths within planar shapes. J Comput Des Eng 5(3):348–357
Xu J, Ji Y, Sun Y, Lee YS (2018) Spiral tool path generation method on mesh surfaces guided by radial curves. J Manuf Sci Eng 140(7)
Banerjee A, Feng HY, Bordatchev EV (2012) Process planning for floor machining of 2D pockets based on a morphed spiral tool path pattern. Comput Ind Eng 63(4):971–979
Xu J, Sun Y, Zhang X (2013) A mapping-based spiral cutting strategy for pocket machining. Int J Adv Manuf Technol 67(9):2489–2500
Zhao Z, Wang C, Zhou H, Qin Z (2007) Pocketing toolpath optimization for sharp corners. J Mater Process Technol 192–193:175–180
Zhao Z, Liu B, Zhang M, Zhou H, Yu S (2009) Toolpath optimization for high speed milling of pockets. In: 2009 Second International Conference on Information and Computing Science, vol 1, pp 327–330
Held M, Spielberger C (2009) A smooth spiral tool path for high speed machining of 2D pockets. Comput Aided Des 41(7):539–550
Hauth S, Linsen L (2011) Double-spiral tool path in configuration space. Int J Adv Manuf Technol 54(9):1011–1022
Hauth S, Linsen L (2012) Cycloids for polishing along double-spiral toolpaths in configuration space. Int J Adv Manuf Technol 60(1):343–356
Yang J, Bin H, Zhang X, Liu Z (2003) Fractal scanning path generation and control system for Selective Laser Sintering (SLS). Int J Mach Tool Manuf 43(3):293–300
Gan WF, Fu JZ, Shen HY, Chen ZY, Lin ZW (2014) Five-axis tool path generation in CNC machining of T-spline surfaces. Comput Aided Des 52:51–63
Lin Z, Fu J, Shen H, Gan W (2014) A generic uniform scallop tool path generation method for five-axis machining of freeform surface. Comput Aided Des 56:120–132
Lin Z, Fu J, Sun Y, Gao Q, Xu G, Wang Z (2017) Non-retraction toolpath generation for irregular compound freeform surfaces with the LKH TSP solver. Int J Adv Manuf Technol 92(5):2325–2339
Lee YS (1998) Mathematical modelling using different endmills and tool placement problems for 4- and 5-axis NC complex surface machining. Int J Prod Res 36(3):785–814
Lee YS (1998) Non-isoparametric tool path planning by machining strip evaluation for 5-axis sculptured surface machining. Comput Aided Des 30(7):559–570
Lo CC (1999) Efficient cutter-path planning for five-axis surface machining with a flat-end cutter. Comput Aided Des 31(9):557–566
Chiou CJ, Lee YS (2002) A machining potential field approach to tool path generation for multi-axis sculptured surface machining. Comput Aided Des 34(5):357–371
Jerard RB, Hussaini SZ, Drysdale RL, Schaudt B (1989) Approximate methods for simulation and verification of numerically controlled machining programs. Vis Comput 5(6):329–348
Kim T, Sarma SE (2002) Toolpath generation along directions of maximum kinematic performance; a first cut at machine-optimal paths. Comput Aided Des 34(6):453–468
Makhanov S, My C, Bohez S, Munlin M, Phien N, Tabucanon M (2005) On 5-axis freeform surface machining optimization: Vector field clustering approach. Int J CAD/CAM 5(1):1–10
Shi J, Malik J (2000) Normalized cuts and image segmentation. IEEE Trans Pattern Anal Mach Intell 22(8):888–905
Roman A, Barocio E, Huegel JC, Bedi S (2015) Rolling ball method applied to 3½½-axis machining for tool orientation and positioning and path planning. Adv Mech Eng 7(12):1–12
Makhanov S (2007) Optimization and correction of the tool path of the five-axis milling machine: Part 1. Spatial optimization. Math Comput Simul 75(5):210–230. Applied Scientific Computing: Advanced Grid Generation, Approximation and Simulation
Quinsat Y, Sabourin L (2006) Optimal selection of machining direction for three-axis milling of sculptured parts. Int J Adv Manuf Technol 27(11):1132–1139
Dong WP, Sullivan PJ, Stout KJ (1994) Comprehensive study of parameters for characterising three- dimensional surface topography: III: Parameters for characterising amplitude and some functional properties. Wear 178(1):29–43
Vijayaraghavan A, Hoover AM, Hartnett J, Dornfeld DA (2009) Improving endmilling surface finish by workpiece rotation and adaptive toolpath spacing. Int J Mach Tool Manuf 49(1):89–98
Xu K, Tang K (2014) Five-axis tool path and feed rate optimization based on the cutting force-area quotient potential field. Int J Adv Manuf Technol 75(9):1661–1679
Budak E, Altintasÿ Y, Armarego EJA (1996) Prediction of milling force coefficients from orthogonal cutting data. J Manuf Sci Eng 118(2):216–224
Zhang K, Tang K (2014) An efficient greedy strategy for five-axis tool path generation on dense triangular mesh. Int J Adv Manuf Technol 74(9):1539–1550
Kumazawa GH, Feng HY, Fard MJB (2015) Preferred feed direction field: a new tool path generation method for efficient sculptured surface machining. Comput Aided Des 67–68:1–12
Delmarcelle T, Hesselink L (1994) The topology of symmetric, second-order tensor fields. In: Proceedings Visualization ’94, pp 140–147
Liu X, Li Y, Ma S, Lee CH (2015) A tool path generation method for freeform surface machining by introducing the tensor property of machining strip width. Comput Aided Des 66:1–13
Winslow AM (1966) Numerical solution of the quasilinear poisson equation in a nonuniform triangle mesh. J Comput Phys 1(2):149–172
Anotaipaiboon W, Makhanov SS (2008) Curvilinear space-filling curves for five-axis machining. Comput Aided Des 40(3):350–367. https://doi.org/10.1016/j.cad.2007.11.007
Hu P, Tang K (2016) Five-axis tool path generation based on machine-dependent potential field. Int J Comput Integr Manuf 29(6):636–651
Hu P, Chen L, Tang K (2017) Efficiency-optimal iso-planar tool path generation for five-axis finishing machining of freeform surfaces. Comput Aided Des 83:33–50
Pavanaskar S, Pande S, Kwon Y, Hu Z, Sheffer A, McMains S (2015) Energy-efficient vector field based toolpaths for CNC pocketmachining. J Manuf Process 20:314–320
Maharik R, Bessmeltsev M, Sheffer A, Shamir A, Carr N (2011) Digital micrography. ACM Trans Graph 30(4)
Xu K, Luo M, Tang K (2016) Machine based energy-saving tool path generation for five-axis end milling of freeform surfaces. J Clean Prod 139:1207–1223
Diaz N, Redelsheimer E, Dornfeld D (2011) Energy consumption characterization and reduction strategies for milling machine tool use. In: Hesselbach J, Herrmann C (eds) Glocalized Solutions for Sustainability in Manufacturing. Springer, Berlin Heidelberg, Berlin, Heidelberg, pp 263–267
Park CW, Kwon KS, Kim WB, Min BK, Park SJ, Sung IH, Yoon YS, Lee KS, Lee JH, Seok J (2009) Energy consumption reduction technology in manufacturing – a selective review of policies, standards, and research. Int J Precis Eng Manuf 10(5):151–173
Lu Y, Ding Y, Zhu L (2017) Tool path generation via the multi-criteria optimisation for flat-end milling of sculptured surfaces. Int J Prod Res 55(15):4261–4282
Zhang K, Tang K (2016) Optimal five-axis tool path generation algorithm based on double scalar fields for freeform surfaces. Int J Adv Manuf Technol 83(9):1503–1514
Liu X, Li Y, Xu X (2018) A region-based tool path generation approach for machining freeform surfaces by applying machining strip width tensor. Int J Adv Manuf Technol 98(9):3191–3204
Sun S, Sun Y, Xu J, Lee YS (2018) Iso-planar feed vector-fields-based streamline tool path generation for five-axis compound surface machining with torus-end cutters. J Manuf Sci Eng 140(7)
Chiou CJ, Lee YS (1999) A shape-generating approach for multi-axis machining g-buffer models 31(12):761–776
Feiyan H, Chuanwei Z, Wei G, Xianlong P, Wu Z (2019) A high-efficiency generation method of integral impeller channel tool path based on parametric domain template trajectory mapping. Int J Adv Manuf Technol 100(1):75–85
Dang LV, Vacharanukul K, Makhanov SS (2019) Compact radial zigzag for five-axis machining of STL surfaces. Int J Adv Manuf Technol 105(5):1853–1882
Floater MS, Hormann K (2005) Surface parameterization: a tutorial and survey. In: Dodgson NA, Floater MS, Sabin MA (eds) Advances in Multiresolution for Geometric Modelling. Springer, Berlin Heidelberg, Berlin, Heidelberg, pp 157–186
Schlemmer M, Heringer M, Morr F, Hotz I, Hering-Bertram M, Garth C, Kollmann W, Hamann B, Hagen H (2007) Moment invariants for the analysis of 2D flow fields. IEEE Trans Vis Comput Graph 13(6):1743–1750
Gordon WJ, Thiel LC (1982) Transfinite mappings and their application to grid generation. Appl Math Comput 10–11:171–233
Ma JW, Lu XL, Li GL, Qu ZW, Qin FZ (2020) Toolpath topology design based on vector field of tool feeding direction in sub-regional processing for complex curved surface. J Manuf Process 52:44–57
Jia ZY, Zhao XX, Ma JW, Chen SY, Qin FZ, Liu Z (2019) Toolpath generation in sub-regional processing with constraint of constant scallop-height at boundary for complex curved surface. Precis Eng 55:217–230
Huo G, Jiang X, Su C, Lu Z, Sun Y, Zheng Z, Xue D (2019) CNC tool path generation for freeform surface machining based on preferred feed direction field. Int J Precis Eng Manuf 20(5):777–790
Dang LV, Makhanov S (2020) Enhanced vector flow of significant directions for five-axis machining of STL surfaces. Int J Prod Res 0(0):1–32. https://doi.org/10.1080/00207543.2020.1749325
Xu C, Prince J (1998) Generalized gradient vector flow external forces for active contours. Signal Process 71(2):131–139
Li Z, Tang K (2021) Partition-based five-axis tool path generation for freeform surface machining using a non-spherical tool. J Manuf Syst 58:248–262
Gong H, Cao LX, Liu J (2008) Second order approximation of tool envelope surface for 5-axis machining with single point contact. Comput Aided Des 40(5):604–615
Su C, Jiang X, Huo G, Sun Y, Zheng Z (2020) Initial tool path selection of the iso-scallop method based on offset similarity analysis for global preferred feed directions matching. Int J Adv Manuf Technol 106(7):2675–2687
Yang YJ, Zeng W, Meng XX (2016) Conformal freeform surfaces. Comput Aided Des 81:48–60
Zou Q (2021) Length-optimal tool path planning for freeform surfaces with preferred feed directions based on poisson formulation. Comput Aided Des 139
Bohez E, Makhanov S, Sonthipermpoon K (2000) Adaptive nonlinear tool path optimization for five-axis machining. Int J Prod Res 38(17):4329–4343
He D, Li Z, Li Y, Tang K (2021) Quasi-developable and signed multi-strip approximation of a freeform surface mesh for efficient flank milling. Comput Aided Des 140:103083
Bo P, Barton M, Plakhotnik D, Pottmann H (2016) Towards efficient 5-axis flank CNC machining of free-form surfaces via fitting envelopes of surfaces of revolution. Comput Aided Des 79:1–11
Bo P, González H, Calleja A, de Lacalle LNL, Barton M (2020) 5-axis double-flank CNC machining of spiral bevel gears via custom-shaped milling tools - Part I: Modeling and simulation. Precis Eng 62:204–212
Kim YJ, Elber G, Barton M, Pottmann H (2015) Precise gouging-free tool orientations for 5-axis CNC machining. Comput Aided Des 58:220–229. Solid and Physical Modeling 2014
Zhang X, Zhang J, Zheng X, Pang B, Zhao W (2017) Tool orientation optimization of 5-axis ball-end milling based on an accurate cutter-workpiece engagement model. CIRP J Manuf Sci Technol 19:106–116
Bartoň M, Bizzarri M, Rist F, Sliusarenko O, Pottmann H (2021) Geometry and tool motion planning for curvature adapted CNC machining. ACM Trans Graphics 40(4)
Lu Y, Ding Y, Zhu L (2016) Simultaneous optimization of the feed direction and tool orientation in five-axis flat-end milling. Int J Prod Res 54(15):4537–4546
Lartigue C, Tournier C, Ritou M, Dumur D (2004) High-performance NC for HSM by means of polynomial trajectories. CIRP Ann 53(1):317–320
Calleja A, Bo P, González H, Bartoň M, López de Lacalle LN (2018) Highly accurate 5-axis flank CNC machining with conical tools. Int J Adv Manuf Technol 97(5):1605–1615
Bo P, Barton M (2019) On initialization of milling paths for 5-axis flank CNC machining of free-form surfaces with general milling tools. Comput Aided Geom Des 71:30–42
Bohez E (2002) Five-axis milling machine tool kinematic chain design and analysis. Int J Mach Tool Manuf 42(4):505–520. https://doi.org/10.1016/S0890-6955(01)00134-1
Zhou X, Liu X, Li M, Wang Z, Meng X (2017) Post-processor development of a five-axis machine tool with optimization tool radius compensation. Int J Adv Manuf Technol 88(5):1505–1522. https://doi.org/10.1007/s00170-016-8801-3
My CA, Bohez EL (2019) A novel differential kinematics model to compare the kinematic performances of 5-axis CNC machines. Int J Mech Sci 163:105117 . https://doi.org/10.1016/j.ijmecsci.2019.105117
Lee RS, She CH (1997) Developing a postprocessor for three types of five-axis machine tools. Int J Adv Manuf Technol 13(9):658–665. https://doi.org/10.1007/BF01350824
Mahbubur R, Heikkala J, Lappalainen K, Karjalainen J (1997) Positioning accuracy improvement in five-axis milling by post processing. Int J Mach Tool Manuf 37(2):223–236. https://doi.org/10.1016/0890-6955(95)00091-7
She CH, Lee RS (2000) A postprocessor based on the kinematics model for general five-axis machine tools. J Manuf Process 2(2):131–141. https://doi.org/10.1016/S1526-6125(00)70021-1
Jung Y, Lee D, Kim J, Mok H (2002) NC post-processor for 5-axis milling machine of table-rotating/tilting type. J Mater Process Technol 130–131:641–646. https://doi.org/10.1016/S0924-0136(02)00725-2
She CH, Chang CC (2007) Design of a generic five-axis postprocessor based on generalized kinematics model of machine tool. Int J Mach Tool Manuf 47(3):537–545. https://doi.org/10.1016/j.ijmachtools.2006.06.002
She CH, Huang ZT (2008) Postprocessor development of a five-axis machine tool with nutating head and table configuration. Int J Adv Manuf Technol 38(7):728–740. https://doi.org/10.1007/s00170-007-1126-5
Yang J, Altintas Y (2013) Generalized kinematics of five-axis serial machines with non-singular tool path generation. Int J Mach Tool Manuf 75:119–132. https://doi.org/10.1016/j.ijmachtools.2013.09.002
Farouki RT, Han CY, Li S (2014) Inverse kinematics for optimal tool orientation control in 5-axis CNC machining. Comput Aided Geom Des 31(1):13–26. https://doi.org/10.1016/j.cagd.2013.11.002
Tang Q, Yin S, Chen F, Huang S, Luo H, Geng J (2018) Development of a postprocessor for head tilting-head rotation type five-axis machine tool with double limit rotation axis. Int J Adv Manuf Technol 97(9):3523–3534. https://doi.org/10.1007/s00170-018-2195-3
Moriwaki T (2008) Multi-functional machine tool. CIRP Ann 57(2):736–749. https://doi.org/10.1016/j.cirp.2008.09.004
Nakaminami M, Tokuma T, Moriwaki T, Nakamoto K (2007) Optimal structure design methodology for compound multiaxis machine tools - I - analysis of requirements and specifications -. IJAT 1:78–86
Cui G, Lu Y, Li J, Gao D, Yao Y (2012) Geometric error compensation software system for CNC machine tools based on NC program reconstructing. Int J Adv Manuf Technol 63(1):169–180. https://doi.org/10.1007/s00170-011-3895-0
Chen D, Dong L, Bian Y, Fan J (2015) Prediction and identification of rotary axes error of non-orthogonal five-axis machine tool. Int J Mach Tool Manuf 94:74–87. https://doi.org/10.1016/j.ijmachtools.2015.03.010
Son HJ, Hwang JD, Cho YT, Jung YG (2016) Development of post processor for five-axis machine of non-orthogonal head tilting type. Int J Precis Eng Manuf 17(2):189–194. https://doi.org/10.1007/s12541-016-0024-x
Wu C, Fan J, Wang Q, Chen D (2018) Machining accuracy improvement of non-orthogonal five-axis machine tools by a new iterative compensation methodology based on the relative motion constraint equation. Int J Mach Tool Manuf 124:80–98. https://doi.org/10.1016/j.ijmachtools.2017.07.008
Xu J, Zhang D, Sun Y (2019) Kinematics performance oriented smoothing method to plan tool orientations for 5-axis ball-end CNC machining. Int J Mech Sci 157–158:293–303. https://doi.org/10.1016/j.ijmecsci.2019.04.038
Sørby K (2007) Inverse kinematics of five-axis machines near singular configurations. Int J Mach Tool Manuf 47(2):299–306. https://doi.org/10.1016/j.ijmachtools.2006.03.011
Liu Y, Wan M, Xiao QB, Zhang WH (2019) Identification and compensation of geometric errors of rotary axes in five-axis machine tools through constructing equivalent rotary axis (ERA). Int J Mech Sci 152:211–227. https://doi.org/10.1016/j.ijmecsci.2018.12.050
Tutunea-Fatan O, Feng HY (2004) Configuration analysis of five-axis machine tools using a generic kinematic model. Int J Mach Tool Manuf 44(11):1235–1243. https://doi.org/10.1016/j.ijmachtools.2004.03.009
Wang S, Geng L, Zhang Y, Liu K, Ng T (2015) Cutting force prediction for five-axis ball-end milling considering cutter vibrations and run-out. Int J Mech Sci 96–97:206–215. https://doi.org/10.1016/j.ijmecsci.2015.04.007
Marketsandresearch.biz (2019) Global 5-axis CNC Machining Centers Market Insights, Forecast to 2025. https://www.marketinsightsreports.com/reports/02131094499/global-5-axis-cnc-machining-centers-market-insights-forecast-to-2025/discount?Mode=46&Source=DN
Jiang M, Machiraju R, Thompson D (2005) Detection and visualization of vortices. In: The Visualization Handbook, Academic Press, pp 295–309
Laramee RS, Hauser H, Zhao L, Post FH (2007) Topology-based flow visualization, the state of the art. In: Hauser H, Hagen H, Theisel H (eds) Topology - based Methods in Visualization. Springer, Berlin Heidelberg, Berlin, Heidelberg, pp 1–19
Pobitzer A, Peikert R, Fuchs R, Schindler B, Kuhn A, Theisel H, Matkovic K, Hauser H (2011) The state of the art in topology-based visualization of unsteady flow. Comput Graph Forum 30(6):1789–1811. https://onlinelibrary.wiley.com/doi/pdf/10.1111/j.1467-8659.2011.01901.x
Edmunds M, Laramee RS, Chen G, Max N, Zhang E, Ware C (2012) Surface-based flow visualization. Comput Graph 36(8):974–990. https://doi.org/10.1016/j.cag.2012.07.006
Biagi S, Bonfiglioli A (2018) An introduction to the geometrical analysis of vector fields. World Scientific. https://www.worldscientific.com/doi/pdf/10.1142/11165
Vaxman A, Campen M, Diamanti O, Bommes D, Hildebrandt K, Technion MBC, Panozzo D (2017) Directional field synthesis, design, and processing. In: ACM SIGGRAPH 2017 Courses. Association for Computing Machinery, New York, NY, USA, SIGGRAPH ’17. https://doi.org/10.1145/3084873.3084921
Liu Y, Xu W, Wang J, Zhu L, Guo B, Chen F, Wang G (2011) General planar quadrilateral mesh design using conjugate direction field. ACM Trans Graph 30(6):1–10. https://doi.org/10.1145/2070781.2024174
Diamanti O, Vaxman A, Panozzo D, Sorkine-Hornung O (2014) Designing N-poly vector fields with complex polynomials. Comput Graph Forum 33(5):1–11. https://onlinelibrary.wiley.com/doi/pdf/10.1111/cgf.12426
Bommes D, Lévy B, Pietroni N, Puppo E, Silva C, Tarini M, Zorin D (2013) Quad-nesh generation and processing: a survey. Comput Graph Forum 32(6):51–76. https://doi.org/10.1111/cgf.12014
Zhu Z, Moorhead RJ (1995) Extracting and visualizing ocean eddies in time-varying flow fields
Jones C, Ma K (2010) Visualizing flow trajectories using locality-based rendering and warped curve plots. IEEE Trans Vis Comput Graph 16(6):1587–1594
Kenwright D, Haimes R (1997) Vortex identification–applications in aerodynamics: a case study. In: Proceedings of the 8th Conference on Visualization ’97, VIS ’97. IEEE Computer Society Press, Washington, DC, USA, p 413–ff
Roth M, Peikert R (1996) Flow visualization for turbomachinery design. In: Proceedings of Seventh Annual IEEE Visualization ’96, pp 381–384
Laramee RS, Garth C, Doleisch H, Schneider J, Hauser H, Hagen H (2005) Visual analysis and exploration of fluid flow in a cooling jacket. In: VIS 05. IEEE Visualization, 2005, pp 623–630
Wiebel A, Garth C, Scheuermann G (2007) Computation of localized flow for steady and unsteady vector fields and its applications. IEEE Trans Vis Comput Graph 13(4):641–651
Palke D, Lin Z, Chen G, Yeh H, Vincent P, Laramee R, Zhang E (2011) Asymmetric tensor field visualization for surfaces. IEEE Trans Vis Comput Graph 17(12):1979–1988
Roy T, Gout C, Le Guyader C, Lenglart E (2013) Wind velocity field approximation from sparse data. In: 2013 IEEE International Geoscience and Remote Sensing Symposium - IGARSS, pp 1606–1609
Pepper D, Rasmussen C, Fyda D (2017) A meshless method using global radial basis functions for creating 3-D wind fields from sparse meteorological data. Comput Assist Methods Eng Sci 21(3/4):233–243
Pepper DW, Waters J (2016) A local meshless method for approximating 3D wind fields. J Appl Meteorol Climatol 55(1):163–172. https://journals.ametsoc.org/jamc/article-pdf/55/1/163/3583721/jamc-d-15-0246_1.pdf
Cervantes DA, González Casanova P, Gout C, Moreles MÁ (2018) A line search algorithm for wind field adjustment with incomplete data and RBF approximation. Comput Appl Math 37(3). https://doi.org/10.1007/S40314-017-0461-X
Knupp P (1995) Mesh generation using vector fields. J Comput Phys 119(1):142–148. https://doi.org/10.1006/jcph.1995.1122
Huang J, Shi X, Liu X, Zhou K, Wei LY, Teng SH, Bao H, Guo B, Shum HY (2006) Subspace gradient domain mesh deformation. ACM Trans Graph 25(3):1126–1134. https://doi.org/10.1145/1141911.1142003
Koenderink JJ, Van Doorn AJ (1975) Invariant properties of the motion parallax field due to the movement of rigid bodies relative to an observer. Opt Acta 22(9):773–791
Zhang E, Mischaikow K, Turk G (2006) Vector field design on surfaces 25(4):1294–1326
Azencot O, Vantzos O, Ben-Chen M (2016) Advection-based function matching on surfaces. In: Computer Graphics Forum, vol 35, no. 5, Wiley Online Library, pp 55–64
Huang Z, Ju T (2016) Extrinsically smooth direction fields. Comput Graph 58:109–117
Kee BB, Liu G, Lu C (2008) A least-square radial point collocation method for adaptive analysis in linear elasticity. Eng Anal Boundary Elem 32(6):440–460
Kuroe Y, Mitsui M, Kawakami H, Mori T (1998) A learning method for vector field approximation by neural networks. In: 1998 IEEE International Joint Conference on Neural Networks Proceedings. IEEE World Congress on Computational Intelligence (Cat. No. 98CH36227), vol 3, pp 2300–2305
Cabrera DAC, Gonzalez-Casanova P, Gout C, Juárez LH, Reséndiz LR (2013) Vector field approximation using radial basis functions. J Comput Appl Math 240:163–173
Majdisova Z, Skala V (2017) Radial basis function approximations: Comparison and applications. Appl Math Model 51:728–743. https://doi.org/10.1016/j.apm.2017.07.033
Smolik M, Skala V, Majdisova Z (2018) Vector field radial basis function approximation. Adv Eng Softw 123:117–129
Smolik M, Skala V (2017) Vector field second order derivative approximation and geometrical characteristics. In: Gervasi O, Murgante B, Misra S, Borruso G, Torre CM, Rocha AMA, Taniar D, Apduhan BO, Stankova E, Cuzzocrea A (eds) Computational science and its applications - ICCSA 2017. Springer International Publishing, Cham, pp 148–158
Theisel H, Rossl C, Weinkauf T (2008) Topological representations of vector fields. In: Spagnuolo M, Floriani LD (eds) Shape Analysis and Structuring. Springer, pp 215–240
Yau W, Li J, Wang H (2004) Nonlinear phase portrait modeling of fingerprint orientation. In: IEEE Proceedings of Control, Automation, Robotics, and Vision Conference, vol 2, pp 1262–1267
Helman J, Hesselink L (1989) Representation and display of vector field topology in fluid flow data sets. Computer 8:27–36
Kass M, Witkin A (1987) Vector field analysis for oriented patterns. Comput Vis Graph Image Process 37(3):362–385
Shu CF, Jain RC (1994) Vector field analysis for oriented patterns. IEEE Trans Pattern Anal Mach Intell 16(9):946–950
Acheson DJ (1990) Elementary fluid dynamics. Oxford University Press
Corpetti T, Mémin É, Pérez P (2003) Extraction of singular points from dense motion fields: an analytic approach. J Math Imaging Vis 19(3):175–198. https://doi.org/10.1023/A:1026352203836
Scheuermann G, Kruger H, Menzel M, Rockwood AP (1998) Visualizing nonlinear vector field topology. IEEE Trans Vis Comput Graph 4(2):109–116
Wang Y, Hu J, Phillips D (2007) A fingerprint orientation model based on 2D Fourier expansion (FOMFE) and its application to singular-point detection and fingerprint indexing. IEEE Trans Pattern Anal Mach Intell 29(4):573–585
Rangayyan R, Ayres F (2006) Gabor filters and phase portraits for the detection of architectural distortion in mammograms. IEEE Trans Pattern Anal Mach Intell 44:883–894
Post FH, Vrolijk B, Hauser H, Laramee RS, Doleisch H (2002) Feature extraction and visualisation of flow fields. In: Eurographics 2002 - STARs, Eurographics Association. https://doi.org/10.2312/egst.20021053
El-Sayed MA (2012) Edges detection of images: Algorithms of edges detection for digital image. Lambert
Kass M, Witkin A, Terzopoulos D (1988) Snakes: Active contour models. Int J Comput Vis 1(4):321–331
Xu C, Prince JL (1998) Snakes, shapes, and gradient vector flow. IEEE Trans Image Process 7(3):359–369
Osher S, Sethian JA (1988) Fronts propagating with curvature-dependent speed: Algorithms based on Hamilton-Jacobi formulations. J Comput Phys 79(1):12–49. https://doi.org/10.1016/0021-9991(88)90002-2
de Leeuw W, van Liere R (1999) Collapsing flow topology using area metrics. In: Proceedings of the Conference on Visualization ’99: Celebrating Ten Years, VIS ’99, pp 349–354
Wischgoll T, Scheuermann G (2001) Detection and visualization of closed streamlines in planar flows. IEEE Trans Vis Comput Graph 7(2):165–172. https://doi.org/10.1109/2945.928168
Theisel H, Weinkauf T, Hege HC, Seidel HP (2004) Grid-independent detection of closed stream lines in 2d vector fields. In: Proceeding of Vision, Modeling and Visualization 2004, pp 421–428
Skraba P, Wang B, Chen G, Rosen P (2014) 2D vector field simplification based on robustness. In: 2014 IEEE Pacific Visualization Symposium, pp 49–56
Skraba P, Wang B, Chen G, Rosen P (2015) Robustness-based simplification of 2D steady and unsteady vector fields. IEEE Trans Vis Comput Graph 21(8):930–944
Branner B, Dias K (2010) Classification of complex polynomial vector fields in one complex variable. J Differ Equations Appl 16(5–6):463–517
Mol R, Sánchez FS (2019) Real analytic vector fields with first integral and separatrices. Revista de la Real Academia de Ciencias Exactas, Físicas y Naturales Serie A Matemáticas 113(4):4031–4049
Novello T, Paixão J, Tomei C, Lewiner T (2021) Discrete line fields on surfaces. Topol App 290:107603
Ray N, Vallet B, Li WC, Lévy B (2008) N-symmetry direction field design. ACM Trans Graph 27(2):1–13
Helman JL, Hesselink L (1991) Visualizing vector field topology in fluid flows. IEEE Comput Graph Appl 11(3):36–46
Acknowledgements
The author wishes to thank the Reviewers of the paper, the Editor of the Journal Prof. Nee for the insightful comments and attention to details. Special thanks go to Dr. Le Van Dang who provided a valuable technical assistance.
Funding
This research is supported by the Center of Excellence in Biomedical Engineering of Thammasat University.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Conflicts of interest
The author certifies that he has NO affiliations with or involvement in any organization or entity with any financial interest (such as honorarium; educational grants; participation in speakers’ bureaus; membership, employment, consultancies, stock ownership, or other equity interest; and expert testimony or patent-licensing arrangements), or non-financial interest (such as personal or professional relationships, affiliations, knowledge or beliefs) in the subject matter or materials discussed in this manuscript.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A. Design of the five-axis machines
There are 120 possible combinations of the joints of a five-axis mechanism. Each combination of the joints has 6 alternative locations of the axes on the tool and the workpiece chain. Furthermore, there are three possible choices of the two rotary axes. Therefore, the total number of the possible configurations is \(3 \times 120\times 6 = 2160\) (Bohez [199] and Zhou et al. [200]).
My and Bohez [201] argue that in practice the position of the rotary axes is usually near to the tilting table or to the spindle. Using this principle and ignoring the 3 possible choices of the 2 rotary axes reduces the number of feasible configurations to 108. The design of the five-axis machine implies that three translation axes are mutually orthogonal and are aligned with the MCS. The tool axis is always parallel to Z axis of the MCS. Given these assumptions, let us denote the rotation axis by R and the translation axis by T. The survey by Bohez [199] introduces the five-axis mechanisms as follows. “Four main groups can be distinguished: (i) three T axes and two R axes; (ii) two T axes and three R axes; (iii) one T axis and four R axes and (iv) five R axes. Nearly all existing five-axis machine are in group (i). Also a number of welding robots, filament winding machines and laser machining centers fall in this group. Only limited instances of five-axis machines in group (ii) exist for the machining the ship propellers. Groups (iii) and (iv) are used in the design of robots. Usually more degrees of freedom are added.”
Let us consider the five-axis machines in group (i). The kinematic chain is composed of three joints corresponding to the translation axes denoted by X, Y and Z and two rotary joints A, B or A, C or B, C, where A, B and C denote the rotations around vectors parallel to X, Y and Z respectively. Note that the linear axes are mutually orthogonal. However, the rotation axes are not necessarily orthogonal. Therefore, if the rotations are designed around vectors parallel to the linear axes (such as A, B or C), the configuration is called the orthogonal rotary axis, otherwise it is called the non-orthogonal rotary axis. The model of a five-axis machine is often thought of as two kinematic chains (the tool and the workpiece chain) linked in the world coordinate system). In the R-T notations the kinematic chain is given by \(T^\prime T^\prime R^\prime R^\prime T\), where the prime denotes an axis carrying the workpiece. In the XYZABC notations it is given by \(X^\prime Y^\prime A^\prime C^\prime Z\).
The classification introduced in the recent literature is based on the following criteria
-
1.
Relationship between the two kinematic chains. The five-axis machines are classified into six groups by Bohez [199]: (i) 0/5 - all axes are on the workpiece chain while the tool is attached to a fixed frame; (ii) 5/0 - all axis on the tool chain and the workpiece is attached to a fixed clamping device; (iii) 1/4 - one axis on the tool and four axes are on the workpiece; (iv) 4/1 - four axes are on the tool and one axis is attached to the workpiece; (v) similarly, 2/3 and 3/2 are the machines with two axes attached to the tool and three axes attached to the workpiece and vice versa.
-
2.
Relative location of the rotary axes in the two kinematic chains (i) 0/2 the two rotary axes are both attached to the table (table-tilting type); (ii) 2/0 both rotary axes are attached to the tool (spindle-tilting type), and (iii) 1/1 the rotary axes are distributed on both the tool and the table chain (table/spindle tilting type). This simple classification is included in Makhanov and Anotaipaiboon [7], Bohez [199], My and Bohez [201], Lee and She [202], Mahbubur et al. [203], She and Lee [204], Jung et al. [205], She and Chang [206], She and Huang [207], Yang and Altintas [208], Farouki et al. [209], and Tang et al. [210].
-
3.
The tool axis. According to Moriwaki [211], five-axis machines are classified into vertical, horizontal, and the double column configuration machine types. In vertical machines, the tool moves vertically. The tool of horizontal machines is attached to a horizontal wall-frame. Finally, machining large industrial parts is often performed by a tool attached to a beam constructed from two columns. This machine is defined as the double column machine. In this case, the tool can move along the vertical axis as well as along the horizontal axis. Nakaminami et al. [212] note that the actual structure of the machine is determined by the required accuracy, rigidity, thermal deformation property, and the ease of manufacture The orthogonal machines have gained wide-spread acceptance in modern manufacturing. Their kinematic models have been thoroughly studied and experimented with by My and Bohez [201]. However, the non-orthogonal machines have certain advantages. In particular, a nutating head or a nutating table can change the position and orientation of the tool relative to the workpiece towards any admissible angle. In addition, the tool is able to traverse continuously between the horizontal and vertical positions (see Cui et al. [213]). The mathematical models of the non-orthogonal machines are presented and analyzed in She and Huang [207], Yang and Altintas [208], Chen et al. [214], Son et al. [215], and Wu et al. [216]. Finally, My and Bohez [201], Lee and She [202] and She and Huang [207] introduce classification based on
-
4.
Relative location of the rotary axes and orthogonality, allowing one non-orthogonal axis based on the following:
-
Type I: (0/2) the rotary axes are on the workpiece carrying chain. Both axes are orthogonal (see Bohez [199], She and Chang [206], Yang and Altintas [208], and Xu et al. [217]).
-
Type II: (0/2N) the rotary axes are on the workpiece carrying chain. One rotary axis is orthogonal and the other one is non-orthogonal (see She and Huang [207], Sørby [218], and Liu et al. [219]).
-
Type III: (2/0) the rotary axes are orthogonal and are on the tool (see She and Chang [206], Yang and Altintas [208], Farouki et al. [209], and Tutunea-Fatan and Feng [220]).
-
Type IV: (2N/0) One rotary axis is non-orthogonal. Both rotary axes are on the tool (see She and Chang [206], She and Huang [207], and Tutunea-Fatan and Feng [220]).
-
Type V: (1/1) One rotary axis on the tool, the second rotary axis is on the workpiece. Both the axes are orthogonal (see Bohez [199], She and Chang [206], Yang and Altintas [208], and Farouki et al. [209]).
-
Type VI: (1N/1). The first rotary axis is on the tool; the second rotary axis is on the workpiece. The rotary axis on the tool is non-orthogonal (see She and Huang [207] and Wang et al. [221]).
-
Type VII: (1/1N): Observe that the My and Bohez [201] ignore the 7-th possible type (1/1N). In order to complete the classification, Type VII: (1/1N) is suggested: the first rotary axis is on the tool, whereas the second rotary axis is on the workpiece. The axes on the workpiece are non-orthogonal.
-
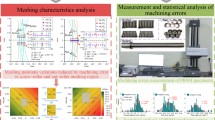
A comprehensive report on the recent and future CNC machine market is presented by Marketsandresearch.biz [222]. According to the report the most popular five-axis CNC machine manufacturers are: HAAS Automation, Hurco, Makino, Okuma, Shenyang Machine Tools, CMS North America, Fanuc, Jyoti CNC Automation, Yamazaki Mazak, Mitsubishi Electric and Siemens AG. Figures 18, 19, and 20 are examples of different types of five-axis machines developed by these manufacturers. Figure 21 shows a machine with a non-orthogonal axis on the tool.

Mazak (INTEGREX-i-400S-2), classification 1) 2/3, 2) 1/1, 3) Vertical 4) Type V

Fanuc (VMC850), classification 1) 1/4, 2) 0/2, 3) Vertical, 4) Type I

Hendrick (HSLR-V), classification 1) 4/1, 2) 2/0, 3) Double Column 4) Type III

Maho (DMU60P), classification 1) 3/2, 2) 1/1, 3) Horizontal 4) Type VI
Currently, commercial five-axis software such as Vericut, Fusion360, HSMWorks, PowerMill, SolidEdge, SolidWorks CAM, Solidcam, MasterCam, NX, Catia, Rhino CAM offer an excellent simulation of machining in the WCS. However, a simulation in the WCS does not produce a realistic outcome. In order to obtain an accurate result, the solid model of the actual machine must be built and incorporated into the CAM software. Moreover, the postprocessor to translate the toolpath into the MCS must comply with the virtual machine. Fortunately, the virtual controllers are available for the majority of commercially available machines. Moreover, if the controller is not available, it is often possible to modify the available controller. Building a system for machining experiments is not an easy task. Most start-up companies do not have this knowledge and rely on software from the vendor.
Appendix B. Vector fields in science and engineering
The goal of this section is to review the vector flow analysis for the professionals in five-axis manufacturing. The ideas and citations available in other fields such as image processing and pattern recognition are discussed.
1.1 B1 Classical vector fields
In this section the theory of VFA and selected applications of VF which are or could be potentially relevant to five-axis research are reviewed. VF are indispensable for many applications ranging from weather and ocean studies, physics, chemistry and automobile design, to the analysis of medical images and virtual reality. Unfortunately, many VFA techniques are not scalable to the increasing size and complexity of the real data. An obvious example is a five-axis G-code which can include tens or even hundreds of thousands of CC points. VFA is challenging from the viewpoint of human perception since no natural representation of the VF exists. Unlike, a surface, color or texture the VF are difficult to depict. Besides, specific mathematical techniques are required to develop algorithms to analyze and classify their topology. The readers interested in the general VFA are referred to surveys by Jiang et al. [223], Laramee et al. [224], Pobitzer et al. [225], and Edmunds et al. [226].
VF is a mathematical abstraction used in classical field theory to describe electromagnetism, gravitation, flows in fluid dynamics, aerodynamics, forces in mechanics and many other physical phenomena. Vector Calculus considers a VF as a continues field of n-dimensional vectors assigned to each point of a domain \(R^n\). A VF in \(R^2\) and \(R^3\) are visualized by a collection of arrows with a certain size and direction attached to every point of a subset in space such as a surface in \(R^3\). The generalizations of VF are tensor fields and tensor bundles analyzed by Biagi and Bonfiglioli [227].
It should be noted that the available terminology suffers from inconsistencies—some terms are synonymous, some are homonyms, and others are simply ambiguous and context-dependent. For instance, Vaxman et al. [228] suggest that if the magnitude is irrelevant and the vectors are normalized, then the VF should be called the direction field (DF) rather than the VF. Further, the VF can be multivalued, assigning a set of vectors rather than one vector at every point. Of a particular interest are rotational-symmetric DFs. Common variants are opposite (\(\pi\)-different) directions (2-DF), four \(\pi /2\)-different directions (4-DF), or two independent (\(\pi\)-different) pairs of directions (\(2^2\)-DF). This type of symmetry appears in many applications, e.g. when evaluating the principal curvature, the principal directions of stress, or strain tensors, conjugate directions or Langer’s lines (see Liu et al. [229], Diamanti et al. [230], and Bommes et al. [231]).
Note that the VFs applied to five-axis machining are usually 2-DF, i.e. the opposite or \(\pi\)-different directions. They are often called orientation field (OF) and depicted as a set of strokes rather than a set of paired vectors. However, in five-axis research such OFs (2-DFs) are usually called the VFs, implying that the opposite direction is also included (Dang and Makhanov [181]).
Another reason to consider one-vector VFs is that they are one of the most well-studied types. In particular, many important features such as parallel flows, shock waves (unsteady flows), convergent or divergent flows, vortex flows, irrotational flows and sources or sinks characterizing the behavior of the VF are considered as a representation of the physical flow. Vector Calculus operators such as grad, div, curl, def, \(\Delta\) (Laplacian), the famous Green Theorem and many other relevant properties are used to analyze the VF and solve the corresponding partial differential equations (PDE). The well-established fundamental disciplines applying the VFA are Fluid Dynamics, Aerodynamics, Theory of Electromagnetism, Theory of Gravitation, Classical Mechanics and many others. In particular, VFA is used in oceanography Zhu and Moorhead [232], hydrodynamics Jones and Ma [233], aerodynamics Kenwright and Haimes [234], turbo machinery and engineering mechanics Roth and Peikert [235], temperature of heated surfaces Laramee et al. [236], Wiebel et al. [237], and Palke et al. [238], weather forecast Roy et al. [239], Pepper et al. [240], Pepper and Waters [241], and Cervantes et al. [242], CAD Liu et al. [229], mesh generation Knupp [243], surface deformation Huang et al. [244], etc. The gradient of a function creates a VF which shows the direction of the steepest descent. Therefore, the gradient-based methods are fundamental in numerical minimization and optimization. The divergence is a linear operator mapping VFs to functions. The sign of an integral of the divergence over a domain shows a possible source or sink. The point at which the flux through an enclosing surface is zero has zero divergence. The operator curl maps a 3D VF onto another 3D VF which measures the amount that the VF circulates. Analogous to sources and sinks, the curl of the VF is generated by vortexes. The operator divergence measures the flow in and out of the domain, while the curl measures the flow along the boundary. If the integral of the curl is zero, the VF is irrotational (conservative). A div-free VF is also known as Hamiltonian, solenoidal, or incompressible.
Koenderink and Van Doorn [245] write that def is a VF which describes a contraction in a certain direction and an expansion in an orthogonal direction. The vector Calculus makes it possible to analyze geometric structures of VFs. Although, a general VF is neither curl-free nor div-free, it is often possible to find subregions having the above properties (see Zhang et al. [246]).
Recently, VFA has been applied to various contemporary areas of computer science and engineering such as pattern recognition (face recognition, fingerprint detection, character recognition, etc.), image segmentation, computerized data visualization (the analysis of flows in industrial and natural systems), computer animations, texture mapping and synthesis, non-photorealistic rendering, anisotropic shading, shape analysis, traffic and crowd simulation and many others. It is often the case that the VF is defined on a rectangular grid or even at an irregular set of points. Besides, the VF is often distorted by noise (see Cervantes et al. [242]). Therefore, many applications are required to interpolate or approximate the discrete VF and evaluate its features using the continuous VFA Cervantes et al. [242], Azencot et al. [247], and Huang and Ju [248]. Some common methods to approximate the discrete VF are the least-square method by Kee et al. [249], neural networks by Kuroe et al. [250], radial basis functions by Cabrera et al. [251], Majdisova and Skala [252], and Smolik et al. [253], and the second-order Taylor series by Smolik and Skala [254].
Note that VF can be represented not only by the Cartesian coordinates, but also by the angle-based approach, complex numbers, tensors, composite 1-Forms, complex polynomials, linear operators, spherical harmonics, etc. The details of these representations and relevant citations are compiled by Vaxman et al. [94].
1.2 B2 Singular points and separatrices
If we consider a two dimensional VF given by \( V=V(p) \equiv (V_x(x,y), V_y(x,y))\), the VFA is often performed in the neighbourhood of the critical (singular) points, where \(V(p)=0\). These points can be extracted using the winding number \(I_\Gamma\) defined as the number of revolutions of the VF along a closed curve \(\Gamma\). The winding number in a region of 2D VF is evaluated by the Cauchy Theorem as follows:
If \(I_\Gamma \ne 0\) there is at least one critical point inside the domain bounded by the curve. The flows around the critical points are reviewed by Theisel et al. [255] as follows 1) Parabolic sector: either all streamlines end, or all streamlines originate at the critical point. 2) Hyperbolic sector: all stream lines pass by the critical point, except for two stream lines being the boundaries of the sector. One of these two stream lines ends at the critical point while the other one originates at it. 3) Elliptic sector: all stream lines originate and end at the critical point. Figure 22 illustrates the classification. Consider, the corresponding Jacobian given by
Using the Taylor series around \(p_0=(x_0,y_0)\) yields \(V(p)=V(p_0)+J(p_0)(p-p_0)+O((p-p_0)^{2})\). Linearizing and assuming that \(p_0=(x_0,y_0)\) is a critical point, i.e. \(V(p_0)=0\), we have \(V(p)=J(p_0)(p-p_0)\). The eigenvalues \(\lambda _{i}\) of the Jacobian provide a classification of the first-order critical points given in Table 2 and Fig. 23, where \(J(p_0) \ne 0\), \(R_i=\text {Re}(\lambda _i),\, I_i=\text {Im}(\lambda _i),\,i=1,2.\)

From left to right: parabolic, hyperbolic, elliptic sector, an example of a critical point: p-parabolic sector, h-hyperbolic sector, e-elliptic sector, a stream line T separating two h-sectors

Critical points of a 2D VF, the first row from left to right: attracting focus, center, repelling focus, repelling node; the second row: attracting node, saddle, attracting star, repelling star
The analysis of the critical points is applied to analyze the phase portrait of systems of differential equations. Therefore, this classification is often called the phase portrait analysis (PPA). The PPA assumes that \(V(p_0)=0\). Therefore, a linear VF is given by \(V(p)=Jp\). If V(p) is discrete, J can be approximated by the linear least square method by minimizing \(\sum _{i}(V(p_i)-J(a,b,c,d))^2\) with regard to a, b, c, d in the neighborhood of p. A nonlinear approximation of the VF could also be used. A constraint non-linear approximation Yau et al. [256] could be used to retain the first-order coefficients suitable for PPA. Examples of early applications of PPA are a classification of the flows around the airfoil by Helman and Hesselink [257] and detecting independent flow patterns by Kass and Witkin [258].
Shu and Jain [259] show the relationship between the Jacobian-based PPA and the classical operators grad, div, curl and def proving the equivalence of the two schemes. For example, if the VF topology is the star, then \((\textbf {def}\,V)^2=(\textbf {curl}\,V)^2=0\) and \(\textbf {div}\,V>0\). If \(\textbf {div}\,V>0\) the star is repelling, otherwise it is attractive.
The generalization of the Rankin model of vortex proposed by Acheson [260] is a method of singular points (see Corpetti et al. [261]).
The approximation of the VF using the Hessian matrix, i.e. by the second-order Taylor series, is computationally expensive, but it provides additional options for PPA proposed by Smolik and Skala [254]. In this case
where \(L=x,y\),
is the Hessian matrix and \(J_x,J_y\) are the first and the second columns of the Jacobian. Writing the above system as equations of a conic section, yields
This makes it possible to classify the region as parabolic, elliptic, parallel or intersecting lines. Apparently, the combination of the first and the second-order classification has potential benefits. Usually, the VF is analyzed using a moving window. Therefore, the second-order model is able to detect whether the window contains single or multiple critical points. Scheuermann et al. [262] observe that “the piecewise linear or bilinear interpolation destroys the topology of the VF if there are higher order critical points present.” Therefore, they suggest detecting the presence of high order singularities and using a local polynomial approximation based on Clifford Algebra. The PPA of the OF has been effectively used for fingerprint analysis by Yau et al. [256] and Wang et al. [263], architectural distortion in mammograms by Rangayyan and Ayres [264], feature extraction and simplification of the flow fields by Post et al. [265], etc. During the last decades, readily distinguishable from other viewpoints was the idea to use the gradient VF in image processing. The analysis of \(|\textbf {grad}I|\), where I is the gray level of the image, gave a rise to many prominent edge detection methods designed to generate the edge maps and segment the objects of interest. We refer the interested readers to numerous textbooks on image processing (see, for instance, El-Sayed [266]). The gradient VF is used in combination with active contours by Kass et al. [267] and Xu and Prince [268] and level set methods by Osher and Sethian [269] designed for image segmentation. Interested readers are referred to the vast and well developed segmentation algorithms based on deformable shapes. The above methods require smooth, simplified VF which drive the deformable shapes to their destinations. Therefore, a variety of pre-processing procedures have been developed. In particular, the Gradient Vector Flow by Xu and Prince [268] based on the solution of system of elliptic PDE became standard to simplify the original VF.
The pre-processed VF is a solution of the system given by
where \(\lambda\) controls the diffusion and \(V^\prime\) is the original VF. The system is solved by iterations with regard to the pseudo-time t, i.e.
where n is the iteration number and \(\tau\) is the pseudo-time step. The initial condition is \(V=V^\prime\). The boundary conditions vary depending on the application. The importance of this model has been recognized in the image processing community. However, it is not well known in the material science and manufacturing. Note that one of the most popular modifications of this idea proposed by Xu and Prince [182] is Generalized Gradient Vector Flow.
The variety of features on the different scales of the VF makes their classification mathematically and computationally hard problem. Along with the critical points, the VF can be characterized by separatrices defined as the curves separating regions (basins) with the different behavior of the streamlines (see Scheuermann et al. [262]). Theisel et al. [255] classify separatices as 1) curves originating or/and ending at the critical point, 2) curves from inbound boundary switch points, and 3) isolated closed curves (Fig. 24).

left: inbound boundary switch point, second left: outboundary switch point, third left: separatrix from inbound boundary divides the domain into 3 regions, second right: isolated closed stream line divides the domain into regions, right: singular points and closed separatices in a complex stream
The separatrices from the boundary switch points have been analyzed by de Leeuw and van Liere [270]. Wischgoll and Scheuermann [271] and Theisel et al. [272] offer algorithms designed to detect closed separatrices. Skraba et al. [273, 274] propose a simplification of the VF based on the topological robustness, representing the stability of the critical points and their significance. Recent theoretical results on the existence and structure of separatrices have been compiled in Branner and Dias [275], Mol and Sánchez [276], and Novello et al. [277].
There exists a variety of the directional fields (DF). The classic VF specifies a magnitude and a direction, while others consider a single or multiple directions per point, often with symmetry. Such DF appear in the literature under several names, such as VF, DF, line fields, cross fields, poly-vector fields or tensor fields. Notable examples are the principal directions of a surface, stress/strain tensors or multiple cutting directions associated with the toolpath of a five-axis machine. Of a particular interest are the rotational-symmetric DF. Common variants are two directions with \(\pi\)-symmetry, four directions with \(\pi /2\)- symmetry, or two independent pairs of directions with \(\pi\)-symmetry within each pair (Vaxman et al. [94]). We recall that the index of singularity of the VF is the winding number of a small curve around the singularity. The Poincaré–Hopf theorem states that the sum of all the indices of a VF on a surface without boundary is \(2-2g\) where g is the genus of the surface. The concept of indices of singularities can be generalized to other types of DF. However, the index is not an integer anymore. For instance, the N-VF generates an index which is a multiple of 1/N (Ray et al. [278]).
Tensors of rank 2 are being used in various contexts relevant to differential geometry, engineering mechanics, dynamics, etc. The examples are curvature, metric, strain and stress. A tensor on a 2-manifold is a real-valued 2x2 matrix given in the local coordinates by
Symmetric tensors (\(T_{12} = T_{21}\)) are useful due to their straightforward relation to directional information. A symmetric matrix has either two distinctive real eigenvalues or a single eigenvalue corresponding to a double root of the characteristic polynomial. Since the eigenvectors are defined up to the sign, a rank-2 tensor field defines two orthogonal 2-DF. This representation is unique only when the eigenvalues \(\lambda _1 \ne \lambda _2\). Further, directional information is extracted from the so called traceless deviatoric part given by \(T-\textbf{Tr}(D)/2\). A special case of symmetric tensors which is particularly interesting for five-axis research is the structure tensors applied to represent 2-DF in an arbitrary dimension. The key idea is to represent a line L in \(R^n\) as the eigenspace of the largest eigenvector \(v_L\) of an \(n\times n\) matrix, where \(v_l\) parallel to L. The topology-based visualization of symmetric, second-order, planar tensor fields has been analyzed by Delmarcelle and Hesselink [157].
The method selects one DF corresponding to the minor or the major eigenvalue. This allows evaluation of the tensor lines considered as an extension of the classical stream lines. The foundations of this technique have been laid down by Helman and Hesselink [279]. The theoretical background is provided by the theory of dynamical systems and differential geometry The tensor approach results in a graph representation, where the edges are separatrices and the nodes are singularities of the tensor field. The tensor field is composed of curves everywhere tangent to the eigenvectors. Hence, these curves have no inherent orientation as opposed to stream lines. At a degenerate point, the deviator is the zero matrix. If the tensor field is linear these singularities are represented by trisectors and wedge points . Note that such structures would be impossible to detect in the oriented VF case. Delmarcelle and Hesselink [157] show how the standard VF configurations follow from the tensor field (Fig. 25).

left column: trisector and wedge(parabolic or hyperbolic), middle and right column: merging singular points into saddle, attracting/repelling node and focus
The technique proved to be suitable for tensor fields with a simple structure and has been used for TPG for five-axis machines (Fig. 5). Nevertheless, the VF/DF of the optimal (or possibly optimal) directions on a complex shaped STL surface create cluttered depictions that are of little help for interpretation. The topology of such fields includes a large number of features on different scales. For instance, a single directional flow on a small scale can be a part of a complex configuration such as a flow around a saddle or a trisector flow. The configurations depend on the method of classification and may result in a totally different decomposition. These shortcomings of VF simplification must be carefully considered when they are used for TPG for multi-axis machining. The algorithm should be able to prune insignificant features, driven by qualitative and quantitative criteria specific for the required surface, tool, speed and prescribed accuracy. The features can be understood in different ways and the corresponding VFs can be analyzed, simplified and decomposed using a variety of numerical algorithms.
Rights and permissions
About this article

Cite this article
Makhanov, S.S. Vector fields for five-axis machining. A survey. Int J Adv Manuf Technol 122, 533–575 (2022). https://doi.org/10.1007/s00170-022-09445-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-022-09445-0