
Abstract
In this paper, we consider a new coupled system of fractional boundary value problems based on the thermostat control model. With the help of fixed point theory, we investigate the existence criterion of the solution to the given coupled system. This property is proved by using the Krasnoselskii’s fixed point theorem and its uniqueness is proved via the Banach principle for contractions. Further, the Hyers–Ulam stability of solutions is investigated. Then, we find the approximate solution of the coupled fractional thermostat control system by using a numerical technique called the generalized differential transform method. To show the consistency and validity of our theoretical results, we provide two illustrative examples.
Similar content being viewed by others

1 Introduction
Fractional calculus is the most important field of applied mathematics that extends all existing integer-order operators to arbitrary-order ones. This importance is due to the high accuracy of fractional operators in modeling of many real-world phenomena in the context of different fractional boundary value problems. Some instances regarding applications of fractional differential equations (FDEqs) can be seen in various fields of science such as aerodynamics, physics, bioengineering, image processing, biochemistry viscoelasticity, biophysics, electrochemistry, mathematical biology, etc. (see [1–3]). In the last few decades, an extensive area of studies in relation to the existence/nonexistence theory of solutions to the aforementioned FDEqs has got much attention from mathematicians. Diverse results and theoretical findings can be followed in the literature regarding the existence theory for different structures of FDEqs; for more analysis and review, see [4–33]. Because of the modeling of most of the applied processes in the framework of coupled systems of arbitrary order FDEqs, many researchers have been focused on the establishment of the existence theory for such systems. In such a direction, plenty of research manuscripts can be observed in the literature, see [34–38]. Recently, Shah, Wang, Khalil, and Khan [39] devoted their focus to establishing some results on the following category of coupled systems of integral fractional boundary value problems (FBVPs) for FDEqs with movable boundary conditions (BCs) given as
in which \(f, g \in C(I \times [0,\infty ))\), \(1< \sigma \), \(\delta \leq 2\), and \(0< a\), \(b<1\). More recently, Alrabaiah et al. [40] implemented a qualitative study of a nonlinear system of coupled integral pantograph delay FDEqs as follows:
where \(1< \alpha _{1} , \alpha _{2} \leq 2\), \(0<\beta _{1} , \beta _{2}, a < 1\), \(f_{1} , f_{2} : \mathbb{I} \times \mathbb{R}^{3} \to \mathbb{R}\) are nonlinear and \(\psi : (0,1) \to [0, \infty )\) is bounded. In that work, Alrabaiah et al. proved, with the help of fixed point theorems, their desired results and then checked the Hyers–Ulam stability for the mentioned system [40].
In 2021, for the first time, Thabet et al. [41] formulated a new coupled system of three-point integral pantograph FDEqs in the context of the Caputo conformable operators as
where \({}^{ CC }\mathfrak{D}_{t_{0}}^{q, \eta _{j}}\) denotes the Caputo conformable derivatives of order \(\eta _{j} \in (1, 2) \) with \(q \in (0, 1]\) for \(j=1,2\), \({}^{ RC }\mathcal{I}_{t_{0}}^{q, \theta }\) is the RL-conformable integral of order \(\theta > 0 \), \(c, d \in (t_{0},T)\), \(a_{1} , a_{2}, b_{1}, b_{2}, m_{1}, m_{2} \in \mathbb{R} \), \(0<\lambda <1\), and \(f_{j} : [t_{0},T]\times \mathbb{R} \times \mathbb{R} \to \mathbb{R} \) are continuous for \(j=1,2\).
Other aspects in relation to the stability analysis and numerical methods to FDEqs have been investigated by many mathematicians in recent years. Most of the time, finding exact solutions to nonlinear BVPs is challenging and sometimes it is a difficult task. Hence, these issues motivated researchers to search for the best approximate solutions for given nonlinear BVPs. To achieve such an aim, mathematicians utilized different techniques and procedures like homotopy methods [42], q-homotopy analysis transform method [43], decomposition methods [44, 45], integral transform techniques [46], etc.
One of the strongest approaches to find numerical solutions to linear and nonlinear BVPs of FDEqs is the generalized differential transform method (GDT-method). In various papers, this transform has been applied to solve and analyze nonlinear BVPs of FDEqs for approximate solutions; see [47, 48]. Note that there is no classical standard method to analyze nonlinear BVPs of FDEqs for getting solutions explicitly. This is due to the complexity of fractional calculus involved in the supposed BVPs. Accordingly, a reliable method is needed to search for approximate solutions in the context of series in relation to the given FBVPs. On the other hand, it is also applicable if, along with the approximate solutions, their stability is investigated. That’s why analysis of the stability of existing FDEqs has received great attention. In other words, it gives a better result in different applications like optimization, economics, numerical analysis, physics, where obtaining the exact solution is a quite difficult task; see [49–51].
Amongst the important models of physio-electrical type, we choose and study a fractional model of thermostat control. A thermostat is a measurement tool that measures and regulates the temperature of an arbitrary physical system and takes actions subject to its temperature which is maintained near an appropriate and desired degree. This instrument is applied in any controlling devices and industrial systems, including building central heating, air conditioners, water heaters, ovens, refrigerators, car engines, and even medical incubators, which raise or decrease the temperature.
The study of the mathematical model of a thermostat control was implemented by Infante and Webb [52] in 2006, which is insulated at \(\mathfrak{t}=0\) via the controller at the time \(\mathfrak{t}=1\) and is given as
where \(b \in \mathbb{I}\) is a real constant and \(k > 0\). The performance of the thermostat is interpreted by this 2nd-order mathematical model in such a way that at the moment \(\mathfrak{t}=b\), the system’s heat is added or discharged based on the temperature detected by the existing sensors. Infante et al. analyzed some results on the solution’s existence for the suggested model by utilizing the fixed point index theory. In the next years, Nieto and Pimentel [53] transformed the above ordinary thermostat model to a new model of the fractional type as follows:
and extended the obtained results in the paper published by Infante et al. to the more general and accurate findings. Note that in that model, \({}^{c}\mathfrak{D}^{\gamma }\) is the Caputo derivative of order \(\gamma \in (1,2]\).
In this paper, we focus our intention on some qualitative aspects of possible solutions for a system of the coupled fractional thermostat model. In more precise words, we consider the following construction of a coupled thermostat model inspired by the model (1) as follows:
in which \(\sigma \in (1,2]\), \(\delta \in (1,2]\), \(0< \sigma -1 \leq 1\), \(0< \delta -1 \leq 1\), \(\mathfrak{b}, \mathfrak{c} \in (0,1)\), \(\mathfrak{p}, \mathfrak{q} > 0\), and \({}^{c}\mathfrak{D}^{1} = \frac{\mathrm{d}}{\mathrm{d}\mathfrak{t}}\). Along with these, the existing mappings \(K, M: \mathbb{I} \times \mathbb{R}^{\geq 0} \to \mathbb{R}^{\geq 0}\) are continuous and \({}^{c}\mathfrak{D}^{\varsigma }\) denotes the derivation operator of order \(\varsigma \in \{1, \sigma , \sigma -1 , \delta , \delta -1 \}\) in the sense of Caputo.
To prove the existence and uniqueness of solutions to the above coupled fractional system of thermostat control boundary value problems, we use the existing notions in fixed point theory. In other words, we use the Krasnoselskii’s fixed point theorem for proving the existence result, and we use the Banach contraction principle for establishing the uniqueness result. Also, the Hyers–Ulam stability of solutions of the coupled system (3) is investigated. For the first time, we find the approximate solutions of the coupled system of the nonlinear fractional boundary value problems arising in the thermostat control model (3) with the aid of some numerical algorithms based on the GDT-method. This leads to the novelty and originality of our research. The established findings are demonstrated by illustrating examples in this regard. We remark that this system is an applied model of a real process, and one can extend it to more general structures via integral multipoint BCs. The basic motivation of the current research is that we implement our numerical methods based on differential transforms to obtain approximate solutions of a new model of a mechanical instrument which is more applicable in different levels of engineering and this makes our findings useful and applicable.
The rest of the paper is arranged as follows: Primitive notions and relations are assembled in Sect. 2. Results regarding aspects of existence and uniqueness of solutions are derived in Sect. 3. Results regarding Hyers–Ulam stability criterion are proved in Sect. 4. Section 5 is devoted to introducing some algorithms of the GDT-method based on the existing system (3). Different cases are investigated in simulative examples (along with the relevant graphs) provided in Sect. 6. Lastly, Sect. 7 is devoted to conclusive remarks.
2 Primitive notions
As the notions of the Riemann–Liouville integral and Caputo derivative have a key task in our research, we provide them at this moment.
Definition 2.1
Let \(\sigma >0\). The σth Riemann–Liouville integral for a mapping \(x : [0, + \infty ) \to \mathbb{R}\) is defined by
if the integral’s value is finite.
Definition 2.2
Let \(k - 1 < \sigma < k\). For a continuous mapping \(x : \mathbb{R}^{\geq 0} \to \mathbb{R}\), the σth Riemann–Liouville derivation operator is defined by
if the integral’s value is finite.
Definition 2.3
Let \(k - 1 < \sigma < k\). For an absolutely continuous mapping x on \(\mathbb{R}^{\geq 0}\), the σth Caputo derivation operator is introduced as
if the integral’s value is finite.
Proposition 2.4
([1])
Let \(k-1 < \sigma < k\). Then \(\forall x \in C^{k-1} (0,\infty )\), the relation
holds for some \(\mathfrak{m}_{0} , \mathfrak{m}_{1} , \dots , \mathfrak{m}_{k-1} \in \mathbb{R}\).
3 Results of existence
We here compute and derive the equivalent system of coupled integral equations corresponding to the coupled thermostat control model (3) and, further, we present required criteria for the existence of solutions to the mentioned FBVP system (3).
It is a well-known notion that \(\mathfrak{B} = \{ x(\mathfrak{t}) : x(\mathfrak{t}) \in C(\mathbb{I}) \} \) is a Banach space when equipped with the norm \(\Vert x \Vert _{\mathfrak{B}} = \max_{\mathfrak{t} \in \mathbb{I}} \vert x ( \mathfrak{t}) \vert \). Consequently, \(\mathfrak{B} \times \mathfrak{B}\) will be a product Banach space which is equipped with norm \(\Vert (x , y ) \Vert _{\mathfrak{B} \times \mathfrak{B} } = \max \{ \Vert x \Vert _{\mathfrak{B}} , \Vert y \Vert _{\mathfrak{B}} \}\).
Proposition 3.1
Let \(\sigma \in (1,2]\), \(\sigma -1 \in (0,1]\), \(\mathfrak{b} \in (0,1)\), \(\mathfrak{p} > 0\), and \(g \in C_{\mathbb{R}}(\mathbb{I})\). A function \(x^{*} \), which a solution to the linear thermostat model
is given by the integral equation
Proof
If \(x^{*}\) satisfies the fractional thermostat linear equation (4), then \({}^{c}\mathfrak{D}^{\sigma }x^{*}(\mathfrak{t}) + g (\mathfrak{t}) =0\) holds. By integrating the latter equation and by virtue of \(1 < \sigma \leq 2\), we get
in which it is necessary that we find coefficients \(\mathfrak{m}_{0}, \mathfrak{m}_{1}\in \mathbb{R}\). On the other hand, the properties of the Caputo derivative yield
and
Using the condition \({}^{c}\mathfrak{D}^{1} x(0)=0\) and (7), we figure out that \(\mathfrak{m}_{1} = 0\). Moreover, the equations (6), (8), and the condition \(\mathfrak{p} {}^{c}\mathfrak{D}^{ \sigma -1}x(1)+ x( \mathfrak{b} ) = 0\) imply that
and thus we reach
At last, we substitute the obtained coefficients \(\mathfrak{m}_{0}\) and \(\mathfrak{m}_{1}\) into (6), and so (6) becomes
thus, this argument is finished. □
With due attention to the above proposition, we can formulate here an equivalent structure of coupled integral equations to the investigated system of coupled BVPs for the fractional thermostat model (3) in the next proposition.
Proposition 3.2
Let \(\sigma \in (1,2]\), \(\delta \in (1,2]\), \(\sigma -1 \in (0,1]\), \(\delta -1 \in (0,1]\), \(\mathfrak{b}, \mathfrak{c} \in (0,1)\), \(\mathfrak{p}, \mathfrak{q} > 0\), and \(K, M \in C_{\mathbb{R}^{\geq 0}}(\mathbb{I} \times \mathbb{R}^{\geq 0})\). Then an equivalent configuration of the system of coupled BVPs of the fractional thermostat model
is provided by the coupled integral equations
for any \(\mathfrak{t} \in \mathbb{I}\).
Thanks to the above proposition and for the sake of our subsequent arguments, we aim to introduce two operators \(g_{1}: \mathfrak{B} \to \mathfrak{B}\) and \(g_{2}: \mathfrak{B} \to \mathfrak{B}\) which take forms
and
So, we find the system of coupled operator equations in a format as follows:
Hence, on the product space, we define \(g^{\star }:\mathfrak{B}\times \mathfrak{B}\longrightarrow \mathfrak{B}\times \mathfrak{B}\) as \(g^{\star }( x,y)=(g_{1} y,g_{2} x)\). In the sequel, we deal with the fixed points of \(g^{\star }\). For this we exploit Banach’s and Krasnoselskii’s fixed point theorems.
Theorem 3.3
([55])
Let \(\mathcal{X}\) be a nonempty complete metric space and \(\varPsi : \mathcal{X} \rightarrow \mathcal{X}\) a contraction mapping. Then we can find a unique point \(z\in \mathcal{X} \) with \(\varPsi (z)=z\).
Theorem 3.4
([55])
Let \(\varSigma \neq \emptyset \) be a bounded, closed and convex set in a Banach space \(\mathcal{X}\). Suppose that \(g_{1},g_{2} :\varSigma \rightarrow \mathcal{X}\) are two operators such that
-
(i)
\(g_{1}(x)+g_{2}(y)\in \varSigma \), \(\forall x,y\in \varSigma \),
-
(ii)
\(g_{1}\) is a contraction mapping,
-
(iii)
\(g_{2}\) is compact and continuous.
Then there exists \(z\in \varSigma \) such that \(z=g_{1}z+g_{2}z\).
Now, in relation to the proofs of the main theorems, the following hypotheses are needed:
-
(H1)
\(K, M: \mathbb{I} \times \mathbb{R}^{\geq 0} \to \mathbb{R}^{\geq 0}\) are continuous, for \(\mathfrak{t}\in \mathbb{I}\) and \(x,\widehat{x},y,\widehat{y}\in \mathbb{R}\).
-
(H2)
\(\exists 0<\mathbf{C}_{K} \in \mathbb{R}\) which satisfies
$$\begin{aligned} \bigl\vert K(\mathfrak{t},x)-K(\mathfrak{t},\widehat{x}) \bigr\vert &\leq \mathbf{C}_{K} \vert x-\widehat{x} \vert , \end{aligned}$$for \(\mathfrak{t}\in \mathbb{I}\) and \(x,\widehat{x}\in \mathbb{R}\).
-
(H3)
There exists a real positive constant \(\mathbf{C}_{M} \) which satisfies
$$\begin{aligned} \bigl\vert M(\mathfrak{t},y)-M(\mathfrak{t},\widehat{y}) \bigr\vert &\leq \mathbf{C}_{M} \vert y-\widehat{y} \vert , \end{aligned}$$for \(\mathfrak{t}\in \mathbb{I}\) and \(y,\widehat{y}\in \mathbb{R}\).
The following notations are used for convenience of calculations:
Now, everything is ready to start the establishment of the first main theorem.
Theorem 3.5
Assume (H1)–(H3) along with the assumptions \(\mathbf{C}_{K} \delta _{1} <1\) and \(\mathbf{C}_{M} \delta _{2} <1\) are fulfilled. Then the considered system of coupled BVPs for the fractional thermostat model (3) admits a unique solution.
Proof
First, let us choose
where \(\theta _{1}=\max_{\mathfrak{t}\in \mathbb{I}} |K(\mathfrak{t},0) |\) and \(\theta _{2}=\max_{\mathfrak{t}\in \mathbb{I}} |M(\mathfrak{t},0) |\), and set
which is bounded, closed, and convex. Let \((x, y)\in \varXi \), then, in view of (H1) and (H2), we can write
Therefore,
In a similar way, we show that
Thus,
Hence, from (14) and (15), it follows that
Hence \(g^{\star } (\varXi ) \subseteq \varXi \).
Now, we show that \(g^{\star }\) is a contraction operator. Let \((x,y), (\widehat{x},\widehat{y})\in \varXi \) and \(t\in \mathbb{I}\), then we have
Then, (16) leads to
By the same calculation techniques used to get (16), we find
Now, by exploiting (17) and (18), together with the assumptions \(\mathbf{C}_{K}\delta _{1}<1\) and \(\mathbf{C}_{M}\delta _{2}<1\), we arrive at
Hence, \(g^{\star }\) is a contraction operator. Then, from Theorem 3.3, our system of coupled BVPs for the fractional thermostat model (3) admits a uniqu solution, and this ends the proof. □
To follow the required arguments, we define four new operators as follows:
From the system (19), it follows that \(g_{1}=\widehat{\Phi }_{1}+\widehat{\Psi }_{1}\) and \(g_{2}=\widehat{\Phi }_{2}+\widehat{\Psi }_{2}\), therefore the operator \(g^{\star }\) can be rewritten as \(g^{\star }=\widehat{\Phi }+\widehat{\Psi }\), in which Φ̂ and Ψ̂ are expressed as follows:
In addition, we suppose that the following hypothesis holds:
-
(H4)
There are four real positive constants \(\varUpsilon _{K}\), \(\varUpsilon _{M}\), \(\varOmega _{K}\), \(\varOmega _{M}\) that satisfy
$$ \bigl\vert K\bigl(t,y(t)\bigr) \bigr\vert \leq \varUpsilon _{K} \Vert y \Vert _{\mathfrak{B}}+ \varOmega _{K}{} \quad \text{and} \quad \bigl\vert M\bigl(t,x(t)\bigr) \bigr\vert \leq \varUpsilon _{M} \Vert x \Vert _{\mathfrak{B}}+\varOmega _{M}, $$for each \(t\in \mathbb{I}\) and any \(x,y\in \mathfrak{B} \).
Theorem 3.6
Let the hypotheses (H1)–(H4) be satisfied. If, in addition, the conditions
hold, then the considered system of coupled BVPs for the fractional thermostat model (3) admits a solution.
Proof
Since K and M are continuous functions, then we have the same for the operator \(g^{\star }\). Let \(\mathbb{D}\) be a bounded subset of \(\varXi \in \mathfrak{B}\times \mathfrak{B}\). Then, based on the hypothesis (H4), we have, for all \((x,y)\in \mathbb{D}\),
which leads to
A similar argument gives us
In view of (21) and (22), the boundedness of \(\widehat{\Phi }(\mathbb{D})\) is ensured.
Now, we show that Φ̂ is an equicontinuous operator. For this, let \(\tau _{1},\tau _{2}\in \mathbb{I,}\) where \(\tau _{1}<\tau _{2}\) and \((x,y)\in \mathfrak{B}\times \mathfrak{B} \), then we have
By the same arguments used to get (23), one can find the following result:
The inequalities (23) and (24) imply that \(|\widehat{\Phi }_{1}y(\tau _{1})-\widehat{\Phi }_{1}y(\tau _{2}) |\rightarrow 0\) and \(|\widehat{\Phi }_{2}x(\tau _{1})-\widehat{\Phi }_{2}x(\tau _{2}) |\rightarrow 0\), when \(\tau _{1}\rightarrow \tau _{2}\). Then, by using the Arzela–Ascoli theorem, we conclude that the operator Φ̂ is continuous and compact.
Now, to complete checking the hypotheses of Theorem 3.4, it remains to show that Ψ̂ is a contraction operator. So, if we take \((y,\widehat{y})\in \mathfrak{B}\times \mathfrak{B}\), we get
Consequently,
With the same calculation method, we arrive at the following estimate:
Hence, from (25) and (26), together with the assumption (20), we have that Ψ̂ is a contraction operator. Now, all the assumptions of Theorem 3.4 are fulfilled. So, this ensures that \(g^{\star }\) admits at least one fixed point which is also a solution of the considered system of coupled BVPs for the fractional thermostat model (3). □
4 Results for Hyers–Ulam stability
Fractional differential equations have been extensively studied from different angles. Among these, stability analysis in the Hyers–Ulam sense is an important aspect that gained proper attention from researchers [56–58]. Based on the fundamental definition of Hyers–Ulam stability of a system, the notion was later modified to more general types, and their results were successfully applied to various problems [59–61]. In this section, we will adopt a number of sufficient conditions to review the Hyers–Ulam-type stability results for the considered system of coupled BVPs for the fractional thermostat model (3).
Definition 4.1
Let \(g^{\star }:\mathfrak{B}\longrightarrow \mathfrak{B}\) be an operator, where \(\mathfrak{B}\) is a Banach space. We say that the operator equation
is Hyers–Ulam stable if for the given inequality \((\forall \mathfrak{t}\in \mathbb{I})\)
\(\exists \omega _{g^{\star }}>0\) so that for any \(y\in C(\mathbb{I},\mathbb{R})\) satisfying equation (27), one can find the solution \(\widehat{h}\in C(\mathbb{I},\mathbb{R})\) of (27) uniquely, provided that \(\forall \mathfrak{t}\in \mathbb{I}\),
Definition 4.2
Let us consider two operators \(g_{j}:\mathfrak{B}\longrightarrow \mathfrak{B}\), \(j\in \{1,2\}\). Based on Definition 4.1, we say that the coupled system
is Hyers–Ulam-stable if for the following systems of inequalities:
one can find two positive constants \(\omega _{g_{1}}\), \(\omega _{g_{2}}\) so that for each \((x,y)\) satisfying (28), a solution \((\widehat{h},\widetilde{h})\) of above system (28) exists uniquely, provided that \(\forall \mathfrak{t}\in \mathbb{I}\),
For establishing the formal theorems on the Hyers–Ulam stability for the considered system of coupled BVPs of the fractional thermostat model (3), we indicate the following conditions first.
Remark 4.3
Suppose that \(\exists \varphi , \chi \in C(\mathbb{I},\mathbb{R})\) which depend on x and y, respectively, and satisfy
and
\(\forall \mathfrak{t} \in \mathbb{I}\).
Lemma 4.4
Assume that \((x,y)\in (C(\mathbb{I},\mathbb{R}) )^{2}\) is a solution of the inequality system (29). Then we have the following system of inequalities:
where \(\eta _{1}= \frac{1+b^{\sigma }+ \mathfrak{p} \Gamma (\sigma +1)}{\Gamma (\sigma +1)}\), \(\eta _{2}= \frac{1+c^{\delta }+ \mathfrak{q} \Gamma (\delta +1)}{\Gamma (\delta +1)}\), and \(g_{1}\), \(g_{2}\) are the operators defined by (11) and (12), respectively.
Proof
In accordance with (2) in Remark 4.3, we have \(\forall \mathfrak{t} \in \mathbb{I}\),
Thanks to the Proposition 3.2, the solution of problem (30) can be reformulated immediately as
Since \(\mathfrak{t} \in \mathbb{I} := [0,1]\), from (31) we have, on the one hand,
which means that
On the other hand, with the same arguments, we obtain
that is,
and this concludes the proof. □
Theorem 4.5
Assume that the hypotheses (H2), (H3) hold. If
where \(\delta _{1} \delta _{2} C_{K} C_{M}<1\), then the solution of the system of coupled BVPs of the fractional thermostat model (9) is Hyers–Ulam-stable.
Proof
Taking any solution \((x,y)\in (C(\mathbb{I},\mathbb{R}) )^{2}\) of the system of inequalities defined by
and the unique solution \((\widehat{h},\widetilde{h}) \) belonging to \((C(\mathbb{I},\mathbb{R}) )^{2}\) of the following system:
and from Proposition 3.2, together with (10), the solution of (32) can be represented by
In view of (33), we can write
Exploiting Lemma 4.4, with some computations, we obtain
With the same calculation, we get
So
Since \(\delta _{1} \delta _{2} C_{K} C_{M}<1\), from (35), (36), and (37), we get, after simple computations, the following estimates:
which give
Hence the solution of the system of coupled BVPs of the fractional thermostat model (9) is Hyers–Ulam-stable. □
5 GDT-method for approximation of solutions
In many situations, the explicit solution of boundary problems for classical nonlinear differential equations is difficult and sometimes impossible. Then, it would be quite difficult or impossible to find the exact solutions of FBVPs with FDEqs. Therefore, it has become necessary to think about new methods to solve such problems. In this work we are interested in a numerical method, called the differential transform method, which was presented by Zhou in [62], which was extended to its generalized form by Odibat and Momani in [63] and named the GDT-method. It is an iterative method which gives us analytical solutions in the form of the Taylor series expansion to fractional differential equations with boundary or initial conditions. Now, we will apply the GDT-method to find an approximate solution to our system of coupled BVPs of the fractional thermostat model (3). Note that this technique is based on the generalized Taylor’s formula. The GDT of the \(\mathfrak{s}\)th derivative of two given functions \(x(\mathfrak{t})\) and \(y(\mathfrak{t})\) of one variable is defined by (see [64])
where \(({}^{c}\mathfrak{D}^{\varrho } )^{\mathfrak{s}}= \underbrace{{}^{c}\mathfrak{D}^{\varrho }\cdot {}^{c}\mathfrak{D}^{\varrho }\cdots {}^{c}\mathfrak{D}^{\varrho }}_{ \mathfrak{ s}\text{-times}}\); and their inverses are defined as
Then the approximate solution of our problem (3) is written as finite series of the analytical polynomial forms,
where ϱ is named the order of the differential transformation and must be taken such that \(\mathfrak{l}\varrho =1\), \(\mathfrak{m}\varrho =\sigma \), and \(\mathfrak{n}\varrho =\delta \) with \(\mathfrak{l},\mathfrak{m},\mathfrak{n}\in \mathbb{N,}\) and \(x^{\star }(\mathfrak{s})\), \(y^{\star }(\mathfrak{s})\) are the GDT of \(x(\mathfrak{t})\) and \(y(\mathfrak{t})\), respectively, expressed by
where \(K^{\star }(\mathfrak{s},y^{\star }(\mathfrak{s}))\) and \(M^{\star }(\mathfrak{s},x^{\star }(\mathfrak{s}))\) denote the ϱth-order differential transformations of \(K(\mathfrak{s},y(\mathfrak{ s}))\) and \(M(s,x(\mathfrak{ s}))\), respectively.
Since \({}^{c}\mathfrak{D}^{1} x(0)=0\) and \({}^{c}\mathfrak{D}^{1} y(0)=0\), their differential transforms give \(x^{\star }(\mathfrak{ l})=0\), \(y^{\star }(\mathfrak{ l})=0\), and \(x^{\star }(\mathfrak{s})=0\), for all \(\mathfrak{s}\) that satisfy \(0<\mathfrak{s}\varrho <1\) or \(l<\mathfrak{s}<\mathfrak{m}\), and also \(y^{\star }(\mathfrak{s})=0\), for all \(\mathfrak{s}\) that satisfy \(0<\mathfrak{s}\varrho <1\) or \(l<\mathfrak{s}<\mathfrak{n}\), and finally, \(x^{\star }(0)=\widehat{c}\), \(y^{\star }(0)=\widetilde{c}\), where ĉ and c̃ are two undetermined real constants which can be evaluated using the second initial condition of problem (3).
Thanks to the recursive relationship (40), the solution \((x(\mathfrak{t}),y(\mathfrak{t}))\) of the system of coupled BVPs of the fractional thermostat model (3) can be written as the following finite series:
where \(x_{\widehat{c},\widetilde{c}}^{\star }(\mathfrak{s})\), \(y_{\widehat{c},\widetilde{c}}^{\star }(\mathfrak{s})\) are coefficients depending on ĉ and c̃ which can be determined using the second initial condition of problem (3).
From (41), we can write
Therefore (42) gives us the following system of equations:
Now, we solve (43) with respect to ĉ and c̃ and replace their values in (41), and ultimately we find our desired approximate solution of the system of coupled BVPs of the fractional thermostat model (3).
6 Some simulative examples
Example 6.1
Consider the following system of coupled BVPs of the fractional thermostat model:
In this example, we have \(\sigma =\frac{5}{4}\), \(\delta =\frac{3}{2}\), \(\mathfrak{p}=10\), \(\mathfrak{q}=8\), and
Then,
So, \(C_{K}=\frac{2}{25}\) and \(C_{M}=\frac{1}{\pi ^{2}}\). We have also
It is simple to check that for all \(0< \mathfrak{b}\), \(\mathfrak{c} < 1\), we have \(C_{K}\delta _{1}<1\) and \(C_{M}\delta _{2}<1\). Now, all the assumptions of Theorem 3.5 are fulfilled. Consequently, the system of coupled BVPs of the fractional thermostat model (6.1) admits a unique solution.
Now, we are looking for an approximate solution to the problem (6.1) by GDT-method. For this, we choose \(\varrho =\frac{1}{4}\), which gives immediately \(\mathfrak{n}=6\), \(\mathfrak{m}=5\), and \(\mathfrak{l}=4\).
By applying the recursive relation (40) to the given FBVP (6.1), we arrive at
Then we get the following initial conditions:
In view of (43), we find
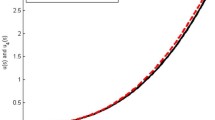
Now we will calculate various approximate solutions of our system of coupled BVPs of the fractional thermostat model (6.1) by changing the values of parameters \(\mathfrak{b}\) and \(\mathfrak{c}\). In this case, one can see the obtained approximate solutions in Fig. 1 graphically.

Graphs of the approximate solution \((x, y)\) of the system of coupled BVPs of the fractional thermostat model (6.1) for different parameters \(\mathfrak{b}\) and \(\mathfrak{c}\)
First case: \(\mathfrak{b}=\frac{1}{2}\), \(\mathfrak{c}=\frac{1}{3}\).
By using the recursive algorithm (45) truncated at \(\mathfrak{s}=10\) and after calculating constants ĉ and c̃ from (46), we obtain the approximate solution \((x(\mathfrak{t}),y(\mathfrak{t}))\) for the system of coupled BVPs of the fractional thermostat model (6.1) such that
Second case: \(\mathfrak{b}=\frac{3}{5}\), \(\mathfrak{c}=\frac{4}{5}\).
The approximate solution \((x(\mathfrak{t}),y(\mathfrak{t}))\) for the system of coupled BVPs of the fractional thermostat model (6.1) is given by
Third case: \(\mathfrak{b}=\frac{1}{6}\), \(\mathfrak{c}=\frac{1}{5}\).
The approximate solution \((x(\mathfrak{t}),y(\mathfrak{t}))\) for the system of coupled BVPs of the fractional thermostat model (6.1) is given by
Fourth case: \(\mathfrak{b}=\frac{1}{5}\), \(\mathfrak{c}=\frac{1}{6}\).
The approximate solution \((x(\mathfrak{t}),y(\mathfrak{t}))\) for the system of coupled BVPs of the fractional thermostat model (6.1) is given by
Remark 6.2
Note that \((0,0)\) is the unique solution of the system of coupled BVPs of the fractional thermostat model (6.1). On the other hand, we can show that the approximate solution \((x, y)\) obtained in (47) by the GDT-method for all \(\mathfrak{t}\in (0,1)\) satisfies the hypotheses of Theorem 4.5. Therefore \((x, y)\) is Hyers–Ulam stable. We have the same results for \((x, y)\) obtained in (48), (49), and (50).
Example 6.3
Consider the following system of coupled BVPs of the fractional thermostat model:
In the present example, we have \(\sigma =\delta =\frac{5}{4}\), \(\mathfrak{p}=15\), \(\mathfrak{q}=20\), and
Then, \(C_{K}=\frac{1}{20}\), and \(C_{M}=\frac{1}{3\pi ^{2}}\). We have also
and
Therefore, Theorem 3.5 ensured that the system of coupled BVPs (6.3) has a unique solution. By the same arguments used in Example 6.1, we find the approximate solutions \((x,y)\) of the system of coupled BVPs of the fractional thermostat model (6.3) by the GDT-method as follows:
First case: \(\mathfrak{b}=\frac{1}{3}\), \(\mathfrak{c}=\frac{1}{4}\).
The approximate solution \((x(\mathfrak{t}),y(\mathfrak{t}))\) for the system of coupled BVPs of the fractional thermostat model (6.3) is given by
Second case: \(\mathfrak{b}=\frac{1}{4}\), \(\mathfrak{c}=\frac{1}{3}\).
The approximate solution \((x(\mathfrak{t}),y(\mathfrak{t}))\) for the system of coupled BVPs of the fractional thermostat model (6.3) is given by
Third case: \(\mathfrak{b}=\frac{1}{5}\), \(\mathfrak{c}=\frac{1}{6}\).
The approximate solution \((x(\mathfrak{t}),y(\mathfrak{t}))\) for the system of coupled BVPs of the fractional thermostat model (6.3) is given by
Fourth case: \(\mathfrak{b}=\frac{1}{6}\), \(\mathfrak{c}=\frac{1}{5}\).
The approximate solution \((x(\mathfrak{t}),y(\mathfrak{t}))\) for the system of coupled BVPs of the fractional thermostat model (6.3) is given by
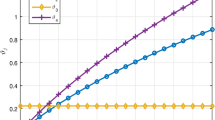
By changing the values of parameters \(\mathfrak{b}\) and \(\mathfrak{c}\) as above, one can see the obtained approximate solutions in Fig. 2 graphically.

Graphs of the approximate solution \((x, y)\) of the system of coupled BVPs of the fractional thermostat model (6.3) for different parameters \(\mathfrak{b}\) and \(\mathfrak{c}\)
Remark 6.4
Now we simulate schemes for some different values of parameters \(\mathfrak{b}\) and \(\mathfrak{c}\) and calculate the absolute difference in the boundary conditions to test the correctness of results using the following expressions:
In this case, the absolute difference in the boundary conditions for different choices of \(\mathfrak{b}\) and \(\mathfrak{c}\) and different scale level \(\mathfrak{s}\) are presented in Tables 1–4.
7 Conclusion
In this work some existence and uniqueness results have been obtained by using the Banach and Krasnoselskii’s fixed point theorems. Also some necessary conditions for Hyers–Ulam stability of solutions of a given system of coupled BVPs of the fractional thermostat model (3) have been discussed. In addition, some approximate solutions by the GDT-method have been found, and some illustrative examples have been presented as applications of the GDT-method on some problems as in (3). These examples show that this numerical method can give us a good and accurate approximate solution for nonlinear FBVP of FDEqs. In the next works, we are going to implement such an analysis (theoretical and numerical) for other nonlinear fractional systems of FDEqs arising in different applied models featuring generalized fractional operators.
Availability of data and materials
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
References
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Applications of Fractional Differential Equations. Elsevier, Amsterdam (2006)
Samko, S.G., Kilbas, A.A., Marichev, O.I.: Fractional Integrals and Derivatives: Theory and Applications. Gordon & Breach, Yverdon (1993)
Miller, K.S., Ross, B.: An Introduction to the Fractional Calculus and Fractional Differential Equations. Wiley, New York (1993)
Baleanu, D., Mousalou, A., Rezapour, S.: A new method for investigating approximate solutions of some fractional integro-differential equations involving the Caputo-Fabrizio derivative. Adv. Differ. Equ. 2017, 51 (2017). https://doi.org/10.1186/s13662-017-1088-3
Baleanu, D., Etemad, S., Rezapour, S.: A hybrid Caputo fractional modeling for thermostat with hybrid boundary value conditions. Bound. Value Probl. 2020, 64 (2020). https://doi.org/10.1186/s13661-020-01361-0
Rezapour, S., Imran, A., Hussain, A., Martinez, F., Etemad, S., Kaabar, M.K.A.: Condensing functions and approximate endpoint criterion for the existence analysis of quantum integro-difference FBVPs. Symmetry 13(3), 469 (2021). https://doi.org/10.3390/sym13030469
Adiguzel, R.S., Aksoy, U., Karapinar, E., Erhan, I.M.: On the solution of a boundary value problem associated with a fractional differential equation. Math. Methods Appl. Sci. (2020). https://doi.org/10.1002/mma.6652
Adiguzel, R.S., Aksoy, U., Karapinar, E., Erhan, I.M.: On the solutions of fractional differential equations via Geraghty type hybrid contractions. Appl. Comput. Math. Int. J. 20(2), 313–333 (2021)
Marasi, H., Afshari, H., Zhai, C.B.: Some existence and uniqueness results for nonlinear fractional partial differential equations. Rocky Mt. J. Math. 47(2), 571–585 (2017). https://doi.org/10.1216/RMJ-2017-47-2-571
Afshari, H., Gholamyan, H., Zhai, C.B.: New applications of concave operators to existence and uniqueness of solutions for fractional differential equations. Math. Commun. 25(1), 157–169 (2020)
Matar, M.M.: Existence of solution for fractional neutral hybrid differential equations with finite delay. Rocky Mt. J. Math. 50(6), 2141–2148 (2020). https://doi.org/10.1216/rmj.2020.50.2141
Mohammadi, H., Kumar, S., Rezapour, S., Etemad, S.: A theoretical study of the Caputo–Fabrizio fractional modeling for hearing loss due to Mumps virus with optimal control. Chaos Solitons Fractals 144, 110668 (2021). https://doi.org/10.1016/j.chaos.2021.110668
Boucenna, D., Boulfoul, A., Chidouh, A., Ben Makhlouf, A., Tellab, B.: Some results for initial value problem of nonlinear fractional equation in Sobolev space. J. Appl. Math. Comput. (2021). https://doi.org/10.1007/s12190-021-01500-5
Aydogan, S.M., Baleanu, D., Mousalou, A., Rezapour, S.: On high order fractional integro-differential equations including the Caputo-Fabrizio derivative. Bound. Value Probl. 2018, 90 (2018). https://doi.org/10.1186/s13661-018-1008-9
Bachir, F.S., Abbas, S., Benbachir, M., Benchora, M.: Hilfer–Hadamard fractional differential equations; existence and attractivity. Adv. Theory Nonlinear Anal. Appl. 5(1), 49–57 (2021). https://doi.org/10.31197/atnaa.848928
Rezapour, S., Ntouyas, S.K., Iqbal, M.Q., Hussain, A., Etemad, S., Tariboon, J.: An analytical survey on the solutions of the generalized double-order ϕ-integro-differential equation. J. Funct. Spaces 2021, Article ID 6667757 (2021). https://doi.org/10.1155/2021/6667757
Abdeljawad, T., Agarwal, R.P., Karapinar, E., Kumari, P.S.: Solutions of the nonlinear integral equation and fractional differential equation using the technique of a fixed point with a numerical experiment in extended b-metric space. Symmetry 11(5), 686 (2019). https://doi.org/10.3390/sym11050686
Baleanu, D., Jajarmi, A., Mohammadi, H., Rezapour, S.: A new study on the mathematical modelling of human liver with Caputo–Fabrizio fractional derivative. Chaos Solitons Fractals 134, 109705 (2020). https://doi.org/10.1016/j.chaos.2020.109705
Boutiara, A., Guerbati, K., Benbachir, M.: Caputo–Hadamard fractional differential equation with three-point boundary conditions in Banach spaces. AIMS Math. 5(1), 259–272 (2019). https://doi.org/10.3934/math.2020017
Karapinar, E., Fulga, A., Rashid, M., Shahid, L., Aydi, H.: Large contractions on quasi-metric spaces with an application to nonlinear fractional differential equations. Mathematics 7(5), 444 (2019). https://doi.org/10.3390/math7050444
Alqahtani, B., Aydi, H., Karapinar, E., Rakocevic, V.: A solution for Volterra fractional integral equations by hybrid contractions. Mathematics 7(8), 694 (2019). https://doi.org/10.3390/math7080694
Ravichandran, C., Logeswari, K., Jarad, F.: New results on existence in the framework of Atangana–Baleanu derivative for fractional integro-differential equations. Chaos Solitons Fractals 125, 194–200 (2019). https://doi.org/10.1016/j.chaos.2019.05.014
Panda, S.K., Ravichandran, C., Hazarika, B.: Results on system of Atangana–Baleanu fractional order Willis aneurysm and nonlinear singularity perturbed boundary value problems. Chaos Solitons Fractals 142, 110390 (2021). https://doi.org/10.1016/j.chaos.2020.110390
Baleanu, D., Mousalou, A., Rezapour, S.: On the existence of solutions for some infinite coefficient-symmetric Caputo-Fabrizio fractional integro-differential equations. Bound. Value Probl. 2017, 145 (2017). https://doi.org/10.1186/s13661-017-0867-9
Jothimani, K., Valliammal, N., Ravichandran, C.: Existence result for a neutral fractional integro-differential equation with state dependent delay. J. Appl. Nonlinear Dyn. 7(4), 371–381 (2018). https://doi.org/10.5890/JAND.2018.12.005
Valliammal, N., Ravichandran, C.: Results on fractional neutral integro-differential systems with state-dependent delay in Banach spaces. Nonlinear Stud. 25(1), 159–171 (2018)
Ravichandran, C., Trujillo, J.J.: Controllability of impulsive fractional functional integro-differential equations in Banach spaces. J. Funct. Spaces 2013, Article ID 812501 (2013). https://doi.org/10.1155/2013/812501
Baleanu, D., Rezapour, S., Saberpour, Z.: On fractional integro-differential inclusions via the extended fractional Caputo-Fabrizio derivation. Bound. Value Probl. 2019, 79 (2019). https://doi.org/10.1186/S13661-019-1194-0
Karapinar, E., Fulga, A.: An admissible hybrid contraction with an Ulam type stability. Demonstr. Math. 52, 428–436 (2019). https://doi.org/10.1515/dema-2019-0037
Jleli, M., Karapinar, E., Samet, B.: Positive solutions for multipoint boundary value problems for singular fractional differential equations. J. Appl. Math. 2014, Article ID 596123 (2014). https://doi.org/10.1155/2014/596123
Aksoy, U., Karapinar, E., Erhan, I.: Fixed points of generalized α-admissible contractions on b-metric spaces with an application to boundary value problems. J. Nonlinear Convex Anal. 17(6), 1095–1108 (2016)
Krim, S., Abbas, S., Benchohra, M., Karapinar, E.: Terminal value problem for implicit Katugampola fractional differential equations in b-metric spaces. J. Funct. Spaces 2021, Article ID 5535178 (2021). https://doi.org/10.1155/2021/5535178
Baleanu, D., Mohammadi, H., Rezapour, S.: Analysis of the model of HIV-1 infection of CD4+ T-cell with a new approach of fractional derivative. Adv. Differ. Equ. 2020, 71 (2020). https://doi.org/10.1186/s13662-020-02544-w
Shah, K., Khan, R.A.: Iterative scheme for a coupled system of fractional-order differential equations with three-point boundary conditions. Math. Methods Appl. Sci. 41(3), 1047–1053 (2018). https://doi.org/10.1002/mma.4122
Shah, K., Khalil, H., Khan, R.A.: Investigation of positive solution to a coupled system of impulsive boundary value problems for nonlinear fractional order differential equations. Chaos Solitons Fractals 77, 240–246 (2015). https://doi.org/10.1016/j.chaos.2015.06.008
Ardjouni, A., Lachouri, A., Djoudi, A.: Existence and uniqueness results for nonlinear hybrid implicit Caputo–Hadamard fractional differential equations. Open J. Math. Anal. 3(2), 106–111 (2019). https://doi.org/10.30538/psrp-oma2019.0044
Matar, M.M.: Approximate controllability of fractional nonlinear hybrid differential systems via resolvent operators. J. Math. 2019, Article ID 8603878 (2019). https://doi.org/10.1155/2019/8603878
Wang, J., Feckan, M., Zhou, Y.: Fractional order differential switched systems with coupled nonlocal initial and impulsive conditions. Bull. Sci. Math. 141(7), 727–746 (2017). https://doi.org/10.1016/j.bulsci.2017.07.007
Shah, K., Wang, J., Khalil, H., Khan, R.A.: Existence and numerical solutions of a coupled system of integral BVP for fractional differential equations. Adv. Differ. Equ. 2018, 149 (2018). https://doi.org/10.1186/s13662-018-1603-1
Alrabaiah, H., Ahmad, I., Shah, K., Ur Rahman, G.: Qualitative analysis of nonlinear coupled pantograph differential equations of fractional order with integral boundary conditions. Bound. Value Probl. 2020, 138 (2020). https://doi.org/10.1186/s13661-020-01432-2
Thabet, S.T.M., Etemad, S., Rezapour, S.: On a coupled Caputo conformable system of pantograph problems. Turk. J. Math. 45(1), 496–519 (2021). https://doi.org/10.3906/mat-2010-70
He, J.H.: Homotopy perturbation method for solving boundary value problems. Phys. Lett. A 350(1–2), 87–88 (2006). https://doi.org/10.1016/j.physleta.2005.10.005
Kumar, D., Singh, J., Baleanu, D.: A new numerical algorithm for fractional Fitzhugh–Nagumo equation arising in transmission of nerve impulses. Nonlinear Dyn. 91, 307–317 (2018). https://doi.org/10.1007/s11071-017-3870-x
Daftardar-Gejji, V., Jafari, H.: Adomian decomposition: a tool for solving a system of fractional differential equations. J. Math. Anal. Appl. 301(2), 508–518 (2005). https://doi.org/10.1016/j.jmaa.2004.07.039
Rezapour, S., Etemad, S., Tellab, B., Aarwal, P., Guirao, J.L.G.: Numerical solutions caused by DGJIM and ADM methods for multi-term fractional BVP involving the generalized ψ-RL-operators. J. Math. Anal. Appl. 13(4), 532 (2021). https://doi.org/10.3390/sym13040532
Naghipour, A., Manafian, J.: Application of the Laplace Adomian decomposition and implicit methods for solving Burger’s equation. TWMS J. Pure Appl. Math. 6(1), 68–77 (2015)
Arikoglu, A., Ozkol, I.: Solutions of integral and integro-differential equation systems by using differential transform method. Comput. Math. Appl. 56(9), 2411–2417 (2008). https://doi.org/10.1016/j.camwa.2008.05.017
Arikoglu, A., Ozkol, I.: Solution of fractional integro-differential equations by using fractional differential transform method. Chaos Solitons Fractals 40(2), 521–529 (2009). https://doi.org/10.1016/j.chaos.2007.08.001
Vanterler da C. Sousa, J., Capelas de Oliveira, E.: On the Ulam–Hyers–Rassias stability for nonlinear fractional differential equations using the ψ-Hilfer operator. J. Fixed Point Theory Appl. 20, 96 (2018). https://doi.org/10.1007/s11784-018-0587-5
Wang, J., Li, X.: Ulam–Hyers stability of fractional Langevin equations. Appl. Math. Comput. 258(9), 72–83 (2015). https://doi.org/10.1016/j.amc.2015.01.111
Shah, K., Hussain, W.: Investigating a class of nonlinear fractional differential equations and its Hyers–Ulam stability by means of topological degree theory. Numer. Funct. Anal. Optim. 40(12), 1355–1372 (2019). https://doi.org/10.1080/01630563.2019.1604545
Infante, G., Webb, J.: Loss of positivity in a nonlinear scalar heat equation. Nonlinear Differ. Equ. Appl. 13, 249–261 (2006). https://doi.org/10.1007/s00030-005-0039-y
Nieto, J.J., Pimentel, J.: Positive solutions of a fractional thermostat model. Bound. Value Probl. 2013, 5 (2013). https://doi.org/10.1186/1687-2770-2013-5
Podlubny, I.: Fractional Differential Equations. Academic Press, San Diego (1999)
Granas, A., Dugundji, J.: Fixed Point Theory. Springer, New York (2003)
Ulam, S.: Problems in Modern Mathematics. Wiley, New York (1964)
Hyers, D.H.: On the stability of the linear functional equation. Proc. Natl. Acad. Sci. USA 27(4), 222–224 (1941). https://doi.org/10.1073/pnas.27.4.222
Rus, I.A.: Ulam stabilities of ordinary differential equations in a Banach space. Carpath. J. Math. 26(1), 103–107 (2010). https://www.jstor.org/stable/43999438
Alqahtani, B., Fulga, A., Karapinar, E.: Fixed point results on δ-symmetric quasi-metric space via simulation function with an application to Ulam stability. Mathematics 6(10), 208 (2018). https://doi.org/10.3390/math6100208
Alzabut, J., Selvam, G.M., El-Nabulsi, R.A., Vignesh, D., Samei, M.E.: Asymptotic stability of nonlinear discrete fractional pantograph equations with non-local initial conditions. Symmetry 13(3), 473 (2021). https://doi.org/10.3390/sym13030473
Rezapour, S., Ntouyas, S.K., Amara, A., Etemad, S., Tariboon, J.: Some existence and dependence criteria of solutions to a fractional integro-differential boundary value problem via the generalized Gronwall inequality. Mathematics 9(11), 1165 (2021). https://doi.org/10.3390/math9111165
Zhou, J.K.: Differential Transformation and Its Applications for Electrical Circuits. Huazhong University Press, Wuhan (1986) (in Chinese)
Odibat, Z., Momani, M.: Generalized differential transform method for linear partial differential equations of fractional order. Appl. Math. Lett. 21(2), 194–199 (2008). https://doi.org/10.1016/j.aml.2007.02.022
Erturk, V.S., Momani, M., Odibat, Z.: Application of generalized differential transform method to multi-order fractional differential equations. Commun. Nonlinear Sci. Numer. Simul. 13(8), 1642–1654 (2008). https://doi.org/10.1016/j.cnsns.2007.02.006
Acknowledgements
The first and fourth authors were supported by Azarbaijan Shahid Madani University. The authors express their gratitude to dear unknown referees for their helpful suggestions which improved the final version of this paper.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
The authors declare that the study was realized in collaboration with equal responsibility. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Competing interests
The authors declare that they have no competing interests.
Consent for publication
Not applicable.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Etemad, S., Tellab, B., Alzabut, J. et al. Approximate solutions and Hyers–Ulam stability for a system of the coupled fractional thermostat control model via the generalized differential transform. Adv Differ Equ 2021, 428 (2021). https://doi.org/10.1186/s13662-021-03563-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-021-03563-x