
Abstract
In this article, a fractional-order mathematical physics model, advection–dispersion equation (FADE), will be solved numerically through a new approximative technique. Shifted Vieta–Lucas orthogonal polynomials will be considered as the main base for the desired numerical solution. These polynomials are used for transforming the FADE into an ordinary differential equations system (ODES). The nonstandard finite difference method coincidence with the spectral collocation method will be used for converting the ODES into an equivalence system of algebraic equations that can be solved numerically. The Caputo fractional derivative will be used. Moreover, the error analysis and the upper bound of the derived formula error will be investigated. Lastly, the accuracy and efficiency of the proposed method will be demonstrated through some numerical applications.
Similar content being viewed by others
1 Introduction
The fractional-order differential equations have been widely used for describing a variety of phenomena in physics, astrophysics, medicine, chemistry, optimal control, engineering, biology, fluid dynamics, etc. (see, for instance, [9, 18, 26–28]). The ordinary/partial differential equations that contain fractional-order derivatives provide more flexible models compared with the classical ones that are characterized by integer-orders [2, 7, 10]. To understand the idea of the fractional derivative more clearly, see the example of the Lane–Emden-type equations of the fractional-order derivatives that include aspects of a stellar structure, the thermal history of a spherical cloud of the gas, isothermal gas spheres, and thermionic currents [19]. It is well known that the ordinary Lane–Emden equation does not provide the correct description of the dynamics for the systems in the complex media [5]. This example proves and supports the fractional-order derivative representation of equations such as the diffusion equation, advection–dispersion equation, wave equation, heat equation, Bagley–Torvik equation, as well as other applications [13, 16, 17, 24, 34, 36].
In many fractional-order models, the analytical solution is more complicated, therefore the numerical solutions for these models are appropriate [1, 6, 20]. These numerical solutions depend on several techniques such as finite difference, finite volume, variational iteration, Legendre polynomials, Chebyshev collocation, homotopy perturbation, operational matrix, variational iteration, Adams–Bashforth, nonstandard finite difference, sinc-collocation, compact finite difference, tau method, block pulse, decomposition, radial basis, Taylor collocation, and wavelets spectral (see, for example, [5, 11, 24, 25, 35, 38]). All these methods introduce numerical solutions for many types of fractional-order differential equations. In this work, we strive to solve the fractional-order advection–dispersion equation numerically via a nonstandard finite difference method besides a collocation method that depends on a new class of orthogonal polynomials (Vieta–Lucas).
Therefore, consider the following formula of the fractional-order advection–dispersion equation (FADE) [15, 30, 31, 34]:
with the initial condition
and the boundary conditions
Here \(u(x,t)\) refers to the solute concentration, the fractional derivative term \(\frac{\partial ^{\alpha }u(x,t)}{\partial x^{\alpha }}\) is a dispersion function with the dispersion coefficient λ, the second fractional derivative \(\frac{\partial ^{\beta }u(x,t)}{\partial x^{\beta }}\) is the advection term with the average fluid velocity coefficient μ, and the last term \(s(x,t)\) is the source/sink term. Besides that, the fractional-order terms are considered as the fractional derivatives in the Caputo operator of differentiation.
The classical order advection–dispersion equation can be obtained by using the values \(\alpha =2\), \(\beta =1\) in Eq. (1) to have:
Equation (1) is a generalization of Eq. (4), therefore, the researchers have a big chance for modeling many problems in various areas of science such as anomalous diffusion, biology problems, petroleum engineering, heat transfer, physical problems, and others [3, 4, 33, 37].
The fractional-order advection–dispersion equation is solved numerically through different approximation methods (see, for instance, [8, 14, 15, 21, 23, 29]). Despite the big efforts of the researchers and mathematicians for solving this type of equations, many other researchers still research new techniques and methods that give high accuracy solutions for the same equations. We believe that the proposed shifted Vieta–Lucas orthogonal polynomials are a new method to solve FADE, and no one used this approach to date. Consequently, the main idea behind this work is to introduce a new numerical technique for solving the FADE. This technique depends on the shifted Vieta–Lucas polynomials as a family of the desired numerical solution, besides the nonstandard finite difference method, and the spectral collocation technique. As the final step, the obtained algebraic system of equations will be solved numerically via any iteration method.
This paper is structured as follows. In the next section, some necessary mathematical tools required for the construction of this work will be given. In addition, the derivation of some important relations for shifted Vieta–Lucas polynomials will be introduced in the same section. The desired series solution will be presented in Sect. 3. In Sect. 4, the error bound are investigated. Construction methodology for solving the FADE that is given in Eq. (1) via the spectral collocation method, together with the nonstandard method, will be proposed in Sect. 5. For the demonstration of the accuracy, efficiency, and applicability of the suggested technique, some numerical applications will be presented in Sect. 6. Lastly, concluding remarks are reported.
2 Main mathematical tools
2.1 Caputo’s differentiation operator
Definition 2.1
([1])
Let the function \(h(x)\) be differentiable, and let α be the order of the derivative. Then Caputo operator of the fractional derivative can be defined as follows:
where \(m-1<\alpha \leq m\), \(m\in \mathbb{N}\).
The Caputo operator is linear. Moreover, via Definition 2.1, the following can be claimed:
where the ceiling function of r is \(\lceil r\rceil \).
2.2 Nonstandard finite difference scheme notations
The discrete first derivative can be described by:
where \(\psi (h)\) and \(\phi (h)\) are functions in the step-size discretization \(h=\Delta t\) and
This formula for the first derivative is called the nonstandard finite difference method presentation. Also, the denominator function satisfies the condition \(0 <\phi (h)<1\), \(h \rightarrow 0\). There is no determined base for the best choice of the function \(\phi (h)\), but we can introduce the most popular functions in the nonstandard finite difference technique as follows:
For more details, see some of Mickens’s publications [22].
2.3 Vieta–Lucas polynomials
In this part of the paper, we study a class of orthogonal polynomials, which, to the best of our knowledge, are presented here for the first time. These polynomials can be created by means of the recurrence relations and analytical formula to build a new family of orthogonal polynomials that will be well-known as Vieta–Lucas polynomials.
Definition 2.2
([12])
Consider \(|x|\leq 2\), then the class of polynomials of degree \(n\in \mathbb{N}_{0}\) in the variable x can be defined as:
This family of polynomials is called the Vieta–Lucas polynomials (\(\operatorname{VL}_{n}(x)\)) and \(\mathbb{N}_{0}=\{0,1,2,\ldots \}\).
Polynomial \(\operatorname{VL}_{n}(x)\) can be created by means of the following iterative formula:
Also, \(\operatorname{VL}_{n}(x)\) can be obtained through the following explicit power series formula:
where \(\lceil \frac{n}{2}\rceil \) is the ceiling function.
Moreover, \(\operatorname{VL}_{n}(x)\) are orthogonal polynomials with respect to the following integral:
where \(\frac{1}{\sqrt{4-x^{2}}}\) is the weight function corresponding to \(\operatorname{VL}_{n}(x)\).
2.4 Shifted Vieta–Lucas polynomials
In this subsection, the relevant properties and relations of Vieta–Lucas polynomials and their shifts will be concluded. The shifted Vieta–Lucas polynomials (\(\operatorname{VL}^{*}_{n}(x)\)) can be considered as a new class of orthogonal polynomials defined on the closed interval \([0,1]\).
Definition 2.3
The shifted Vieta–Lucas polynomials of degree n on \([0,1]\) can be obtained from \(\operatorname{VL}_{n}(x)\) as follows:
Also, \(\operatorname{VL}^{*}_{n}(x)\) are created by utilizing the following recurrence formula:
with the starting values
Moreover, the explicit analytical formula for \(\operatorname{VL}^{*}_{n}(x)\) can be obtained through the following expression:
Polynomials \(\operatorname{VL}^{*}_{n}(x)\) have the orthogonality property with respect to the following inner product:
where \(\omega (x)=\frac{1}{\sqrt{x-x^{2}}}\) is the wight function.
Let the function \(u(x)\) be Lebesgue-square-integrable on the interval \([0,1]\) and suppose that it can be expressed as a linear combination of the independent power functions in terms of \(\operatorname{VL}^{*}_{n}(x)\) as follows:
where \({c_{i}}\) are the unknown coefficients.
Generally, only the first \(n+1\) terms of the series in Eq. (14) is appropriate in all cases of the approximation theory. Therefore, we have
where the undetermined coefficients \(c_{i}\), \(i=0,2,\ldots ,n\) can be obtained via one of the following expressions:
or
where
3 Derivation of the main scheme
Theorem 1
Consider the approximate solution of the main problem described in Eq. (1) expressed in the terms of shifted Vieta–Lucas polynomials as in Eq. (15). Then, the fractional-order terms can be transformed into algebraic equations as follows:
where
Proof
Consider the approximate solution for Eq. (1) as given in Eq. (15). Then applying the fractional operator gives
Using Caputo’s operator definition (7), we have
In addition,
Using Eqs. (6) and (7), Eq. (23) is reformulated as
Collocating Eqs. (21), (22), and (24), we have
Here, Eq. (25) can be rewritten in the following form:
where
The proof is completed. □
Remark
The second term of fractional-order given in our problem Eq. (1) can be transferred into an algebraic term by using the same theorem (Theorem (1)).
4 Discussion of error estimate
Theorem 2
Suppose that the function \(u(x)\in L_{\omega }^{2}[0,1]\) and \(u''(x)\leq M\), where M is a constant. Then \(u(x)\) can be expressed as an infinite linear combination of shifted Vieta–Lucas polynomials, and \(u_{n}(x)\) has only \(n+1\) terms of this expression. Also, this numerical solution converges uniformly to the function \(u(x)\) (\(u_{n}(x) \rightarrow u(x)\) as \(n\rightarrow \infty \)). Moreover, the coefficients given in Eq. (17) are bounded, i.e.,
where
Proof
Consider the function \(u(x)\) satisfying the stated conditions and having expression as in Eq. (28). Use the approximation theory to take only \(n+1\) terms of this series as follows:
where the coefficients \(c_{i}\), \(i=0,1,\ldots ,n\) can be determined via Eq. (17). To compute the integrals, use the substitution \(4x-2=2\cos (\theta )\) in Eq. (17), and then the following is gained:
Integrating twice by parts in Eq. (31) gives
where
Applying the absolute value properties on Eq. (32) produces
From the properties of the function \(u(x)\) and of the trigonometric functions, Eq. (34) is transformed into the inequality
By rearranging the integration and performing some analytical manipulations, we have
Hence, the proof is completed. □
Lemma 4.1
([32])
Let \(f(x)\) be a function such that \(f(k) = c_{k}\) and assume the following:
-
\(f(x)\) is a continuous, positive, decreasing function for \(x \geq n\).
-
\(\sum c_{n}\) is convergent, and \(R_{n} =\sum_{k=n+1}^{\infty } c_{k}\).
Then
Lemma 4.1 is necessary for the following theorem.
Theorem 3
If the function \(u(x)\) satisfies the conditions of Theorem 2, and \(u_{n}(x)=\sum_{i=0}^{n} c_{i} \operatorname{VL}^{*}_{i}(x)\) has only \(n+1\) terms of this function, then an estimate of the error (in \(L_{\omega }^{2}[0,1]\) norm) can be described by the following inequality:
Proof
The error in \(L_{\omega }^{2}[0,1]\) is defined by
Using Eqs. (14) and (15), in addition to the orthogonality property of \(\operatorname{VL}^{*}_{i}(x)\) that was introduced in Eq. (13), we have the following result:
By Eq. (40) of Theorem 2, we acquire the following inequality:
An application of Lemma 4.1 leads to
Finally, Eq. (42) describes the error bound as the following formula:
The theorem is proved. □
Theorem 4
If the function \(u(x)\in [0,1]\) is n times continuously differentiable and the most square-suitable approximation for this function is \(u_{n}(x)\) defined in Eq. (15), then we have
where
Proof
The function \(u(x)\) can be expanded in the following series:
where \(x_{0}\in [0,1]\) and \(\xi \in \, ]x_{0},x[\). Assume
Then
If \(u_{n}(x)\) is as in Theorem (4), then
Now, let \(W=\max \{1-x_{0},x_{0}\}\), thus
Since \(\omega (x)=\frac{1}{\sqrt{x-x^{2}}}\),
Hence,
The proof is complete. □
5 Suggested technique for the main problem (FADE)
This section concerns the numerical solution scheme for the fractional-order advection–dispersion equation via our proposed technique in this work. Therefore, assume the problem given in Eqs. (1)–(3).
Firstly, propose the approximate solution of this problem presented in terms of shifted Vieta–Lucas polynomials as follows:
Based on Theorem 1, along with substituting Eq. (52) into Eq. (1), we have the following equation:
Now, collocate Eq. (53) at the roots of the function \(\operatorname{VL}^{*}_{n+1-\lceil \alpha \rceil }(x)\), which are named the collocation points \(x_{p}\), as follows:
where \(c_{i}\) (\(i=0,1,\ldots ,n\)) are \(n+1\) unknown coefficients. For obtaining these coefficients \(n+1\) algebraic equations are needed, but Eq. (54) gives us only \(n+1-\lceil \alpha \rceil \) ordinary differential equations that are transformed into algebraic equations. So \(\lceil \alpha \rceil \) equations are required for completing the desired system. For this aim, substitute the numerical approach (52) in the boundary conditions, Eq. (3). Moreover, for obtaining the initial values of the coefficients \(c_{i}\) (\(i=0,1,\ldots ,n\)) at the initial state, we use Eq. (52) with Eq. (2) in addition to Eq. (17). The general formula of the boundary conditions given in Eq. (3) via the terms of \(\operatorname{VL}^{*}_{n}\) can be determined through the following equations:
Lastly, the nonstandard finite difference method will be used for the transformation of Eq. (54) into \(n+1-\lceil \alpha \rceil \) algebraic equations. Hence, combining these results with Eqs. (55) and (56) will constitute a linear system of \(n+1\) equations. This system can be solved numerically via any suitable procedure for obtaining the unknowns \(c_{i}\) (\(i=0,1,\ldots ,n\)) and therefore the desired approximate solution \(u_{n}(x)\) of FADE can be calculated.
6 Numerical experiments
In this section, we introduce some examples that are solved numerically via the suggested method. Also, comparisons of our results with other published numerical results will be made. These examples and numerical benchmarks will be constructed to illustrate the accuracy, applicability, and efficiency of our proposed method for solving the FADE numerically.
Example 6.1
Consider the following fractional-order advection–dispersion equation [15, 30, 31, 34]:
with the source function
the initial condition
and the boundary conditions
The analytic solution of Eqs. (58)–(60) is given by
Apply our proposed method as follows;
Use Eq. (61) together with (54) to obtain
where the collocation points \(x_{p}\) are the roots for the shifted Vieta–Lucas polynomials of the second degree. Also, Eqs. (55) and (56) are used respectively to have
The nonstandard finite difference method given in Sect. 2.2 is applied here to convert the two generated equations of Eq. (62) into two algebraic equations. These equations are combined with Eqs. (63) and (64) to have a system of algebraic equations. Now, we have four equations in four unknown coefficients \(c_{i}\) (\(i=0,1,2,3\)). This system can be presented in the following matrix formula:
where
\(C^{n}={{(c^{n}_{0}, c^{n}_{1}, c^{n}_{2}, c^{n}_{3})}}^{T}\), and \(s^{n}={{(s^{n}_{0}, s^{n}_{1}, 0, 0, )}}^{T}\).
At this time, the matrix equation Eq. (65) will be solved numerically via any suitable iteration method with the initial values of the coefficients \(C^{0}={{(c^{0}_{1}, c^{0}_{2}, c^{0}_{3}, c^{0}_{4})}}^{T}\). These starting values are obtained through Eq. (59) in addition to Eq. (17). Consequently, the coefficients \(c_{i}\) (\(i=0,1,2,3\)) are obtained. Hence, the desired approximate solution of the problem (57)–(60) is calculated.
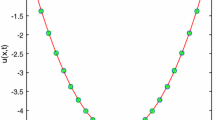
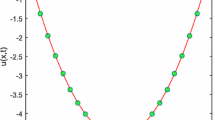
The numerical results obtained through our suggested method for the first Example 6.1 in different cases are reported in Table 1 in addition to Figs. 1, 2, 3, and 4. In Table 1, the numerical results were obtained in published articles [15] and [31], and are compared with ours. These numerical results are reported when the parameters are \(\alpha =2\), \(\beta =1\), \(T=2\) at \(n=5\) for [15] and [31] while for the proposed technique \(n=3\), in addition to the nonstandard term \(\phi (h)=0.5 (\exp (2h)-1)\) with \(\Delta t=h=0.0004\). All the results of the following figures are calculated under the same conditions, the main differences are the nonstandard term and the final time T except in Fig. 4. Figure 1 shows the numerical and exact solutions for Example 6.1 with the same parameters of Table 1, only the different the final times \((T=1, T=2)\). Also, Fig. 2 describes the results with a large enough time domain in Example 6.1. Moreover, Fig. 3 presents the results of the suggested method with different values of the final time and the truncation terms of the approximate solutions \(n=5\). Furthermore, Fig. 4 provides the results for different fractional parameters α and β with \(T=15\). From Table 1, and the results in Figs. 1, 2, 3, and 4, the suggested method is applicable and more accurate than those in [15] and [31]. Also, it is obvious that our proposed method can be used for large enough times of the problem and gives good accuracy. Finally, this discussion supported and proved the truth of the theoretical technique and theorems introduced in this article.

Approximate and analytical solutions of Example 6.1 for \(n=3\) with final times \(T=1\) (left), \(T=2\) (right), and \(\phi (h)=0.5 (\exp (2h)-1)\)

Approximate and exact solutions of Example 6.1 for \(n=3\) with final times \(T=5\) (left), \(T=10\) (right), and \(\phi (h)=4\sinh (h/4)\)

Approximate and exact solutions of Example 6.1 for \(n=5\) with final times \(T=20\) (left), \(T=30\) (right), and \(\phi (h)=2\sin (h/2)\)

Exact and approximate solutions for Example 6.1 in the case of \(n=5\) with fractional values \(\alpha = 1.8\), \(\beta =0.8\) (left), \(\alpha = 1.6\), \(\beta =0.8\) (right) with \(\phi (h)=2\sin (h/2)\), \(h=2.5\times 10^{-4}\), and \(T=15\)
Example 6.2
with the source function
the initial condition
and the conditions
The exact solution of Eqs. (66)–(69) is
Suppose that
We use the presented method to obtain the approximate solution of this problem.
The numerical results via our suggested technique for Example 6.2 are presented in Table 2 and the three figures thereafter. Table 2 lists the absolute error in the three cases, \(T=0.3, 0.6\), and 0.9, with same step size \(\Delta t=h=0.00025\) (which will be considered in all results of this example), \(\phi (h)=-(\exp (-1.2h)-1)/1.2\) at \(n=3\). In Fig. 5, the graphs of the exact and numerical solutions for Example 6.2 for \(n=3\) and \(\phi (h)=-(\exp (-1.2h)-1)/1.2\) with \(T=0.3\) and \(T=0.6\) are respectively shown. The curves of the exact and numerical solutions are plotted in Fig. 6 for Example 6.2 at \(n=3\) and \(\phi (h)=4\sinh (h/4)\) with \(T=5\) and \(T=10\), respectively. Moreover, the last figure (Fig. 7) shows the analytical and approximate solutions of Example 6.2 for \(n=5\) and \(\phi (h)=2\sin (h/2)\) with \(T=20\) and \(T=30\), respectively. Consequently, these obtained results show us the fact that our proposed method is efficient and gives a high accuracy for different cases.

Approximate and analytical solutions of Example 6.2 for \(n=3\) with final times \(T=0.3\) (left), \(T=0.6\) (right), and \(\phi (h)=-(\exp (-1.2h)-1)/1.2\)

Approximate and exact solutions of Example 6.2 for \(n=3\) with final times \(T=5\) (left), \(T=10\) (right), and \(\phi (h)=4\sinh (h/4)\)

Approximate and exact solutions of Example 6.2 for \(n=5\) with final times \(T=20\) (left), \(T=30\) (right), and \(\phi (h)=2\sin (h/2)\)
7 Conclusions
In the present article, we have introduced a trustworthy method for solving a mathematical physics model of fractional-order, advection–dispersion equation, numerically. This method was based on a class of orthogonal polynomials which is called the shifted Vieta–Lucas polynomials. The principle strategy of the suggested treatment is transforming the original equation into a system of ODEs by applying the spectral collocation method. Next, we used the nonstandard finite difference method to transform these equations into algebraic equations. After that, the Gaussian elimination method was used (or any appropriate iterative technique). Actually, we have proposed an accurate technique that converges fast to the real solution for solving the FADEs. Also, an error estimate of our method was derived. Some numerical applications were introduced for demonstrating the accuracy, efficiency, and applicability of the current method. Moreover, our numerical results were compared with other published approximation data in the literature, showing reliability and accuracy of the proposed technique. Furthermore, this method gives us flexibility for solving different equations appearing in applications in many fields such as physics, engineering, chemistry, and others, because the given problems are solved at different values of T. All computed results were obtained using MATLAB program. In the future, we can apply this technique for solving many equations from applications in one and two dimensions, especially in physics, such as diffusion equation, wave equation, telegraph equation, and so on.
Availability of data and materials
The data used to support the findings of this study are included within the article.
References
Agarwal, P., El-Sayed, A.A.: Non-standard finite difference and Chebyshev collocation methods for solving fractional diffusion equation. Physica A 500, 40–49 (2018)
Agarwal, P., El-Sayed, A.A., Tariboong, J.: Vieta–Fibonacci operational matrices for spectral solutions of variable-order fractional integro-differential equations. J. Comput. Appl. Math. (2020). https://doi.org/10.1016/j.cam.2020.113063
Benson, D.A., Wheatcraft, S.W., Meerschaert, M.M.: Application of a fractional advection–dispersion equation. Water Resour. Res. 36(6), 1403–1412 (2000)
Chechkin, A.V., Gonchar, V.Y., Klafter, J., Metzler, R., Tanatarov, L.V.: Lévy flights in a steep potential well. J. Stat. Phys. 115(5), 1505–1535 (2004)
Doha, E.H., Abd-Elhameed, W.M., Youssri, Y.H.: Second kind Chebyshev operational matrix algorithm for solving differential equations of Lane–Emden type. New Astron. 23–24, 113–117 (2013)
El-Sayed, A.A., Agarwal, P.: Numerical solution of multiterm variable-order fractional differential equations via shifted Legendre polynomials. Math. Methods Appl. Sci. 41(11), 3978–3991 (2019)
El-Sayed, A.A., Baleanu, D., Agarwal, P.: A novel Jacobi operational matrix for numerical solution of multi-term variable-order fractional differential equations. J. Taibah Univ. Sci. 14(1), 963–974 (2020)
El-Sayed, A.M.A., Behiry, S.H., Raslan, W.E.: Adomian’s decomposition method for solving an intermediate fractional advection–dispersion equation. Comput. Math. Appl. 59(5), 1759–1765 (2010)
Emadifar, H., Jalilian, R.: An exponential spline approximation for fractional Bagley–Torvik equation. Bound. Value Probl. 2020, 20 (2020). https://doi.org/10.1186/s13661-020-01327-2
Golbabai, A., Sayevand, K.: Analytical modelling of fractional advection–dispersion equation defined in a bounded space domain. Math. Comput. Model. 53, 1708–1718 (2011)
Hooshmandasl, M., Heydari, M., Cattani, C.: Numerical solution of fractional sub-diffusion and time-fractional diffusion-wave equations via fractional-order Legendre functions. Eur. Phys. J. Plus 131(8), 268 (2016)
Horadam, A.F.: Vieta polynomials. The University of New England, Armidaie, Australia 2351 (2000)
Ji, T., Hou, J.: Numerical solution of the Bagley–Torvik equation using Laguerre polynomials. SeMA J. 77, 97–106 (2020)
Jiang, W., Lin, Y.: Approximate solution of the fractional advection–dispersion equation. Comput. Phys. Commun. 181(3), 557–561 (2010)
Khader, M.M., Sweilam, N.H.: Approximate solutions for the fractional advection–dispersion equation using Legendre pseudo-spectral method. Comput. Appl. Math. 33, 739–750 (2014)
Khalid, N., Abbas, M., Iqbal, M.K., Baleanu, D.: A numerical algorithm based on modified extended B-spline functions for solving time-fractional diffusion wave equation involving reaction and damping terms. Adv. Differ. Equ. 2019, 378 (2019). https://doi.org/10.1186/s13662-019-2318-7
Khan, H., Shah, R., Kumam, P., Arif, M.: Analytical solutions of fractional-order heat and wave equations by the natural transform decomposition method. Entropy 21, 597 (2019)
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Applications of Fractional Differential Equations. Elsevier, San Diego (2006)
Ma, W.-X., Mousa, M.M., Ali, M.R.: Application of a new hybrid method for solving singular fractional Lane–Emden-type equations in astrophysics. Mod. Phys. Lett. B 34(3), 2050049 (2020). https://doi.org/10.1142/S0217984920500499
Maleknejad, K., Nouri, K., Torkzadeh, L.: Operational matrix of fractional integration based on the shifted second kind Chebyshev polynomials for solving fractional differential equations. Mediterr. J. Math. 13, 1377–1390 (2016)
Meerschaert, M.M., Tadjeran, C.: Finite difference approximations for fractional advection–dispersion flow equation. J. Comput. Appl. Math. 172(1), 65–77 (2004)
Mickens, R.E.: Applications of Nonstandard Finite Difference Schemes. World Scientific, Singapore (2000)
Momani, S., Odibat, Z.: Numerical solutions of the space-time fractional advection–dispersion equation. Numer. Methods Partial Differ. Equ. 24(6), 1416–1429 (2008)
Nagy, A.M., El-Sayed, A.A.: An accurate numerical technique for solving two-dimensional time fractional order diffusion equation. Int. J. Model. Simul. 39(3), 214–221 (2019)
Nagy, A.M., Sweilam, N.H., El-Sayed, A.A.: New operational matrix for solving multi-term variable order fractional differential equations. J. Comput. Nonlinear Dyn. 13, 011001 (2018)
Pinto, C.M.A., Carvalho, A.R.M.: Fractional modeling of typical stages in HIV epidemics with drug-resistance. Prog. Fract. Differ. Appl. 1(2), 111–122 (2015)
Qureshi, S., Yusuf, A.: Modeling chickenpox disease with fractional derivatives: from Caputo to Atangana–Baleanu. Chaos Solitons Fractals 122, 111–118 (2019)
Qureshi, S., Yusuf, A., Shaikh, A.A., Inc, M., Baleanu, D.: Fractional modeling of blood ethanol concentration system with real data application. Chaos, Interdiscip. J. Nonlinear Sci. 29(1), 013143 (2019)
Roop, J.P.: Numerical approximation of a one-dimensional space fractional advection–dispersion equation with boundary layer. Comput. Math. Appl. 56, 1808–1819 (2008)
Saw, V., Kumar, S.: Fourth kind shifted Chebyshev polynomials for solving space fractional order advection–dispersion equation based on collocation method and finite difference approximation. Int. J. Appl. Comput. Math. 4, 82 (2018). https://doi.org/10.1007/s40819-018-0517-7
Saw, V., Kumar, S.: Second kind Chebyshev polynomials for solving space fractional advection–dispersion equation using collocation method. Iran. J. Sci. Technol. Trans. Sci. 43(3), 1027–1037 (2019)
Stewart, J.: Single Variable Essential Calculus: Early Transcendentals. Cengage Learning (2012)
Su, L., Wang, W., Xu, Q.: Finite difference methods for fractional dispersion equations. Appl. Math. Comput. 216(11), 3329–3334 (2010)
Sweilam, N.H., Khader, M.M., Adel, M.: Chebyshev pseudo-spectral method for solving fractional advection–dispersion equation. Appl. Math. 5(19), 3240–3248 (2014)
Sweilam, N.H., Khader, M.M., Al-Bar, R.F.: Homotopy perturbation method for linear and nonlinear system of fractional integro-differential equations. Int. J. Comput. Math. Numer. Simul. 1(1), 73–87 (2008)
Sweilam, N.H., Nagy, A.M., El-Sayed, A.A.: Numerical approach for solving space fractional order diffusion equations using shifted Chebyshev polynomials of the fourth kind. Turk. J. Math. 40, 1283–1297 (2016)
Yadav, N., Yadav, A., Kim, J.H.: Numerical solution of unsteady advection dispersion equation arising in contaminant transport through porous media using neural networks. Comput. Math. Appl. 72, 1021–1030 (2016)
Zhou, F.Y.: The third kind Chebyshev wavelets collocation method for solving the time-fractional convection diffusion equations with variable coefficients. Appl. Math. Comput. 280, 11–29 (2016)
Acknowledgements
The authors would like to gratefully thank Rustaq College of Education, 329-Rustaq, Sultanate of Oman, for funding and supporting this article.
Funding
This research was funded by Rustaq College of Education, Ministry of Higher Education, 329-Rustaq, Sultanate of Oman.
Author information
Authors and Affiliations
Contributions
Both authors contributed equally to this article. Both authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Agarwal, P., El-Sayed, A.A. Vieta–Lucas polynomials for solving a fractional-order mathematical physics model. Adv Differ Equ 2020, 626 (2020). https://doi.org/10.1186/s13662-020-03085-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-020-03085-y