
Abstract
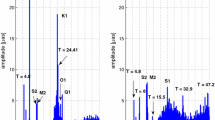
The second reprocessing of all GPS data gathered by the Analysis Centers of IGS was conducted in late 2013 using the latest models and methodologies. Improved models of antenna phase center variations and solar radiation pressure in JPL’s reanalysis are expected to significantly reduce errors. In an earlier work, JPL estimates of position time series, termed first reprocessing campaign, were examined in terms of their spatial and temporal correlation, power spectra, and draconitic signal. Similar analyses are applied to GPS time series at 89 and 66 sites of the second reanalysis with the time span of 7 and 21 years, respectively, to study possible improvements. Our results indicate that the spatial correlations are reduced on average by a factor of 1.25. While the white and flicker noise amplitudes for all components are reduced by 29–56 %, the random walk amplitude is enlarged. The white, flicker, and random walk noise amount to rate errors of, respectively, 0.01, 0.12, and 0.09 mm/yr in the horizontal and 0.04, 0.41 and 0.3 mm/yr in the vertical. Signals reported previously, such as those with periods of 13.63, 14.76, 5.5, and 351.4 / n for \(n=1,2,{\ldots },8\) days, are identified in multivariate spectra of both data sets. The oscillation of the draconitic signal is reduced by factors of 1.87, 1.87, and 1.68 in the east, north and up components, respectively. Two other signals with Chandlerian period and a period of 380 days can also be detected.












Similar content being viewed by others

References
Altamimi Z, Collilieux X (2009) IGS contribution to the ITRF. J Geod 83(3):375–383
Amiri-Simkooei AR (2007) Least-squares variance component estimation: theory and GPS applications (Ph.D. thesis). Delft University of Technology. Publication on Geodesy. 64. Netherlands Geodetic Commission, Delft
Amiri-Simkooei AR (2009) Noise in multivariate GPS position time-series. J Geod 83(2):175–187
Amiri-Simkooei AR (2013a) On the nature of GPS draconitic year periodic pattern in multivariate position time series. J Geophys Res: Solid Earth 118(5):2500–2511
Amiri-Simkooei AR (2013b) Application of least-squares variance component estimation to errors-in-variable models. J Geod 87(10):935–944
Amiri-Simkooei AR (2016) Non-negative least squares variance component estimation with application to GPS time series. J Geod. doi:10.1007/s00190-016-0886-9
Amiri-Simkooei AR, Tiberius CCJM, Teunissen PJG (2007) Assessment of noise in GPS coordinate time series: methodology and results. J Geophys Res: Solid Earth 112:B07413. doi:10.1029/2006JB004913
Amiri-Simkooei AR, Teunissen PJG, Tiberius CCJM (2009) Application of least-squares variance component estimation to GPS observables. J Surv Eng 135(4):149–160
Amiri-Simkooei AR, Zangeneh-Nejad F, Asgari J (2013) Least-squares variance component estimation applied to GPS geometry-based observation model. J Surv Eng 139(4):176–187
Argus DF (2012) Uncertainty in the velocity between the mass center and surface of Earth. J Geophys Res: Solid Earth 117:B10405. doi:10.1029/2012JB009196
Argus DF, Fu Y, Landerer FW (2014) GPS as a high resolution technique for evaluating water resources in California. Res. Lett, Geophys. doi:10.1002/2014GL059570
Argus DF, Heflin MB, Peltzer G, Webb FH, Crampe F (2005) Interseismic strain accumulation and anthropogenic motion in metropolitan Los Angeles. J Geophys Res 101:B04401. doi:10.1029/2003JB002934
Argus DF, Gordon RG, Heflin MB, Ma C, Eanes RJ, Willis P, Peltier WR, Owen SE (2010) The angular velocities of the plates and the velocity of Earth’s center from space geodesy. Geophys J Int 180:913–960. doi:10.1111/j.1365-246X.2009.04463.x
Bassiri S, Hajj G (1993) High-order ionospheric effects of the global positioning system observables and means of modeling them. Manuscr Geod 18:280–289
Beutler G, Rothacher M, Schaer S, Springer TA, Kouba J, Neilan RE (1999) The International GPS Service (IGS): an interdisciplinary service in support of Earth sciences. J Adv Space Res 23(4):631–635
Blewitt G, Lavallée D, Clarke P, Nurutdinov K (2001) A new global mode of Earth deformation: seasonal cycle detected. Science 294:2342–2345
Bock Y, Nikolaidis RM, de Jonge PJ, Bevis M (2000) Instantaneous geodetic positioning at medium distances with the Global Positioning System. J Geophys Res: Solid Earth 105(B12):28223–28253
Bock Y, Wdowinski S, Ferretti A, Novali F, Fumagalli A (2012) Recent subsidence of the Venice Lagoon from continuous GPS and interferometric synthetic aperture radar. Geochem Geophys Geosyst 13(Q03023):2011G. doi:10.1029/C003976
Bogusz J, Klos A (2016) On the significance of periodic signals in noise analysis of GPS station coordinate time series. GPS Solut. 20(4):655–664. doi:10.1007/s10291-015-0478-9
Bogusz J, Gruszczynski M, Figurski M, Klos A (2015) Spatio-temporal filtering for determination of common mode error in regional GNSS networks. Open Geosci 7(1):140–148
Bonforte A, Puglisi G (2006) Dynamics of the eastern flank of Mt. Etna volcano (Italy) investigated by a dense GPS network. J Volcanol Geotherm Res 153(3):357–369
Bos MS, Fernandes RMS, Williams SDP, Bastos L (2008) Fast error analysis of continuous GPS observations. J Geod 82(3):157–166
Bos MS, Fernandes RMS, Williams SDP, Bastos L (2012) Fast error analysis of continuous GNSS observations with missing data. J Geod 87(4):351–360
Brzeziński A (2008) Recent advances in theoretical modeling and observation of Earth rotation at daily and subdaily periods. In: Soffel M, Capitaine N (eds) Proceedings of the Journées 2008 “Systèmes de référence spatio-temporels” & X. Lohrmann-Kolloquium: Astrometry, Geodynamics and Astronomical Reference Systems, TU Dresden, Germany, 22–24 September 2008. Lohrmann-Observatorium and Observatoire de Paris
Brzeziński A, Capitaine N (2009) Semidiurnal signal in UT1 due to the influence of tidal gravitation on the triaxial structure of the Earth. In: Proceedings of XXVII General Assembly of the International Astronomical Union, 3–14 August. Rio de Janeiro, Brazil
Calais E (1999) Continuous GPS measurements across the Western Alps, 1996–1998. Geophys J Int 138(1):221–230
Cervelli PF, Fournier T, Freymueller J, Power JA (2006) Ground deformation associated with the precursory unrest and early phases of the January 2006 eruption of Augustine Volcano. Geophys Res Lett, Alaska. doi:10.1029/2006GL027219
Collilieux X, Altamimi Z, Coulot D, Ray J, Sillard P (2007) Comparison of very long baseline interferometry, GPS, and satellite laser ranging height residuals from ITRF2005 using spectral and correlation methods. J Geophys Res: Solid Earth. 112(B12403). doi:10.1029/2007JB004933
Craig TJ, Calais E (2014) Strain accumulation in the New Madrid and Wabash Valley seismic zones from 14 years of continuous GPS observation. J Geophys Res: Solid Earth 119(12):9110–9129
d’Alessio MA, Johanson IA, Bürgmann R, Schmidt DA, Murray MH (2005) Slicing up the San Francisco Bay Area: block kinematics and fault slip rates from GPS-derived surface velocities. J Geophys Res 110:B06403. doi:10.1029/2004JB003496
Desai SD (2002) Observing the pole tide with satellite altimetry. J Geophys Res: Solid Earth 107(C11): doi:10.1029/2001JC001224
Dietrich R, Rulke A, Scheinert M (2005) Present-day vertical crustal deformations in west Greenland from repeated GPS observations. Geophys J Int 163(3):865–874
Dilssner F (2010) GPS IIF-1 satellite: antenna phase and attitude modeling. Inside GNSS 5:59–64
Dilssner F, Springer T, Gienger G, Dow J (2011) The GLONASS-M satellite yaw-attitude model. J Adv Space Res 47(1):160–171
Dmitrieva K, Segal P, DeMets C (2015) Network-based estimation of time-dependent noise in GPS position time series. J Geod 89(6):591–606
Dong D, Fang P, Bock Y, Webb F, Prawirodirdjo L, Kedar S, Jamason P (2006) Spatiotemporal filtering using principal component analysis and Karhunen–Loeve expansion approaches for regional GPS network analysis. J Geophys Res: Solid Earth 111(B03405). doi:10.01029/02005JB003806
Ferland R (2010) Combination of the reprocessed IGS Analysis Center SINEX solutions. IGS10. Newcastle upon Tyne. England. 28 June–2 July (http://acc.igs.org/repro1/repro1-combo_IGSW10.pdf)
Fritsche M, Dietrich R, Knöfel C, Rülke A, Vey S, Rothacher M, Steigenberger P (2005) Impact of higher-order ionospheric terms on GPS estimates. Geophys Res Lett. doi:10.1029/2005GL024342
Gazeaux J, Williams SDP, King MA, Bos M, Dach R, Deo M, Moore AW, Ostini L, Petrie E, Roggero M, Teferle FN, Olivares G, Webb FH (2013) Detecting offsets in GPS time series: first results from the detection of offsets in GPS experiment. J Geophys Res Solid Earth 118(5):2397–2407
Godin G (1972) The analysis of tides. University of Toronto Press, Toronto
Griffiths J, Ray JR (2013) Sub-daily alias and draconitic errors in the IGS orbit. GPS Solut 17(3):413–422
Hesselbarth A, Wanninger L (2008) Short-term stability of GNSS satellite clocks and its effects on precise point positioning. ION GNSS2008. Savannah, Georgia, USA, September 16–19. pp 1855–1863
Hernández-Pajares M, Juan JM, Sanz J, Orús R (2007) Second-order ionospheric term in GPS: implementation and impact on geodetic estimates. J Geophys Res: Solid Earth 112(B08417): doi:10.1029/2006JB004707
Hofmann-Wellenhof B, Lichtenegger H, Walse E (2008) GNSS-Global navigation satellite system. Springer Vienna, Vienna
Hoseini-Asl M, Amiri-Simkooei AR, Asgari J (2013) Offset detection in simulated time-series using multivariate analysis. J Geom Sci Technol 3(1):75–86
Hugentobler U, van der Marel H, Springer T (2006) Identification and mitigation of GNSS errors. In: Springer T, Gendt G, Dow JM (eds) The International GNSS Service (IGS): perspectives and visions for 2010 and beyond, IGS Workshop 2006. ESOC. Darmstadt. Germany. May 6–11
Hugentobler U, Rodriguez-Solano CJ, Steigenberger P, Dach R, Lutz S (2009) Impact of albedo modelling on GNSS satellite orbits and geodetic time series. In: Eos Transactions American Geophysical Union, 90(52), Fall Meeting. San Francisco, California, USA. December 14–19
Johansson JM, Koivula H, Vermeer M (2002) Continous GPS measurements of postglacial adjustment in Fennoscandia, 1, Geodetic results. J Geophys Res 107(B8)
Johnson HO, Agnew DC (2000) Correlated noise in geodetic time series. U.S. Geology Surveying. Final Technical Report, FTR-1434-HQ-97-GR-03155
Kedar S, Hajj GA, Wilson BD, Heflin MB (2003) The effect of the second order GPS ionospheric correction on receiver positions. Geophys Res Lett 30(16)
King MA, Williams SDP (2009) Apparent stability of GPS monumentation from short-baseline time series. J Geophys Res: Solid Earth 114:B10403. doi:10.1029/2009JB006319
King MA, Watson CS (2010) Long GPS coordinate time series: multipath and geometry effects. J Geophys Res: Solid Earth 115:B04403. doi:10.1029/2009JB006543
King MA, Watson CS (2014) Geodetic vertical velocities affected by recent rapid changes in polar motion. Geophys J Int 199(2):1161–1165
King MA, Altamimi Z, Boehm J, Bos M, Dach R, Elosegui P, Fund F, Hernández-Pajares M, Lavallee D, Cerveira PJM et al (2010) Improved constraints on models of glacial isostatic adjustment: a review of the contribution of ground-based geodetic observations. Surv Geophys 31(5):465–507
Khodabandeh A, Amiri-Simkooei AR, Sharifi MA (2012) GPS position time-series analysis based on asymptotic normality of M-estimation. J Geod 86(1):15–33
Koch K-R (1999) Parameter estimation and hypothesis testing in linear model, 2nd edn. Springer, Berlin 333p
Kouba J (2009a) A simplified yaw-attitude model for eclipsing GPS satellites. J GPS Solut 13(1):1–12
Kouba J (2009b) Testing of global pressure/temperature (GPT) model and global mapping function (GMF) in GPS analyses. J Geod 83(3–4):199–208
Kreemer C, Holt WE, Haines AJ (2003) An integrated global model of present-day plate motions and plate boundary deformation. Geophys J Int 154(1):8–34
Kreemer C, Blewitt G, Klein EC (2014) A geodetic plate motion and Global Strain Rate Model. Geochem Geophys Geosyst 15:3849–3889. doi:10.1002/2014GC005407
Lagler K, Schindelegger M, Böhm J, Krásná H, Nilsson T (2013) GPT2: empirical slant delay model for radio space geodetic techniques. J Geophys Res Lett 40(6):1069–1073
Langbein J (2004) Noise in two-color electronic distance meter measurements revisited. J Geophys Res: Solid Earth 109(B04406). doi:10.1029/2003JB002819
Langbein J (2008) Noise in GPS displacement measurements from southern California and southern Nevada. J Geophys Res: Solid Earth 113(B05405). doi:10.1029/2007JB005247
Langbein J (2012) Estimating rate uncertainty with maximum likelihood: differences between power-law and flicker-random-walk models. J Geod 86(9):775–783. doi:10.1007/s00190-012-0556-5
Langbein J, Bock Y (2004) High-rate real-time GPS network at Parkfield: Utility for detecting fault slip and seismic displacements. Geophys Res Lett. doi:10.1029/2003GL019408
Lü WC, Cheng SG, Yang HS, Liu DP (2008) Application of GPS technology to build a mine-subsidence observation station. J China Univ Mine Technol 18(3):377–380
Mao A, Harrison CGA, Dixon TH (1999) Noise in GPS coordinate time series. J Geophys Res: Solid Earth 104(B2):2797–2816
Márquez-Azúa B, DeMets C (2003) Crustal velocity field of Mexico from continuous GPS measurements, 1993 to June 2001: implications for the neotectonics of Mexico. J Geophys Res: Solid Earth 108(B9):2450. doi:10.1029/2002JB002241
Martens HR, Simons M, Owen S, Rivera L (2016) Observations of ocean tidal load response in South America from subdaily GPS positions. Geophys J Int 205:1637–1664
Nikolaidis RM (2002) Observation of geodetic and seismic deformation with the global positioning system. Ph.D Thesis, University of California, San Diego
Nikolaidis RM, Bock Y, de Jonge PJ, Shearer P, Agnew DC, Domselaar M (2001) Seismic wave observations with the global positioning system. J Geophys Res 106(B10):21897–21916
Ostini L (2012) Analysis and quality assessment of GNSS-derived parameter time series. PhD thesis, Astronomisches Institut der Universität Bern. http://www.bernese.unibe.ch/publist/2012/phd/diss_lo_4print.pdf
Peltier WR, Argus DF, Drummond R (2015) Space geodesy constrains ice age terminal deglaciation: The global ICE-6G_C (VM5a) model. J Geophys Res: Solid Earth 119. doi:10.1002/2014JB011176
Petit G, Luzum B (2010) IERS conventions. IERS technical note 36, Verlag des Bundesamts für Kartographie und Geodaüsie, 2010, ISBN 3-89888-989-6. Frankfurt am Main, Germany
Rajner M, Liwosz T (2012) Studies of crustal deformation due to hydrological loading on GPS height estimates. Geod Cartog 60(2):135–144
Ray J (2009) Preparations for the 2nd IGS reprocessing campaign. American Geophysical Union Fall Meeting. San Francisco, California. USA. December 14–19. Poster G11B-0642
Ray J, Altamimi Z, Collilieux X, van Dam T (2008) Anomalous harmonics in the spectra of GPS position estimates. GPS Solut 12(1):55–64
Ray J, Griffiths J, Collilieux X, Rebischung P (2013) Subseasonal GNSS positioning errors. J Geophys Res Lett 40(22):5854–5860
Razeghi SM, Amiri-Simkooei AR, Sharifi MA (2015) Coloured noise effects on deformation parameters of permanent GPS networks. Geophys J Int 204(3):1843–1857
Rebischung P, Altamimi Z, Ray J, Garayt B (2016) The IGS contribution to ITRF2014. J Geod 90(7):611–630
Rodriguez-Solano CJ, Hugentobler U, Steigenberger P (2011)Impact of albedo radiation on GPS satellites In: Geodesy for Planet Earth. Proceeding of the 2009 IAG Symposium, Buenos Aires, Argentina, 31 August– 4 September, pp 113–119
Rodriguez-Solano CJ, Hugentobler U, Steigenberger P, Lutz S (2012) Impact of Earth radiation pressure on GPS position estimates. J Geod 86(5):309–317
Rodriguez-Solano CJ, Hugentobler U, Steigenberger P, Bloßfeld M, Fritsche M (2014) Reducing the draconitic errors in GNSS geodetic products. J Geod 88(6):559–574
Santamaría-Gómez A, Bouin MN, Collilieux X, Wöppelmann G (2011) Correlated errors in GPS position time series: Implications for velocity estimates. J Geophys Res: Solid Earth 116(B01405). doi:10.1029/2010JB007701
Segall P, Davis JL (1997) GPS applications for geodynamics and earthquake studies. Annu Rev Earth Planet Sci 25(1):301–336
Selle C, Desai S, Garcia Fernandez M, Sibois A (2014) Spectral analysis of GPS-based station positioning time series from PPP solutions. In: 2014 IGS workshop. Pasadena, CA, USA
Serpelloni E, Anzidei M, Baldi P, Casula G, Galvani A (2005) Crustal velocity and strain-rate fields in Italy and surrounding regions: new results from the analysis of permanent and non-permanent GPS networks. Geophys J Int 161(3):861–880
Steigenberger P, Boehm J, Tesmer V (2009) Comparison of GMF/GPT with VMF1/ECMWF and implications for atmospheric loading. J Geod 83(10):943–951
Thatcher W (2003) GPS constraints on the kinematics of continental deformation. Int Geol Rev 45(3):191–212
Teferle FN, Bingley RM, Dodson AH, Penna NT, Baker TF (2002) Using GPS to separate crustal movements and sea level changes at tide gauges in the UK. In: Drewes H et al (eds) Vertical reference systems. Springer-Verlag, Berlin, pp 264–269
Teferle FN, Bingley RM, Williams SDP, Baker TF, Dodson AH (2006) Using continuous GPS and absolute gravity to separate vertical land movements and changes in sea level at tide gauges in the UK. Philos Trans Royal Soc A 364:917–930
Teunissen PJG (1988) Towards a least-squares framework for adjusting and testing of both functional and stochastic models. In: Internal research memo, Geodetic Computing Centre, Delft. A reprint of original 1988 report is also available in 2004, Series on mathematical Geodesy and Positioning, No. 26 http://saegnss1.curtin.edu.au/Publications/2004/Teunissen2004Towards.pdf
Teunissen PJG, Amiri-Simkooei AR (2008) Least-squares variance component estimation. J Geod 82(2):65–82
Tregoning P, Watson C (2009) Atmospheric effects and spurious signals in GPS analyses. J Geophys Res: Solid Earth 114:B09403. doi:10.1029/B006344
Urschl C, Beutler G, GurtnerW Hugentobler U, Schaer S (2007) Contribution of SLR tracking data to GNSS orbit determination. J Adv Space Res 39(10):1515–1523
van Dam T, Wahr J, Milly PCD, Shmakin AB, Blewitt G, Lavallee D, Larson KM (2001) Crustal displacements due to continental water loading. Geophys Res Lett 28(4):651–654
Wahr JM (1985) Deformation induced by polar motion. J Geophys Res 90(B11):9363–9368. doi:10.1029/JB090iB11p09363
Wdowinski S, BockY Zhang J, Fang P, Genrich J (1997) Southern California permanent GPS geodetic array: spatial filtering of daily positions for estimating coseismic and postseismic displacements induced by the 1992 landers earthquake. J Geophys Res: Solid Earth 102(B8):18057–18070
Williams SDP (2003a) The effect of colored noise on the uncertainties of rates estimated from geodetic time series. J Geod 76(9–10):483–494
Williams SDP (2003b) Offsets in global positioning system time series. J Geophys Res: Solid Earth 108(B6):2310. doi:10.1029/2002JB002156
Williams SDP, Bock Y, Fang P, Jamason P, Nikolaidis RM, Prawirodirdjo L, Miller M, Johnson DJ (2004) Error analysis of continuous GPS position time series. J Geophys Res: Solid Earth 109:B03412. doi:10.1029/2003JB002741
Wöppelmann G, Martin Miguez B, Bouin MN, Altamimi Z (2007) Geocentric sea-level trend estimates from GPS analyses at relevant tide gauges world-wide. Glob Planet Change 57(3):396–406
Zhang J, Bock Y, Johnson H, Fang P, Williams S, Genrich J, Wdowinski S, Behr J (1997) Southern California permanent GPS geodetic array: error analysis of daily position estimates and site velocities. J Geophys Res: Solid Earth 102(B8):18035–18055
Zumberge JF, Heflin MB, Jefferson DC, Watkins MM, Webb FH (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Research: Solid Earth 102(B3):5005–5017
Acknowledgements
We are grateful to JPL’s GPS data analysis team for the GPS position time series and to Christina Selle for an informal review. Support for JPL’s time series came from NASA’s Space Geodesy Project and MEaSUREs program. D.F. Argus’s part of this research was performed at the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration. We are also grateful to the associate editor, Prof. Matt King, and three anonymous reviewers for their detailed comments which improved the quality and presentation of this paper.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: models employed within the second IGS reanalysis campaign
1.1 Yaw attitude variations
Inconsistent yaw attitude models affects the precision of the IGS combined clock solutions (Hesselbarth and Wanninger 2008). Therefore, the reliability of the IGS combined clocks is impaired. To diminish the effect of the eclipsing satellites on the IGS clock solutions, consistent modeling of attitude changes is needed (Ray 2009). Distortions in the orientation of the eclipsing satellites follow a simplified yaw attitude model for Block II/IIA and Block IIR satellites (see Kouba 2009a). Attitude behavior of the Block IIF-1 (launched on May 27, 2010) spacecraft during the eclipse has been studied by Dilssner (2010). In addition, with complete modernization of the GLONASS satellites, ACs should include GLONASS observations as well. An appropriate yaw attitude modeling of these satellites may follow the model proposed by Dilssner et al. (2011).
1.2 Modeling of orbit dynamics
Urschl et al. (2007) observed anomalous pattern in the plot of GPS-SLR residuals which they attributed to the GPS orbit mismodeling. This anomalous pattern (particularly, the GPS draconitic year signal) was also identified in the geocenter Z-component (Hugentobler et al. 2006) and GPS position time series (Ray et al. 2008).
One of the potential sources for GNSS orbit mismodeling is the deficiencies in the Earth radiation pressure (ERP) model. Not all IGS ACs are yet modeling ERP. Utilizing a model for Earth radiation, proposed by Rodriguez-Solano et al. (2012), results in the reduction in root mean square (RMS) of orbit’s height component by about 1–2 cm and smaller perturbations of other components related to the orbit. Rodriguez-Solano et al. (2012) showed that the model can compensate the SLR residual bias observed.
The GPS orbit perturbations due to ERP depend on the relative position of Sun, Earth, and satellite. Parts of the observed periodic patterns in GPS time series may stem from failure to correctly model ERP (Rodriguez-Solano et al. 2012). They found that the inclusion of the ERP model results in the reduction in the sixth draconitic signal for the north component at a submillimeter level (equal to reduction of around 38%). Ray (2009) also suggested taking ERP into consideration. Hence, the model proposed by Rodriguez-Solano et al. (2011) has been used within the IGS in the operational reprocessing.
Earth albedo radiation (EAR) is another source for orbit modeling deficiencies. This radiation consists of both visible reflected light and infrared emitted radiation. Most AC contributors have not taken into account the effect of EAR. The albedo acceleration may have a significant effect on the orbit of GPS satellites (a mean reduction in the orbit radial component by 1–2 cm) (Hugentobler et al. 2009). They concluded that for the high-precision GPS orbit determination, EAR and antenna thrust should be taken into consideration. However, regarding the spectra of geocenter and position time series, no significant impact has been observed when the model for EAR was used (Hugentobler et al. 2009). This indicates that there could be still unmodeled effects on the GPS orbit which can be larger than the albedo radiation.
1.3 Geopotential field
In terms of the geopotential model, a new model referred to as EGM2008 has been defined (see Ray 2009). EGM2008 exhibits significant improvements compared to its previous counterpart EGM96, thanks to the availability of CHAMP and most importantly GRACE data in the 2000s. Compared to EGM96, used for the 1st processing campaign, EGM2008 has been modified in the following aspects:
-
1.
Its degree and order have been increased by a factor of 6.
-
2.
Updated value for secular rate of low-degree coefficients.
-
3.
A new model for the mean pole trajectory was proposed.
-
4.
Model for geopotential ocean tide has been updated for FES2004.
-
5.
A new ocean pole tide model has been introduced.
For more information, the reader is referred to IERS 2010 conventions (Petit and Luzum 2010).
1.4 Tidal effects
Tidal effects are categorized to the following two contributions. (1) Tidal displacement of station positions; (2) Tidal EOP variations. For the former, within the new processing campaign, a new model which is introduced for the mean pole trajectory IERS 2010 (Petit and Luzum 2010) has been used for the pole tide correction. Moreover, model for ocean pole tide loading presented by Desai (2002) should be used. For the latter, the Earth rotation axial component in terms of UT1 contains small diurnal and subdiurnal signals. Thus, the tidal gravitation effect on those features of Earth’s mass distribution results in the astronomical precession-nutation of Earth rotation (Brzeziński 2008). A minor part of the astronomical variations, called libration, is a result of the tidal gravitation effect on the non-zonal terms of geopotential (Brzeziński 2008). In case of UT1, the perturbation is semidiurnal with total amplitude up to \(75\,\upmu \hbox {as}\). Brzeziński and Capitaine (2009) studied the subdiurnal libration in UT1. They derived a solution for the structural model of the Earth composing of an elastic mantle and a liquid core not coupling to each other.
A key expectation in tidal EOP variations modeling compared to the 1st reprocessing campaign is the addition of the UT1 libration effect introduced by Brzeziński and Capitaine (2009). It is noted that the maximum effect of UT1 libration is about \(105\,\upmu \hbox {as}\), or 13 mm at GPS altitude. It probably severely aliases into the orbit parameters.
1.5 Tropospheric propagation delay
In the second reprocessing, a new slant delay model (GPT2) was suggested. It improves its older models GPT/GMF with refined horizontal resolution, enhanced temporal coverage, and increased vertical resolution (37 isobaric levels compared to 23 ones utilized for GPT/GMF) (Lagler et al. 2013). In addition to mean value, \(a_0 \), and annual amplitude, A, estimated using the least-squares method in GPT/GMF, semiannual harmonics are incorporated within GPT2. This better accounts for regions with very rainy or dry periods. As for the temperature reduction, in contrast to the GPT/GMF in which a constant \(-6.5\,^{\circ }\hbox {C}/\hbox {km}\) was assumed, mean, annual, and semiannual variations of temperature lapse rate are determined each grid point in GPT2. Regarding the pressure reduction, unlike the GPT/GMF which utilizes an exponential formula based on the standard atmosphere, GPT2 deploys an exponential formula based on virtual temperature (Lagler et al. 2013). The improved performance of GPT2 compared to the previous model GPT/GMF has been examined by Lagler et al. (2013). They have recommended to replace GPT/GMF with GPT2 as an empirical model.
Because of the partial compensation of the atmospheric loading by mismodeling the zenith hydrostatic delays (ZHDs) (Kouba 2009b), GPT-derived ZHDs give rise to a better station height repeatability compared to ECMWF ZHDs if atmospheric loading is not corrected for (Steigenberger et al. 2009). On the other hand, if one needs to examine the coordinates time series to reveal atmospheric loading signals, application of ZHDs derived from numerical weather models is a key element.
1.6 Higher-order ionospheric terms
A linear combination of multi-frequency observations allows for taking into consideration the first-order \({\sim }\frac{1}{f^{2}}\) ionospheric term (Hofmann-Wellenhof et al. 2008). The first-order ionospheric delay is in the order of 1 to 50 meters, which depends on the satellite elevation, ionospheric activities, local time, season and solar cycle (Kedar et al. 2003). The higher-order ionospheric terms, which are in the order of submillimeters to several centimeters, are usually neglected. Kedar et al. (2003) stated that the effect of second-order ionospheric term introduced by Bassiri and Hajj (1993) can likely improve the position repeatability and reduce the small biases in geocenter estimates. Fritsche et al. (2005) and Hernández-Pajares et al. (2007) showed that the second-order ionospheric term affects the geocenter Z-component estimates. Fritsche et al. (2005) processed the double difference phase observation of a global network and compared solutions with and without the higher-order ionospheric terms. They concluded that applying these higher terms will became a standard part of precise GPS applications. IERS 2010 conventions (Petit and Luzum 2010) suggested that while the first- and second-order ionospheric terms are to be considered for GNSS applications, the third order is at the limited significance and the fourth order can be neglected.
1.7 Analysis constraints
Ferland (2010) found that high-frequency smoothing may be due to unremovable continuity constraints for some ACs. Ray (2009) suggested that, for the 2nd reprocessing campaign, ACs constraints and procedures should be reconsidered from the following aspects: (1) Reviewing the necessity of applying constraints, (2) Paying particular attention to the constraint on the orbit and UT1/LOD, (3) Elimination and minimization of the constraints as many as possible, and (4) Better understanding of the impacts of constrains retained is necessary. Accordingly, in the IGS2008 recommendations (http://igs.org/overview/pubs/IGSWorkshop2008/), all ACs should report their a-priori constraints. Although removable constraints are acceptable, unconstrained solutions are preferred. Inner constraints (origin, orientation, scale) are acceptable.
Appendix 2: rate errors in multivariate model
Having r time series available, a multivariate linear model is of the form (Koch 1999)
where vec is the vector operator and \(\otimes \) is the Kronecker product. \(I_r \) is the identity matrix of size r. X and Y are the matrices of the sizes \(n\times r\) and \(m\times r\) collecting unknown parameters and observations from r number of series, respectively. A and \(Q_{\mathrm {vec}\left( Y \right) }\) are, respectively, the functional and stochastic models describing all deterministic effects and statistical characteristics of the observables. E indicates the expectation operator, and D is the dispersion operator.
The following structure for the stochastic model, referred to as the more practical model, is used (Amiri-Simkooei 2009)
where \(Q_\mathrm{k}\)’s are the known cofactor matrices of size \(m\times m\). The matrix \({\Sigma }\) and the unknown factors \(s_\mathrm{k}\) are to be estimated using LS-VCE.
The least-squares estimate of X reads then (Koch 1999)
The covariance matrix of the nr-vector\( \hbox { vec}\!\left( {{{\hat{X}}}} \right) \) is
where \(N=A^{T}Q^{-1}A\) is the normal matrix. Here, we assume that the functional model contains two columns for the linear regression terms plus two columns for each of the annual, semiannual, and tri-annual signal. A is thus of size \(m\times 8\). Its ith row at the time instant \(t_i\) is
Therefore, the unknown parameters are the intercept, rate, and amplitudes of the annual, semiannual, and tri-annual signals. The covariance matrix of the slopes (for all series) is given as \(Q_r ={\Sigma }\times (N^{-1})_{22} \), where \((N^{-1})_{22} \) is the second diagonal element of \(N^{-1}\). It is further assumed that Q matrix has the form
where \(s_\mathrm{w}\), \(s_\mathrm{f}\), \(s_{\mathrm{rw}}\) are the white, flicker, and random walk noise amplitudes, respectively. \(Q_\mathrm{f}\) and \(Q_{\mathrm{rw}}\) are the flicker and random walk noise cofactor matrices, respectively. LS-VCE has been employed to estimate \(s_\mathrm{w}\), \(s_\mathrm{f}\), \(s_{\mathrm{rw}}\), and \({\Sigma }\). As the three coordinate components of all stations have been processed simultaneously, \({\Sigma }\) is of the size \(r\times r\). Its corresponding, north, east, and up components are referred to as \({\Sigma }_N \), \({\Sigma }_E \), and \({\Sigma }_U \), respectively (block diagonals). To compute the white, flicker, and random walk noise rate errors for the east components, matrix Q in Eq. (4) is substituted with \(Q_\mathrm{w} =s_\mathrm{w}I\), \(Q_\mathrm{f} =s_\mathrm{f} Q_\mathrm{f} \) or \(Q_{\mathrm{rw}} =s_{\mathrm{rw}} Q_{\mathrm{rw}}\), respectively. Matrices \(N_\mathrm{w}, N_\mathrm{f}\), \(N_{\mathrm{rw}} \) are then obtained. The rate errors of the east component read
where \(\sigma _\mathrm{r}^\mathrm{w}\), \(\sigma _\mathrm{r}^\mathrm{f}\) and \(\sigma _\mathrm{r}^{\mathrm{rw}}\) are the vector of rate errors for the east component of all stations. Their mean indicate the average error rates over all stations. The corresponding values for the north and up components can accordingly be obtained.
Rights and permissions
About this article

Cite this article
Amiri-Simkooei, A.R., Mohammadloo, T.H. & Argus, D.F. Multivariate analysis of GPS position time series of JPL second reprocessing campaign. J Geod 91, 685–704 (2017). https://doi.org/10.1007/s00190-016-0991-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00190-016-0991-9