
Abstract
This paper considers a non-autonomous modified Leslie–Gower model with Holling type IV functional response and nonlinear prey harvesting. The permanence of the model is obtained, and sufficient conditions for the existence of a periodic solution are presented. Two examples and their simulations show the validity of our results.
Similar content being viewed by others


1 Introduction
It is well known that predation activities are ubiquitous in nature [1]. Modeling of predator-prey interaction has become an important topic in mathematical biology. Song and Yuan [2] studied bifurcation analysis in a predator-prey system with time delay. Ruan and Xiao [3] provided a global analysis in a predator-prey system with a nonmonotonic functional response, and they proved the existence of two limit cycles. Huang and Xiao [4] considered a bifurcation analysis and stability for a predator-prey system with Holling-IV functional response. Xiao and Ruan [5] and Xue and Duan [6] considered time-delay effects to a predator-prey model with Holling-IV type functional response, where stability and bifurcation of periodic solutions were investigated. For the non-autonomous case, Chen [7] proved the existence of two periodic solutions for a model with Holling-IV functional response, and Xia et al. [8] obtained some sufficient conditions for the existence of two periodic solutions in a stage-structured predator-prey model. Li et al. [9] established the existence of multiple periodic solutions for a stage-structured model with harvesting terms. Wang et al. [10] studied the existence of multiple periodic solutions for an impulsive model with a Holling IV type functional response. A two-species model (the so-called LG model) was proposed by Leslie and Gower [11] in 1960. Korobeinikov [12] proved the existence of the limit cycle in such a model. For autonomous predator-prey models with Holling II or III type functional response, the existence of a limit cycle was proved and for the non-autonomous case, the existence of periodic solutions was established. Yu [13] reported some important research for a modified Leslie–Gower model. The Leslie–Gower type predator-prey model with Holling type IV functional response is described by
where \(u\equiv u(t)\) and \(v\equiv v(t)\) are the prey and predator population density, respectively, r and s are intrinsic growth rates of the prey and predator, respectively. K is the carrying capacity of prey population; here m and i denote the maximum per capita predation rate and a measure of the predator’s immunity from or tolerance of the prey, respectively, and a and n are the half saturation constant and the number of prey required to support one predator at equilibrium, respectively. Upadhyay et al. [14] studied that interaction between prey and predator with a Holling type IV functional response. We know that there are three main types of harvesting in the biomodel article: (1) constant rate of harvesting, (2) proportional harvesting \(H(x)=qEx\), and (3) nonlinear harvesting \(H(u)=\frac{qEu}{m_{1}E+m_{2}u}\), where \(m_{1}\), \(m_{2}\) are suitable constants, E is the effort applied to harvest individuals and q is the catchability coefficient. Zhang et al. [15] introduced the nonlinear harvesting \(H(u)=\frac{qEu}{m_{1}E+m_{2}u}\) into model (1.1), and it can be described by
Taking
then system (1.2) becomes
In spite of a lot of works focused on the global dynamics and bifurcation analysis of the ecological systems (e.g., [2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23]), in realistic environment, ecological systems are usually affected by the seasonable perturbations or other unpredictable disturbances (e.g., see [24,25,26,27,28,29,30,31,32,33,34,35,36]). Thus the time-varying parameters are more reasonable when we try to consider the periodic environment. In this paper, we consider the following non-autonomous model:
The rest of this paper is organized as follows. In Sect. 2, we discuss the permanence for the general nonautonomous case. Section 3 is to obtain some sufficient conditions for the existence of periodic solution of system (1.4). Finally, we use numerical simulation to fully demonstrate the existence of our periodic solution.
2 Permanence
In this section, we assume that \(\alpha (t), \gamma (t), h(t), c(t), \delta (t)\), and \(\beta (t)\) are all continuous and bounded above and below by positive constants. Let \(\mathbb{R}_{+}^{2}:=\) \(\{(x,y) \in \mathbb{R}^{2}\mid x\geq 0, y\geq 0 \}\). For a continuous bounded function \(f(t)\) on \(\mathbb{R}\), denote
From a biological viewpoint, we assume that the initial conditions satisfy
Definition 2.1
If a positive solution \((x(t), y(t))\) of system (1.4) satisfies
then system (1.4) is non-persistent.
Definition 2.2
If there exist two positive constants ϕ and \(\varphi (0< \phi < \varphi )\) with
then system (1.4) is permanent.
Define the collections:
The set Γ is defined by
where
Theorem 2.3
If \(S_{1}\cup S_{2}\cup S_{3}\cup S_{4}\neq \emptyset \), then the set Γ is a positively invariant and bounded region with respect to system (1.4).
Proof
Let \((x(t), y(t))\) be any solution of system (1.4) satisfying the initial values \((x(t_{0}), y(t_{0}))=(x_{0}, y_{0}) \in \varGamma \). It suffices to show that all the solutions starting from the point in Γ keep inside Γ. From the first equation of system (1.4), we get
which implies
From the second equation of system (1.4), we obtain
which implies
Similarly, we have
which leads to
Moreover, it follows from the predator equation that
and hence,
This completes the proof of Theorem 2.3. □
Theorem 2.4
Assume that the condition in Theorem 2.3 is satisfied. Then the set Γ is the ultimately bounded region of system (1.4).
3 Periodic case
This section is to obtain some sufficient conditions for the existence of a periodic solution of system (1.4). When we study the non-autonomous periodic system, we focus on obtaining the existence of positive periodic solutions. Therefore, we assume that all the parameters of system (1.4) are periodic in t of period \(\omega > 0\). It is easy to follow from Brouwer’s fixed point theorem that
Theorem 3.1
In addition to the conditions of Theorem 2.3, system (1.4) has at least one positive periodic solution of period ω, say \((x^{*}(t),y^{*}(t))\), which lies in Γ, i.e., \(g _{1}\leq x^{*}(t)\leq G_{2}, g_{2}\leq y^{*}(t)\leq g_{2}(t)\), where \(g_{i}, G_{i}, i=1, 2\), are defined in (2.2).
Alternatively, we can employ another method (coincidence degree theory) to investigate periodic solutions of system (1.4). We adopt the notations and lemmas from [24, 27, 37,38,39]. We denote \(\bar{f}:=\frac{1}{\omega }\int ^{\omega }_{0}f(t)\,dt\) when \(f(t)\) is a periodic and continuous function with period ω (see [31]). Let
and define the collections
Theorem 3.2
If \((S_{1}\cup S_{2}\cup S_{3}\cup S_{4})\cap ( \bar{S}_{1}\cup \bar{S}_{2}\cup \bar{S}_{3})\neq \emptyset \), then system (1.4) has at least one positive ω periodic solution, namely \((x^{*}(t), y^{*}(t))\).
Proof
We make the change of variables:
Then system (1.4) becomes
We denote
Clearly, \(\mathcal{X}\) and \(\mathcal{Y}\) are Banach spaces. Let
We easily see that the inverse \(Kp: \operatorname{Im}L\rightarrow \operatorname{Dom}L\cap \operatorname{ker}P\) exists, and a simple computation leads to
and
Also, it is easy to prove that N is L-compact on Ω̅ with any open bounded set \(\varOmega \subset X\). Now we find an appropriate open bounded subset Ω for the application of the continuation theorem of [24, 37]. According to the equation \(Lx=\lambda Nx, \lambda \in (0, 1)\), we get
Assume that \((\tilde{x}(t), \tilde{y}(t))\) is an arbitrary solution of system (3.1) with certain \(\lambda \in (0, 1)\). Integration on both sides of system (3.2) over the interval \([0, \omega ]\) leads to
According to system (3.2) and (3.3), we get
Since \((\tilde{x}(t), \tilde{y}(t))\in \mathcal{X}\), we know that there exist \(\xi _{i}\) and \(\eta _{i}\in [0, \omega ], i=1,2\), such that
According to the first equation of system (3.3), we have
From systems (3.4) and (3.5), we obtain
According to system (3.5) and the second equation of system (3.3), we have
and hence,
From the first equation of system (3.3), we also obtain
and therefore,
which implies
Thus,
The second equation of system (3.3) also produces
and consequently,
It follows from (3.6)–(3.9) that
We choose \(C>0\) such that \(C>C_{1}+C_{2}\). Let \(\varOmega =\{(\tilde{x}, \tilde{y})\in X\mid \Vert (\tilde{x}, \tilde{y}) \Vert < C\}\). Then it is easy to verify that requirement \((1)\) in the continuation theorem of [24, 37] is satisfied. Also,
In addition, we have \(\operatorname{deg}\{JQN, \varOmega \cap \operatorname{Ker}L,0\}\neq 0\). Thus all the conditions in the continuation theorem are satisfied (see, e.g., [24, 37]). Hence, system (3.1) has at least one ω periodic solution \((\tilde{x}^{*}(t), \tilde{y}^{*}(t))\). It is easy to see that \(x^{*}(t)=\exp {\{\tilde{x}^{*}(t)\}}, y^{*}(t)=\exp {\{\tilde{y} ^{*}(t)\}}\), and then \((x^{*}(t), y^{*}(t))\) is an ω periodic solution of system (1.4). The proof of Theorem 3.2 is complete. □
4 Numerical simulations
To support the previous theoretical analysis, in this section, we present two numerical simulation results for the different coefficients of system (1.4).
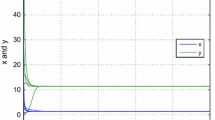
Example 1
Consider the following model:
It is easy to verify that the coefficients of system (1.4) satisfy the conditions in Theorem 3.2. Thus, system (1.4) has a 20-periodic solution. Figure 1 shows the validity of our results.

20-periodic solution
Example 2
Consider the following model:
It is easy to verify that the coefficients of system (1.4) satisfy the conditions in Theorem 3.2. Thus, system (1.4) has a 200-periodic solution. Figure 2 shows the validity of our results.

200-periodic solution
5 Conclusions
This paper considers a non-autonomous modified Leslie–Gower model with Holling type IV functional response and nonlinear prey harvesting. We study the permanence of the model. Sufficient conditions are obtained for the existence of a periodic solution by Brouwer fixed point theorem and coincidence degree theory, respectively. Also, we give examples and simulations to verify our theoretical analysis.
References
Taylor, R.: Predation. Chapman and Hall, New York (1984)
Song, Y., Yuan, S.: Bifurcation analysis in a predator-prey system with time delay. Nonlinear Anal., Real World Appl. 7(2), 265–284 (2006)
Ruan, S., Xiao, D.: Global analysis in a predator-prey system with nonmonotonic functional response. SIAM J. Appl. Math. 61, 1445–1472 (2001)
Huang, J., Xiao, D.: Analysis of bifurcations and stability in a predator-prey system with Holling type-IV functional response. Acta Math. Appl. Sin. Engl. Ser. 20, 167–178 (2004)
Xiao, D., Ruan, S.: Multiple bifurcations in a delayed predator-prey system with nonmonotonic functional response. J. Differ. Equ. 176, 494–510 (2001)
Xue, Y., Duan, X.: The dynamic complexity of a Holling type-IV predator-prey system with stage structure and double delays. Discrete Dyn. Nat. Soc. 2011, Article ID 509871 (2011)
Chen, Y.: Multiple periodic solution of delayed predator-prey systems with type IV functional responses. Nonlinear Anal., Real World Appl. 5(1), 45–53 (2004)
Xia, Y., Cao, J., Cheng, S.: Multiple periodic solutions of a delayed stage-structured predator-prey model with non-monotone functional responses. Appl. Math. Model. 31(9), 1947–1959 (2007)
Li, Z., Zhao, K., Li, Y.: Multiple positive periodic solutions for a non-autonomous stage-structured predatory-prey system with harvesting terms. Commun. Nonlinear Sci. Numer. Simul. 15(8), 2140–2148 (2010)
Wang, Q., Dai, B., Chen, Y.: Multiple periodic solutions of an impulsive predator-prey model with Holling-type IV functional response. Math. Comput. Model. 49(9–10), 1829–1836 (2009)
Leslie, P., Gower, J.: The properties of a stochastic model for the predator-prey type of interaction between two species. Biometrika 47, 219–234 (1960)
Korobeinikov, A.: A Lyapunov function for Leslie–Gower predator-prey models. Appl. Math. Lett. 14(6), 697–699 (2001)
Yu, S.: Global stability of a modified Leslie-Gower model with Beddington–DeAngelis functional response. Adv. Differ. Equ. 2014, 84 (2014)
Upadhyay, R., Iyengar, S.: Introduction to Mathematical Modelling and Chaotic Dynamics. CRC Press, Taylor and Francis Group, London (2013)
Zhang, Z., Upadhyay, R., Datta, J.: Bifurcation analysis of a modified Leslie–Gower model with Holling type IV functional response and nonlinear prey harvesting. Adv. Differ. Equ. 2018, 127 (2018)
Huang, C., Zhao, X., Wang, X., Wang, Z., Xiao, M., Cao, J.: Disparate delays-induced bifurcations in a fractional-order neural network. J. Franklin Inst. 356(5), 2825–2846 (2019)
Zhang, B., Zhuang, J., Liu, H., Cao, J., Xia, Y.: Master-slave synchronization of a class of fractional-order Takagi–Sugeno fuzzy neural networks. Adv. Differ. Equ. 2018, 473 (2018)
Huang, C., Cao, J.: Impact of leakage delay on bifurcation in high-order fractional BAM neural networks. Neural Netw. 98, 223–235 (2018)
Huang, C., Li, T., Cai, L., Cao, J.: Novel design for bifurcation control in a delayed fractional dual congestion model. Phys. Lett. A 383(5), 440–445 (2019)
Yu, X., Yuan, S., Zhang, T.: Survival and ergodicity of a stochastic phytoplankton-zooplankton model with toxin-producing phytoplankton in an impulsive polluted environment. Appl. Math. Comput. 347(15), 249–264 (2019)
Xu, C., Yuan, S., Zhang, T.: Average break-even concentration in a simple chemostat model with telegraph noise. Nonlinear Anal. Hybrid Syst. 29, 373–382 (2018)
Zhang, T., Liu, X., Meng, X., Zhang, T.: Spatio-temporal dynamics near the steady state of a planktonic system. Comput. Math. Appl. 75(12), 4490–4504 (2018)
Huang, C., Li, H., Cao, J.: A novel strategy of bifurcation control for a delayed fractional predator-prey model. Appl. Math. Comput. 347, 808–838 (2019)
Fan, M., Wang, Q., Zou, X.: Dynamics of a non-autonomous ratio-dependent predator-prey system. Proc. R. Soc. Edinb. A 133, 97–118 (2003)
Liu, B., Teng, Z., Chen, L.: Analysis of a predator-prey model with Holling II functional response concerning impulsive control strategy. J. Comput. Appl. Math. 193(1), 347–362 (2006)
Meng, X., Zhao, S., Feng, T., Zhang, T.: Dynamics of a novel nonlinear stochastic SIS epidemic model with double epidemic hypothesis. J. Math. Anal. Appl. 433(1), 227–242 (2016)
Xia, Y.: Periodic solution of certain nonlinear differential equations: via topological degree theory and matrix spectral theory. Int. J. Bifurc. Chaos 22(8), 940287 (2012)
Nie, L., Teng, Z., Hu, L., Peng, J.: The dynamics of a Lotka–Volterra predator-prey model with state dependent impulsive harvest for predator. Biosystems 98, 67–72 (2009)
Song, J., Hu, M., Bai, Y., Xia, Y.: Dynamic analysis of a non-autonomous ratio-dependent predator-prey model with additional food. J. Appl. Anal. Comput. 8(6), 1893–1909 (2018)
Song, Y., Tang, X.: Stability, steady-state bifurcations, and turing patterns in a predator-prey model with herd behavior and prey-taxis. Stud. Appl. Math. 139(3), 371–404 (2017)
Wei, F.: Existence of multiple positive periodic solutions to a periodic predator-prey system with harvesting terms and Holling III type functional response. Commun. Nonlinear Sci. Numer. Simul. 16(4), 2130–2138 (2011)
Wei, F., Fu, Q.: Hopf bifurcation and stability for predator-prey systems with Beddington–DeAngelis type functional response and stage structure for prey incorporating refuge. Appl. Math. Model. 40(1), 126–134 (2016)
Yuan, S., Xu, C., Zhang, T.: Spatial dynamics in a predator-prey model with herd behavior. Chaos 23, 033102 (2013)
Zhang, T., Zhang, T., Meng, X.: Stability analysis of a chemostat model with maintenance energy. Appl. Math. Lett. 68, 1–7 (2017)
Bai, Y., Li, Y.: Stability and Hopf bifurcation for a stage-structured predator-prey model incorporating refuge for prey and additional food for predator. Adv. Differ. Equ. 2019, 42 (2019)
Zhang, Z., Hou, Z.: Existence of four positive periodic solutions for a ratio-dependent predator-prey system with multiple exploited (or harvesting) terms. Nonlinear Anal., Real World Appl. 11(3), 1560–1571 (2010)
Gaines, R., Mawhin, J.: Coincidence Degree and Nonlinear Differential Equations. Springer, Berlin (1977)
Zhang, T., Liu, J., Teng, Z.: Existence of positive periodic solutions of an SEIR model with periodic coefficients. Appl. Math. 57(6), 601–616 (2012)
Zheng, H., Guo, L., Bai, Y., Xia, Y.: Periodic solutions of a non-autonomous predator-prey system with migrating prey and disease infection: via Mawhin’s coincidence degree theory. J. Fixed Point Theory Appl. 21, 37 (2019)
Availability of data and materials
All data are fully available without restriction.
Funding
This work was supported by the National Natural Science Foundation of China (No. 11671176), the Natural Science Foundation of Fujian Province (No. 2018J01001), the Start-up Fund of Huaqiao University (Z16J0039), China Postdoctoral Science Foundation (No. 2014M551873), and Subsidized Project for Postgraduates’ Innovative Fund in Scientific Research of Huaqiao University (18011020008).
Author information
Authors and Affiliations
Contributions
All authors have the same contributions. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Song, J., Xia, Y., Bai, Y. et al. A non-autonomous Leslie–Gower model with Holling type IV functional response and harvesting complexity. Adv Differ Equ 2019, 299 (2019). https://doi.org/10.1186/s13662-019-2203-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-019-2203-4