
Abstract
In this paper, a model of discrete delayed quaternion-valued neural networks with interval parameter uncertainties is considered. Some sufficient conditions for the existence, uniqueness and globally robust stability of the equilibrium point are obtained. The approach is on the basis of the homeomorphic mapping method, the Lyapunov stability theorem and inequality techniques. Finally, a numerical example is given to demonstrate the application of the obtained results.
Similar content being viewed by others

1 Introduction
Since neural networks had been proposed in the 1940s, they have been widely studied by many researchers, due to the many applications in various areas, such as associative memory, optimization, pattern recognition, fault diagnosis and signal processing. A lot of excellent work as regards the real-valued neural networks (RVNNs) and complex-valued neural networks (CVNNs) has appeared in the study of their dynamics [1,2,3,4,5,6]. However, there are some problems that the RVNNs and the CVNNs cannot deal with straightforwardly, such as 4-D signals, body images which are four or more dimensional [7,8,9], new methods or theories have to be put forward to, the theory of quaternion-valued neural networks (QVNNs) is one of those approaches, since it can handle not only real-valued and complex-valued cases but also the multidimensional data. For details, see Refs. [10,11,12,13,14,15,16,17].
In the practical system, due to the internal and external disturbances, the stability may be destroyed and this may bring about many faults and problems. On the other hand, the inaccurate measurement, owing to technical reasons, will also result in the instability of the systems. The general stability cannot describe the complete inner characters of the systems, so it is quite necessary to refer to robust stability, while discussing the neural networks with interval parameter uncertainties. So far, a large number of authors in the literature have considered the important and interesting issue, some sufficient conditions have been established to guarantee existence, uniqueness and robust stability of the equilibrium point for RVNNs and CVNNs with interval parameter uncertainties [18,19,20,21,22,23,24,25].
Moreover, between neurons, there exists a limited transmission speed, it is inevitable to see the delayed phenomenon in the neural networks, thus delays become one of the essential parts in analyzing its dynamics. Compared to the general systems, the dynamics of neural networks with delays becomes more complicated and it may lead to volatility, instability and even chaos. In fact, some authors also have considered the existence, uniqueness and global stability of the equilibrium point for delayed quaternion-valued neural networks [14, 26,27,28,29,30,31,32,33,34].
Although the work above is very excellent, little research considered robust stability of quaternion-valued neural networks with delay and interval parameter uncertainties. Recently, Chen in [35, 36] considered the robust stability with different kinds of delays for quaternion-valued neural networks, some sufficient conditions have also been obtained about the existence, uniqueness and global asymptotic robust stability. But in his judging criteria, the negative definiteness of two matrices is needed, moreover, the entries in these matrices are all the maximal values, which are decided by the absolution of the upper and lower bounds of elements for the connection weight matrix, the sign of connection weight matrix is ignored. In this article, inspired by the methods of [20], we proposed a new approach to overcome this defects, in our unique criteria matrix, the given elements depend on not only the lower bounds but also the upper bounds of the interval parameters, which is different from previous contributions and extends the relevant work in Refs. [19, 20, 22, 27, 35].
The rest of this paper is arranged as follows. In Sect. 2, the discrete delayed QVNN model is proposed, some basic knowledge, preliminaries and lemmas are also presented. Our main results are given in Sect. 3, in which the sufficient condition for the existence, uniqueness and global robust stability of the equilibrium point are obtained relying on The homeomorphic mapping method, the Lyapunov stability theorem and inequality techniques. In order to illustrate the effectiveness of our main results, the numerical simulation is addressed in Sect. 4, and then the relevant conclusions at the end.
2 Problem formulation and preliminaries
For convenience, we give some notations used throughout this paper before introducing the model.
\(\mathbb{R}\), \(\mathbb{C}\) and \(\mathbb{H}\) mean the real field, complex field and the skew field of quaternions, respectively. \(\mathbb{R} ^{n \times m}\), \(\mathbb{C}^{n \times m}\) and \(\mathbb{H}^{n \times m}\) denote \(n \times m\) real-valued matrices, complex-valued matrices, and quaternion-valued matrices, respectively. Ā, \(A^{T}\) and \(A^{*}\) denote the conjugate, the transpose and the conjugate transpose of matrix A, respectively. Let \(\Vert z \Vert \) denote the norm of \(z \in \mathbb{C}^{n}\), where \(\Vert z \Vert = \sqrt{z^{*}z}\), and \(\Vert A \Vert \) means the norm of \(A \in \mathbb{C}^{n}\). The symbol I denotes the identity matrix with appropriate dimensions. \(\lambda _{\max }(P)\) and \(\lambda _{\min }(P)\) stand for the largest and the smallest eigenvalue of the Hermitian matrix P. The notation \(X \geq Y\) (respectively, \(X > Y\)) means that \(X - Y\) is a positive semi-definite (respectively, positive definite). Moreover, the notation ⋆ means the conjugate transpose of a suitable block in a Hermitian matrix.
As for quaternion-valued operation and related issues, we can refer to [35]. Note that, if \(p, q \in \mathbb{H}\) with \(p = p_{0} + p_{1}\imath + p_{2}\jmath + p_{3}\kappa \), \(q = q_{0} + q _{1}\imath + q_{2}\jmath + q_{3}\kappa \), then \(p \preceq q\) denotes \(p_{i} \leq q_{i}\) (\(i=0, 1, 2, 3\)). If \(A, B \in \mathbb{H}^{n \times n}\) with \(A = (a_{ij})_{n \times n}\) and \(B = (b_{ij})_{n \times n}\), then \(A \preceq B\) denotes \(a_{ij} \preceq b_{ij}\) (\(i = 1, 2,\ldots, n\)). For \(A \in H^{n \times n}\), let \(A^{R}\), \(A^{I}\), \(A^{J}\) and \(A^{K}\) be the real part and three imaginary components.
2.1 Model description
In this paper, we consider the following discrete delayed QVNNs with interval parameter uncertainties:
where \(q(t) = (q_{1}(t), q_{2}(t),\ldots,q_{n}(t) )^{T} \in \mathbb{H}^{n}\), \(q_{i}(t)\) is the state of the ith neural neuron of the neural network at time t, \(\delta \geq 0\) and \(\tau \geq 0\) represent the leakage delay and transmission delay, respectively, \(f(q(t) ) = (f_{1} (q_{1}(t) ), f_{2} (q_{2}(t) ),\ldots,f_{n} (q_{n}(t) ) )^{T} \in \mathbb{H}^{n}\) refers to the neuron activation function, \(C = \operatorname{diag}\{c_{1}, c_{2},\ldots,c_{n} \} \in \mathbb{R}_{d}^{n \times n}\) with \(c_{i} > 0\) is the self-feedback connection weight matrix, \(A \in \mathbb{H}^{n \times n}\) is the connection weight matrix, \(B \in \mathbb{H}^{n \times n}\) is the delayed connection weight matrix, \(J = (J_{1}, J_{2},\ldots,J_{n})^{T} \in \mathbb{H}^{n}\) refers to the input vector.
Next, we will consider the dynamical behaviors of system (1).
Some assumptions as regards Eq. (1) are given first:
- (\(\mathbf{A}_{1}\)):
-
For \(i \in \{1,2,\ldots,n\}\), the neuron activation function \(f_{i}\) is continuous and satisfies
$$ \bigl\vert f_{i}(\varphi _{1}) - f_{i}( \varphi _{2}) \bigr\vert \leq k_{i} \vert \varphi _{1} - \varphi _{2} \vert , \quad \forall \varphi _{1}, \varphi _{2} \in \mathbb{H}, $$where \(k_{i}\) is a real-valued positive constant; in the next proof, we define \(K = \operatorname{diag}\{k_{1}, k_{2},\ldots, k_{n}\}\).
- (\(\mathbf{A}_{2}\)):
-
The matrices C, A, B and J in model (1) are included in the following sets, respectively:
$$\begin{aligned}& C_{I} = \bigl\{ C \in \mathbb{R}_{d}^{n \times n}: 0 \prec \check{C} \preceq C \preceq \hat{C}, \check{C}, \hat{C} \in \mathbb{R} _{d}^{n \times n} \bigr\} , \\& A_{I} = \bigl\{ A \in \mathbb{H}^{n \times n}: \check{A} \preceq A \preceq \hat{A}, \check{A}, \hat{A} \in \mathbb{H}^{n \times n} \bigr\} , \\& B_{I} = \bigl\{ B \in \mathbb{H}^{n \times n}: \check{B} \preceq B \preceq \hat{B}, \check{B}, \hat{B} \in \mathbb{H}^{n \times n} \bigr\} , \\& J = \bigl\{ J \in \mathbb{H}^{n}: \check{J} \preceq J \preceq \hat{J}, \check{J}, \hat{J} \in \mathbb{H} ^{n} \bigr\} , \end{aligned}$$where \(\check{C} = \operatorname{diag} \{\check{c}_{1}, \check{c}_{2},\ldots,\check{c} _{n}\}\), \(\hat{C} =\operatorname{diag}\{\hat{c}_{1}, \hat{c}_{2},\ldots,\hat{c} _{n}\}\), \(\check{A} = (\check{a}_{ij})_{n \times n}\), \(\hat{A} = ( \hat{a}_{ij})_{n \times n}\), \(\check{B} = (\check{b}_{ij})_{n \times n}\), \(\hat{B} = (\hat{b}_{ij})_{n \times n}\).
Before analyzing the existence, uniqueness and robust stability of the equilibrium point in system (1), we need clear some definitions and notation.
For every \(A_{i}=A_{i}^{R} + \imath A_{i}^{I} + \jmath A_{i}^{J} + \kappa A_{i}^{K}\), \(B_{i}=B_{i}^{R} + \imath B_{i}^{I} + \jmath B_{i} ^{J} +\kappa B_{i}^{K}\in \mathbb{H}^{n \times n}\), \(i=0,1 \), let
Obviously, \(A_{1}^{X} \succeq 0\), \(B_{1}^{X}\succeq 0\), here X expresses R, I, J, K, respectively, and \(C_{1} \succeq 0\), let \(e_{i} = (0,0,\ldots,1,\ldots,0)^{T}_{n \times 1}\) where 1 belongs to the ith value in the unit row vector, define
It is obvious that
Moreover, we define
2.2 Basic lemmas
The following lemmas will play important roles in the proof of our main results.
Lemma 1
Let \(\varSigma ^{*} = \{\varSigma \in \mathbb{R}^{n^{2} \times n^{2}} : \varSigma = \operatorname{diag}(\varepsilon _{11} ,\ldots, \varepsilon _{1n} ,\ldots, \varepsilon _{n1} ,\ldots, \varepsilon _{nn}), \textit{where } {\vert \varepsilon _{ij} \vert \leq 1}, i,j = 1,2,\ldots,n\}\), then \(\varSigma ^{T}\varSigma \leq I\). Furthermore, let
then for \(\varSigma _{C}, \varSigma _{A}^{R}, \varSigma _{A}^{I}, \varSigma _{A}^{J}, \varSigma _{A}^{K}, \varSigma _{B}^{R}, \varSigma _{B}^{I}, \varSigma _{B}^{J}, \varSigma _{B}^{K} \in \varSigma ^{*}\), \(C_{I} = \widetilde{C}\), \(A_{I} = \widetilde{A}\), \(B_{I} = \widetilde{B}\).
Proof
The result can easily proved through calculation directly, which is similar to the approach in [20]. So the details are omitted. □
Lemma 2
([20])
If \(U_{i}\), \(V_{i}\) and \(W_{i}\) (\(i = 1,2,\ldots,m\)) are complex-valued matrices of appropriate dimension with M satisfying \(M^{*} = M\), then
for all \(V_{i}^{*}V_{i} \leq I\) (\(i=1, 2,\ldots,m\)), if and only if there exist positive constants \(\varepsilon _{i}\) (\(i=1, 2,\ldots,m\)) such that
Lemma 3
([19])
For a given Hermitian matrix, if \(S_{11}^{*} = S_{11}\), \(S_{12}^{*} = S_{21}\) and \(S_{22}^{*} = S_{22}\), then
is equivalent to the following conditions:
-
(i)
\(S_{22}<0\) and \(S_{11}-S_{12}S_{22}^{-1}S_{21}<0\),
-
(ii)
\(S_{11}<0\) and \(S_{22}-S_{21}S_{11}^{-1}S_{12}<0\).
Lemma 4
([35])
For any \(a, b \in \mathbb{H}^{n}\), if \(P \in \mathbb{H}^{n \times n}\) is a positive definite Hermitian matrix, then
Lemma 5
([35])
If \(H(z)\): \(\mathbb{H}^{n} \rightarrow \mathbb{H}^{n}\) is a continuous map and satisfies the following conditions:
-
(i)
\(H(z)\) is injective on \(\mathbb{H}^{n}\),
-
(ii)
\(\lim_{ \Vert z \Vert \to \infty } \Vert H(z) \Vert =\infty \),
then \(H(z)\) is a homeomorphism of \(\mathbb{H}^{n}\) onto itself.
Lemma 6
([35])
For any positive definite constant Hermitian matrix \(W \in \mathbb{H} ^{n \times n}\) and any scalar function \(\omega (s)\): \([a,b] \rightarrow \mathbb{H}^{n}\), if the integrations concerned are well defined, then
Lemma 7
([10])
Let \(A = A_{1} + A_{2\jmath }\) and \(B = B_{1} + B_{2\jmath }\), where \(A_{1}, A_{2}, B_{1}, B_{2} \in \mathbb{C}^{n \times n}\) and \(A, B \in \mathbb{H}^{n \times n}\), then
-
(i)
\(A^{*} = A_{1}^{*} - A_{2\jmath }^{T}\);
-
(ii)
\(AB = (A_{1}B_{1} - A_{2}\bar{B}_{2}) + (A_{1}B_{2} + A _{2}\bar{B}_{1})_{\jmath }\),
where \(\bar{B}_{1}\) and \(\bar{B}_{2}\) denote the conjugate matrices of \(B_{1}\) and \(B_{2}\), respectively.
Lemma 8
([10])
Let \(P \in \mathbb{H}^{n \times n}\) be a Hermite matrix, \(P = P_{1} + P_{2j}\), then \(P<0\) is equivalent to
where \(P_{1}, P_{2}\in \mathbb{C}^{n \times n}\) and \(\bar{P}_{1}\), \(\bar{P}_{2}\) denote the conjugate matrices of \(P_{1}\), \(P_{2}\), respectively.
3 Global robust stability results
In this section, we will present the existence and uniqueness of the equilibrium point of the delayed QVNNs on the basis of Assumptions (\(\mathbf{A} _{1}\)) and (\(\mathbf{A}_{2}\)), then we investigate the global robust stability of the equilibrium point of the delayed QVNNs.
Theorem 1
Assume assumptions (\(\mathbf{A}_{1}\)) and (\(\mathbf{A}_{2}\)) are satisfied, then QVNNs (1) has a unique equilibrium point which is globally robust stable, if there exist a positive definite Hermitian matrix Q and four positive diagonal matrices \(R_{i}\) (\(i = 1, 2, 3, 4\)), and 27 positive constants \(\lambda _{i}\) (\(i=1,2,\ldots,27\)) such that the following linear matrix inequality holds:
where
the other entries of Ω are zeros.
Proof
We will prove the theorem in three steps.
Step 1: The negative definiteness of the following matrix Δ is equivalent to the negative definiteness of matrix Ω,
where
From Lemma 1, for any \(C \in C_{I}\), \(A \in A_{I}\), \(B \in B_{I}\), we obtain
Note that, for \((\varSigma _{C}), (\varSigma _{A}^{X}), (\varSigma _{B}^{X}) \in \varSigma ^{*}\), here X expresses R, I, J, K, respectively, it is to get \((\varSigma _{A}^{X})^{T}\varSigma _{A}^{X} \leq I\), \((\varSigma _{B}^{X})^{T} \varSigma _{B}^{X} \leq I\), \((\varSigma _{C})^{T}\varSigma _{C} \leq I\).
Taking (4), (5), (6) into (3), we obtain
Here, \((X\varepsilon _{i})_{n^{2} \times 7n}\) denotes a block matrix with the matrix \(X_{n^{2}\times n}\) lies in the ith column, here \(i=1,2,\ldots, 7\),
From Lemma 2 we can see that \(\Delta < 0\) if and only if there exist positive constants \(\lambda _{i}\) (\(i=1,2,\ldots, 27\)) such that
Rewrite (7) in the form of Lemma 3 and by direct calculation, we have \(\bar{\Delta }=S_{11}-S_{12}S_{22}^{-1}S_{21}\), on the other hand . It is obvious that \(S_{22}<0\). Here, \((S_{11})_{7n \times 7n}\), \((S_{12})_{7n \times 27n}\), \((S_{21})_{27n \times 7n}\), \((S_{22})_{27n \times 27n}\) are the sub-block matrices of the judging matrix Ω. We find that (7) is equivalent to (2) by Lemma 3. Because \(\bar{\Delta }<0\) is equivalent to \(\varOmega < 0\), thus, \(\Delta < 0\) and \(\varOmega < 0\) are equivalent.
Step 2: We will show system (1) has a unique equilibrium point under the condition \(\Delta < 0\). Let q̃ be an equilibrium point of the system, then q̃ satisfies
Let \(\mathcal{F}(q) = - Cq + Af(q) + Bf(q) + J\). In the following, we prove the map \(\mathcal{F}: \mathbb{H}^{n} \rightarrow \mathbb{H}^{n}\) is a homeomorphism map.
Firstly, we prove that \(\mathcal{F}(q)\) is an injective map on \(\mathbb{H}^{n}\).
Supposing there exist \(q_{1},q_{2} \in \mathbb{H}^{n}\) with \(q_{1} \neq q_{2}\) such that \(\mathcal{F}(q_{1}) = \mathcal{F}(q_{2})\), then we can get
Left-multiplying both sides of (8) by \((q_{1} - q_{2})^{*}Q\) leads to
Taking the conjugate transpose on both sides of (9), we have
Summing (9) and (10) results in
From Δ< 0, we see
Hence, from (12) (13) we can get
By Lemma 3, we obtain
Considering equality (11) and the negative definite quality of \(R_{4} - R_{1}\) and \(R_{2} + R_{4}\), it is easy to obtain the following inequality by Lemma 4:
Since \(R_{1}\) and \(R_{2}\) is real-valued positive diagonal matrix, we can see from Assumptions (\(\mathbf{A}_{1}\)) that
Then, by (15) and (16), we get
From inequalities (14) and (17), we can get \(q_{1} = q_{2}\), which contradicts the supposed condition. Hence, \(\mathcal{F}(q)\) is an injective map on \(\mathbb{H}^{n}\).
Secondly, we prove that \(\Vert \mathcal{F}(q) \Vert \rightarrow + \infty \) as \(\Vert q \Vert \rightarrow +\infty \).
From the definition of \(\mathcal{F}(q)\), we can get
Left-multiplying both sides of (18) by \(q^{*}Q\) brings about
Taking the conjugate transpose on equality (19), we have
Summing (19) and (20) one derives that
Similar to the proof of the injective map, we obtain
where
Applying the Cauchy–Schwarz inequality brings about
So, \(\Vert \mathcal{F}(q) \Vert \rightarrow + \infty \) as \(\Vert q \Vert \rightarrow + \infty \), by Lemma 5, we know that \(\mathcal{F}(q)\) is a homeomorphism of \(\mathbb{H}^{n}\). Therefore, system (1) has a unique equilibrium point.
Step 3: We will analyze the globally asymptotic robust stability of the equilibrium point.
Let \(z(t) = q(t) - \tilde{q}\), then system (1) can be rewritten as
where \(h (z(t) ) = f (q(t) ) - f(\tilde{q}) \) and \(h (z(t - \tau ) ) = f (q(t - \tau ) ) - f(\tilde{q})\).
Considering the following Lyapunov function:
where
Calculating the time-derivative of \(V_{1}(t)\), \(V_{2}(t)\), \(V_{3}(t)\), \(V_{4}(t)\) and \(V_{5}(t)\), we can get
By Lemma 6, enlarging the equation \(\dot{V}_{3}(t)\)
Further, for real-valued positive diagonal matrices \(R_{1}\) and \(R _{2}\), we can get from Assumption (\(\mathbf{A}_{1}\))
From system (22), we obtain
It follows from (28) to (35) that
By Lemma 4, we can deduce that
Combining (37) with (36), we have
where \(\xi ^{*}(t) = [z^{*}(t), h^{*}(z(t)), h^{*}(z(t - \tau )), (\int _{t - \delta }^{t}z(s)\,ds )^{*}, ( - z^{*}(t - \delta ) ), z^{*}(t - \tau ), \dot{z}^{*}(t) ]\).
Obviously, \(\dot{V}(t) \leq 0\) since \(\Delta < 0\).
By making use of Lyapunov theory, we derive that the unique equilibrium point q̃ in system (1) is globally robust stable.
The proof is completed. □
Remark 1
In [20], the authors discussed the robust stability of complex-valued neural networks with interval parameter uncertainties and obtained the existence, uniqueness and global robust stability of the equilibrium, we add the leak delay, extend the model to quaternion-valued neural networks and obtain the corresponding results under the relatively weak conditions. Namely, in system (1), when \(\delta = 0\), \(q(t) \in C^{n}\) and \(C, A, B, J \in C^{n\times n}\), it is easy to get the relevant conclusions of the literature [20] by our Theorem 1.
Remark 2
In the literature [35], the negative definiteness of two judging matrices is needed, moreover, the entries in these matrices are all the maximal values, which rely on resolving of the upper and lower bounds of elements for the connection weight matrix, the sign of connection weight matrix is ignored, but in our article, the given elements depend on not only the lower bounds but also the upper bounds of the interval parameters, which is different from previous contributions and extends the relevant work in Refs. [19, 20, 22, 35].
Since LMI (2) is defined in \(\mathbb{H}^{n \times n}\), we cannot handle it directly using the Matlab LMI toolbox, in order to simulate our results, it is an effective way to turn the quaternion LMI into a complex one. In the following, the following corollary is required theoretically, which can easily be obtained by Theorem 1 of our article.
Expressing the parameters as pairs of complex parts, \(A_{0}^{R} + \imath A_{0}^{R} + \jmath A_{0}^{J} + \kappa A_{0}^{K} = A_{0}^{R} + \imath A_{0}^{R} + (A_{0}^{J} + \imath A_{0}^{K}) \jmath = A_{1} + A _{2 \jmath }\) and \(B_{0}^{R} + \imath B_{0}^{R} + \jmath B_{0}^{J} + \kappa B_{0}^{K} = B_{0}^{R} + \imath B_{0}^{R} + (B_{0}^{J} + \imath B_{0}^{K}) \jmath = B_{1} + B_{2 \jmath }\), where \(A_{1}, A_{2}, B_{1}, B_{2} \in \mathbb{C}^{n \times n}\), then we have the following result.
Corollary 1
Supposing assumptions (\(\mathbf{A}_{1}\)) and (\(\mathbf{A}_{2}\)) valid, then system (1) is globally robust stable, if there exist a positive definite Hermitian matrix \(Q_{1} \in \mathbb{C}^{n \times n}\), a skew-symmetric matrix \(Q_{2} \in \mathbb{C}^{n \times n}\), four real positive diagonal matrices \(R_{i} \in \mathbb{R}^{n \times n}\) (\(i=1,2,3,4\)), 27 positive constants \(\lambda _{i}\) (\(i=1,2,\ldots,27\)), such that the following CVLMIs hold:
where \(\varOmega _{1}\) and \(\varOmega _{2}\) are defined in (40) and (41),
where
where
and the other ones in \(\varOmega _{1}\) and \(\varOmega _{2}\) are zeros.
Proof
Based on Lemmas 7 and 8 and Theorem 1, the result easily can be checked. □
4 Numerical example
In this section, we will demonstrate the effectiveness of our obtained results by the following example.
Example 1
Assume that the parameters of QVNNs (1) are given as follows:
where
Then we choose the following activation function of the QVNNs (1):
It is obvious that the function satisfies Assumption (\(\mathbf{A}_{1}\)) and Assumption (\(\mathbf{A}_{2}\)). Applying YALMIP with the solver of SDPT3 in MATLAB, we obtain the following feasible solution to the LMI (2) in Theorem 1:
Thus, the condition of Theorem 1 is satisfied, then system (1) has a unique equilibrium point and the equilibrium point is globally robust stable.
In the following, we choose the following fixed network parameters:
where
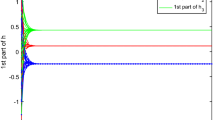
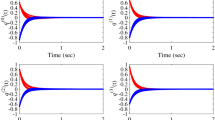
Figures 1, 2, 3 and 4 depict the four parts of the states of the considered quaternion-valued neural network system. It can be seen from these figures that each neuron state converges to the stable equilibrium point, which is \((0.1701-0.1674 \imath -0.3335\jmath +0.0830\kappa , -0.3366+0.1673\imath +0.0838 \jmath -0.1662\kappa , 0.1836+0.1812\imath +0.3633\jmath +0.9083 \kappa )^{T}\).

The first part of the state trajectories for system (1) with parameters

The second part of the state trajectories for system (1) with parameters

The third part of the state trajectories for system (1) with parameters

The fourth part of the state trajectories for system (1) with parameters
5 Conclusion
In this paper, the issue of globally robust stability of delayed quaternion-valued neural networks with interval parameter uncertainties has been investigated by using a quaternion-valued inequality, a Lyapunov function and a homeomorphic mapping, some new sufficient conditions to the existence, uniqueness and global robust stability of the equilibrium point for delayed quaternion-valued neural networks with interval parameter uncertainties have been derived. To the study of [20] we add the leak delay, extend the model to quaternion-valued neural networks and obtain the corresponding results under the relatively weak conditions. In addition, the elements of a given unique criteria matrix in our proposed results depend on not only the lower bounds but also the upper bounds of the interval parameters, which is less conservative than some previous contributions [19, 22, 27, 35].
We would like to point out that more quaternion-valued neural networks can be generalized based on our main results such as discrete-time neural networks [26], stochastic perturbations [37], and Markovian jumping parameters [38]. As future work, we plan to focus on discrete-time quaternion-valued neural networks with linear threshold function, the relevant results will be presented in the near future.
References
Petersen, I.R., Hollot, C.V.: A Riccati equation approach to the stabilization of uncertain linear systems. Automatica 22(4), 397–416 (1986)
Xie, L., Fu, M., de Souza, C.E.: \(H_{\infty }\) control and quadratic stabilization of systems with parameter uncertainty via output feedback. IEEE Trans. Neural Netw. Learn. Syst. 37(8), 1253–1256 (1992)
Zhou, W., Zurada, J.M.: Discrete-time recurrent neural networks with complex-valued linear threshold neurons. IEEE Trans. Circuits Syst. 56(8), 669–673 (2009)
Xu, D., Zhang, H., Mandic, D.P.: Convergence analysis of an augmented algorithm for fully complex-valued neural networks. Neural Netw. 69, 44–50 (2015)
Zhou, B., Song, Q.: Boundedness and complete stability of complex-valued neural networks with time delay. IEEE Trans. Neural Netw. Learn. Syst. 24(8), 1227–1238 (2013)
Guo, R., Zhang, Z., Gao, M.: State estimation for complex-valued memristive neural networks with time-varying delays. Adv. Differ. Equ. 2018, 118 (2018)
Ujang, B.C., Took, C.C., Mandic, D.P.: Quaternion-valued nonlinear adaptive filtering. IEEE Trans. Neural Netw. 22(8), 1193–1206 (2011)
Zhu, J., Sun, J.: Global exponential stability of Clifford-valued recurrent neural networks. Neurocomputing 173, 685–689 (2016)
Long, Y., Zhong, Z., Guo, Y.: A novel 4-D artificial-neural-network-based hybrid large-signal model of GaAs pHEMTs. IEEE Trans. Microw. Theory Tech. 64(6), 1752–1762 (2016)
Chen, X., Song, Q.: State estimation for quaternion-valued neural networks with multiple time delays. IEEE Trans. Syst. Man Cybern. Syst. 1–10 (2017)
Xia, Y., Jahanchahi, C., Mandic, D.P.: Quaternion-valued echo state networks. IEEE Trans. Neural Netw. Learn. Syst. 26(4), 663–673 (2015)
Chen, X., Song, Q., Li, Z.: Design and analysis of quaternion-valued neural networks for associative memories. IEEE Trans. Syst. Man Cybern. Syst. 48(12), 2305–2314 (2017)
Zhang, F.: Quaternions and matrices of quaternions. Linear Algebra Appl. 251(15), 21–57 (1997)
Liu, Y., Zhang, D., Lou, J., Lu, J., Cao, J.: Stability analysis of quaternion-valued neural networks: decomposition and direct approaches. IEEE Trans. Neural Netw. Learn. Syst. 29(9), 4201–4211 (2018)
Yi, C., Lv, Y., Dang, Z., Xiao, H., Yu, X.: Quaternion singular spectrum analysis using convex optimization and its application to fault diagnosis of rolling bearing. Measurement 103, 321–332 (2017)
Arena, P., Fortuna, F., Muscato, G., Xibilia, M.G.: Multilayer perceptrons to approximate quaternion valued functions. Neural Netw. 10(2), 335–342 (1997)
Isokawa, T., Nishimura, H., Kamiura, N., Matsui, N.: Associative memory in quaternionic Hopfield neural network. Int. J. Neural Syst. 18(2), 135–145 (2008)
Senan, S.: Robustness analysis of uncertain dynamical neural networks with multiple time delays. Neural Netw. 70, 53–60 (2015)
Tan, Y., Tang, S., Chen, X.: Robust stability analysis of impulsive complex-valued neural networks with time delays and parameter uncertainties. J. Inequal. Appl. 2017, 215 (2017)
Song, Q., Yu, Q., Zhao, Z., Liu, Y., Alsaadi, F.E.: Boundedness and global robust stability analysis of delayed complex-valued neural networks with interval parameter uncertainties. Neural Netw. 103, 55–62 (2018)
Rong, L.: LMI-based criteria for robust stability of Cohen–Grossberg neural networks with delay. Phys. Lett. 339, 63–73 (2005)
Tan, Y., Tang, S., Chen, X.: Robust stability analysis of impulsive complex-valued neural networks with mixed time delays and parameter uncertainties. Adv. Differ. Equ. 2018, 62 (2018)
Song, Q.: On robust stability of linear interval systems with time-delay. Control Theory Appl. 22(1), 161–163 (2005)
Xu, S., Lam, J., Ho, D.W.C., Zou, Y.: Global robust exponential stability analysis for interval recurrent neural networks. Phys. Lett. A 325(2), 124–133 (2004)
Wang, Z., Shu, H., Liu, Y., Ho, D.W.C., Liu, X.: Robust stability analysis of generalized neural networks with discrete and distributed time delays. Chaos Solitons Fractals 30(4), 886–896 (2006)
Chen, X., Song, Q., Li, Z., Zhao, Z., Liu, Y.: Stability analysis of continuous-time and discrete-time quaternion-valued neural networks with linear threshold neurons. IEEE Trans. Neural Netw. Learn. Syst. 29(7), 2769–2781 (2017)
Hu, J., Zeng, C., Tan, J.: Boundedness and periodicity for linear threshold discrete-time quaternion-valued neural network with time-delays. Neurocomputing 267(6), 417–425 (2017)
Li, Y., Qin, J.: Existence and global exponential stability of periodic solutions for quaternion-valued cellular neural networks with time-varying delays. Neurocomputing 292, 91–103 (2018)
Zhu, J., Sun, J.: Stability of quaternion-valued impulsive delay difference systems and its application to neural networks. Neurocomputing 284(5), 63–69 (2018)
Liu, Y., Zhang, D., Lu, J.: Global exponential stability for quaternion-valued recurrent neural networks with time-varying delays. Nonlinear Dyn. 87(1), 553–565 (2016)
Liu, Y., Zhang, D., Lu, J., Cao, J.: Global μ-stability criteria for quaternion-valued neural networks with unbounded time-varying delays. Inf. Sci. 360(10), 273–288 (2016)
Li, Y.K., Qin, J.L., Li, B.: Existence and global exponential stability of anti-periodic solutions for delayed quaternion-valued cellular neural networks with impulsive effects. Math. Methods Appl. Sci. 42(1), 5–23 (2019)
Tu, Z.W., Zhao, Y.X., Ding, N., Feng, Y.M., Zhang, W.: Stability analysis of quaternion-valued neural networks with both discrete and distributed delays. Appl. Math. Comput. 343, 342–353 (2019)
Pahnehkolaei, S.M.A., Alfi, A., Machado, J.A.T.: Stability analysis of fractional Quaternion-Valued Leaky Integrator Echo State Neural Networks with multiple time-varying delays. Neurocomputing 331, 388–402 (2019)
Chen, X., Li, Z., Song, Q., Hu, J., Tan, Y.: Robust stability analysis of quaternion-valued neural networks with time delays and parameter uncertainties. Neural Netw. 91, 55–65 (2017)
Chen, X., Li, L., Li, Z.: Robust stability analysis of quaternion-valued neural networks via LMI approach. Adv. Differ. Equ. 2018, 131 (2018)
Nagamani, G., Ramasamy, S., Balasubramaniam, P.: Robust dissipativity and passivity analysis for discrete-time stochastic neural networks with time-varying delay. Complexity 21(3), 47–58 (2016)
Liu, Y., Wang, Z., Liang, J., Liu, X.: Stability and synchronization of discrete-time Markovian jumping neural networks with mixed mode-dependent time delays. IEEE Trans. Neural Netw. 20(7), 1102–1116 (2009)
Funding
This work was supported by the National Natural Science Foundation of China under Grants (11801047), the Program of Chongqing Innovation Team Project in University under Grant (CXTDX201601022) and the Natural Science Foundation of Chongqing under Grant (cstc2018jcyjAX0606).
Author information
Authors and Affiliations
Contributions
All authors conceived of the study, participated in its design and coordination, and read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no conflict of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Wang, X., Zhou, J., Chen, X. et al. Parameter-range-dependent robust stability conditions for quaternion-valued neural networks with time delays. Adv Differ Equ 2019, 181 (2019). https://doi.org/10.1186/s13662-019-2046-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-019-2046-z