
Abstract
This paper focuses on the state estimation problem for complex-valued memristive neural networks with time-varying delays. By utilizing Lyapunov stability theory and some matrix inequality techniques, based on a novel Lyapunov functional, a sufficient delay-dependent condition which guarantees that the error-state system is global asymptotically stable is firstly derived for the addressed system, and a suitable state estimator is also designed. Finally, an example is given to illustrate the present method.
Similar content being viewed by others

1 Introduction
During the past decades, a neural networks model has been studied intensively. Broad applications have been explored in various areas ranging from signal processing, parallel computation and engineering optimization to pattern recognition, which rely heavily on the dynamical behaviors of this kind of model. As a result, many researchers have been attracted to study it and lots of achievements on various dynamical behaviors have arisen [1–3]. A weighting delay and space partitioning method was proposed in [1, 2], and the stability criterion was established by establishing the relation among the connection parameters, delay parameters and dynamic variables of systems, which are less conservative than previous results. Moreover, as everyone knows, when studying the dynamical behaviors of this model, obtaining the state information for the networks is usually very important. Unfortunately, in practice, it is difficult to obtain the exact and complete information of neural states in the network outputs because of many reasons. Thus, in order to fully exploit the neural networks, it becomes significant and essential to use a reasonable measurement to estimate the neuron state. Accordingly, many fruitful achievements on state estimation problems for neural networks have been reported [4–17].
In the early 1970s, Chua [18] presented theoretically the existence of a new basic electrical circuit element, named the memristor, which describes the relationship between electric charge and flux linkage. A practical memristor device has been realized practically by the research team of HP Lab in 2008. As a new two-terminal passive device which follows resistor, inductor and capacitor, the memristor shares many properties of resistor and the same unit of measurement. Moreover, it is also shown to be similar to the synapses in the human brain. Based on these features, the memristive neural networks model established by replacing a resistor with a memristor has attracted more and more attention, and various dynamical behaviors of this model have been investigated, see [19–27] and the references therein. However, when it comes to the state estimation problem, only [28, 29] studied the related content. For instance, the \(H_{\infty}\) state estimation problem of discrete-time memristive neural networks is studied in [29]. Here, the discrete-time memristive neural networks are recast into a tractable model by defining a series of state-dependent switched signals and the calculation cost is reduced effectively when dealing with the connection weights by a robust analysis method.
On the other hand, the dynamical behavior analysis of the complex-valued neural networks model has undergone a research upsurge, due to the more extensive applications, including radar imaging, electromagnetic waves, remote sensing, quantum devices, and so on [30]. As an extension of the real-valued neural networks, the complex-valued system with complex-valued states, activation functions and connection weights possesses more complicated and abundant properties than real-valued one. Moreover, they can be used to solve many complicated real-life problems that the real-valued model cannot do, such as the speed and direction in wind profile model [31]. So far, effective achievements on the dynamical behaviors of complex-valued neural networks have emerged in large numbers [32–39]. Moreover, for memristor-based complex-valued neural networks, abundant relevant results have also been achieved [40–46]. However, there are only a few results focusing on the state estimation problem for complex-valued networks [47–49]. Moreover, there is still no information published about the state estimation problem for memristor-based complex-valued neural networks. This situation prompts our current research.
Considering the inevitability of time delay in many practical projects [50–57] and motivated by the above discussions, the state estimation problem for complex-valued memristive neural networks with time-varying delays is investigated in this paper. The contribution of this paper is mainly embodied in the following respects: (1) The state estimation of complex-valued memristive neural networks with time-varying delays is studied for the first time. (2) Based on the Lyapunov stability theory, differential inclusion theory and some matrix inequality techniques, and by constructing a novel Lyapunov functional, a sufficient delay-dependent condition is proposed, under which the error system is globally asymptotically stable. On the other hand, the LMI-based results consider the sign difference of the memristive weights. (3) By solving certain matrix inequalities, the state estimator gain matrix can be determined easily by solving certain matrix inequalities.
2 Preliminaries and problem description
Consider the memristor-based complex-valued neural networks and the network measurements equation described as follows:
or equivalently
where \(D=\operatorname{diag}\{d_{1},d_{2},\ldots,d_{n}\}\in\mathbf{R}^{n\times n}\) with \(d_{p}>0\) (\(p=1,2,\ldots,n\)) is the self-feedback connection weight matrix, \(z(t)=(z_{1}(t), z_{2}(t),\ldots,z_{n}(t))^{T}\in\mathbf{C}^{n}\) is the neuron state vector, \(l(t)=(l_{1}(t), l_{2}(t),\ldots,l_{m}(t))^{T}\in\mathbf{C}^{m}\) is the measurement output of the networks, \(C=(c_{qk})_{m\times n}\in\mathbf{C}^{m\times n}\) is for the output weights, \(f(z(t))=(f_{1}(z_{1}(t)),f_{2}(z_{2}(t)), \ldots,f_{n}(z_{n}(t)))^{T}\in\mathbf {C}^{n}\) and \(f(z(t-\tau(t)))=(f_{1}(z_{1}(t-\tau(t))),f_{2}(z_{2}(t-\tau (t))),\ldots,f_{n}(z_{n}(t-\tau(t))))^{T}\in\mathbf{C}^{n}\) are the vector-valued activation functions without and with time delays, \(g(t,z(t)): \mathbf{R^{+}}\times\mathbf{C}^{n}\rightarrow\mathbf {C}^{m}\) denotes the neuron-dependent nonlinear disturbances on the network outputs. \(\tau(t)\) is the time-varying delay and satisfies \(\tau _{1}\leq\tau(t)\leq\tau_{2}\) and \(\dot{\tau}(t)\leq\rho\), where \(\tau _{1}\), \(\tau_{2}\), ρ are scalar constants, \(A(z(t))=(a_{pk}(z_{k}(t)))_{n\times n}\in\mathbf{C}^{n\times n}\) and \(B(z(t))=(b_{pk}(z_{k}(t)))_{n\times n}\in\mathbf{C}^{n\times n}\) are the connection memristive weight matrices, and they are defined as follows:
where \(a_{pk}^{R}(z_{k}(t))=\operatorname{Re}(a_{pk}(z_{k}(t)))\), \(a_{pk}^{I}(z_{k}(t))=\operatorname{Im}(a_{pk}(z_{k}(t)))\), \(b_{pk}^{R}(z_{k}(t))=\operatorname{Re}(b_{pk}(z_{k}(t)))\), \(b_{pk}^{I}(z_{k}(t))=\operatorname{Im}(b_{pk}(z_{k}(t)))\), the switching jumps \(\delta_{k}>0\), and \(a_{pk}^{\prime}\), \(a_{pk}^{\prime\prime}\), \(b_{pk}^{\prime}\), \(b_{pk}^{\prime\prime}\), \(a_{pk}^{R^{\prime}}\), \(a_{pk}^{R^{\prime\prime}}\), \(b_{pk}^{R^{\prime }}\), \(b_{pk}^{R^{\prime\prime}}\), \(a_{pk}^{I^{\prime}}\), \(a_{pk}^{I^{\prime\prime}}\), \(b_{pk}^{I^{\prime}}\), \(b_{pk}^{I^{\prime \prime}}\) are constants.
By applying the differential inclusion feature and the theory of set-valued maps, the memristor-based complex-valued system (1) can be rewritten as
or in the compact form given by
where \(A^{\prime}=(a_{pk}^{\prime})_{n\times n}\), \(A^{\prime\prime }=(a_{pk}^{\prime\prime})_{n\times n}\), \(B^{\prime}=(b_{pk}^{\prime})_{n\times n}\), \(B^{\prime\prime}=(b_{pk}^{\prime\prime})_{n\times n}\); or equivalently, there exist measurable function matrices \(\bar{A}(t)\in \operatorname{co}\{A^{\prime},A^{\prime\prime}\}\) and \(\bar{B}(t)\in \operatorname{co}\{B^{\prime},B^{\prime\prime}\}\), such that
For system (2), we construct the full-order state estimator as follows:
where \(\hat{z}=(\hat{z}_{1}, \hat{z}_{2},\ldots,\hat{z}_{n})^{T}\in\mathbf {C}^{n}\) is the estimation of the neuron state, and \(K\in\mathbf {C}^{n\times m}\) is the estimator gain matrix to be designed.
Let \(e(t)=z(t)-\hat{z}(t)\), \(f(e(t))=f(z(t))-f(\hat{z}(t))\), \(f(e(t-\tau (t)))=f(z(t-\tau(t)))-f(\hat{z}(t-\tau(t)))\), \(g(e(t))=g(t,z(t))-g(t,\hat{z}(t))\), then the error-state system is given by
In the following, some assumptions and basic lemmas are given, which will be used in establishing the main results.
Assumption 1
For any \(z_{1}, z_{2}\in\mathbf{C}\), the neuron activation functions \(f_{k}(\cdot)\) satisfy the following Lipschitz conditions:
where \(l_{k}>0\) (\(k=1,2,\ldots,n\)) are constants, let \(L=\operatorname {diag}\{l_{1},l_{2},\ldots,l_{n}\}\).
Assumption 2
For any \(z, z^{\prime}\in\mathbf{C}^{n}\), there exists a real matrix M such that the neuron-dependent nonlinear disturbances satisfy the following inequality:
Lemma 1
([47])
For any constant Hermitian matrix \(M \in\mathbf{C}^{n\times n}\) and \(M>0\), a vector function \(\Phi (s):[p,q]\rightarrow\mathbf{C}^{n}\) with scalars \(p< q\) such that the integrations concerned are well defined, then
Lemma 2
Given a Hermitian matrix Ω, let \(\Omega^{R}=\operatorname {Re}(\Omega)\), \(\Omega^{I}=\operatorname{Im}(\Omega)\), then \(\Omega< 0\) if and only if
3 Main results
In this section, an effective state estimator for system (1) or (2) will be designed, and a sufficient condition will be developed to guarantee the global asymptotical stability of the error-state system. First, for convenience, we denote \(z(t)\), \(\hat{z}(t)\), \(z(t-\tau(t))\), \(\hat{z}(t-\tau(t))\), \(e(t-\tau(t))\), \(e(t-\tau_{1})\) and \(e(t-\tau _{2})\) as z, ẑ, \(z^{\tau}\), \(\hat{z}^{\tau}\), \(e^{\tau}\), \(e^{\tau_{1}}\) and \(e^{\tau_{2}}\), respectively.
Theorem 1
Suppose that Assumption 1 holds; the error-state system (8) is globally asymptotically stable, if there exist positive definite Hermitian matrices P, \(W_{1}\), \(W_{2}\), \(Q_{1}\), \(Q_{2}\), \(R_{1}\), \(R_{2}\), any complex matrix R, and positive scalars \(\epsilon_{\kappa}\) (\(\kappa =1,2,\ldots,5\)) such that the following matrix inequalities hold:
where
Moreover, the estimator gain matrix is given by \(K=P^{-1}R\).
Proof
Consider the candidate Lyapunov functional
By the feature of memristors described in (3), the following four cases may exist.
Case 1: When \(|z_{k}(t)|<\delta_{k}\), \(|\hat{z}_{k}(t)|<\delta_{k}\), at time t, systems (6) and (7) can turn into the following systems, respectively:
and
Then the error-state system can be obtained:
Based on Lemma 1 and along the trajectories of systems (14) and (15), the derivative of \(V(t)\) can be estimated as
Moreover, from (10), it is clear that
for \(\epsilon_{\varrho}>0\), \(\varrho=1,2,\ldots,5\), where \(\bar {L}=L^{T}L\), \(\bar{M}=M^{T}M\). Then, combining (16) with (17), we have
Case 2: When \(|z_{k}(t)|>\delta_{k}\), \(|\hat{z}_{k}(t)|>\delta_{k}\), at time t, systems (6) and (7) can turn into the following systems, respectively:
and
Then the error-state system can be obtained:
By a similar derivation process to Case 1, one has
Case 3: When \(|z_{k}(t)|<\delta_{k}\), \(|\hat{z}_{k}(t)|>\delta_{k}\), at time t, systems (6)and (7) can turn into (14) and (21), then the error-state system can be written as
By a similar derivation process to Case 1, we find that
Case 4: When \(|z_{k}(t)|>\delta_{k}\), \(|\hat{z}_{k}(t)|<\delta_{k}\), at time t, systems (6) and (7) can turn into (20) and (15), then the error-state system can be written as
By a similar derivation process to Case 1, one has
Moreover, by the Schur complement, (11) is equivalent to \(\Omega^{j}+\tau_{1}^{2}S_{j}R_{1}S_{j}^{\ast}+\tau _{12}^{2}S_{j}R_{2}S_{j}^{\ast}<0\). Then there must be a small positive scalar ε such that \((\Omega^{j}+\tau_{1}^{2}S_{j}^{\ast}R_{1}S_{j}+\tau_{12}^{2}S_{j}^{\ast }R_{2}S_{j})+ \operatorname{diag}(\varepsilon I,0,0,0,0,0,0, 0,0,0,0)\leq0\), then we have \(\dot{V}(t)\leq-\varepsilon\| e(t)\|^{2}<0\), which implies that the error-state system (8) is globally asymptotically stable. □
Corollary 1
Suppose that Assumption 1 holds, the error-state system (8) is globally asymptotically stable, if there exist positive definite Hermitian matrices \(P=P_{1}+iP_{2}\), \(W_{1}=W_{11}+iW_{12}\), \(W_{2}=W_{21}+iW_{22}\), \(Q_{1}=Q_{11}+iQ_{12}\), \(Q_{2}=Q_{21}+iQ_{22}\), \(R_{1}=R_{11}+iR_{12}\), \(R_{2}=R_{21}+iR_{22}\), any complex matrix \(R=R^{1}+iR^{2}\), and positive scalars \(\epsilon_{\kappa}\) (\(\kappa =1,2,\ldots,5\)), such that the following LMIs hold:
where
Proof
We multiply (11) from the left and right by \(\operatorname {diag}(I, (R_{1}^{-1}P)^{\ast}, (R_{2}^{-1}P)^{\ast})\) and its transpose \(\operatorname{diag}(I,R_{1}^{-1}P, R_{2}^{-1}P)\). Further, noting that \(P^{\ast}R_{1}^{-1}P\geq2P-R_{1}\) and \(P^{\ast }R_{2}^{-1}P\geq2P-R_{2}\), one easily derives that
By means of Lemma 2, complex-valued LMIs (28) can be transformed into real-valued ones described in (27). Obviously, (27) can guarantee that (11) holds. The proof is completed. □
Remark 1
Up to now, unlike the abundant research results about the state estimation problem for the real-valued neural networks [4–12, 14–17], there have been few relevant results for the complex-valued neural networks [47–49]. Further, for real-valued memristive neural networks, only [28, 29] touches on the same problem. Moreover, when it comes to complex-valued memristive systems, there is no achievement established on the state estimation problem. In this paper, a sufficient condition is proposed to devise the desired state estimator based on the Lyapunov functional method and the linear matrix inequality techniques. Thus, our work can fill in this gap.
Remark 2
Considering the special structure of complex-valued neural networks with memristors, the improved Lyapunov functional on those in [4–12, 14–17, 28, 29, 47–49] is constructed. Then a LMI-based result with lower computational burden is obtained, which considers the sign difference of the memristive weights and overcomes the shortcomings of the results based on M-matrix and algebraic inequality. The gain matrix K can be determined easily by solving the certain matrix inequalities (27). Besides, if system (1) is reduced to real-valued memristive neural networks, a similar result can also be derived.
Remark 3
Stability analysis is the basis of the design of state estimator, and many effective methods have been proposed. In [2], a weighting-delay-based method is developed by dividing the delay interval \([0,d(t)]\) into some variable subintervals by employing weighting delays, and less conservative criteria are obtained. Meanwhile, the adjustable parameters will be increased accordingly along with the increase of the subinterval. Noted that the results in this paper are very different from those in [1, 2]. The main reason lies in that the core idea in this paper is to design an effective state estimator for system (1), which belongs to the state-dependent switched systems. The parameters of such systems are uncertain. To design an effective state estimator, the improved Lyapunov functional containing the time-varying delays and the estimated states is constructed. Considering the weighting-delay-based method in [2] has inherent flexibility in dealing with the time-varying delay; it is a meaningful topic to apply the novel method to the state estimation issue and we will regard it as our target for further research.
4 Simulation example
In this section, an example is given to illustrate the effectiveness of our proposed results for the state estimator design of complex-valued memristive neural networks with time-varying delays.
Example 1
Consider system (1) with the following parameters:
For this system, the activation functions and the nonlinear disturbance are taken as \(f(z)= \frac{1-e^{-\operatorname{Re}(z)}}{1+e^{-\operatorname{Re}(z)}}+i\frac {1}{1+e^{-\operatorname{Im}(z)}}\), \(g(z)=0.1\operatorname {cos}(\operatorname{Re}(z))+0.1i\operatorname{sin}(\operatorname {Im}(z))\), respectively. The time-varying delay is given as \(\tau(t)=0.4|\operatorname{cos}(t)|\) with \(\tau_{1}=0\), \(\tau_{2}=0.4\).
From the above parameters, we obtain
By employing the Matlab LMI Toolbox, the feasible solutions to the LMIs (27) are
Hence, we have
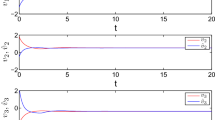
Moreover, it can be obtained from Corollary 1 that system (1) with the estimator gain K obtained is globally asymptotically stable. The simulation results are shown in Figs. 1, 2, 3.

The responses of state \(\operatorname{Re}(z_{1}(t))\), \(\operatorname{Re}(z_{2}(t))\) and its estimation

The responses of state \(\operatorname{Im}(z_{1}(t))\), \(\operatorname{Im}(z_{2}(t))\) and its estimation

Trajectories of the error states \(e_{1}(t)\)
5 Conclusion
In this paper, the state estimation problem of complex-valued memristive neural networks with time-varying delays has been investigated for the first time. Based on Lyapunov stability theory and the matrix inequality techniques, a sufficient delay-dependent condition has been obtained to ensure the existence of the desired state estimator for the system addressed. In the end, an example has been given to illustrate the effectiveness of our results.
References
Zhang, H., Wang, Z., Liu, D.: Global asymptotic stability of recurrent neural networks with multiple time-varying delays. IEEE Trans. Neural Netw. 19, 855–873 (2008)
Zhang, H., Liu, Z., Huang, G., Wang, Z.: Novel weighting-delay-based stability criteria for recurrent neural networks with time-varying delay. IEEE Trans. Neural Netw. 21, 91–106 (2010)
Wang, Z., Ding, S., Shan, Q., Zhang, H.: Stability of recurrent neural networks with time-varying delay via flexible terminal method. IEEE Trans. Neural Netw. Learn. Syst. 28, 2456–2463 (2017)
Wang, Z., Ho, D.W.C., Liu, X.: State estimation for delayed neural networks. IEEE Trans. Neural Netw. 16, 279–284 (2005)
He, Y., Wang, Q., Wu, M., Lin, C.: Delay-dependent state estimation for delayed neural networks. IEEE Trans. Neural Netw. 17, 1077–1081 (2006)
Zhang, Z., Shao, H., Wang, Z., Shen, H.: Reduced-order observer design for the synchronization of the generalized Lorenz chaotic systems. Appl. Math. Comput. 218, 7614–7621 (2012)
Shi, K., Liu, X., Tang, Y., Zhu, H., Zhong, S.: Some novel approaches on state estimation of delayed neural networks. Inf. Sci. 372, 313–331 (2016)
Zhao, Y., Zhang, W.: Observer-based controller design for singular stochastic Markov jump systems with state dependent noise. J. Syst. Sci. Complex. 29(4), 946–958 (2016)
Wang, H., Song, Q.: State estimation for neural networks with mixed interval time-varying delays. Neurocomputing 73, 1281–1288 (2010)
Li, T., Fei, S., Zhu, Q.: Design of exponential state estimator for neural networks with distributed delays. Nonlinear Anal., Real World Appl. 10, 1229–1242 (2009)
Lv, W., Wang, F.: Adaptive tracking control for a class of uncertain nonlinear systems with infinite number of actuator failures using neural networks. Adv. Differ. Equ. 2017, Article ID 374 (2017).
Yan, Z., Zhang, G., Wang, J., Zhang, W.: State and output feedback finite-time guaranteed cost control of linear Itô stochastic systems. J. Syst. Sci. Complex. 28(4), 813–829 (2015)
Zhang, Z., Liu, X., Liu, Y., Lin, C., Chen, B.: Fixed-time almost disturbance decoupling of nonlinear time-varying systems with multiple disturbances and dead-zone input. Inf. Sci. (2018). https://doi.org/10.1016/j.ins.2018.03.044
Wang, Z., Wang, J., Wu, Y.: State estimation for recurrent neural networks with unknown delays: a robust analysis approach. Neurocomputing 227, 29–36 (2017)
Lin, X., Zhang, R.: \(H_{\infty}\) control for stochastic systems with Poisson jumps. J. Syst. Sci. Complex. 24(4), 683–700 (2011)
Meng, X.: Stability of a novel stochastic epidemic model with double epidemic hypothesis. Appl. Math. Comput. 217(2), 506–515 (2010)
Huang, H., Huang, T., Chen, X.: Further result on guaranteed \(H_{\infty}\) performance state estimation of delayed static neural networks. IEEE Trans. Neural Netw. Learn. Syst. 26, 1335–1341 (2015)
Chua, L.O.: Memristor—the missing circuit element. IEEE Trans. Circuit Theory 18, 507–519 (1971)
Wu, A., Zeng, Z.: Dynamic behaviors of memristor-based recurrent neural networks with time-varying delays. Neural Netw. 36, 1–10 (2012)
Li, Y., Huang, X., Song, Y., Lin, J.: A new fourth-order memristive chaotic system and its generation. Int. J. Bifurc. Chaos 25(11), 1550151 (2015)
Rajivganthi, C., Rihan, F.A., Lakshmanan, S., Rakkiyappan, R., Muthukumar, P.: Synchronization of memristor-based delayed BAM neural networks with fractional-order derivatives. Complexity 21, 412–426 (2016)
Zhang, S., Meng, X., Zhang, T.: Dynamics analysis and numerical simulations of a stochastic non-autonomous predator–prey system with impulsive effects. Nonlinear Anal. Hybrid Syst. 26, 19–37 (2017)
Ma, H., Jia, Y.: Stability analysis for stochastic differential equations with infinite Markovian switchings. J. Math. Anal. Appl. 43(1), 593–605 (2016)
Guo, Z., Wang, J., Yan, Z.: Global exponential dissipativity and stabilization of memristor-based recurrent neural networks with time-varying delays. Neural Netw. 48, 158–172 (2013)
Liu, J., Xu, R.: Delay-dependent passivity and stability analysis for a class of memristor-based neural networks with time delay in the leakage term. Neural Process. Lett. 46, 467–485 (2017).
Ding, S., Wang, Z., Huang, Z., Zhang, H.: Novel switching jumps dependent exponential synchronization criteria for memristor-based neural networks. Neural Process. Lett. 45, 15–28 (2017)
Ding, S., Wang, Z.: Lag quasi-synchronization for memristive neural networks with switching jumps mismatch. Neural Comput. Appl. 8, 4011–4022 (2017)
Wei, H., Li, R., Chen, C.: State estimation for memristor-based neural networks with time-varying delays. Int. J. Mach. Learn. Cybern. 6, 213–225 (2015)
Ding, S., Wang, Z., Wang, J., Zhang, H.: \(H_{\infty}\) state estimation for memristive neural networks with time-varying delays: the discrete-time case. Neural Netw. 84, 47–56 (2016)
Hirose, A.: Complex-Valued Neural Networks: Theories and Applications. World Scientific, Singapore (2003)
Goh, S.L., Chen, M., Popovic, D.H., Aihara, K., Obradovic, D., Mandic, D.P.: Complex-valued forecasting of wind profile. Renew. Energy 31, 1733–1750 (2006)
Hu, J., Wang, J.: Global stability of complex-valued recurrent neural networks with time-delays. IEEE Trans. Neural Netw. Learn. Syst. 23, 853–865 (2012)
Liu, X., Li, Y., Zhang, W.: Stochastic linear quadratic optimal control with constraint for discrete-time systems. Appl. Math. Comput. 228, 264–270 (2014)
Pan, J., Liu, X., Xie, W.: Exponential stability of a class of complex-valued neural networks with time-varying delays. Neurocomputing 164, 293–299 (2015)
Zhang, Q., Zhang, W.: Properties of storage functions and applications to nonlinear stochastic \(H_{\infty}\) control. J. Syst. Sci. Complex. 24(5), 850–861 (2011)
Zhang, Z., Lin, C., Chen, B.: Global stability criterion for delayed complex-valued recurrent neural networks. IEEE Trans. Neural Netw. Learn. Syst. 25, 1704–1708 (2014)
Zhang, Z., Liu, X., Chen, J., Guo, R., Zhou, S.: Further stability analysis for delayed complex-valued recurrent neural networks. Neurocomputing 251, 81–89 (2017)
Xu, D., Tan, M.: Delay-independent stability criteria for complex-valued BAM neutral-type neural networks with time delays. Nonlinear Dyn. 89, 819–832 (2017)
Velmurugan, G., Rakkiyappan, R., Vembarasan, V., Cao, J., Alsaedi, A.: Dissipativity and stability analysis of fractional-order complex-valued neural networks with time delay. Neural Netw. 86, 42–53 (2017)
Li, X., Rakkiyappan, R., Velmurugan, G.: Dissipativity analysis of memristor-based complex-valued neural networks with time-varying delays. Inf. Sci. 294, 645–665 (2015)
Meng, X., Zhao, S., Zhang, W.: Adaptive dynamics analysis of a predator–prey model with selective disturbance. Appl. Math. Comput. 266, 946–958 (2015)
Guo, R., Zhang, Z., Liu, X., Lin, C., Wang, H., Chen, J.: Exponential input-to-state stability for complex-valued memristor-based BAM neural networks with multiple time-varying delays. Neurocomputing 275, 2041–2054 (2018).
Meng, X., Liu, R., Zhang, T.: Adaptive dynamics for a non-autonomous Lotka–Volterra model with size-selective disturbance. Nonlinear Anal., Real World Appl. 16, 202–213 (2014)
Wang, H., Duan, S., Huang, T., Wang, L., Li, C.: Exponential stability of complex-valued memristive recurrent neural networks. IEEE Trans. Neural Netw. Learn. Syst. 28, 766–771 (2017)
Zhang, Z., Liu, X., Zhou, D., Lin, C., Chen, J., Wang, H.: Finite-time stabilizability and instabilizability for complex-valued memristive neural networks with time delays. IEEE Trans. Syst. Man Cybern. Syst. (2018). https://doi.org/10.1109/TSMC.2017.2754508
Guo, R., Zhang, Z., Liu, X., Lin, C.: Existence, uniqueness, and exponential stability analysis for complex-valued memristor-based BAM neural networks with time delays. Appl. Math. Comput. 311, 100–117 (2017)
Qiu, B., Liao, X., Zhou, B.: State estimation for complex-valued neural networks with time-varying delays. In: Proceedings of Sixth International Conference on Intelligent Control and Information Processing, pp. 531–536 (2015)
Gong, W., Liang, J., Kan, X., Nie, X.: Robust state estimation for delayed complex-valued neural networks. Neural Process. Lett. 46, 1009–1029 (2017). https://doi.org/10.1007/s11063-017-9626-2
Gong, W., Liang, J., Kan, X., Wang, L., Dobaie, A.M.: Robust state estimation for stochastic complex-valued neural networks with sampled-data. Neural Comput. Appl. (2018). https://doi.org/10.1007/s00521-017-3030-8
Zhang, T., Meng, X., Zhang, T., Song, Y.: Global dynamics for a new high-dimensional sir model with distributed delay. Appl. Math. Comput. 218, 11806–11819 (2012)
Zhang, T., Ma, W., Meng, X.: Global dynamics of a delayed chemostat model with harvest by impulsive flocculant input. Adv. Differ. Equ. 2017, Article ID 115 (2017)
Liu, L., Meng, X.: Optimal harvesting control and dynamics of two-species stochastic model with delays. Adv. Differ. Equ. 2017, Article ID 18 (2017)
Meng, X., Gao, Q., Li, Z.: The effects of delayed growth response on the dynamic behaviors of the Monod type chemostat model with impulsive input nutrient concentration. Nonlinear Anal., Real World Appl. 11, 4476–4486 (2010)
Meng, X., Chen, L., Wang, X.: Some new results for a logistic almost periodic system with infinite delay and discrete delay. Nonlinear Anal., Real World Appl. 10(3), 1255–1264 (2009)
Wang, Z., Huang, X., Shi, G.: Analysis of nonlinear dynamics and chaos in a fractional order financial system with time delay. Comput. Math. Appl. 62, 1531–1539 (2011)
Gao, M., Sheng, L., Zhang, W.: Stochastic \(H_{2}/H_{\infty}\) control of nonlinear systems with time-delay and state-dependent noise. Appl. Math. Comput. 266, 429–440 (2015)
Meng, X., Chen, L., Wu, B.: A delay sir epidemic model with pulse vaccination and incubation times. Nonlinear Anal., Real World Appl. 11(1), 88–98 (2010)
Acknowledgements
The authors are thankful to the referees for their valuable comments and constructive suggestions towards the improvement of the paper. This work was supported in part by the National Natural Science Foundation of China (61503222, 61673227, 61573008, 61773245), in part by the Research Fund for the Taishan Scholar Project of Shandong Province of China, in part by the Project funded by Chinese Postdoctoral Science Foundation (2016M602166), in part by the Fund for Postdoctoral Applied Research Projects of Qingdao (2016116), and in part by SDUST Innovation Fund for Graduate Students (SDKDYC180225).
Author information
Authors and Affiliations
Contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Guo, R., Zhang, Z. & Gao, M. State estimation for complex-valued memristive neural networks with time-varying delays. Adv Differ Equ 2018, 118 (2018). https://doi.org/10.1186/s13662-018-1575-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1575-1