
Abstract
In this paper, we study the Hopf-zero bifurcation of Oregonator oscillator with delay. The interaction coefficient and time delay are taken as two bifurcation parameters. Firstly, we get the normal form by performing a center manifold reduction and using the normal form theory developed by Faria and Magalhães. Secondly, we obtain a critical value to predict the bifurcation diagrams and phase portraits. Under some conditions, saddle-node bifurcation and pitchfork bifurcation occur along M and N, respectively; Hopf bifurcation and heteroclinic bifurcation occur along H and S, respectively. Finally, we use numerical simulations to support theoretical analysis.
Similar content being viewed by others
1 Introduction
An oscillatory chemical reaction refers to the reaction system of certain antileather concentration showing relatively stable cyclical changes. In 1921, Bray achieved a liquid oscillatory reaction in the experiment. In 1964, Zhabotinsky reported some other oscillatory reactions of this nature [14, 15, 21]. Until the 1970s, Field, Koros, and Noyes proposed the Oregonator model based on an in-depth study of the BZ reaction. According to Field and Noyes, the BZ reaction is simplified. In 1979, Tyson assumed that the concentration of the reactants \(A=[\mathrm {BrO}_{3}^{-}]\) and \(B=[\mathrm{BrCH(COOH)}_{2}]\) is independent of time. Therefore we can give the following reactant concentration equation:
where \(P=[\mathrm{HBrO}_{2}]\), \(Q=[\mathrm{Br}]\), \(W=[\mathrm {Ce(IV)}]\). We will make the following changes in this system:
where
So we can obtain another form of the Oregonator oscillator, the so-called Tyson-type oscillator:
where
Because δ is much smaller than ε, the second formula in the system can be approximated as
This yields a simplified two-dimensional Oregonator model [27] with respect to x and z:
where \(x=[\mathrm{HBrO}_{2}]\), \(z=\mathrm{Ce(IV)}\).
When electric current is applied, the catalyst Ce(IV) is perturbed, and other species are not affected (see [15]). Since the perturbation term is introduced in the equation \(\frac{dz}{dt}=x-z\), we rewrite this equation in the following form:
We consider the Oregonator model with delay:
where \(\varepsilon=4\times10^{-2}\), \(\delta=4\times10^{-4}\), \(q=8\times 10^{-4}\), and \(h_{1}\in(0,1)\) is an adjustable parameter.
Nowadays, many scholars study the Hopf bifurcation or Hopf-zero bifurcation in delay differential equations, and some results have been obtained (see [1, 2, 4, 5, 7,8,9,10, 12, 13, 17, 19, 22, 24, 26,27,28,29]). However, to the best of our knowledge, there are no studies on the Hopf-zero bifurcation of Oregonator oscillator with time delay. Therefore, it is the far-reaching significance to research the Hopf-zero bifurcation of Oregonator model.
The remainder of the paper is organized as follows. In Sect. 2, we provide stability and conditions of existence of the Hopf-zero bifurcation by taking the interaction coefficient and delay as two parameters. In Sect. 3, we use the center manifold theory and normal form method [6, 23] to investigate the Hopf-zero bifurcation with original parameters. In Sect. 4, we give several numerical simulations to support the analytic results. Finally, we draw the conclusion in Sect. 5.
2 Stability and existence of Hopf-zero bifurcation
Let \((x,z)\) be an equilibrium point of system (1.2). Obviously,
Then we have
There are three roots \(x=0\), \(x=x_{+}\), and \(x=x_{-}\) of Eq. (2.1), where
Therefore we obtain that system (1.2) has three steady-state solutions, \((x_{-},z_{-})\), \((0,0)\), and \((x_{+},z_{+})\).
Obviously, there is a unique positive steady state.
Theorem 2.1
For any \(\varepsilon>0\), \(q>0\), and \(h_{1}>0\), \((x_{+},z_{+})\) is the unique positive steady state of system (1.2).
Proof
Let \(H(x)=x(1-x)-\frac{h_{1}}{1-k}x\frac{x-q}{x+q}\). From (2.1) and (2.2) we get that only \(x_{+}\) satisfies \(H(x)=0\), \(H(x)>0\) for \(0< x< x_{+}\), and \(H(x)<0\) for \(x>x_{+}\). Furthermore, we have \(H(x_{+})=0\) and \(H'(x_{+})<0\). □
We further mainly study the dynamics of the equilibrium point \((x_{+},z_{+})\). If the characteristic equation of system (1.2) has a simple pair of purely imaginary eigenvalues \(\pm{i\omega}\), a simple root 0, and all other roots of the characteristic equation have negative real parts, then the Hopf-zero bifurcation will occur. Let \(x=x-x_{+}\) and \(z=z-z_{+}\). Then we can vary (1.2) as the following equivalent system:
The linearization equation of system (2.3) at \((0,0)\) is
where \(a_{1}=\frac{1}{\varepsilon}(\frac {-2qh_{1}z_{+}}{(q+x_{+})^{2}}+1-2x_{+})\) and \(a_{2}=\frac {1}{\varepsilon}\frac{qh_{1}-h_{1}x_{+}}{q+x_{+}}\). The characteristic equation of system (2.4) is
where \(b_{1}=a_{1}-1\) and \(b_{2}=a_{1}+a_{2}\).
If \(\lambda=0\) is the root of Eq. (2.5), then \(ka_{1}-b_{2}=0\). If \(\tau=0\), then system (2.5) becomes
Therefore we obtain that if \(\tau=0\) and \(b_{1}+k<0\), then excluding a single zero eigenvalue, all the roots of Eq. (2.5) have negative real parts.
Next, we consider the case of \(\tau\neq0\). Let iω with \(\omega >0\) be a root of \(\lambda^{2}-b_{1}\lambda-b_{2}-k\lambda{e}^{-\lambda \tau}+ka_{1}e^{-\lambda\tau}=0\). Then
Separating the real and imaginary parts, we get
It follows that ω satisfies
Suppose \(m_{1}=\omega^{2}\) and denote \(u_{1}=2b_{2}+b_{1}^{2}-k^{2}\), \(r_{1}=b_{2}^{2}-k^{2}a_{1}^{2}\). Then Eq. (2.7) becomes
Following [27], we consider the following cases:
- (B1):
-
\(r_{1}<0\).
Then we find that system (2.5) has a unique positive root \(m_{1}=\frac {-u_{1}+\sqrt{u_{1}^{2}-4r_{1}}}{2}\).
- (B2):
-
\(r_{1}>0\), \(u_{1}>0\).
Then system (2.5) has no positive root.
- (B3):
-
\(r_{1}>0\), \(u_{1}<0\).
In this case, if system (2.5) has real positive roots, then \(|k|\) is very large, and h is infinitely close to one, which is a contradiction.
Theorem 2.2
For the quadratic Eq. (2.8), we have:
-
(i)
if \(r_{1}<0\), then Eq. (2.5) has a unique positive root \(m_{1}=\frac{-u_{1}+\sqrt{u_{1}^{2}-4r_{1}}}{2}\).
-
(ii)
if \(r_{1}>0\), then Eq. (2.5) has no positive root.
Suppose that Eq. (2.8) has positive roots. Without loss of generality, we assume that it has a positive root defined by m. Then Eq. (2.7) has a positive root ω, and ω must satisfy the equation
According to system (2.6), we obtain
Denote
where \(\beta_{1}=\frac{\omega^{2}+a_{1}b_{2}}{k(\omega ^{2}+a_{1}^{2})}\), \(\alpha_{1}=-\frac{\omega^{3}+\omega (a_{1}^{2}+a_{2})}{k(\omega^{2}+a_{1}^{2})}\), \(j=0,1,2,\dots\). Then system (2.5) has a pair of purely imaginary roots \(\pm{i}\omega\) with \(\tau=\tau_{j}\), and \(\tau=\tau_{j}, j=0,1,2,\ldots\) , satisfy the equation \(\sin(\omega\tau)>0\).
We get \(k<0\) when \((B1)\) holds, and then
We obtain the transversality conditions as follows.
Theorem 2.3
If \(r<0\), then \(\frac{d\operatorname{Re}\{\lambda(\tau_{j})\}}{d\tau}\neq0\).
Proof
Substituting \(\lambda(\tau)\), \(\tau=\tau_{j}\), into Eq. (2.5), we get
So
Consequently, we obtain
□
Theorem 2.4
If \(ka_{1}=b_{2}\), \(b_{1}+k<0\), and \(r_{1}<0\), then, for \(\tau=\tau _{j}\) \((j=0,1,2,\ldots)\), system (1.2) undergoes a Hopf-zero bifurcation at equilibrium \((x_{+},z_{+})\).
3 Normal form for Hopf-zero bifurcation
In this section, we use the center manifold theory and normal form method [6, 23] to study Hopf-zero bifurcations. The normal form of a Hopf-zero bifurcation for a general delay-differential equations has been given in the following two papers: one is for a saddle-node-Hopf bifurcation [11], and the other is for a steady-state Hopf bifurcation [20]. After scaling \(t\rightarrow{t/\tau}\), system (2.3) becomes
Let \(\tau=\tau_{1}+\mu_{1}\), \(k=1+\frac{a_{2}}{a_{1}}+\mu_{2}\), where \(\mu_{1}\) and \(\mu_{2}\) are bifurcation parameters. Then system (3.1) can be written as
where \(M_{1}=\frac{1}{\varepsilon}[\frac {h_{1}z_{+}(q-x_{+}+1)}{(q+x_{+})^{2}}]x^{2}+\frac{1}{\varepsilon}\frac {-2qh_{1}}{q+x_{+}}xz +\frac{1}{\varepsilon}\frac{-2qh_{1}x_{+}}{(x_{+}+q)^{4}}x^{3}+\frac {1}{\varepsilon}\frac{2qh_{1}}{(x_{+}+q)^{3}}x^{2}z\).
Choose the phase space \(C=C([-1,0];R^{4})\) with supremum norm and define \(X_{t}\in{C}\) by \(X_{t}(\theta)=X(t+\theta)\), \(-\tau\leq\theta \leq0\), and \(\|X_{t}\|=\sup|X_{t}(\theta)|\). Then system (3.2) becomes
where
and
where \(L(\mu)\varphi=\int_{-1}^{0}d\eta(\theta,\mu)\varphi(\xi)\,d\xi\) for \(\varphi\in([-1,0],R^{4})\),
with
Consider the linear system
Between C and \(C'=C([0,\tau],C^{n*})\), the bilinear form is defined by
where \(\varphi(\theta)=(\varphi_{1}(\theta),\varphi_{2}(\theta),\varphi _{3}(\theta))\in{C}\), .
We know that \(L(0)\) has a pair of purely imaginary eigenvalues \(\pm {i\omega}\) \((\omega>0)\), a simple 0, and all other eigenvalues have negative real parts. Let \(\varLambda=\{i\omega,-i\omega,0\}\), let P be the generalized eigenspace associated with Λ, and let \(P^{*}\) is the space adjoint with P. Then C can be decomposed as \(C=P\bigoplus{Q}\), where \(Q= \{ \varphi\in{C}:(\psi,\varphi)=0 \mbox{ for all } \psi\in{P}^{*} \}\). We can choose the bases Φ and Ψ for P and \(P^{*}\) such that \((\varPsi(s),\varPhi(\theta))=I\), \(\dot{\varPhi}=\varPhi{J}\), and \(-\varPsi=J\varPsi\), where \(J=\operatorname{diag}(i\omega,-i\omega,0)\).
We calculate \(\varPhi(\theta)\) and \(\varPsi(s)\) as follows:
and
where
Let us enlarge the space C to the following space:
Its elements can be written as \(\psi=\varphi+X_{0}\alpha\) with \(\varphi \in{C}\), \(\alpha\in{\mathbb{C}^{n}}\), and
In BC, system (3.3) varies an abstract ODE:
where \(u\in{C}\), and A is defined by
and
Then the enlarged phase space BC can be decomposed as \(BC=P\oplus {\operatorname{Ker}\pi}\). Let \(X_{t}=\varPhi{x(t)}+\tilde{y}(\theta)\), where \(x(t)=(x_{1},x_{2},x_{3})^{T}\), namely
Let
Equation (3.4) can be expressed as
where \(\tilde{y}(\theta)\in{Q^{1}}:=Q\bigcap{C^{1}}\subset{\operatorname{Ker}\pi}\), and \(A_{Q1}\) is the restriction of A as an operator from \(Q_{1}\) to the Banach space Kerπ.
System (3.5) can be rewritten as
where
with
According to [25], \((\operatorname{Im}(M_{2}^{1}))^{c}\) is spanned by
with \(e_{1}=(1,0,0)^{T}\), \(e_{2}=(0,1,0)^{T}\), \(e_{3}=(0,0,1)^{T}\).
\((\operatorname{Im}(M_{3}^{1}))^{c}\) is spanned by
Then we get
where \(S_{1}\) and \(S_{2}\) are spanned, respectively, by
and
System (3.5) can be transformed on the center manifold in the following normal form:
We need to compute \(g_{2}^{1}(x,0,\mu)\) and \(g_{3}^{1}(x,0,\mu)\) in (3.6). We can compute \(\frac{1}{2}g_{2}^{1}(x,0,\mu)\):
where
Next, we compute \(g_{3}^{1}(x,0,\mu)\):
We can get \(\mathrm{Proj}_{S_{2}}f_{3}^{1}(x,0,0)\). Since
we have
where
Next, we compte \(\mathrm{Proj}_{S_{2}}[(D_{x}f_{2}^{1}(x,0,0))U_{2}^{1}(x,0)]\).
From [25] we know that because J is a diagonal matrix, the operators \(M_{j}^{1}, j\geq2\), are defined in \(V_{j}^{5}(\mathbb {C}^{3})\), so we have a diagonal representation relative to the canonical basis \(\{\mu^{p}x^{q}e_{k}:k=1,2,3,p\in\mathbb {{N}}_{0}^{2},q\in\mathbb{{N}}_{0}^{3},|p|+|q|=j\}\) of \(V_{j}^{5}(\mathbb{{C}}^{3})\), where \(e_{1}=(1,0,0)^{T}\), \(e_{2}=(0,1,0)^{T}\), \(e_{3}=(0,0,1)^{T}\). Clearly, we get
So
with \(\overline{\lambda}=(\lambda_{1},\lambda_{2},\lambda_{3})=(i\omega ,-i\omega,0)\). The elements of the canonical basis of \(V_{2}^{5}(\mathbb {C}^{3})\) are
the images of which under \(\frac{1}{i\omega}M_{2}^{1}\) are
Hence
where \(m=\frac{hz_{+}(q-x_{+}+1)}{(q+x_{+})^{2}}\), \(n=\frac {-2qh}{q+x_{+}}\), and \(h=\frac{1}{i\omega-a_{1}}\).
Therefore we obtain
where
Finally, we can compute \(\mathrm{Proj}_{S_{2}}[(D_{y}f_{2}^{1})(x,0,0)U_{2}^{2}(x,0)]\). Define \(h=h(x)(\theta)=U_{2}^{2}(x,0)\) and write
where \(h_{200}, h_{020}, h_{002}, h_{110}, h_{101}, h_{011}\in{Q^{1}}\). \((M_{2}^{2}h)(x)=f_{2}^{2}(x,0,0)\) decides the coefficients of h, which is equivalent to
We use the definitions of \(A_{Q^{1}}\) and π to obtain
where ḣ is the derivative of \(h(\theta)\) with respect to θ. Let
where \(A_{ijk}\in{C}\), \(0\leq{i,j,k}\leq2\), \(i+j+k=2\). We can compare the coefficients of \(x_{1}^{2}\), \(x_{2}^{2}\), \(x_{3}^{2}\), \(x_{1}x_{2}\), \(x_{1}x_{3}\), \(x_{2}x_{3}\), and we get that \(\overline{h}_{020}=h_{200}\), \(\overline{h}_{011}=h_{101}\), and the following differential equations are satisfied by \(h_{200}, h_{011}, h_{110}, h_{002}\), respectively:
where
Since
we have
which gives
Thus
where
So, we can obtain
Therefore, on the center manifold, the system \(\dot{x}=Jx+\frac {1}{2}g_{2}^{1}(x,0,\mu)+\frac{1}{6}g_{3}^{1}(x,0,\mu)+\mbox{h.o.t.}\) becomes
By changing variables \(x_{1}=\rho_{1}-i\rho_{2}\), \(x_{2}=\rho_{1}+i\rho _{2}\), \(x_{3}=\rho_{3}\), and introducing the cylindrical coordinates \(\rho_{1}=r\cos\theta\), \(\rho_{2}=r\sin\theta\), \(\rho_{3}=\gamma\), \(r>0\), system (3.11) becomes
where
Therefore we can get the system in the plane \((r,\gamma)\):
From [25] we know that Eq. (3.12) becomes
Choose \(\delta=\delta(\mu)\) such that
To simplify the above system, we only discuss the case of \(m_{20}\neq0, m_{03}\neq0\). Clearly, for small \(\alpha_{2}(\mu)\), the equation has two real roots. We take
Then \(\delta=\delta(\mu)\) is differentiable at \(\mu=0\), and \(\delta (0)=0\).
Define \(k_{1}=\alpha_{1}(\mu)+\beta_{11}\delta+\beta_{12}\delta^{2}\), \(k_{2}=\alpha_{2}(\mu)\delta+m_{02}\delta^{2}+m_{03}\delta^{3}\), \(a=\beta_{11}+2\beta_{12}\delta\), \(b=m_{20}+m_{21}\delta\), \(c=m_{02}+3m_{03}\delta\) and choose \(x=r, y=\gamma\). Then Eq. (3.13) becomes
Let
and
Then system (3.14) becomes
where
and
According to [25], we assume that
For small \(\eta_{1}\) and \(\eta_{2}\), the qualitative behavior of (3.15) near \((0,0)\) is the same as that of the following system (see [9]):
In Eq. (3.16), there are two trivial equilibrium points \(E_{1,2}=(0,\pm\sqrt{\eta_{2}}), \eta_{2}>0\), and two nontrivial equilibrium points \(E_{3,4}=(\sqrt{\frac{1}{2}B(-B\pm\sqrt{B^{2}-4\eta_{1}})+\eta_{1}+\eta _{2}},\frac{1}{2}(-B\pm\sqrt{B^{2}-4\eta_{1}}))\).
In [3] and [16], we can find the complete bifurcation diagrams of system (3.13). Here we list some of them.
Theorem 3.1
-
(a)
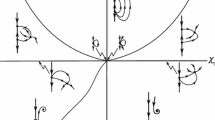
If \(B<0\), then the bifurcation diagram of system (3.13) consists of the origin and the following curves:
$$\begin{aligned} &M=\bigl\{ (\eta_{1},\eta_{2}):\eta_{2}=0, \eta_{1}\neq0\bigr\} , \\ &N=\biggl\{ (\eta_{1},\eta_{2}):\eta_{2}= \frac{1}{B^{2}}\eta_{1}^{2}+\vartheta \bigl( \eta_{1}^{3}\bigr),\eta_{1}\neq0\biggr\} . \end{aligned}$$Along M and N, a saddle-node bifurcation and pitchfork bifurcation occur, respectively. System (3.13) has no periodic orbits. Moreover, if \((\eta_{1},\eta_{2})\) is in the region between M and N, then the solution of system (3.13) goes asymptotically to one of the equilibrium points \(E_{1}\), \(E_{2}\), and \(E_{3}\).
-
(b)
If \(B>0\), then the bifurcation diagram of system (3.13) consists of the origin, the curves M and N, and the following curves:
$$\begin{aligned} &H=\bigl\{ (\eta_{1},\eta_{2}):\eta_{1}=0, \eta_{2}>0\bigr\} , \\ &S=\biggl\{ (\eta_{1},\eta_{2}):\eta_{1}=- \frac{B}{3B+2}\eta_{2}+\vartheta \bigl( \vert \eta_{2} \vert ^{3/2}\bigr),\eta_{2}>0\biggr\} . \end{aligned}$$Along M and N, we have exactly the same bifurcation as in (a). Along H and S, a Hopf bifurcation and a heteroclinic bifurcation occur, respectively. If \((\eta_{1},\eta_{2})\) lies between the curves H and S, then system (3.13) has a unique limit cycle, which is unstable and becomes a heteroclinic orbit when \((\eta_{1},\eta_{2})\in{S}\).
Figures 1 and 2 show (a) and (b) of Theorem 3.1, respectively.



The system is asymptotically stable around the equilibrium point for \((\mu_{1},\mu_{2})=(-0.17,-0.10)\). The green line represents x, the red line represents z. Waveform diagram for variable of \(x,z\) (left). Phase diagram for variable \((x,z)\) (right)

The system has an asymptotically stable periodic orbit near \(\tau_{1}\) for \((\mu_{1},\mu_{2})=(0.11,0.10)\). The green line represents x, the red line represents z. Waveform diagram for variable of \(x,z\) (left). Phase diagram for variable \((x,z)\) (right)

Waveform diagram for variable of \(x,z\). The first two figures show that when \(\tau=1.50<\tau_{10}\), the system is stable around the equilibrium point. When \(\tau=1.80>\tau_{10}\), the next two figures show that the system is unstable around the equilibrium point
4 Numerical simulations
In this section, we give some examples to explain the theoretical results. Set \(q=8\times10^{-4}\), \(h=\frac{2}{3}\), \(k=-2.5\), and \(\varepsilon=4\times10^{-2}\) and consider the following system:
By calculations we obtain \(a_{11}=0.8842-0.76654i\), \(a_{12}=-1.5560+1.1531\), \(a_{13}=2.1439-1.3414i\), \(a_{21}=2.9430\), \(a_{22}=2.4523\), \(a_{23}=-0.0483\), \(a_{24}=-1.6154\), \(b_{11}=-0.5236+0.0396i\), \(b_{12}=-1.0801+1.4187i\), \(b_{21}=-2.0122+0.0853i\), \(b_{22}=-1.8473\), \(c_{11}=0.0187-0.01301i\), \(c_{12}=0.0046-0.0033i\), \(c_{21}=-0.0171\), \(c_{22}=-0.0130\), \(d_{11}=-0.0005814-0.004575i\), \(d_{12}=-0.0007235-0.002548i\), \(d_{21}=-0.008275\), \(d_{22}=-0.002301\); the equilibrium point is \((0.8075,0.2307)\), and \(\tau_{1}=1.6735\). For small μ, we obtain \(k_{3}\neq0\).
5 Conclusions
In this article, we have discussed the Hopf-zero bifurcation of Oregonator oscillator with delay. We thoroughly analyze the distribution of the eigenvalues of the corresponding characteristic equation and find some specific conditions ensuring that all the eigenvalues have negative real parts. We also can discover the factors that make system (1.2) undergo a Hopf-zero bifurcation at equilibrium \((x_{+},z_{+})\). Meanwhile, by using the normal form method and the center manifold theorem we have derived the normal form of the reduced system on the center manifold and discussed the Hopf-zero bifurcation with parameters in system (1.2). Besides, we have obtained bifurcation diagrams and phase portraits of system (3.13) when \(B>0\) and \(B<0\), respectively. We also note that a saddle-node bifurcation and pitchfork bifurcation occur along M and N, respectively, and a Hopf bifurcation and a heteroclinic bifurcation occur along H and S, respectively. Finally, numerical stimulations (see Figure 3, 4 and 5) have been given to illustrate the theoretical results.
Our work is a further study of the Oregonator oscillator, which will be useful in the research of the complex phenomenon caused by high codimensional bifurcation of a delay-differential equation.
References
Cao, X., Song, Y., Zhang, T.: Hopf bifurcation and delay-induced Turing instability in a diffusive lac operon model. Int. J. Bifurc. Chaos 26(10), 1650167 (2016)
Chang, X., Wei, J.: Hopf bifurcation and optimal control in a diffusive predator–prey system with time delay and prey harvesting. Nonlinear Anal., Model. Control 17(4), 379–409 (2012)
Chow, S.N., Li, C., Wang, D.: Normal forms and bifurcation of planar vector fields. Cambridge (1994)
Ding, W., Liao, X.F., Dong, T.: Hopf bifurcation in a love-triangle model with time delays. Neurocomputing 260, 13–24 (2017)
Ding, Y., Jiang, W., Yu, P.: Hopf-zero bifurcation in a generalized Gopalsamy neural network model. Nonlinear Dyn. 70, 1037–1050 (2012)
Faria, T., Magalhaes, L.T.: Normal forms for retarded functional differential equation with parameters and applications to Hopf bifurcation. J. Differ. Equ. 122(2), 181–200 (1995)
Gazor, M., Sadri, N.: Bifurcation control and universal unfolding for Hopf-zero singularities with leading solenoidal terms. SIAM J. Appl. Dyn. Syst. 15, 870–903 (2016)
Guo, Y., Jiang, W.: Hopf bifurcation in two groups of delay-coupled Kuramoto oscillators. Int. J. Bifurc. Chaos 25(10), 1550129 (2015)
Isaac, A.G., Jaume, L., Susanna, M.: On the periodic orbit bifurcating from a zero Hopf bifurcation in systems with two slow and one fast variables. Appl. Math. Comput. 232, 84–90 (2014)
Jaume, L., Zhang, X.: On the Hopf-zero bifurcation of the Michelson system. Nonlinear Anal., Real World Appl. 12, 1650–1653 (2011)
Jiang, H., Jiang, J., Song, Y.: Normal form of saddle-node-Hopf bifurcation in retarded functional differential equations and applications. Int. J. Bifurc. Chaos 26, 1650040 (2016)
Jiang, W., Wang, H.: Hopf-transcritical bifurcation in retarded functional differential equations. Nonlinear Anal. 73, 3626–3640 (2010)
Jiang, W., Wang, J.: Hopf-zero bifurcation of a delayed predator–prey model with dormancy of predators. J. Appl. Anal. Comput. 7, 1051–1069 (2017)
Jimenez-Prieto, R., Silva, M., Perez-Bendito, D.: Analytical assessment of the oscillating chemical reactions by use chemiluminescence detection. Talanta 8(44), 1463–1472 (1997)
Kaplan, D.T., Glass, L.: In Understanding Nonlinear Dynamics. Springer, Berlin (1995)
Kuznetsov, Yu.: Elements of Applied Bifurcation Theory, 3rd edn. Springer, Berlin (2004)
Liu, Z., Yuan, R.: Zero-Hopf bifurcation for an infection-age structured epidemic model with a nonlinear incidence rate. Sci. China Math. 60(8), 1371–1398 (2017)
Marsden, J.E., Sirovich, L., John, F.: Nonlinear Oscillations, Dynamical System, and Bifurcations of Vector Fields. Nonlinear Mathematical Sciences, vol. 42 (2002)
Rodrigo, D., Jaume, L.: Zero-Hopf bifurcation in a Chua system. Nonlinear Anal., Real World Appl. 37, 31–40 (2017)
Song, Y., Jiang, J.: Steady-state, Hopf and steady-state-Hopf bifurcations in delay differential equations with applications to a damped harmonic oscillator with delay feedback. Int. J. Bifurc. Chaos 22, 1250286 (2012)
Takens, F.: Lecture Notes in Math, vol. 3, pp. 56–78. Springer, Berlin (1981)
Tian, X., Xu, R.: The Kaldor–Kalecki stochastic model of business cycle. Nonlinear Anal., Model. Control 16(2), 191–205 (2011)
Wang, H., Wang, J.: Hopf-pitchfork bifurcation in a two-neuron system with discrete and distributed delays. Math. Methods Appl. Sci. 38(18), 4967–4981 (2015)
Wang, Y., Wang, H., Jiang, W.: Hopf-transcritical bifurcation in toxic phytoplankton–zooplankton model with delay. J. Math. Anal. Appl. 415, 574–594 (2014)
Wu, X., Wang, L.: Zero-Hopf bifurcation for van der Pol’s oscillator with delayed feedback. J. Comput. Appl. Math. 235, 2586–2602 (2011)
Wu, X., Wang, L.: Zero-Hopf bifurcation analysis in delayed differential equations with two delays. J. Franklin Inst. 354, 1484–1513 (2017)
Wu, X., Zhang, C.R.: Dynamic properties of the coupled Oregonator model with delay. Nonlinear Anal., Model. Control 18, 359–376 (2013)
Yang, J., Zhao, L.: Bifurcation analysis and chaos control of the modified Chua’s circuit system. Chaos Solitons Fractals 77, 332–339 (2017)
Zhao, H., Lin, Y., Dai, Y.: Hopf bifurcation and hidden attractors of a delay-coupled Duffing oscillator. Int. J. Bifurc. Chaos 25(12), 1550162 (2015)
Acknowledgements
The authors wish to express their gratitude to the editors and the reviewers for the helpful comments.
Funding
This research is supported by the Heilongjiang Provincial Natural Science Foundation (No. A2015016).
Author information
Authors and Affiliations
Contributions
The idea of this research was introduced by YC, LL and CZ. All authors contributed to the main results and numerical simulations and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Cai, Y., Liu, L. & Zhang, C. Hopf-zero bifurcation of Oregonator oscillator with delay. Adv Differ Equ 2018, 438 (2018). https://doi.org/10.1186/s13662-018-1894-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1894-2