
Abstract
We consider a class of three parameter static and axially symmetric metrics that reduce to the Janis–Newman–Winicour (JNW) and \( \gamma \)-metrics in certain limits of the parameters. We obtain rotating form of the metrics that are asymptotically flat, stationary and axisymmetric. In certain values of the parameters, the solutions represent the rotating JNW metric, rotating \( \gamma \)-metric and Bogush–Gal’tsov (BG) metric. The singularities of rotating metrics are investigated. Using the light-ring method, we obtain the quasi normal modes (QNMs) related to rotating metrics in the eikonal limit. Finally, we investigate the precession frequency of a test gyroscope in the presence of the rotating metrics.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Intruduction
In general relativity, singularities appear at those points where the curvature invariants of space-time become infinite. In the 1960s, it was shown that the existence of the singularity is an absolute consequence of the theory of general relativity [1,2,3]. Such singularities also exist in the form of infinite mater density. They are classified into two types including black holes and naked singularities. Unlike black holes, which singularities are hidden by an event horizon and therefore cannot be directly observed, naked singularities may show other types of effects from outside.
The strong cosmic censorship conjecture asserts that no naked singularities can exist and they are not visible to any observer [4, 5]. However, some recent theoretical investigations present us with some striking physical processes that create naked singularities [6,7,8]. Black holes can have only charge, mass and angular momentum based on the no-hair theorem. However, other astrophysical objects such as planets, neutron stars, white dwarfs etc can have higher-order multiple moments and, therefore, both of these objects and naked singularities that have the same multiple moments have similar exterior metric.
Two of the solutions of Einstein equations that represent naked singularity are the \( \gamma \)-metric (also known as q-metric or Zipoy–Voorhees metric) [9,10,11,12] and the Janis–Newman–Winicour (JNW) metric [13,14,15], which are asymptotically flat and axially symmetric metrics. The \( \gamma \)-metric is written in vacuum, while the singularity of the JNW metric is essentially sourced by existence of a massless scalar field. The JNW metric reduces to the Schwarzschild metric in the absence of the scalar field. Until today, many studies have been done on \( \gamma \)-metric and JNW space-time. For example see the following papers and references therein. Geodesics of JNW metric was studied in [16, 17]. The role of a scalar field in gravitational lensing studied in [18, 19] and high energy collisions in this space-time was investigated in [20]. For study in \( \gamma \)-metric see [21,22,23,24,25,26,27,28,29,30,31,32] and references.
In this article, we study a general three parameter metric in the presence of the scalar field, from which JNW and \( \gamma \)-metrics can be obtained in certain values of the parameters. Considering that almost most of celestial bodies rotate around themselves, it is interesting to derive a rotating form of this class of three parameter metrics. It should be noted that, despite many studies, rotating solutions for the JNW metric that have been proposed to date, were not correct, because, the metrics don’t satisfy the Einstein field equations [33, 34]. In this paper, we introduce a class of stationary and axially symmetric rotating metrics that include the rotating JNW, Bogush–Gal’tsov (BG) [34] and rotating \( \gamma \)-metric and also many more new rotating metrics that can be obtained in certain limits of the three parameters.
One way to better understand black holes and naked singularities is to study their interactions with the surrounding environment because it is impossible to find them in isolation. These interactions usually result in space-time perturbations. For the first time, Regge and Wheeler investigated a category of gravitational perturbations in Schwarzschild geometry, even before the concept of a black hole was born [35]. In 1970s, numerical analysis of these perturbations showed that when a compact astrophysical object is perturbed, gravitational waves with damped oscillations are emitted. These waves are known as quasi-normal modes (QNMs).
When space-time is perturbed, it emits gravitational waves that change over time, so that initially we have a burst of radiation in a short time, then over a long period of time, the black hole loses a lot of energy by emitting QNMs. Finally, after a very long period of time, the QNMs are suppressed.
Analytical and numerical analysis of QNMs shows that the frequencies obtained for QNMs depend only on the parameters of the astrophysical objects, while the amplitude of these QNMs depends on the perturbation source of the oscillation. There are several methods to calculate QNMs, for reviews see [36,37,38,39,40,41] and references therein.
We will study QNMs of the rotating metrics in the following sections. We also investigate the precession frequency due to the Lense–Thirring (LT) and de Sitter effects of a gyroscope in the case of rotating space-times. A test gyroscope is a suitable device for studying the properties of rotating space times.
The paper is organized as follows, in Sect. 2, we consider a class of three parameter metrics that at certain values of the parameters represent the JNW and \( \gamma \)-metrics. Then, in Sect. 3, we generalize the static metrics and obtain a class of axially symmetric rotating solutions of Einstein’s equations and explain special values of the parameters that one may derive rotating \( \gamma \)-metric and rotating JNW solution. In Sect. 4, we numerically investigate the singularities of rotating metrics. In Sect. 5, the QNMs of the axially symmetric rotating metrics are derived in the eikonal limit. In Sect. 6, we will consider a test gyroscope and calculate the precession frequency of it in the rotating space-times that we introduced. Finally, Sect. 7 is devoted to the conclusions.
In this paper \( c = G = \hbar = 1 \).
2 A class of three parameter static metrics in the presence of a radial scalar field
In this section, we are going to represent a class of three parameter metrics that are static and axially symmetric and reduce to the Janis–Newman–Winicour (JNW) and \( \gamma \)-metrics in certain limits of the parameters. At the beginning, we write the Einstein–Hilbert action when minimally coupled to a massless scalar field as follows
The field equations related to the above action are
We can write a general solution of the equations of motion by the following class of three parameter static metrics [42]
where,
and \( \mu \) and \( \nu \) are defined as
where the physical mass is given by \( M = \gamma \, m \). A solution for the scalar field can be obtained as follows
According to Eqs. (5) and (6), the following conditions must be satisfied
Furthermore, all components of the Ricci tensor are zero except the \( R_{r r} \), which is \( R_{r r} = 8 \, \pi \, \partial _r \varphi \, \partial _r \varphi \).
Different limits of metric in Eq. (3) leads to the following well known metrics. Let us suppose that \( \mu = 1 - \gamma \, (\nu = 0) \), therefore, the metric (3) reduces to the JNW metric. Also, using the following values for the parameters
the metric in Eq. (3) becomes \( \gamma \)-metric and the scalar field in Eq. (6) vanishes. It should be noted that vacuums are different in general relativity in the presence of a scalar field and without the scalar field.
For other values of parameters \( \mu \) and \( \nu \), metric in Eq. (3) interpolate between JNW and \( \gamma \)-metric and represent infinitely many different metrics with naked singularities. Two interesting cases of Eq. (3) are \( \mu = - \nu \), \( \gamma = 1 \) and \( \mu =0, \nu =1-\gamma \), that we will study their rotating forms in the following sections.
3 A class of rotating naked singularities
There are different ways to obtain rotating solutions of the Einstein’s equations. For example the Janis–Newman algorithm can be used to obtain some type of rotating metrics [43,44,45]. By using Ernst’s method, it is possible to obtain the Kerr-Newman solution and rotating \( \gamma \)-metric [46,47,48,49,50,51,52,53].
In this section, we first introduce rotating form of the general class of metrics in Eq. (3) and then explain about the related Ernst potential.
Consider the following stationary and axisymmetric line element which is written in the prolate coordinates \( (t, x, y, \phi ) \)
where, \( \sigma \) is a positive constant and f, \( \eta \), and \( \omega \) depend only on x and y. The rotating metric functions are
Here a is the rotation parameter and \( q = \gamma - 1 \) is the quadrupole parameter and \( \nu \) was defined in (5). Moreover
and
Besides, relation to the spherical coordinates are as follows
The solution for scalar field equation (\( \Box \varphi = 0 \)) is given by
The Ricci tensor related to the metric in Eq. (9) can be obtained as follows
One can check the correctness of this class of rotating solutions simply by using Mathematica or Maple packages and a laptop. In certain values of the parameters the metric that defined in (9) represents rotating form of the following metrics:
(a) By choosing \( \nu = 1 - \gamma ^2 \) in Eq. (12), we obtain the rotating \( \gamma \)-metric [54, 55].
(b) Assuming a non-zero value for \( \nu \) in Eq. (12) and setting q equal to zero (\( \gamma = 1 \)) in all equations, we will have Bogush–Gal’tsov (BG) metric [34]
where \( \Delta \) and \( \rho \) are as follows
Considering Eq. (16) and the fact that \( \gamma =1 \), then we must always have \( \nu \le 0 \).
The Ricci scalar for the BG metric is as follows
The Ricci scalar becomes infinite at \( r=m\pm \sqrt{m^2-a^2} \). Also, the Ricci and Kretschmann scalars are curvature invariants and their singularities coincide.
(c) Another interesting limit is \( \mu = 0 \) and \( \nu = 1 - \gamma \), that leads to a new form of metric that we will study its QNMs in Sect. 5. In this metric (\( \mu =0,\,\nu =1-\gamma \)), according to the Eq. (16), we have
(d) Finally, if we set \( \nu \) equal to zero and for non-zero values of q, we obtain for the first time a correct form of the rotating JNW metric. In this condition if we put \( a = 0 \), the metric reduces to the JNW metric. For non-zero values of a and \( q = 0 \) (\( \gamma = 1 \)), the rotating metric becomes the Kerr metric. In the rotating JNW metric (\( \nu =0,\,\mu =1-\gamma \)), according to Eq. (16), we have
Now, we describe a method for obtaining metric functions. For this purpose, we write the metric in Eq. (10) in \( (t, \rho , z, \phi ) \) coordinates
where
In the following we are going to obtain metric functions.
Using \( R_{t t} \) and \( R_{t \phi } \), we can derive the following equations (To see the components of the Ricci tensor, refer to the Appendix)
According to Eq. (26), a function u can be defined as follows
By using Eq. (27), we can write Eq. (25) as follows
that \( \nabla ^2 f \) is equal to
Also, according to Eq. (27), we can write the following relation for u
Using the \( R_{\rho z} \) and Eq. (27), we have
Also, using \( R_{\rho \rho } \) and \( R_{z z} \) and Eq. (27), we have
Now by using prolate coordinates \( (t, x, y, \phi ) \), Eqs. (27, 31 and 32) can be represented as follows
Now we define a complex function E as follows
Now, with the definition (36), we can display Eqs. (28) and (30) in prolate coordinates with the following relation
where \( E^* \) is the complex conjugate of (36) and we define
It can be shown that the following Ernst potential consistently explains the rotating solutions
with
and
Now, if we take the derivative of Eq. (34) with respect to y, the obtained answer must be equal to the derivative of Eq. (35) with respect to x. This condition gives us a second order differential equation that we can use to obtain the scalar field as follows
where, constant numbers can be obtained from Einstein’s equations and boundary conditions. Therefore, using this conditions the above constants \( c_1 \) and \( c_2 \) can be written as follows
Therefore we have obtained Eq. (16) for the scalar field. It should be noted that using the Janis–Newman algorithm does not give us a correct form of rotating JNW metric. However, our solution is exact and has a correct form for a large class of rotating metrics that include correct form of the JNW metric.
4 Kretschmann scalar for rotating metrics
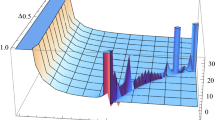
In Sect. 3, we obtained the rotating metrics, which are axially symmetric and asymptotically flat. In this section, we shall study the singularity structure of these metrics. For this purpose, we investigate the Kretschmann scalar (\( K(r, \theta ) \)) related to these metrics. Although it is possible to calculate the Kretschmann scalar accurately, the answer is long and complicated. Therefore, we will investigate it numerically. We expect that our results will be such that, firstly, the Kretschmann scalar tends to zero at infinity, secondly, its values at constant r are symmetric with respect to \( \theta = \pi /2 \) and thirdly, the radius of the outer singularity is \( r_s = m + \sqrt{m^2 - a^2} \), and as a result, the graphs around this value diverge at a constant \( \theta \). The Kretschmann scalar is depicted in Fig. 1.

The Kretschmann scalar \( K(r, \theta ) \) for \( m = 1 \) and \( a = 0.8 \). a \( K(r, \pi /2) \), \( q = -0.015 \) for rotating JNW metric (solid red), \( \nu = - 0.08 \) for BG metric (black dash) and \( q = - 0.015 \) for rotating metric at \( \nu =-q \) (blue dot-dash). K diverges at near \( r = 1.6 \) and for all values of \( \theta \), the singularities exist and occur irrespectively of the value of \(\theta \). b \( K(18, \theta ) \), where \( q = -0.015 \) for rotating JNW metric (solid red), \( \nu = - 0.08 \) for BG metric (black dash) and \( q = - 0.35 \) for rotating metric at \( \nu =-q \) (blue dot-dash). K is a symmetric function with respect to \( \theta = \pi / 2 \)
According to Fig. 1, it can be clearly seen that the behavior of the Kretschmann scalar fulfill all our expectations.
5 QNMs in the eikonal limit and for slowly rotating metrics
In this section, we are going to calculate the QNMs of some special cases of the rotating metrics. For deriving QNMs, we use the light-ring method. More explanation about this method is given in Refs. [56,57,58].
We shall study rotating JNW metric (\( \nu = 0 \) or \( \mu = 1 - \gamma \)), BG metric (\( \mu = - \nu \) 0r \( \gamma = 1 \)) and the rotating metric at \( \nu =-q \) as follows.
5.1 QNMs of rotating JNW metric \( (\nu =0) \)
First, we investigate QNMs related to the rotating JNW metric. We replace transformations (15) in the metric (9). Then, by putting \( \nu = 0 \) in Eq. (12) and expanding the result to second order in a and first order in q and, for simplicity, also assuming that q is of order \( a^2 \) and therefore terms proportional to \( a\,q \) are negligible, we have
It should be noted that we will use these approximations in all subsequent calculations.
If we consider QNMs as \( Q = \Omega + i \, \Gamma \), in the eikonal limit by using the light-ring method \( \Omega \) can be written as \( \pm \, j \, \Omega ^\prime \), where \( j \in \mathbb {Z} \) and \( \Omega ^\prime \) is the orbital frequency of the null rays on circular orbits. In our axisymmetric space-time background the massless wave perturbations can be written as superposition of the following eigenmodes
where, \( \Omega \) and S are the wave’s frequency and spin respectively. Also, j and \( \iota \) are angular momentum parameters with condition \( |\iota |\le j \). In the eikonal limit, it is assumed that \( \Omega \gg 1/M \) and \( |\iota |= j \gg 1 \). It can be seen from the results of numerical calculations for QNMs of black holes such as [56,57,58] that the oscillation frequency of such perturbations is as follows
which is the same as the oscillation of QNMs.
To calculate \( \Omega ^\prime \), firstly, we obtain the radius of unstable null circular equatorial geodesic orbits, \( r_0 \), from the following relations
and
where the former holds for every null path and the later is the radial component of the geodesic equation. We use metric in Eq. (44) and simplify Eqs. (47) and (48) as follows
By equating the right hand sides of Eqs. (49) and (50) and using the following perturbation
where 3m is light ring radius of Schwarzschild black hole and \( \bar{\epsilon } \) is a perturbation parameter (and \(r \equiv r_{0_{JNW}}\)). Now, keep perturbation terms up to first order of \( \bar{\epsilon } \), we have
By putting \( r_{0_{JNW}} \) in metric elements in Eq. (47) or Eq. (48), we get
The other part of QNMs, \( \Gamma \), shows the decay rate of their amplitude. On the other hand, this rate corresponds to the divergence of the null rays on the circular orbit in the eikonal limit. To obtain \( \Gamma \), we should perturb the null equatorial circular orbit and therefore, we add a small perturbation in the coordinates \( \bar{x}^\mu = (t, r, \theta , \phi ) = (t, r_0, \frac{\pi }{2}, \Omega ^\prime t) \) as follows
where, \( \epsilon \) is a very small perturbation parameter and the initial conditions for f(t) , g(t) and h(t) are as follows
It is clear from our definition of \( \Omega \) in Eq. (46) that \( g(t) = 0 \).
The perturbed propagation vector (up t0 \( O(e^2) \) ) can be obtained as follows
where, prime refers to derivative with respect to t. If we assume \( \rho \) is the density of null rays the conservation law for a congruence of null rays may be written as
If we neglect terms proportional to powers of \( \epsilon \), we have
So, by having f(t) , one can calculate \( \rho \). To obtain f(t) , one can use the radial component of geodesic equation that is as follows
Now, if we put \( \theta = \pi /2 \) and expand Eq. (59) to the first order of \( \epsilon \) we have the following differential equation for f(t)
Therefore, f(t) is given by
where \( \zeta \) is
By replacing f(t) in Eq. (58), we derive the density of null rays as follows
Therefore one can derive the imaginary parts of the QNMs as follows
Eventually, QNMs for the rotating JNW metric are given by
Eq. (65) in the limit \( a = 0 \) gives us the QNMs corresponding to the static JNW metric and in the limit \( q = 0 \) it gives the QNMs of the Kerr metric [57].

\(\Gamma -\Omega \) plot related to Eq. (65), where \( m = 4 \), \(n \in \{100, 200, 300, 400, 500\} \) and \( j \in \{ n, n + 100, \dots , 500 \} \). Dashed lines on the plots show \( n = 100 \) to \( n = 500 \) respectively from top to bottom. a \( a = 0.1 \) (red), \( a = 0.3 \) (orange), \( a = 0.5 \) (yellow), \( a = 0.7 \) (green), \( a = 0.9 \) (blue) and \( q \in [-0.06,-0.03] \). b \( q = - 0.1 \) (red), \( q = - 0.08 \) (orange), \( q = - 0.06 \) (yellow), \( q = -0.04 \) (green), \( q = - 0.02 \) (blue) and \( a \in [0.3,0.9] \)
In Fig. 2, we have depicted the QNMs in Eq. (65).
5.2 QNMs of the BG metric
In this part, we are going to calculate the QNMs of the BG metric by using the light-ring method. By replacing transformations (15) in the metric (9) and with condition \( q = 0 \) in Eqs. (12–14) and expanding the results to first order in \( \nu \) and second order in a and neglecting terms proportional to \( a \nu \), we have
By performing calculations similar to subsection 5.1, QNMs to the BG metric are obtained as follows
Figure 3 shows the QNMs related to the BG metric.

\(\Gamma -\Omega \) plot related to Eq. (67), where \( m = 4 \), \(n \in \{100, 200, 300, 400, 500\} \) and \( j \in \{ n, n + 100, \dots , 500 \} \). Dashed lines on the plots show \( n = 100 \) to \( n = 500 \) respectively from top to bottom. a \( a = 0.64 \) (red), \( a = 0.72 \) (orange), \( a = 0.80 \) (yellow), \( a = 0.88 \) (green), \( a = 0.96 \) (blue) and \( \nu \in [-0.3,0) \). b \( \nu = - 0.01 \) (red), \( \nu = - 0.06 \) (orange), \( \nu = - 0.11 \) (yellow), \( \nu = -0.16 \) (green), \( \nu = - 0.21 \) (blue) and \( a \in [0.3,0.9] \)
5.3 QNMs for a rotating metric with \( \mu =0 \; (\nu =1-\gamma ) \)
Now, we intend to obtain the QNMs corresponding to the case where \( \mu = 0 \) (\( \nu = 1 - \gamma \)) in Eq. (12). By replacing transformations (15) in the metric (9) and expanding the result to first order in perturbation parameter q and second order in rotation parameter a and neglecting terms proportional to aq, we have
Similar to the previous subsection, the QNMs of this metric are obtained as follows \( (\nu = - q) \)
According to Eqs. (65), (67) and (69), it is clear that in the real part of the QNMs (\(\Omega \)), the first three terms are equal for all metrics, and the rotating JNW metric and the rotating metric at \( \nu =-q \) have an additional term \( (q\,\ln 3) \) compared to the BG metric. In the BG metric, since \(q = 0\), \( (q\,\ln 3) \), term does not exist.
Considering the equality of the real parts of the rotating JNW metric \( (\nu =0) \) and the rotating metric at \( \nu =-q \), it is clear that the frequencies emitted from the rotating metrics are the same.
In the imaginary part of QNMs, the first two terms are the same for all three metrics and the rest of the terms for rotating JNW and BG metrics and rotating metric at \( \nu =-q \) are equal to \( - 1.10\,q \), \( -0.14\,\nu \) and \( -0.95\,q \) respectively. q and \( \nu \) are both negative values, so it can be said that rotating metric at \( \nu = -q \) is more stable than rotating JNW metric. The BG space-time is more stable than the rotating JNW space-time if \(\nu \) in the BG metric is equal to q in the rotating JNW metric. It can also be shown that for certain values of the parameters, the BG space-time is more stable than the rotating metric at \( \nu = -q \).
6 Precession frequency of rotating metrics
General relativity states that the spin of a gyroscope precess for two reasons, one is due to the curvature of space-time caused by the existence of the object and the other is due to the rotation of the object.
The spin precession of a gyroscope according to the presence of matter was first described by Willem de Sitter in 1916 and is known as the de Sitter effect (also called geodetic precession or de Sitter precession) [59].
When the object rotates, the inertial frame is dragged along it. Also, the rotation of a massive object causes the precession of the spin in a test gyroscope close to it. This effects was first stated by Josef Lense and Hans Thirring (1918) and is known as Lense–Thirring (LT) precession or LT effect [60].
In this section, we want to investigate the LT and de Sitter effects on the metrics of the previous sections.
The precession frequency vector in Copernican frame for any arbitrary stationary metric is as follows [61]
where \( \epsilon _{i j k} \) is the Levi-Civita symbol. In the case of axially symmetric metrics that we are dealing with, Eq. (70) becomes the following relation
The magnitude of the vector in Eq. (71) is
Now, in addition to the LT precession effect, if we also consider the de Sitter effect, the relation of the total precession frequency vector is as follows [62]
where \( \Omega \) represents the angular velocity of the gyroscope.
Equation (73) for axisymmetric space time becomes
The magnitude of total precession frequency vector is
In the following we derive precession frequencies of the rotating metrics that were introduced in Sect. 5. Also, we use the approximations from the previous section to calculate the precession frequencies.
6.1 Precession frequency in rotating JNW metric
In this part, we are going to calculate the precession frequency for rotating JNW metric. For this, we use the metric in Eq. (44).
Using Eqs. (71) and (72) for the rotating JNW metric, we have
The above relation shows the precession frequency due to the LT effect for the rotating JNW metric. Now we are going to obtain the total precession frequency for the rotating JNW metric by combining the de Sitter and LT effects. Therefore, by using Eqs. (74) and (75) and expanding the result to first order in a and m and negative third order r, we have
6.2 Precession frequency for the BG metric
By using the metric in Eq. (66) and Eqs. (71) and (72), we have
To obtain the total precession frequency for BG metric, we use Eqs. (74) and (75) and expanding the result to first orders in a, m and \( r^{-3} \)
6.3 Precession frequency for a rotating metric with \( \mu =0 \; (\nu = 1 - \gamma \))
According to metric (68) and Eqs. (71) and (72), \( \Omega _{LT} \) in this case \( (\mu =0) \) is equal to
The total Precession frequency \( \Omega _F \) for this case is equal to the total Precession frequency of the rotating JNW metric, i.e. Eq. (77).

The behavior of Precession frequency for \( m = 1 \), \( a = 2 \) and \( q = - 1 \). a \( \Omega _{LT} \) vs r for rotating JNW and BG metrics and rotating metric at \( \nu =-q \) (solid red). According to Eqs. (76), (78) and (80) \( \Omega _{LT} \) is infinite in \( r = 2\,m \). b \( \Omega _{F} \) vs \( \Omega \) with \( r = 3 \) for rotating JNW metric and rotating metric at \( \nu = -q \) (solid red) and BG metric (black dash). By increasing the angular velocity of the gyroscope, the related precession frequency decreases
Figure 4 is related to the precession frequency. Panel a shows the graph of \( \Omega _{LT} \) versus a, and the behavior of \( \Omega _{F} \) versus \( \Omega \) is depicted in panel b.
The Eqs. (76), (78) and (80) show that the precession frequency due to the LT effect is the same for rotating JNW and BG metrics and rotating metric at \( \nu =-q \). Considering the total precession frequency (\(\Omega _{F}\)), both the rotating JNW metric and the rotating metric at \( \nu = -q \) have an additional term compared to the BG metric (\(q=0\)). The total frequency of the BG metric is greater than in the other cases.
By comparing the QNMs with the precession frequencies, we conclude that the method of QNMs is more accurate for observing the differences between the investigated rotating metrics.
7 Conclusion
We considered a class of three parameter static metrics that becomes \( \gamma \)-metric and JNW metric in certain values of the parameters [42]. We found a general class of rotating forms of the three parameter metrics. The rotating solutions in certain values of the parameters turns into the well known rotating solution of the \( \gamma \)-metric. Also, we can find Bogush–Gal’tsov (BG) metric.
We obtained a correct form of the rotating JNW metric and we studied its Kretschmann scalar, quasi normal modes (QNMs) and precession frequency. Many different new calculations can be done on this large class of rotating metrics in the future. For example, one may consider exact and non-perturbative forms of the rotating metrics and obtain QNMs and precession frequencies for them by numerical methods.
Data Availability Statement
This manuscript has no associated data or the data will not be deposited. [Authors’ comment: This is a theoretical study and no experimental data.]
References
R. Penrose, Gravitational collapse and space-time singularities. Phys. Rev. Lett. 14, 57 (1965). https://doi.org/10.1103/PhysRevLett.14.57
S.W. Hawking, The occurrence of singularities in cosmology. III. causality and singularities. Proc. Math. Phys. Eng. Sci. 300, 187 (1967). https://doi.org/10.1098/rspa.1967.0164
S.W. Hawking, R. Penrose, The singularities of gravitational collapse and cosmology. Proc. Math. Phys. Eng. Sci. 314, 529 (1970). https://doi.org/10.1098/rspa.1970.0021
R. Penrose, Gravitational collapse: the role of general relativity. Nuovo Cimento Rivista Serie 1, 252 (1969). https://ui.adsabs.harvard.edu/abs/1969NCimR 1252P/abstract
S. Hawking, W. Israel, D. Liebscher, General relativity: an Einstein centenary survey. Astron. Nachr. 301, 331 (1980). https://ui.adsabs.harvard.edu/abs/2010grae.book H/abstract
L. Ford, L. Parker, Creation of particles by singularities in asymptotically flat spacetimes. Phys. Rev. D 17, 1485 (1978). https://doi.org/10.1103/PhysRevD.17.1485
W.A. Hiscock, L.G. Williams, D.M. Eardley, Creation of particles by shell-focusing singularities. Phys. Rev. D 26, 751 (1982). https://doi.org/10.1103/PhysRevD.26.751
R. Casadio, B. Harms, Can black holes and naked singularities be detected in accelerators? Int. J. Mod. Phys. A 17, 4635 (2002). https://doi.org/10.1142/S0217751X02012259
G. Darmois, Mémorial des sciences mathématiques, Fascicule XXV (Gauthier-Villars, Paris, 1927). http://www.numdam.org/series/
G. Erez, N. Rosen, The gravitational field of a particle possessing a multipole moment type, Tech. Rep. (1959). https://www.osti.gov/biblio/4201189
D.M. Zipoy, Topology of some spheroidal metrics. J. Math. Phys. 7, 1137 (1966). https://doi.org/10.1063/1.1705005
B. Voorhees, Static axially symmetric gravitational fields. Phys. Rev. D 2, 2119 (1970). https://doi.org/10.1103/PhysRevD.2.2119
I. Fisher, Scalar mesostatic field with regard for gravitational effects. Zh. Eksp. Teor. Fiz. 18, 636–640 (1948). arXiv:gr-qc/9911008
A.I. Janis, E.T. Newman, J. Winicour, Reality of the Schwarzschild singularity. Phys. Rev. Lett. 20, 878 (1968). https://doi.org/10.1103/PhysRevLett.20.878
M. Wyman, Static spherically symmetric scalar fields in general relativity. Phys. Rev. D 24, 839 (1981). https://doi.org/10.1103/PhysRevD.24.839
A.N. Chowdhury, M. Patil, D. Malafarina, P.S. Joshi, Circular geodesics and accretion disks in the Janis–Newman–Winicour and gamma metric spacetimes. Phys. Rev. D 85, 104031 (2012). https://doi.org/10.1103/PhysRevD.85.104031
B. Turimov, B. Ahmedov, M. Kološ, Z. Stuchlík, Axially symmetric and static solutions of Einstein equations with self-gravitating scalar field. Phys. Rev. D 98, 084039 (2018). https://doi.org/10.1103/PhysRevD.98.084039
K. Virbhadra, D. Narasimha, S. Chitre, Role of the scalar field in gravitational lensing. Astron. Astrophys. 337, 1–8 (1998). arXiv:astro-ph/9801174
T.K. Dey, S. Sen, Gravitational lensing by wormholes. Mod. Phys. Lett. 23, 953 (2008). https://doi.org/10.1142/S0217732308025498
M. Patil, P.S. Joshi, Acceleration of particles by Janis–Newman–Winicour singularities. Phys. Rev. D 85, 104014 (2012). https://doi.org/10.1103/PhysRevD.85.104014
L. Herrera, F.M. Paiva, N. Santos, Geodesics in the \(\gamma \) spacetime. Int. J. Mod. Phys. D 9, 649 (2000). https://doi.org/10.1142/S021827180000061X
L. Richterek, J. Novotnỳ, J. Horskỳ, Einstein–Maxwell fields generated from the \(\gamma \)-metric and their limits. Czech. J. Phys. 52, 1021 (2002). https://doi.org/10.1023/A:1020581415399
H. Chakrabarty, C.A. Benavides-Gallego, C. Bambi, L. Modesto, Unattainable extended spacetime regions in conformal gravity. J. High Energy Phys. 2018, 1 (2018). https://doi.org/10.1007/JHEP03(2018)013
A.B. Abdikamalov, A.A. Abdujabbarov, D. Ayzenberg, D. Malafarina, C. Bambi, B. Ahmedov, Black hole mimicker hiding in the shadow: optical properties of the \(\gamma \) metric. Phys. Rev. D 100, 024014 (2019). https://doi.org/10.1103/PhysRevD.100.024014
B. Toshmatov, D. Malafarina, N. Dadhich, Harmonic oscillations of neutral particles in the \(\gamma \) metric. Phys. Rev. D 100, 044001 (2019). https://doi.org/10.1103/PhysRevD.100.044001
C.A. Benavides-Gallego, A. Abdujabbarov, D. Malafarina, B. Ahmedov, C. Bambi, Charged particle motion and electromagnetic field in \(\gamma \) spacetime. Phys. Rev. D 99, 044012 (2019). https://doi.org/10.1103/PhysRevD.99.044012
A. Allahyari, H. Firouzjahi, B. Mashhoon, Quasinormal modes of a black hole with quadrupole moment. Phys. Rev. D 99, 044005 (2019). https://doi.org/10.1103/PhysRevD.99.044005
A. Allahyari, H. Firouzjahi, B. Mashhoon, Quasinormal modes of generalized black holes: \(\delta \)-Kerr spacetime. Class. Quantum Gravity 37, 055006 (2020). https://doi.org/10.1088/1361-6382/ab6860/meta
H. Chakrabarty, D. Borah, A. Abdujabbarov, D. Malafarina, B. Ahmedov, Effects of gravitational lensing on neutrino oscillation in \(\gamma \)-spacetime. Eur. Phys. J. C 82, 24 (2022). https://doi.org/10.1140/epjc/s10052-021-09982-0
A. Hajibarat, B. Mirza, A. Azizallahi, \(\gamma \)-metrics in higher dimensions. Nucl. Phys. B. 978, 115739 (2022). https://www.sciencedirect.com/science/article/pii/S0550321322000906
S. Li, T. Mirzaev, A.A. Abdujabbarov, D. Malafarina, B. Ahmedov, W.-B. Han, Constraining the deformation of a rotating black hole mimicker from its shadow. Phys. Rev. D 106, 084041 (2022). https://doi.org/10.1103/PhysRevD.106.084041
H. Chakrabarty, Y. Tang, Constraining deviations from spherical symmetry using \(\gamma \)-metric. Phys. Rev. D 107, 084020 (2023). https://doi.org/10.1103/PhysRevD.107.084020
Y.F. Pirogov, Towards the rotating scalar-vacuum black holes, arXiv preprint arXiv:1306.4866 (2013)
I. Bogush, D. Gal’tsov, Generation of rotating solutions in Einstein-scalar gravity. Phys. Rev. D 102, 124006 (2020). https://doi.org/10.1103/PhysRevD.102.124006
T. Regge, J.A. Wheeler, Stability of a Schwarzschild singularity. Phys. Rev. 108, 1063 (1957). https://doi.org/10.1103/PhysRev.108.1063
T. Nakamura, K. Oohara, Y. Kojima, General relativistic collapse to black holes and gravitational waves from black holes. Prog. Theor. Phys. 90, 1 (1987). https://doi.org/10.1143/PTPS.90.1/1837872
K.D. Kokkotas, B.G. Schmidt, Quasi-normal modes of stars and black holes. Living Rev. Relativ. 2, 1 (1999). https://doi.org/10.12942/lrr-1999-2
H.-P. Nollert, Quasinormal modes: the characteristic sound of black holes and neutron stars. Class. Quantum Gravity 16, R159 (1999). https://doi.org/10.1088/0264-9381/16/12/201/meta
V. Ferrari, L. Gualtieri, Quasi-normal modes and gravitational wave astronomy. Gen. Relativ. Gravit. 40, 945 (2008). https://doi.org/10.1007/s10714-007-0585-1
E. Berti, V. Cardoso, A.O. Starinets, Quasinormal modes of black holes and black branes. Class. Quantum Gravity 26, 163001 (2009). https://doi.org/10.1088/0264-9381/26/16/163001/meta
R. Konoplya, A. Zhidenko, Quasinormal modes of black holes: from astrophysics to string theory. Rev. Mod. Phys. 83, 793 (2011). https://doi.org/10.1103/RevModPhys.83.793
A. Azizallahi, B. Mirza, A. Hajibarat, H. Anjomshoa, Three parameter metrics in the presence of a scalar field in four and higher dimensions (2023). arXiv:2307.09328 [gr-qc]
E.T. Newman, A. Janis, Note on the Kerr spinning-particle metric. J. Math. Phys. 6, 915 (1965). https://doi.org/10.1063/1.1704350
E.T. Newman, E. Couch, K. Chinnapared, A. Exton, A. Prakash, R. Torrence, Metric of a rotating, charged mass. J. Math. Phys. 6, 918 (1965). https://doi.org/10.1063/1.1704351?journalCode=jmp
A. Kamenshchik, P. Petriakova, Newman–Janis algorithm’s application to regular black hole models. Phys. Rev. D 107, 124020 (2023)
F.J. Ernst, New formulation of the axially symmetric gravitational field problem. Phys. Rev. 167, 1175 (1968). https://doi.org/10.1103/PhysRev.167.1175
F.J. Ernst, New formulation of the axially symmetric gravitational field problem. II. Phys. Rev. 168, 1415 (1968). https://doi.org/10.1103/PhysRev.168.1415
W. Kinnersley, Symmetries of the stationary Einstein–Maxwell field equations. I. J. Math. Phys. 18, 1529 (1977). https://doi.org/10.1063/1.523458
W. Kinnersley, D. Chitre, Symmetries of the stationary Einstein–Maxwell field equations. II. J. Math. Phys. 18, 1538 (1977). https://doi.org/10.1063/1.523459
W. Kinnersley, D. Chitre, Symmetries of the stationary Einstein–Maxwell field equations. III. J. Math. Phys. 19, 1926 (1978). https://doi.org/10.1063/1.523912
W. Kinnersley, D. Chitre, Symmetries of the stationary Einstein–Maxwell equations. IV. Transformations which preserve asymptotic flatness. J. Math. Phys. 19, 2037 (1978). https://doi.org/10.1063/1.523580
C. Hoenselaers, Symmetries of the stationary Einstein–Maxwell field equations. V. J. Math. Phys. 20, 2526 (1979). https://doi.org/10.1063/1.524057
C. Hoenselaers, W. Kinnersley, B.C. Xanthopoulos, Symmetries of the stationary Einstein–Maxwell equations. VI. Transformations which generate asymptotically flat spacetimes with arbitrary multipole moments. J. Math. Phys. 20, 2530 (1979). https://doi.org/10.1063/1.524058
S. Toktarbay, H. Quevedo, A stationary q-metric. Gravit. Cosmol. 20, 252 (2014). https://doi.org/10.1134/S0202289314040136
F. Frutos-Alfaro, M. Soffel, On relativistic multipole moments of stationary space-times. R. Soc. Open Sci. 5, 180640 (2018). https://doi.org/10.1098/rsos.180640
V. Ferrari, B. Mashhoon, Oscillations of a black hole. Phys. Rev. Lett. 52, 1361 (1984). https://doi.org/10.1103/PhysRevLett.52.1361
V. Ferrari, B. Mashhoon, New approach to the quasinormal modes of a black hole. Phys. Rev. D 30, 295 (1984). https://doi.org/10.1103/PhysRevD.30.295
B. Mashhoon, Stability of charged rotating black holes in the Eikonal approximation. Phys. Rev. D 31, 290 (1985). https://doi.org/10.1103/PhysRevD.31.290
W. de Sitter, Einstein’s theory of gravitation and its astronomical consequences. Mon. Not. R. Astron. Soc. 76, 699 (1916). https://adsabs.harvard.edu/full/1916MNRAS 76699D
J. Lense, H. Thirring, On the influence of the proper rotation of a central body on the motion of the planets and the moon, according to Einstein’s theory of gravitation. Z. Phys 19, 41 (1918). http://www.neo-classical-physics.info/uploads/3/0/6/5/3065888/lense_thirring_-_lense-thirring_effect.pdf
N. Straumann, General Relativity With Applications to Astrophysics? (Springer, 2004). https://doi.org/10.1007/978-3-662-11827-6
C. Chakraborty, P. Kocherlakota, M. Patil, S. Bhattacharyya, P.S. Joshi, A. Królak, Distinguishing Kerr naked singularities and black holes using the spin precession of a test gyro in strong gravitational fields. Phys. Rev. D 95, 084024 (2017). https://doi.org/10.1103/PhysRevD.95.084024
Acknowledgements
We would like to thank Yuri Pirogov and Oleg Zenin for useful comments. We acknowledge Isfahan University of Technology for the financial support that was made available to us.
Author information
Authors and Affiliations
Corresponding authors
Appendix
Appendix
The equations of motion using Eq. (2) and metric in Eq. (23) are as follows
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
Funded by SCOAP3. SCOAP3 supports the goals of the International Year of Basic Sciences for Sustainable Development.
About this article

Cite this article
Mirza, B., Kangazi, P.K. & Sadeghi, F. A class of rotating metrics in the presence of a scalar field. Eur. Phys. J. C 83, 1161 (2023). https://doi.org/10.1140/epjc/s10052-023-12255-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjc/s10052-023-12255-7