
Abstract
In this study, three conformable \((3+1)\)-dimensional fractional mKdV equations are explored via \(\exp (-\phi (\tau ))\) expansion method. A traveling wave transformation along with conformable derivative is used to transformed the nonlinear fractional differential equation into an ordinary differential equation. Then, the implementation of \(\exp (-\phi (\tau ))\) expansion method gives a variety of exact solutions of space-time fractional mKdV equations.
Similar content being viewed by others


1 Introduction
In the last century, the Korteweg-de Vries (KdV), Boussinesq, Benjamin–Bona–Mahony, Kadomtsev–Petviashvili, Nizhnik–Novikov–Veselov and Kaup-Newell equations are the well-known completely integrable equations that describe the propagation of shallow water [1,2,3,4,5]. A dynamic of shallow water waves in different places like sea beaches are depended by the KdV and Boussinesq equations [6, 7]. Also, the KdV equation has an effect in modeling blood pressure pulses. [8,9,10,11,12]. Besides, Wazwaz [13] presented the nonlinear modified KdV \((3+ 1)\)-dimensional equations and analyze their soliton, kink and periodic solutions. Particularly, Nuruddeen [14] has studied the exact solutions for the following three conformable space-time fractional mKdV equations of \((3+ 1)\)-dimension.
In recently, there are developed miscellaneous mathematical methods to solve nonlinear PDEs or fractional differential equations. Some of these methods are: The ansatz [15, 16], the modified simple equation [17, 18], the extended trial equation [19], the \(\left(\frac{G'}{G}\right)\)-expansion [20, 21], the sine-Gordon expansion [22, 23]. Additionally, some other work like a modified form of Kudryashov and functional variable methods [24,25,26] have been done by several scholars in [27, 28]. In [29,30,31,32,33,34], the auxiliary equation, the extended \(\tanh \)-function, the improved \(\tan \left( \frac{\phi (\eta )}{2}\right) \)-expansion method and the exp function methods have been investigated for difference and fractional order PDEs as well. Especially, the \(exp_{~a}\) function method [35,36,37] and the hyperbolic function method [38,39,40] both have been used to procure the exact solutions of nonlinear partial differential equations.
Among all above approaches, the \(\exp (-\phi (\tau ))\) technique has achieved substantial consideration due to its competency in inaugurating the exact solutions of nonlinear differential equations, see for instance, [41,42,43,44]. In fractional calculus, many definitions of fractional derivatives, Like Hilfer, Riemann–Liouville, Caputo form and so on, have been introduced in the literature but the well known product, quotient and the chain rules were the setbacks of one definition or another [45,46,47,48,49]. Therefore the most fascinating definition of fractional derivative with some of its properties are given in [50].
This paper aims to explore the conformable space-time fractional modified KdV equations of \((3+ 1)\)-dimensional for exact soliton type solutions via the \(\exp (-\phi (\tau ))\) approach using conformable derivative and the traveling wave transformation. The scheme of this paper is as follows: a brief description of the conformable derivative and the \(\exp (-\phi (\tau ))\) expansion approach is given in Sect. 2. Section 3, illustrate how to utilize this approach for producing new solutions with their graphs. The last parts summarized results and discussion of the current study.
2 Conformable fractional derivative approach
We recall the conformable derivative with some of its properties [50].
Definition 1
Suppose \(h:{\mathbb {R}}_{> 0}\rightarrow {\mathbb {R}} \) be a function. Then, for all \(t~>0\),
is known as \(\alpha , ~~0 <\alpha \le 1\) order conformable fractional derivative of p. The followings are some useful properties:
\(D^{\alpha }_t (a~p+b~g)=a D^{\alpha }_t(p)+b D^{\alpha }_t (g)\), for all \(a,~ b \in {\mathbb {R}}\)
\( D^{\alpha }_t(p~g)=p~D^{\alpha }_t(g)+g~D^{\alpha }_t(p)\).
Let \(p:{\mathbb {R}}_{> 0}\rightarrow {\mathbb {R}}\) be an \(\alpha \)-differentiable function, g be a differentiable function defined in the range of p.
On the top of that, the following rules hold.
\(D^{\alpha }_t(t^{h})=h~t^{h-\alpha }\), for all \(h\in {\mathbb {R}}\)
\(D^{\alpha }_t(\delta )=0\), where \(\delta \) is constant.
\(D^{\alpha }_t(p/g)=\frac{g D^{\alpha }_t(p)-p D^{\alpha }_t(g)}{g^{2}}\).
Conjointly, if p is differentiable, then \(D^{\alpha }_t(p(t))=t^{1-\alpha }\frac{d p(t)}{dt}\).
2.1 Demarcation of the \(\exp (-\phi (\tau ))\) method
The present subsection offers a transitory explanation of \(\exp (-\phi (\tau ))\) expansion approach [42, 44] in fabricating new exact solutions to nonlinear conformable space-time fractional modified KdV equations. Consider the following nonlinear conformable space-time fractional differential equation
With the use of transformation
Eq. (4) is changed into a nonlinear ODE as
We search a solution for Eq. (6) in the form
where N is calculated using the homogeneous balance principle (HBP) and \(\phi (\tau )\) is a function that satisfies a first-order equation as
Now, several cases can be taken:
Case 1: If \(\lambda _{1}^{2}-4\mu _{1}>0\) and \(\mu _{1} \ne 0\), then
Case 2: If \(\lambda _{1}^{2}-4\mu _{1}>0\) , \(\mu _{1}=0\) and \(\lambda _{1} \ne 0\), then
Case 3: If \(\lambda _{1}^{2}-4\mu _{1}<0\) and \(\mu _{1} \ne 0\), then
Case 4: If \(\lambda _{1}^{2}-4\mu _{1}=0\) , \(\mu _{1} \ne 0\) and \(\lambda _{1} \ne 0\), then
Case 5 If \(\lambda _{1}^{2}-4\mu _{1}=0\) , \(\mu _{1}=0\) and \(\lambda _{1}=0\), then
Now, by substituting Eq. (7) along with Eq. (8) into left hand side of Eq. (6), a polynomial in \(exp(-\phi (\tau ))\) is acquired. By setting each coefficient of this polynomial to zero, we acquire a nonlinear algebraic system whose solution gives a series of exact solutions for the Eq. (4).
3 Execution of the method
Firstly, we consider the space-time fractional mKdV equation (1).
3.1 Exact solutions of \((3+1)\)-dimensional conformable space-time fractional Eq. (1)
Using the transformation (5), and integrating once w.r.t. \(\tau \) with zero constant of integration, we get
The balance between \(V^{''}\) and \(V^3\) gives \(N=1\), then the nontrivial solution (7) reduces to:
By inserting the above solution in reduced equation Eq. (9) along with Eq. (8) and equating the coefficients of each \(\exp (-\phi (\tau ))\) to zero, we procure a set of nonlinear algebraic equations
and its solutions
yields the following new exact solutions:
If \(\lambda _{1}^{2}-4\mu _{1}>0\) and \(\mu _{1} \ne 0\), then
If \(\lambda _{1}^{2}-4\mu _{1}>0\), \(\mu _{1}=0\) and \(\lambda _{1} \ne 0\), then
where \(\tau = q \frac{ x^{\gamma }}{\gamma }+r \frac{ y^{\gamma }}{\gamma }+s \frac{ z^{\gamma }}{\gamma }+\frac{1}{2} \lambda _{1} ^2 q r s \frac{ t^{\gamma }}{\gamma }.\)
If \(\lambda _{1}^{2}-4\mu _{1}<0\) and \(\mu _{1} \ne 0\), then
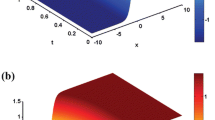
The obtained solutions of Eq. (1) are graphed here for different \(\gamma \)-values corresponding to \(q=\frac{2}{3}\), \(r=1\), \(s=3\) and \(\varepsilon =\frac{1}{2}\).

Solution profile of \(V_1\) appears in Eq. (12) taking \(\mu _{1}=-1\), \(\lambda _{1}=1=z\) and \(y=0\)

Solution profile of \(V_2\) appears in Eq. (13) taking \(\mu _{1}=0\), \(\lambda _{1}=1=z\) and \(y=0\)

Solution profile of \(V_3\) appears in Eq. (14) taking \(\mu _{1}=1\), \(\lambda _{1}=1=z\) and \(y=0\)
3.2 Exact solutions of \((3+1)\)-dimensional conformable space-time fractional Eq. (2)
The Eq. (2) can be transformed into an ordinary differential equation by using the transformation (5), and integrating once w.r.t. \(\tau \), we get
The balance between \(V^{''}\) and \(V^3\) gives \(N=1\), then the nontrivial solution (7) reduces to:
By inserting the above solution in reduced equation Eq. (15) along with Eq. (8) and equating the coefficients of each \(\exp (-\phi (\tau ))\) to zero, we procure a set of nonlinear algebraic equations
and its solutions
yields the following new exact solutions:
If \(\lambda _{1}^{2}-4\mu _{1}>0\) and \(\mu _{1} \ne 0\), then
If \(\lambda _{1}^{2}-4\mu _{1}>0\), \(\mu _{1}=0\) and \(\lambda _{1} \ne 0\), then
where \(\tau = q \frac{ x^{\gamma }}{\gamma }+r \frac{ y^{\gamma }}{\gamma }+s \frac{ z^{\gamma }}{\gamma }+\frac{1}{2} \lambda _{1} ^2 q r s \frac{ t^{\gamma }}{\gamma }.\)
If \(\lambda _{1}^{2}-4\mu _{1}<0\) and \(\mu _{1} \ne 0\), then
3.3 Exact solutions of \((3+1)\)-dimensional conformable space-time fractional Eq. (3)
The conformable space-time fractional mKdV equation (3), can be reduced into an ordinary differential equation as follows. Using the transformation (5), and integrating once w.r.t. \(\tau \) with zero constant of integration, we get
The balance between \(V^{''}\) and \(V^3\) gives \(N=1\), then the nontrivial solution (7) reduces to:
By inserting the above solution in reduced equation Eq. (21) along with Eq. (8) and equating the coefficients of each \(\exp (-\phi (\tau ))\) to zero, we procure a set of nonlinear algebraic equations
and its solution
yields the following new exact solutions:
If \(\lambda _{1}^{2}-4\mu _{1}>0\) and \(\mu _{1} \ne 0\), then
If \(\lambda _{1}^{2}-4\mu _{1}>0\), \(\mu _{1}=0\) and \(\lambda _{1} \ne 0\), then
where \(\tau = q \frac{ x^{\gamma }}{\gamma }+r \frac{ y^{\gamma }}{\gamma }+s \frac{ z^{\gamma }}{\gamma }+\frac{1}{2} \lambda _{1} ^2 q r s \frac{ t^{\gamma }}{\gamma }.\)
If \(\lambda _{1}^{2}-4\mu _{1}<0\) and \(\mu _{1} \ne 0\), then
The expansion idea given by Eq. (7) was also presented easier in a study on the KPP equation. The general solution to the reduced ordinary differential equations (9), (15) and (21) was also given in [51]. Actually, such travelling solutions should represent sample asymptotic to nonlinear integrable equations [52].
4 Results and discussion
Furthermore, for suitable parametric choices, we plotted three dimensional graphics of some solutions of the fractional mKDV equations for Figs. 1, 2 and 3. The obtained solutions are periodic wave, solitary wave and traveling wave solutions. It is more advantageous than other methods because different, various and more solutions are obtained with our methods. Note that our solutions are new and more extensive than the given ones in [13, 14]. When the parameters are given special values, the optical solitary waves are derived from the travelling waves.
5 Conclusion
In this study, three conformable fractional \((3+1)\)-dimensional mKdV equations have been explored via \(\exp (-\phi (\tau ))\) expansion method. A traveling wave transformation along with conformable derivative has used to transformed the nonlinear fractional differential equation into an ordinary differential equation. We plot some sketches for some of the analytical and exact solutions to express more physical properties of this model. Then, the implementation of \(\exp (-\phi (\tau ))\) expansion method procured a variety of exact solutions of aforementioned fractional mKdV equations. This method and the mathematical tool can be used to derive a localized wave solutions for different nonlinear models in engineering and mathematical physics.
References
Wadati M (1973) The modified korteweg-de vries equation. J Phys Soc Jpn 34(5):1289–1296
Ohkuma K, Wadati M (1983) The kadomtsev-petviashvili equation: the trace method and the soliton resonances. J Phys Soc Jpn 52(3):749–760
Ablowitz Mark J, Harvey S (1981) Solitons and the inverse scattering transform, vol 4. Siam, Philadelphia
Wazwaz A-M (2001) A computational approach to soliton solutions of the kadomtsev-petviashvili equation. Appl Math Comput 123(2):205–217
Wazwaz A-M (2004) New compactons, solitons and periodic solutions for nonlinear variants of the KdV and the KP equations. Chaos, Solitons Fractals 22(1):249–260
Korteweg DJ, de Vries G (1895) Xli. on the change of form of long waves advancing in a rectangular canal, and on a new type of long stationary waves. Lond Edinb Dublin Philos Mag J Sci 39(240):422–443
Yan Z, Zhang H (2001) New explicit solitary wave solutions and periodic wave solutions for Whitham-Broer-Kaup equation in shallow water. Phys Lett A 285(5):355–362
Schamel H (1973) A modified korteweg-de vries equation for ion acoustic wavess due to resonant electrons. J Plasma Phys 9(3):377–387
Wazwaz A-M (2004) Special types of the nonlinear dispersive Zakharov–Kuznetsov equation with compactons, solitons, and periodic solutions. Int J Comput Math 81(9):1107–1119
Wazwaz A-M (2008) New sets of solitary wave solutions to the KdV, mKdV, and the generalized KdV equations. Commun Nonlinear Sci Numer Simul 13(2):331–339
Biswas A (2009) Solitary wave solution for the generalized KdV equation with time-dependent damping and dispersion. Commun Nonlinear Sci Numer Simul 14(9):3503–3506
Mousavian SR, Jafari H, Khalique CM, Karimi SA (2011) New exact-analytical solutions for the mKdV equation. TJMCS 2(3):413–416
Wazwaz A-M (2017) Exact soliton and kink solutions for new (3+ 1)-dimensional nonlinear modified equations of wave propagation. Open Eng 7(1):169–174
Nuruddeen RI (2018) Multiple soliton solutions for the \((3+ 1)\) conformable space-time fractional modified Korteweg-de-Vries equations. J Ocean Eng Sci 3(1):11–18
Zhou Q, Mirzazadeh M, Zerrad E, Biswas A, Milivoj B (2016) Bright, dark, and singular solitons in optical fibers withspatio-temporal dispersion and spatially dependent coefficients. J Mod Opti 63(10):427–430
Hosseini K, Mayeli P, Ansari R (2018) Bright and singular soliton solutions of the conformable time-fractional Klein-Gordon equations with different nonlinearities. Waves Random Complex Media 28(3):426–434
Jawad AJAM, Petrovic MD, Biswas A (2010) A Modified simple equation method for nonlinear evolution equations. Appl Math Comput 217(2):869–877
Zayed EME, Ibrahim SH (2012) Exact solutions of nonlinear evolution equations in mathematical physics using the modified simple equation method. Chin Phys Lett 29(6):060201
Biswas A, Yildirim Y, Yaser E, Triki H, Alshomrani AS, Zakh Ullah M, Zhou Q, Moshokoa SP, Belic M (2018a) Optical soliton perturbation with full nonlinearity by trial equation method. Optik 157:1366–1375
Manafian J, Aghdaei MF, Khalilian M, Jeddi RS (2017) Application of the generalized \((\frac{G^{^{\prime }}}{G})\)-expansion method for nonlinear pdes to obtaining soliton wave solution. Opt Int J Light Electron Opt 135:395–406
Sahoo S, Saha Ray S (2016) Solitary wave solutions for time fractional third order modified KdV equation using two reliable techniques \((\frac{G^{^{\prime }}}{G})\)-expansion method and improved \( (\frac{G^{^{\prime }}}{G})\)-expansion method. Phys A 448:265–282
Kumar D, Hosseini K, Samadani F (2017) The sine- gordon expansion method to look for the traveling wave solutions of the tzitzéica type equations in nonlinear optics. Opt Int J Light Electron Opt 149:439–446
Hosseini K, Kumar D, Kaplan M, Bejarbaneh EY (2017) New exact traveling wave solutions of the unstable nonlinear schrödinger equations. Commun Theor Phys 68:761–767
Ayati Z, Hosseini K, Mirzazadeh M (2017) Application of Kudryashov and functional variable methods to the strain wave equation in microstructured solids. Nonlinear Eng 6:25–29
Hosseini K, Mayeli P, Kumar D (2018) New exact solutions of the coupled sine-Gordon equations in nonlinear optics using the modified Kudryashov method. J Mod Opt 65(3):361–364
Hosseini K, Samadani F, Kumar D, Faridi M (2018) New optical solitons of cubic-quartic nonlinear schrödinger equation. Optik 157:1101–1105
Apeanti WO, Lu D, Zhang H, Yaro D, Akuamoah SW (2019) Traveling wave solutions for complex nonlinear space-time fractional order (2 + 1)-dimensional maccari dynamical system and schrödinger equation with dual power law nonlinearity. SN Appl Sci 1:530
Yaro D, Seadawy A, Lu D, Apeanti WO, Akuamoah SW (2019) Dispersive wave solutions of the nonlinear fractional Zakhorov-Kuznetsov-Benjamin-bona-mahony equation and fractional symmetric regularized long wave equation. Results Phys 12:1971–1979
Bekir A (2008) Application of the extended tanh method for coupled nonlinear evolution equation. Commun Nonlinear Sci 13:1742–1751
Bekir A, Cevikel AC, Güner Ö, San S (2014) Bright and dark soliton solutions of the (2+1)-dimenssional evolution equation. Math Model Anal 19:118–126
Fan E (2000) Extended tanh-function method and its application to nonlinear equation. Phys Lett A 277:212–218
Wazwaz AM (2008) The extended tanh method for the Zakharov-Kuznestsov(ZK) equation, the modified ZK equation, and its generalized forms. Commun Nonlinear Sci 13:1039–1047
Hosseini K, Manafian J, Samadani F, Foroutan M, Mirzazadeh M, Zhou Q (2018) Resonant optical solitons with perturbation terms and fractional temporal evolution using improved \(tan(\phi (\eta )/2)\)-expansion method and exp function approach. Optik 158:933–939
Zhang S (2007) Application of exp-function to a KdV equation with variable-coefficients. Phys Lett A 365:448–453
Ali AT, Hassan ER (2010) General \(exp_a\) function method for nonlinear evolution equations. Appl Math Comput 217:451–459
Hosseini K, Ayati Z, Ansari R (2018) New exact solution of the tzitzéica type equations in nonlinear optics using the \(exp_a\) function method. J Mod Opt 65(7):847–851
Zayed EME, Al-Nowehy AG (2017) Generalized kudryashov method and general \(exp_{~a}\) function method for solving a high order nonlinear schrödinger equation. J Space Explor 6:1–26
Xie F, Yan Z, Zhang H (2001) Explicit and exact traveling wave solutions of whitham-broer-kaup shallow water equations. Phys Lett A 285(1):76–80
Bai C (2001) Exact solutions for nonlinear partial differential equation: a new approach. Phys Lett A 288(3):191–195
Hosseini K, Zabihi A, Samadani F, Ansari R (2018) New explicit exact solutions of the unstable nonlinear schrödinger’s equation using the \(exp_a\) and hyperbolic function methods. Opt Quant Electron 50(2):82
Hosseini K, Mayeli P, Ansari R (2018) Bright and singularsoliton solutions of the conformable time-fractional Klein–Gordonequations with different nonlinearities. Waves Random Complex Media 28(3):426–434
Taşcan F, Akbulut A (2017) Exact solutions of nonlinear partial differential equations with \(exp (-\phi (\epsilon ))\)- expansion method. Afyon Kocatepe Üniversitesi Fen ve Mühendislik Bilimleri Dergisi 17:86–92
Hosseini K, Bekir A, Ansari R (2017) Exact solutions of nonlinear conformable time-fractional boussinesq equations using the \(\exp (-\phi (\epsilon ))\)-expansion method. Opt Quant Electron 49(4):131
Hosseini K, Bekir A, Kaplan M, Güner Ö (2017) On a new technique for solving the nonlinear conformable time-fractional differential equations. Opt Quant Electron 49(11):343
Samko G, Kilbas AA, Marichev (1993) Fractional integrals and derivatives: theory and applications. Gordon and Breach, Yverdon
Jumarie G (2006) Modified riemann-liouville derivative and fractional taylor series of nondifferentiable functions further results. Comput Math Appl 51(9–10):1367–1376
Caputo M, Fabrizio M (2015) A new definition of fractional derivative without singular kernel. Prog Fract Differ Appl 1(2):73–85
Li Z-B (2010) An extended fractional complex transform. Int J Nonlinear Sci Numer Simul 11(Supplement):335–338
Chung WS (2015) Fractional newton mechanics with conformable fractional derivative. J Comput Appl Math 209:150–158
Khalil R, Al Horani M, Yousef A, Sababheh M (2014) A new defination of fractional derivative. J Comput Appl Math 264:65–70
Ma WX, Fuchssteiner B (1996) Explicit and exact solutions to a kolmogorov-petrovskii-piskunov equation. Int J Non-Linear Mech 31:329–338
Ma WX (2019) Long-time asymptotics of a three-component coupled mkdv system. Mathematics 7:573
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors involved in this manuscript declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zafar, A., Rezazadeh, H., Bekir, A. et al. Exact solutions of \((3+1)\)-dimensional fractional mKdV equations in conformable form via \(\exp (-\phi (\tau ))\) expansion method. SN Appl. Sci. 1, 1436 (2019). https://doi.org/10.1007/s42452-019-1424-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-019-1424-1