
Abstract
This work presents a novel sensitivity approach that quantifies sensitivity to regimes of a model’s state variables rather than constitutive model parameters. This Physical Regime Sensitivity (PRS) determines which regimes of a model’s independent variables have the biggest influence on an experiment or application. PRS analysis is demonstrated on a strength model used in the simulation of a copper Taylor cylinder. In a series of simulations, the strength model was perturbed sequentially in local regimes of plastic strain, plastic strain rate, temperature and pressure, and then the prediction of cylinder shape was compared to unperturbed calculations. Results show, for example, that the deformed length of the cylinder was most sensitive to strength at a strain rate of 1.0 × 104/sec., but the deformed footprint radius was most sensitive to strength at a strain rate of about 4.0 × 104/sec. Compared to current histogram approaches, PRS can be used to design or interpret integrated experiments by identifying not just which regimes are accessed somewhere in the experiment but the causality question of which regimes actually affect the measured data. PRS should allow one to focus experimental and modeling efforts where they are most needed and to better interpret experiments.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
As the research community increasingly turns to simulations to interpret or supplement the experimental knowledge base, we must strive to better understand the relationship between material behavior models, experiments, and applications. After all, models are meant to capture reality via the relevant physical mechanisms and processes. One commonly used tool for probing the simulation-experiment relationship is sensitivity analysis which gives the relative response of an output variable, like experimental measurements or system performance, to a perturbation in the input parameters [1,2,3]. In the material modeling community, the typical use of sensitivity analysis is to quantify a sensitivity to the parameters in a material behavior model. This approach provides a mechanism to understand the effect of errors in the fit of the model. However, parameter sensitivities provide no information about which regimes of the state variables are exercised since changes in the model parameters will typically modify the response curve over the full range of each state parameter.
In this paper, we present a novel sensitivity approach that uses simulations of an experiment to quantify sensitivity to regimes of a model’s state variables, rather than model parameters. Identifying the important regimes should allow one to focus experimental and modeling efforts where they are most needed and to better interpret experiments. We call this approach Physical Regime Sensitivity (PRS).
The concepts apply to any material behavior or property we might try to measure and model, for example conductivity, equation of state, fracture toughness, nuclear fission cross sections, chemical reaction rates, and so on. Such behaviors generally depend on one or more independent variables (sometimes also called state variables). For example, many behaviors depend on temperature among other independent variables. The independent variables should not be confused with the parameters of the material model which are typically perturbed in sensitivity analysis.
To clarify the presentation, this paper will use the example of simulation of an experimental test of material strength for the purpose of developing, calibrating, or validating a strength model. The term “strength” is sometimes used for different concepts. Here, by strength we mean resistance to deviatoric, i.e., shear, deformation. Strength is commonly exemplified by a material’s stress–strain curve where each point on the curve represents a strength, sometimes also called a flow stress, as the material evolves under loading. Commonly, strength models depend on the independent variables plastic strain, plastic strain rate, temperature, and pressure:
where s is used for strength to distinguish the material property of strength from the applied stress, which is often represented by σ. Equation 1 is usually called the constitutive or plasticity relation. Stress and strain are tensor quantities. In this paper, stress and the associated material property strength refer to the scalar tensor invariant of equivalent (also called von Mises) stress, and strain and strain rate always refers to the equivalent plastic strain.
Now we are ready to define PRS as the answer to a certain question: what is the sensitivity of an experiment or system to various regimes of one or more independent variables in a model? For example, how sensitive is a certain experiment to strength at a strain rate of 105/sec. compared to 106/sec.? Or what are the relatively sensitivities to strength at various temperatures? The word “at” in the previous sentences is key to understanding PRS – it specifies the regime.
Traditional sensitivity analysis investigates how the variation in the output of a numerical model can be attributed to variations of its input factors [4, 5]. Generally, the input factors are parameters in a model, for example the parameters in a strength or heat conduction or biomechanics model or others [6,7,8,9,10,11,12,13,14]. Since such parameters will change the model over the entire range of an independent variable, or at least a broad range, parameter-based sensitivity analysis cannot distinguish sensitivities within distinct regimes of the model.
Why Do We Need PRS?
We can consider two regimes for experiments. In accessible regimes of independent variables such as temperature or pressure, simple experiments can be used to directly determine the property of interest. Such data is commonly used to calibrate a model. For example, at low strain rates, a simple tension test can measure the stress–strain curve of a solid, which can be used to directly calibrate a strength model.
In less accessible regimes, more complicated experiments, sometimes called integrated experiments or validation experiments, are used. We define those as experiments in which the property of interest cannot be determined directly from the experimental data. One example is Rayleigh–Taylor experiments which are sensitive to strength, the property of interest, at extreme pressures and strain rates [15, 16]. There are a couple reasons why such experiments usually do not provide usable, quantified property estimates. First, multiple independent variables vary spatially and temporally during such experiments, so the property-variable relationship cannot be easily understood. In other words, these experiments operate over multiple regimes, but any estimate of the property of interest is only useful when coupled with distinct values for the independent variables. Second, the data is often taken at only discrete times and locations, and the measurement locations are often accessible locations like free surfaces rather than directly at the most relevant regions inside a sample. For these reasons, and absent a simple and accurate analytical description of the experiment, it can be difficult to quantify the desired property. As a result, integrated experiments are most often used to validate a model rather than to calibrate it, although sophisticated model calibration techniques such as Bayesian inferencing are possible in some cases [17, 18].
We propose PRS to improve the usefulness of integrated experiments used to study material behavior in regimes where simple experiments are not possible. First, PRS can quantify which regimes are most important to an application to a system or device. Then, PRS can be used to design or interpret integrated experiments by quantifying which regimes actually affect the measured data. Understanding this causality answers important questions: Is the experiment sensitive to the regimes you care about? Does the experiment isolate narrow regimes or are the regimes broad? Can you design an experiment to better focus on the most important regimes? Does your set of experiments cover the full regime you care about for your application?
In the literature, the most comparable method to PRS is not a sensitivity analysis but what has been called a histogram analysis [19,20,21,22]. Values of the independent variables are extracted at all locations and time steps in the simulations. They are binned and a scatter plot versus the independent variables is used to visualize which regimes are most exercised in the experiments. Such an approach does not capture causality. For example, variables from one region of the test specimen may have negligible effect when the measurement is taken elsewhere. Or variables from a region that does not deform would not be relevant for a strength model. Weighting by things like plastic strain increment can improve the ability of a histogram to identify the regimes of interest, but we propose PRS as a more explicit way to accurately capture the causality.
In this work, we present a general method for quantifying PRS for an experiment using simulations of that experiment. The method is applied to a Taylor cylinder, an integrated experiment that is sensitive to strength. We also examine how the regime sensitivity changes when different experimental observables are considered for the same experiment and qualitatively show how PRS gives distinct information from the histogram method. Finally, we discuss the implications of the results and the PRS methodology in general.
Methods
This section presents a methodology to quantify physical regime sensitivity on a dynamic, explicit finite element simulation of a copper Taylor cylinder. The Taylor cylinder experiment is described first along with the accompanying finite element model and copper strength model. The regime-sensitivity analysis implementation is then explained and applied to the Taylor cylinder.
Example: Copper Taylor Cylinder
A Taylor cylinder makes a good test case for physical regime sensitivity because it is known to be a sensitive validation test for strength modeling at high rates [23,24,25,26,27,28], but there is limited quantified understanding of which regimes of the strength model have the most effect on the experimental data. A Taylor cylinder is a solid rod of the test material that is dynamically impacted axially onto the flat surface of a rigid anvil. The impact plastically deforms and shortens the cylinder. The strain rate varies spatially throughout the test. This leads to large variations in accumulated plastic strain and the accompanying temperature rise from plastic work. The final shape of the cylinder is compared with predictions to assess the accuracy of a strength model. More recently, more sophisticated analyses have also included Taylor cylinder data in efforts to calibrate strength model parameters [29,30,31,32].
This work models a Taylor cylinder experiment on OFHC copper in the H03 temper, commonly referred to as ¾ hard. The experiment was performed at the Los Alamos National Laboratory Taylor cylinder facility [33], which uses a 7.62 mm smooth-bore launch tube and high-pressure helium-gas for propulsion. Lasers are used to align the rod to the barrel to limit tilt to less than a milliradian. The facility fires the cylinders into an evacuated thick-walled 304 stainless steel impact tank against a pneumatically positioned AF1410 high-strength steel anvil (ground to a mirror surface finish). The impact velocity of 177 m/s was selected to achieve plastic deformation along half the cylinder length, an estimate based on constitutive testing. The cylinder was initially 7.37 mm in diameter and 50.8 mm long. After testing, see Fig. 1, the deformed cylinder was 38.8 mm long, a decrease of 24%, and 13.62 mm in diameter at the impacted end of the cylinder, an increase of 85%. Shape measurements around the circumference of the recovered cylinder showed that the loading and deformation were axisymmetric to within a few percent.

The deformed copper Taylor cylinder after impact
The Taylor cylinder test was modeled using a fully Lagrangian analysis in the Abaqus Explicit commercial finite element code. The cylinder was modeled with a 12 × 80 mesh of 4-noded axisymmetric quadrilateral elements (CAX4R) for elements 0.31 mm in the radial direction and 0.64 mm in the axial direction. The unequal aspect ratio mesh allows the elements to maintain overall element quality as the mesh deforms. The anvil was modeled with an analytic rigid surface, and a frictionless contact surface was used between the cylinder and the anvil. The simulation was adiabatic with an initial cylinder temperature of 298 K. The cylinder was initialized at 177 m/s immediately prior to contact. In the simulation, the cylinder rebounds off the rigid surface after about 130 μs. Plastic strain effectively ceases to evolve at that point, but the simulation is run until 400 μs after impact to allow vibrations to damp out before extracting the shape. The cylinder is still vibrating elastically, but no effort was made to average the shape over a vibration period because the elastic deformations are relatively small. However, the elastic vibrations are a source of noise in the regime-sensitivity results.
The ¾-hard copper constitutive behavior, i.e., strength, was modeled using a Preston-Tonks-Wallace (PTW) model [34]. The PTW model was calibrated using quasi static and Hopkinson bar stress–strain curves taken at strain rates from 0.001/sec. to 2500/sec. and temperatures from 77 to 573 K. Examples of stress–strain curves from the model are shown in the next section. The BGP form of the shear modulus is used [35]. Pressure effects on strength in the PTW model appear through changes in the shear modulus as a function of density [34]. Over the modest range of pressure for the Taylor cylinder, the effect can be well approximated as scaling the strength by (1 + P*0.0244/GPa). Because the pressures are modest and shown later to be localized, short transients, the pressure strengthening effect has insignificant effect on predicting the final cylinder shape. Nonetheless, the effect is included for completeness. The parameters for the PTW and shear modulus models are given in Table 1, and the reader is referred to [34] for the PTW equations.
Figure 2 shows that the calibrated PTW strength model matches the final shape of the copper Taylor cylinder well. Figure 2 also shows that the plastic strain peaks at a bit over 200% locally at the bottom of the cylinder.

The deformed finite element model matches the measured shape of the recovered Taylor cylinder. The peak plastic strains in the model exceed 200%. Marked axial positions will be used in the sensitivity analysis
This study looks at the sensitivity of individual points from the final shape for the cylinder. First, we look at the final deformed length of the cylinder, and next we look at the radius at the bottom of the cylinder, also known as the footprint. Both are common metrics for comparing simulations to measured data. Finally, we look at the radius at other axial locations along the cylinder to understand some interesting results for the regime sensitivities for the footprint.
Regime Sensitivity Analysis
This section describes how physical regime sensitivity analysis was implemented using a series of simulations. In each simulation, the strength model is perturbed in the neighborhood of a fixed value of one of the independent variables. This perturbation defines the regime in which the simulation measures sensitivity. The experimental measurable is extracted from the simulation and compared to a simulation with unperturbed strength to establish sensitivity to strength in that regime of the independent variable value.
The local strength perturbations can be implemented using built-in capabilities of Abaqus. A strength model of the form of Eq. 1 can be input as a multi-dimensional spline fit. In Abaqus, that is achieved by inputting a table of strength values as a function of the independent variables. The strength values act as the spline knots. Strength is interpolated from the table using linear interpolation for all variables except strain rate, which is interpolated logarithmically. Since pressure is not automatically available for this tabular look up in Abaqus, it can be included as a user defined field (vusdfld). Finally, the strength can be perturbed by changing the table values for all strengths at a given value of whichever independent variable is being studied.
For this application, the baseline (unperturbed) tables were constructed by evaluating the PTW model for ¾ hard copper over a range of state variables encompassing all the conditions experienced during the simulation.
Figure 3 shows some typical stress–strain curves from the tabularized PTW model for ¾ hard copper and an example perturbation. The curves are shown for two temperatures and multiple strain rates. The points on the curves are the values from the spline table. An example for strength perturbed at a strain rate of 103/sec. is shown. The stress–strain curves at 103/sec. are perturbed by 2% for all strains, temperatures (shown for two) and pressures (not shown).

The stress–strain curves at zero pressure for copper shown for several strain rates and two temperatures. For a regime-sensitivity calculation strength at the strain rate of 103/sec., the stress–strain curves at 103/sec. are perturbed for all temperatures (shown for two) and pressures (not shown)
Choosing the knot spacing (table density) involves a tradeoff between resolution and magnitude of the sensitivity results. Figure 4 shows, for example, that perturbing strength at a strain of 0.5 when the knots are at 0.1 increments perturbs the strength between strains of 0.4 and 0.6. This range defines the physical regime. The area under the tent-like perturbation of strength is a measure of the total magnitude of the perturbation. Decreasing the knot spacing below 0.1 strain could better resolve the sensitivity regime but would make for a smaller magnitude perturbation that might make the effect on the simulated data harder to distinguish from numerical noise. The magnitude of perturbation at the knot, the peak of the tent, can be increased. However, an overly large perturbation might change the shape of the stress–strain curve enough to have non-physical effects on the simulation results. For the calculation in this study, the tradeoff was determined heuristically, and the spacing is reported along with the results.

For a regime-sensitivity calculation on strength at a strain of 0.5 the strength at that strain is perturbed at all strain rates (four shown), temperatures (two shown), and pressures (not shown)
Python scripting is used to automate the regime-sensitivity study. The scripts build the baseline and perturbed strength model tables, which are included in the Abaqus finite element simulation of the Taylor cylinder. Simulations using each table are automatically submitted for analysis sequentially or in batches. After completion, the final shape of the Taylor cylinder is extracted from each run. The Supplementary Information contains a set of example python scripts for these Taylor cylinder simulations to generate and run all necessary Abaqus files, extract the results, and plot regime-sensitivity curves.
The sensitivity metric compares the change in a dimension after perturbing the strength to the value with the baseline, unperturbed strength model:
where l is the final length of the rod and r is the final radius at the bottom (z0 = 0) of the rod. A zero value for the sensitivity would indicate no sensitivity to strength in that regime of the independent variable. A positive sensitivity value would indicate that increasing the strength increases that dimension and a negative value would decrease it.
For the Taylor cylinder study, we used a perturbation magnitude of 5%. Strengths were tabulated at strains from 0 to 2.5 in increments of 0.1, strain rates from 102/sec. to 106/sec. with the exponent incremented by 0.2, temperatures from 198 to 648 K in increments of 25 K, and pressures from -0.5 GPa, where negative means tension, to 1.0 GPa in increments of 0.1 GPa. The 5% perturbation magnitude and table spacings were determined heuristically to provide a balance between sensitivity and resolution, with the perturbation magnitude being set to the minimum level that provided good signal-to-noise in the regime-sensitivity curves. This discretization of the independent variables leads to 101 independent simulations. In each simulation, the table was coarsened for the unperturbed independent variables to reduce computation time.
Results and Discussion
Interpretation
Figure 5 shows physical regime sensitivities for the copper Taylor cylinder. The magnitudes of the changes to length and radius are about 1% or less, which support the tacit assumption that the 5% magnitude perturbations have not triggered local instabilities or other non-physical behavior. Other than that, we attach no physical interpretation to the absolute magnitudes of the regime sensitivities. The sensitivity depends on both the magnitude of the perturbation and the width of the tent-like perturbed region, e.g., Fig. 4. Unless there is a meaningful way to compare perturbation magnitudes for different variables like temperature and pressure, comparing sensitivity magnitudes between variables holds little meaning. However, comparing the relative sensitivities between different measured quantitates for the same perturbed variable is informative.

Physical regime sensitivities for the copper Taylor cylinder show simple behavior when the measurement is the final cylinder length and more subtle behavior for the footprint radius
First, look at the regime sensitivity of the total cylinder length, one common metric for comparing Taylor cylinder simulations to experiments. The sensitivities all have a positive sign. An increase in strength generally causes less deformation, leaving a longer cylinder and thus giving a positive sensitivity. The length sensitivities are uniformly positive because the total length is a metric that is affected by the entire cylinder and acts as a global measure of behavior.
The strain-regime sensitivity of the length peaks at low strains because all the material that deforms plastically passes through zero plastic strain. At higher strains, less total material is affected. The peak occurs at 0.1 instead of 0 because the tent-like perturbation in the strength (see Fig. 4) is only half width for a strain of 0. For other variables, we avoid that issue by making sure the range extends beyond the variable values exercised in the simulation, but plastic strains below zero have no meaning. The length sensitivity decays to insignificant values by 100% strain, even though Fig. 2 shows that the local peak plastic strain exceeds 200%. The region seeing plastic strains greater than 100% has no significant effect on the total cylinder length because it is fairly small and sees the highest strains for only a short duration.
The strain-rate-regime sensitivity of the length peaks at 104/sec. and is a broad sensitivity peak covering ± one decade in strain rate. Of course, the location of that sensitivity peak will depend on the impact velocity. The temperature-regime sensitivity of the length has its peak at the initial value of room temperature and then decreases because less material is affected as the temperature increases. Temperature increases are caused by plastic work, which is the integrated area under the stress–strain curve. That makes the final temperature distribution, see Fig. 6, very similar to the plastic strain distribution in Fig. 2 and the temperature-regime sensitivity curves very similar to the strain-regime sensitivity curves.

The final temperature distribution in the Taylor cylinder. Note the similarity to the plastic strain distribution in Fig. 2 since the temperature rise comes from plastic work
The pressure-regime sensitivity peaks between 0.1 and 0.2 GPa with less sensitivity outside that range. Those pressures are lower than the copper strength in Fig. 3, indicating no sensitivity to anything that might be considered high-pressure strength. Copper at 177 m/s on hardened steel gives a Hugoniot pressure of about 3 GPa, which decays rapidly away from the impact end because of release waves off the cylinder outer surface, a free surface which cannot support radial stress. A preliminary PRS study out to higher pressures with coarser spacing showed no significant sensitivities above 1 GPa pressure. An examination of the simulation results showed that after about 9 μs after impact the pressure never exceeds 1 GPa, and from about 6 μs after impact, the pressure wave exceeding 1 GPa is elastic and thus unaffected by strength. Since the cylinder continues to plastically deform until about 130 μs after impact, these localized high-pressure transients are quite short in duration. Thus, no sensitivity was detected in the preliminary higher pressure PRS analysis, and the final study shown in Fig. 5 was focused to give better resolution in the region of interest.
The regime sensitivities for the footprint radius behave significantly differently than those of the cylinder length. Because an increase in strength causes less deformation, which would tend to reduce the radius, a negative sensitivity might be expected. Instead, Fig. 5 shows that all the sensitivities have positive and negative regions.
The strain-regime sensitivity of the footprint radius in Fig. 5 starts out positive for strains up to about 0.25. So, increasing the strength in that early part of the stress–strain curve actually causes the bottom of the cylinder to deform more. Increasing the strength for strains above 0.25 has the more intuitive effect of decreasing the deformation at the bottom of the cylinder.
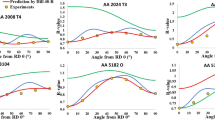
To better understand the positive sensitivities, additional calculations were performed. Sensitivities were calculated for final cylinder radii at multiple locations along the length of the cylinder, see Fig. 2 for those locations. Initial sensitivity plots were noisy because some locations along the cylinder length are more affected by elastic vibrations of the cylinder. Repeating the calculations with the perturbation magnitudes increased from 5% to 20% improved the signal to noise on those results. Observe that the resulting sensitivity curves in Fig. 7 approximately show a corresponding four-fold increase in the sensitivity magnitudes compared to the strain-regime sensitivity curve in Fig. 5.

The strain-regime sensitivity changes significantly along the length of the cylinder starting at the footprint z0/l0 = 0.0. For each curve, the maximum positive sensitivity is identified with an open symbol
Figure 7 shows that the regime-sensitivity curves change significantly along the length of the cylinder. At z0/l0 = 0.25, the sensitivity at zero strain is slightly negative and becomes more negative at increasing strains. It becomes mildly positive again at a strain of about 0.6. By z0/l0 = 0.5 the sensitivity is strongly negative at low strains but still has a significant positive peak at 0.4 strain. Farther along the cylinder, the shape of the curve does not change, but the sensitivities decrease in magnitude because there is simply less plastic strain.
The sensitivities from Fig. 7 are replotted versus cylinder position in Fig. 8 for fixed values of strain. Considering these regime sensitivities as a whole rather than the individual perturbations lets us hypothesize on how changing the baseline (unperturbed) strength model in different portions of the stress strain curve would shift some deformation from one region of the cylinder to another. To be clear, we are using the local perturbation sensitivities to predict the effect of more broad changes to the strength model. The curve for perturbing the initial yield stress, strain = 0.0, shows negative sensitivity indicating less deformation for central region of the cylinder, from z0/l0 = 0.3 to 0.8. The deformation is shifted to the bottom of the cylinder as indicated by the positive sensitivity at z0/l0 = 0.0. By contrast, perturbing the strength at a strain of 0.6 shifts deformation from the bottom of cylinder back towards the central region. The shifting of deformation regions as compared to a wholesale decrease in deformation can be explained. The initial kinetic energy of the cylinder, which is a fixed value, is mostly absorbed by the plastic work of deformation. Therefore, increasing the strength in only a small regime can only slightly reduce the total deformation. It is easier to move the deformation to other areas of the cylinder. Plastic deformation is favored where the increment in total hardening is lowest, because that is the easiest place to deform. By total hardening, we mean the increase in strength over some increment in time. Thus, since both strain and temperature are evolving, the incremental hardening rate is mostly a competition between strain hardening, as shown in the isothermal stress–strain curves in Fig. 3, and thermal softening. Increasing the strength model only at larger strains mean that the hardening increment is only increased near the bottom of the cylinder, which is the only region that sees the larger strains. Thus, deformation is favored further along the cylinder. A broader way to interpret the overall result from Fig. 7 and Fig. 8 is that the final shape of the cylinder is quite sensitive to the strain hardening slope, dσ/dε, and by implication the thermal softening slope, dσ/dT, in the constitutive model.

Perturbing the strength in a narrow regime of strain moves the deformation from one region of the cylinder to other regions
The other regime sensitivities in Fig. 5 for the footprint radius show similar behavior to strain-regime sensitivity, with positive and negative regions. The temperature-regime sensitivity is qualitatively very similar to strain-regime sensitivity, as was the case for cylinder length, because the temperature comes from the plastic work and is therefore highly correlated to strain. The strain-rate-regime sensitivity is predominately negative, especially at the higher rates. The strain-rate-regime sensitivity peaks at about 104.6/sec., or 4.0 × 104/sec., higher than for the cylinder length. The peak strain rate diminishes as the pressure wave decays along the length of the cylinder. Hence, only the bottom of the cylinder is affected by strength at the highest rates. There are positive sensitivities at rates between 103/sec. and 104/sec. The bottom of the cylinder spends very little time deforming between those rates as compared to further along the cylinder. Increasing strengths between those rates seems to resist and delay plastic deformation farther along the cylinder, keeping more of the energy near the bottom and increasing deformation there.
The lone positive point for pressure-regime sensitivity of the footprint radius in Fig. 5 raises the concern that the result may indicate noise in the curve or some error in the calculation. A second set of PRS calculations was performed with the pressure values in the tables offset in order to fill in points between. The new results in Fig. 9 nicely interpolate between the previous points, giving confidence that the results reflect a physical trend. The results do show a little bit of noise in the footprint sensitivity curve, which was found to come from elastic vibrations there. Although not particularly troublesome, the signal-to-noise in the curve could probably be improved by either increasing the perturbation magnitude or averaging the radius over a vibration cycle as compared to taking it at a fixed time.

An additional set of calculations that filled in points from Fig. 5 increased confidence that the lone positive point for the footprint sensitivity is part of a trend and not an erroneous result. The peak in length sensitivity is also better resolved
Now that we have more confidence in the curve, observe that the pressure-regime sensitivity for the footprint has an unusual shape with a narrow positive region surrounded by two negative regions. The negative regions follow the expected general behavior that an increase in strength reduces deformation. To understand the positive region, the simulation output was carefully examined during the time when the footprint is deforming. A section of the cylinder covering from 6 to 14 mm from the bottom spent most of the time in the pressure regime near 0.2 GPa. No other region spent significant time in this regime. Like the positive sensitivity regions for strain rate, increasing the strength farther along the cylinder seems to keep more of the energy near the bottom and increase the footprint radius.
Overall, the radius and length sensitivities provide contrasting examples of how PRS might aid using experiments like the Taylor cylinder. The length has sensitivities all with the same sign and with single-mode sensitivity peaks, which makes interpretation straightforward. In fact, if one estimates the average strength for the Taylor cylinder experiment based on the equivalent constant yield strength needed to match the final deformed length [36], one might associate that strength value with the peak sensitivity locations in Fig. 5 i.e. a discrete point in the form of Eq. 1, and use the value for model calibration rather than validation. Such a calibration point could be used along with the usual calibration data, quasi static and Hopkinson bar, to extend the calibration range to higher strain rates. Further work would be required to confirm the validity of such an approach. In contrast to length, the radius sensitivities change sign and have multiple peaks, which argue for their use as validation data only. However, the sensitivities can help interpret the model-data comparisons much better than simple yes or no assessments of the validation. For example, say the predicted Taylor cylinder shape was too narrow near z0/l0 = 0.5 and too wide at the footprint. One possible fix to the strength model, based on Fig. 8, would be to increase the strain hardening such that the strength was increased for strains greater than say 40% relative to the strength at lower strains. Such an interpretation should be used with caution since Fig. 5 indicates that the explanation is not unique: the shape might also be changed by changing the strength dependency with temperature or other variables instead of strain. Or, instead of adjusting the strength model based on the Taylor cylinder results, one might look for other experiments that could further inform the strength model in the most sensitive regimes.
Comparison with Histogram Method
Histograms were constructed following the procedure from [20]. Data was extracted from Abaqus at every timestep. The data was filtered to only include points which were undergoing plastic straining. Finally, a two-dimensional histogram is formed weighting by the equivalent plastic strain rate since that is proportional to the plastic work done in the region of interest. The histogram density is given in counts × strain rate in /sec and used to color plot. The size of the data point corresponds to the histogram bin size. For the figures presented herein, we use 500 bins for each variable.
The Fig. 10 histogram shows the strain rate and strain conditions visited by the Taylor rod. The figure is comparable to, but higher resolution than, Fig. 1 in [20] and shows similar features. Broadly speaking, the conditions visited correlate well with the sensitivity regimes for the strain and strain-rate-regime sensitivities in Fig. 5. The highest density regions in Fig. 10 imply that the experiment is dominated by strain rates between 103/sec and 104/sec. Figure 5 shows that the final length of the cylinder is most sensitive to strength at 104/sec ± one decade in strain rate, so a little higher than the histogram seems to indicate, and the footprint radius is most sensitive to even higher strain rates, mostly from about 104/sec to 105/sec. The difference occurs because not all locations and times have the same effect on a given result, but that is what the histogram method tacitly assumes. The histogram analysis also does not reveal the different sensitivities to different measurements, which can be important for both specifying experimental diagnostics to best get the maximum information from experiments and for interpreting the results. Furthermore, the histogram analysis does not reveal the sign of the sensitivities, which again can be critical for interpreting the inaccuracies in model predictions.

A histogram analysis of the Taylor cylinder simulation shows comparable regimes to the PRS analysis in Fig. 5, but does not distinguish which regimes differently affect different measurements or the sign of the sensitivities
A histogram precisely following the recipe used in [20] is shown in Fig. 11, where the simulation was sampled only every 10 time steps.Footnote 1 This histogram failed to capture even the presence of strain rates over 105/sec, whereas the PRS analysis showed actual sensitivities in that regime in spite of the modest presence of material that sees such high rates. This discrepancy illustrates that the histogram analysis must be applied with great care in order to capture important effects from even short transients. Unfortunately, building a histogram from a compete sampling of all computational elements at all time steps can be computationally intensive to a degree similar to a full PRS analysis.

A histogram made with a reduced sampling rate from the simulation, as is common, missed some important features that occurred during fast transients
A histogram analysis provides a correlation between any two variables, which is not given by PRS. For example, when interpreting Fig. 5, we speculated that plastic strain and temperature were highly correlated. The histogram in Fig. 12 shows just how strongly the two variables are correlated. As another example, Fig. 10 shows that in the highest density region the strain rate increases from about 103/sec to almost 104/sec as the plastic strain increase to about 10%, then increases slightly until falling off again as the strain approaches 15%. The slightly different histogram approach in [19] used three axes to simultaneously communicate the correlations between strain, strain rate, and pressure.

A histogram analysis shows just how strongly temperature is correlated with plastic strain in the Taylor cylinder
Overall, histogram and PRS analyses provide information that is somewhat overlapping but largely complementary, and they could be both applied to an experiment for a more complete understanding. The histogram analysis could be used to set the range for the PRS study. The histogram analysis, however, does not answer the specific questioned posed in the Introduction that motivated the development of PRS, notably missing the details of which regimes actually cause changes in observables.
Methodology
The implementation of PRS using a tabular, multivariate strength model in a commercial finite-element code was chosen as the simplest way to demonstrate the potential of PRS analysis. Some improvements are being made for future work. Instead of using tables, an analytical perturbation on an analytical strength model will be more flexible. For example, the perturbation could be a Gaussian function rather than the triangular region as shown in Fig. 4. The width of that Gaussian would be controlled analytically rather than by table spacing. The analytical perturbation will also allow a more careful study of the numerical behavior and convergence of the analyses. Therefore, study of those issues will be covered in future work. However, such an approach requires access to source code, so the tabular implementation might still be useful for casual users.
The regime-sensitivity curves in Fig. 5 could benefit from increased resolution, especially near the peaks, as illustrated to some extent in Fig. 9. Such refinement of the spacing between perturbation values would require finer spacing of the tables. In Abaqus, significantly increasing the number of points in the table can drastically increase the computational time in the pre-processor, when Abaqus re-interpolates the table to a scheme it deems appropriate, especially for the example case here which is a four-dimensional interpolation. A compromise could be achieved for the Taylor rod by leaving pressure-regime sensitivity out of the table altogether since that sensitivity is not very informative. No equivalent computational slowdown should occur with the analytical implementation. Thus, the issue of sufficient regime resolution will be studied with the analytical implementation. Additional numerical issues will be studied such as the effects of the height and width of the perturbations, selecting those values, and convergence with mesh refinement.
Although demonstrated here with a qualitative interpretation, PRS is in principle also compatible with quantitative statistical methods that are applied to traditional sensitivity analysis. This can be illustrated in conjunction with a new modeling approach recently applied to an equation of state (EOS), P(ρ), for high explosives [37]. Their parametric EOS model, rather than being based on a physical equation, used a large set of compact basis functions that were each only defined in a local ρ regime to define a more empirical equation. Thus, the parameter sensitivity was effectively a regime sensitivity. They used the Fisher information matrix [38] to show quantitatively how useful a proposed experiment would be in constraining a physics model in a regime of interest. That work was the simpler example of a univariate model as compared to the multivariate strength model studied in this work. However, it brings up the point that applying traditional methods to PRS could bring statistical rigor to the interpretation.
Applications
The Introduction hypothesized that PRS could be used a priori to help design experiments to target some regime, but this paper only demonstrated a posterior application using a strength model that was shown to match the experiment. If one wanted to design an experiment to target a different regime, one might use PRS to evaluate an entirely new experiment concept or run PRS for variations on an existing experiment like changing the velocity or radius of the Taylor cylinder. Using PRS to design an experiment in uncharted regimes would undoubtedly lose some accuracy when the behavior model (strength in this case) is extrapolated to untested regimes. Such is the nature of designing exploratory experiments, and PRS could still help improve the chances of achieving experimental sensitivity in the target regimes, especially if one could try model variations that span the expected range of possible strengths.
Most experiments that probe dynamic strength in extreme conditions, say pressures greater than 10 GPa or strain rates greater than 104/sec [39], fall under our definition of integrated experiments from the Introduction and require modeling to assess the strength. Such experiments could benefit from PRS to quantify the regimes of sensitivity. Examples beyond the Taylor rod examined here include Rayleigh–Taylor instabilities [15, 16, 40,41,42,43], Richtmyer–Meshkov instabilities [44,45,46,47,48,49,50], dynamic tensile extrusions [51, 52], dynamic hole closure [20, 53],and others [54,55,56]. A few other techniques give quantified estimates of strength in extremes along with some estimate of the effective regime for one or more state variables, e.g., [57,58,59,60], but a PRS analysis could be very helpful to check the simplifying assumptions used in the analyses and give a complete picture of the regime sensitivity. Those are just experiments to measure dynamic strength. If one considers other behaviors in physics and engineering besides strength, and then also applications not just property measurements, the possible applications of PRS are large.
Conclusions and Future Work
Physical Regime Sensitivity analysis provides a unique way of quantifying the sensitivity of an experiment to a material behavior model by avoiding the confounding effects of parameters on sensitivity to get at a deeper physical understanding. Specifically, a series of simulation identifies the regimes of the independent variables of the material model that contribute the most sensitivity to a quantity measured in the experiment. PRS can be used to design or interpret integrated experiments by identifying not just which regimes are accessed somewhere in the experiment, but also which regimes actually affect the measured data. For the copper Taylor cylinder example, the deformed length of the cylinder was most sensitive to strength at a strain rate of 1.0 × 104/sec., at room temperature, and at strains below about 50%. The deformed footprint radius was by contrast most sensitive to strength at a strain rate of about 4.0 × 104/sec and strains up to 100% or more. The regime sensitivities of the footprint radius showed more complicated behavior because that radius is a more local measure of deformation than cylinder length. Increasing the strength in some narrow regime tends to move deformation from one area of the cylinder to another more than uniformly reducing deformation.
PRS can be an important link between the modeling application of interest and the small- and intermediate-scale integrated experiments used to access regimes where material modeling is challenging. PRS analysis of the end application establishes which physical regimes for which material behavior models affect performance. PRS analysis of the experiments establishes which experiments successfully interrogate important regimes of important behaviors and which regimes are not covered by existing experiments. Identifying the important regimes should allow one to focus experimental and modeling efforts where they are most needed and to better interpret experiments.
Some improvements are being made for future work. Instead of using tables, an analytical perturbation on an analytical strength model will be more flexible. For example, the perturbation could be a Gaussian function rather than the triangular region as shown in Fig. 4. The width of that Gaussian would be controlled analytically rather than by table spacing. The analytical perturbation will also allow a more careful study of the numerical behavior and convergence of the analyses.
Notes
Private communication with Nathan Barton, since this detail was not given in the paper.
References
Saltelli A, Ratto M, Andres T, Campolongo F, Cariboni J, Gatelli D, Saisana M, Tarantola S (2008) Global sensitivity analysis: the primer. Wiley, New York. https://doi.org/10.1002/9780470725184
Cukier RI, Levine HB, Shuler KE (1978) Nonlinear sensitivity analysis of multiparameter model systems. J Comput Phys 26(1):1–42. https://doi.org/10.1016/0021-9991(78)90097-9
Wang Z, Ghanem R (2022) A functional global sensitivity measure and efficient reliability sensitivity analysis with respect to statistical parameters. Comput Methods Appl Mech Eng. https://doi.org/10.1016/j.cma.2022.115175
Pianosi F, Beven K, Freer J, Hall JW, Rougier J, Stephenson DB, Wagener T (2016) Sensitivity analysis of environmental models: a systematic review with practical workflow. Environ Model Softw 79:214–232. https://doi.org/10.1016/j.envsoft.2016.02.008
Borgonovo E, Plischke E (2016) Sensitivity analysis: a review of recent advances. Eur J Oper Res 248(3):869–887. https://doi.org/10.1016/j.ejor.2015.06.032
Gu Q, Conte JP, Elgamal A, Yang Z (2009) Finite element response sensitivity analysis of multi-yield-surface J2 plasticity model by direct differentiation method. Comput Methods Appl Mech Eng 198(30):2272–2285. https://doi.org/10.1016/j.cma.2009.02.030
Tang K, Congedo PM, Abgrall R (2016) Adaptive surrogate modeling by ANOVA and sparse polynomial dimensional decomposition for global sensitivity analysis in fluid simulation. J Comput Phys 314:557–589. https://doi.org/10.1016/j.jcp.2016.03.026
Kleiber M, Kowalczyk P (1996) Sensitivity analysis in plane stress elasto-plasticity and elasto-viscoplasticity. Comput Methods Appl Mech Eng 137(3):395–409. https://doi.org/10.1016/S0045-7825(96)01072-9
Dowding KJ, Blackwell BF (2000) Sensitivity analysis for nonlinear heat conduction. J Heat Transfer 123(1):1–10. https://doi.org/10.1115/1.1332780
Fairbanks HR, Jofre L, Geraci G, Iaccarino G, Doostan A (2020) Bi-fidelity approximation for uncertainty quantification and sensitivity analysis of irradiated particle-laden turbulence. J Comput Phys 402:108996. https://doi.org/10.1016/j.jcp.2019.108996
Zhang Y, Der Kiureghian A (1993) Dynamic response sensitivity of inelastic structures. Comput Methods Appl Mech Eng 108(1):23–36. https://doi.org/10.1016/0045-7825(93)90151-M
Weisz-Patrault D, Francart C, Seisson G (2021) Uncertainty estimation and Hierarchical Bayesian analysis of mechanical dynamic tests. J Dyn Behav Mater 7(3):447–468. https://doi.org/10.1007/s40870-020-00280-6
Levrero-Florencio F, Margara F, Zacur E, Bueno-Orovio A, Wang ZJ, Santiago A, Aguado-Sierra J, Houzeaux G, Grau V, Kay D, Vázquez M, Ruiz-Baier R, Rodriguez B (2020) Sensitivity analysis of a strongly-coupled human-based electromechanical cardiac model: effect of mechanical parameters on physiologically relevant biomarkers. Comput Methods Appl Mech Eng 361:112762. https://doi.org/10.1016/j.cma.2019.112762
Blonigan PJ (2017) Adjoint sensitivity analysis of chaotic dynamical systems with non-intrusive least squares shadowing. J Comput Phys 348:803–826. https://doi.org/10.1016/j.jcp.2017.08.002
Remington B, Rudd R, Barton N, Cavallo R, Park H-S, Belof JL, Comley A, Maddox B, May M, Pollaine S (2012) Interpretation of laser-driven V and Ta Rayleigh–Taylor strength experiments. AIP Conf Proc. https://doi.org/10.1063/1.3686537
Frahan MTHF, Belof JL, Cavallo RM, Raevsky VA, Ignatova ON, Lebedev A, Ancheta DS, El-dasher BS, Florando JN, Gallegos GF, Johnsen E, LeBlanc MM (2015) Experimental and numerical investigations of beryllium strength models using the Rayleigh–Taylor instability. J Appl Phys 117(22):225901. https://doi.org/10.1063/1.4922336
Walters DJ, Biswas A, Lawrence EC, Francom DC, Luscher DJ, Fredenburg DA, Moran KR, Sweeney CM, Sandberg RL, Ahrens JP, Bolme CA (2018) Bayesian calibration of strength parameters using hydrocode simulations of symmetric impact shock experiments of Al-5083. J Appl Phys 124(20):205105. https://doi.org/10.1063/1.5051442
Bernstein J, Schmidt K, Rivera D, Barton N, Florando J, Kupresanin A (2019) A comparison of material flow strength models using Bayesian cross-validation. Comput Mater Sci 169:109098. https://doi.org/10.1016/j.commatsci.2019.109098
Vogler TJ, Hudspeth MC (2021) Tamped Richtmyer–Meshkov instability experiments to probe high-pressure material strength. J Dyn Behav Mater. https://doi.org/10.1007/s40870-020-00288-y
Lind J, Nelms MD, Robinson AK, Kumar M, Barton NR (2021) Examining material constitutive response under dynamic compression and large plastic strains using in situ imaging of hole closure. Acta Mater 206:116584. https://doi.org/10.1016/j.actamat.2020.116584
Nelms M, Lind J, Margraf J, Qamar SB, Herrington J, Robinson A, Kumar M, Barton N (2022) High-rate strength response of tantalum from dynamic hole closure experiments. J Appl Phys 132(17):175102. https://doi.org/10.1063/5.0107391
Sjue SK, Biswas A, Francom DC, Luscher DJ, Plohr JN, Walters DJ (2021) The Impala’s horn applied to posterior samples of Ti-6Al-4V strength model parameters. Los Alamos Natl Lab Rep. https://doi.org/10.2172/1770086
Plunkett B, Cazacu O, Lebensohn RA, Barlat F (2007) Elastic-viscoplastic anisotropic modeling of textured metals and validation using the Taylor cylinder impact test. Int J Plast 23(6):1001–1021. https://doi.org/10.1016/j.ijplas.2006.10.008
Maudlin P, Bingert J, House J, Chen S (1999) On the modeling of the Taylor cylinder impact test for orthotropic textured materials: experiments and simulations. Int J Plast 15(2):139–166. https://doi.org/10.1016/S0749-6419(98)00058-8
Revil-Baudard B, Cazacu O, Flater P, Kleiser G (2015) Plastic deformation of high-purity α-titanium: model development and validation using the Taylor cylinder impact test. Mech Mater 80:264–275. https://doi.org/10.1016/j.mechmat.2014.03.010
Cerreta E, Chen SR, Gray GT, Pollock TM (2004) Dynamic deformation and damage in cast γ-TiAl during Taylor cylinder impact: experiments and model validation. Metall and Mater Trans A 35(9):2557–2566. https://doi.org/10.1007/s11661-004-0202-9
Borodin EN, Mayer AE (2015) Structural model of mechanical twinning and its application for modeling of the severe plastic deformation of copper rods in Taylor impact tests. Int J Plast 74:141–157. https://doi.org/10.1016/j.ijplas.2015.06.006
Walley SM (2020) Highways and byways in the history of high rate mechanical testing. J Dyn Behav Mater 6(2):113–158. https://doi.org/10.1007/s40870-020-00237-9
Hernandez C, Maranon A, Ashcroft IA, Casas-Rodriguez JP (2013) A computational determination of the Cowper-Symonds parameters from a single Taylor test. Appl Math Model 37(7):4698–4708. https://doi.org/10.1016/j.apm.2012.10.010
Acosta CA, Hernandez C, Maranon A, Casas-Rodriguez JP (2016) Validation of material constitutive parameters for the AISI 1010 steel from Taylor impact tests. Mater Des 110:324–331. https://doi.org/10.1016/j.matdes.2016.07.134
Gao C, Iwamoto T (2021) Instrumented Taylor impact test for measuring stress-strain curve through single trial. Int J Impact Eng 157:103980. https://doi.org/10.1016/j.ijimpeng.2021.103980
Rivera D, Bernstein J, Schmidt K, Muyskens A, Nelms M, Barton N, Kupresanin A, Florando J (2022) Bayesian calibration of strength model parameters from Taylor impact data. Comput Mater Sci 210:110999. https://doi.org/10.1016/j.commatsci.2021.110999
Maudlin PJ, Bingert JF, Gray Iii GT (2003) Low-symmetry plastic deformation in BCC tantalum: experimental observations, modeling and simulations. Int J Plast 19(4):483–515. https://doi.org/10.1016/S0749-6419(01)00061-4
Preston DL, Tonks DL, Wallace DC (2003) Model of plastic deformation for extreme loading conditions. J Appl Phys 93(1):211–220. https://doi.org/10.1063/1.1524706
Burakovsky L, Greeff CW, Preston DL (2003) Analytic model of the shear modulus at all temperatures and densities. Phys Rev B 67(9):094107. https://doi.org/10.1103/PhysRevB.67.094107
Meyers MA (1994) Dynamic behavior of materials. Wiley, New York. https://doi.org/10.1002/9780470172278
Andrews SA, Fraser AM (2019) Estimating Physics models and quantifying their uncertainty using optimization with a Bayesian objective function. J Verif, Valid Uncertain Quantif. https://doi.org/10.1115/14043807
Lehmann EL, Casella G (2006) Theory of point estimation. Springer, Berlin. https://doi.org/10.1007/b98854
Prime MB, Arsenlis A, Austin RA, Barton NR, Battaile CC, Brown JL, Burakovsky L, Buttler WT, Chen S-R, Dattelbaum DM, Fensin SJ, Flicker DG, Gray GT, Greeff C, Jones DR, Lane JMD, Lim H, Luscher DJ, Mattsson TR, McNaney JM, Park H-S, Powell PD, Prisbrey ST, Remington BA, Rudd RE, Sjue SK, Swift DC (2022) A broad study of tantalum strength from ambient to extreme conditions. Acta Mater 231:117875. https://doi.org/10.1016/j.actamat.2022.117875
Park H-S, Lorenz KT, Cavallo RM, Pollaine SM, Prisbrey ST, Rudd RE, Becker RC, Bernier JV, Remington BA (2010) Viscous Rayleigh–Taylor instability experiments at high pressure and strain rate. Phys Rev Lett 104(13):135504. https://doi.org/10.1103/PhysRevLett.104.135504
Zhou Y (2017) Rayleigh–Taylor and Richtmyer–Meshkov instability induced flow, turbulence, and mixing. II Phys Rep 723–725:1–160. https://doi.org/10.1016/j.physrep.2017.07.008
Lebedev AI, Nizovtsev PN, Rayevsky VA, Solovyov VP (1996) Rayleigh–Taylor Instability in Strong Media, Experimental Study. Young R, Glimm J, Boston B (eds) Proceedings of the Fifth International Workshop on Compressible Turbulent Mixing.
Sternberger Z, Maddox B, Opachich Y, Wehrenberg C, Kraus R, Remington B, Randall G, Farrell M, Ravichandran G (2018) Inferring strength of tantalum from hydrodynamic instability recovery experiments. J Dyn Behav Mater 4(2):244–255. https://doi.org/10.1007/s40870-018-0153-7
Mikaelian KO (1993) Effect of viscosity on Rayleigh–Taylor and Richtmyer–Meshkov instabilities. Phys Rev E 47(1):375–383. https://doi.org/10.1103/PhysRevE.47.375
Piriz AR, Cela JJL, Tahir NA (2009) Richtmyer–Meshkov instability as a tool for evaluating material strength under extreme conditions. Nucl Instrum Meth A 606(1):139–141. https://doi.org/10.1016/j.nima.2009.03.094
Buttler WT, Oró DM, Preston DL, Mikaelian KO, Cherne FJ, Hixson RS, Mariam FG, Morris C, Stone JB, Terrones G, Tupa D (2012) Unstable Richtmyer–Meshkov growth of solid and liquid metals in vacuum. J Fluid Mech 703:60–84. https://doi.org/10.1017/jfm.2012.190
Sternberger Z, Maddox BR, Opachich YP, Wehrenberg CE, Kraus RG, Remington BA, Randall GC, Farrell M, Ravichandran G (2017) A comparative study of Rayleigh–Taylor and Richtmyer–Meshkov instabilities in 2D and 3D in tantalum. AIP Conf Proc 1793(1):110006. https://doi.org/10.1063/1.4971669
Prime MB, Buttler WT, Buechler MA, Denissen NA, Kenamond MA, Mariam FG, Martinez JI, Oró DM, Schmidt DW, Stone JB, Tupa D, Vogan-McNeil W (2017) Estimation of metal strength at very high rates using free-surface Richtmyer–Meshkov instabilities. J Dyn Behav Mater 3(2):189–202. https://doi.org/10.1007/s40870-017-0103-9
Prime MB, Buttler WT, Fensin SJ, Jones DR, Brown JL, King RS, Manzanares R, Martinez DT, Martinez JI, Payton JR, Schmidt DW (2019) Tantalum strength at extreme strain rates from impact-driven Richtmyer–Meshkov instabilities. Phys Rev E 100(5):053002. https://doi.org/10.1103/PhysRevE.100.053002
Olles JD, Hudspeth MC, Tilger CF, Vogler TJ (2021) The effect of liquid tamping media on the growth of Richtmyer–Meshkov instability in copper. J Dyn Behav Mater 7(2):338–351. https://doi.org/10.1007/s40870-021-00305-8
Bonora N, Testa G, Ruggiero A, Iannitti G, Mortazavi N, Hörnqvist M (2015) Numerical simulation of dynamic tensile extrusion test of OFHC copper. J Dyn Behav Mater 1(2):136–152. https://doi.org/10.1007/s40870-015-0013-7
Burkett MW (2019) Eulerian Hydrocode Modeling of a Dynamic Tensile Extrusion Experiment. 2019 15th Hypervelocity Impact Symposium, https://doi.org/10.1115/hvis2019-057
Glazkov VS, Ignatova ON, Malyshev AN, Nadezhin SS, Podurets AM, Raevsky VA, Tyupanova OA (2009) Peculiarities of high-rate deformation of copper upon convergence of cylindrical channels by action of shock waves. AIP Conf Proc. https://doi.org/10.1063/1.3295245
Vogler TJ (2015) Shock wave perturbation decay in granular materials. J Dyn Behav Mater 1(4):370–387. https://doi.org/10.1007/s40870-015-0033-3
Cui C, Bhavsar P, Lopez-Hawa H, Madhavan V, Moscoso-Kingsley W (2020) Comparison of flow stress of aluminum alloy 6061–t6 obtained from chip pulling orthogonal cutting and Kolsky bar testing. Procedia Manuf 48:579–585. https://doi.org/10.1016/j.promfg.2020.05.161
Özel T, Zeren E (2005) A methodology to determine work material flow stress and tool-chip interfacial friction properties by using analysis of machining. J Manuf Sci Eng 128(1):119–129. https://doi.org/10.1115/1.2118767
Brown JL, Alexander CS, Asay JR, Vogler TJ, Ding JL (2013) Extracting strength from high pressure ramp-release experiments. J Appl Phys 114(22):223518. https://doi.org/10.1063/1.4847535
Klopp RW, Clifton RJ, Shawki TG (1985) Pressure-shear impact and the dynamic viscoplastic response of metals. Mech Mater 4(3):375–385. https://doi.org/10.1016/0167-6636(85)90033-X
Ravindran S, Gandhi V, Lovinger Z, Mello M, Ravichandran G (2021) Dynamic strength of copper at high pressures using pressure shear plate experiments. J Dyn Behav Mater 7(2):248–261. https://doi.org/10.1007/s40870-020-00287-z
Gandhi V, Ravindran S, Ravichandran G (2022) Dynamic strength of iron at high pressures and strain rates. Phys Rev Lett 128(1):015705. https://doi.org/10.1103/PhysRevLett.128.015705
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose. This work was supported by the U.S. Department of Energy (DOE) through the Los Alamos National Laboratory. Los Alamos National Laboratory is operated by Triad National Security, LLC, for the National Nuclear Security Administration of U.S. Department of Energy (Contract No. 89233218CNA000001). In particular, this work was partially supported by the Advanced Simulation and Computing program, including the Machine Learning project and the Physics and Engineering Models sub-Program (ASC-PEM). Los Alamos National Laboratory strongly supports academic freedom and a researcher’s right to publish; as an institution, however, the Laboratory does not endorse the viewpoint of a publication or guarantee its technical correctness.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
M.B. Prime is a member of SEM.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Prime, M.B., Merson, J.S. & Chen, SR. Physical Regime Sensitivity. J. dynamic behavior mater. 9, 248–261 (2023). https://doi.org/10.1007/s40870-023-00375-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40870-023-00375-w