
Abstract
Urban Air Mobility (UAM) is an evolving concept of passenger transportation providing on-demand flights within metropolitan environments, wherefore typically fully electric vertical take-off and landing aircraft are designed. Due to the underlying battery energy constraints, the design of UAM aircraft is very sensitive. Apart from the design considerations, the impact of aircraft operations on the entire UAM transport network must be examined. As there is no data from real-world operations available, this research article utilizes a system of systems simulation framework combining aircraft design with an agent-based simulation. The underlying approach offers the possibility of studying several parameters concerning UAM aircraft design and operations. In a case study focused on intra-city transport, aircraft design aspects regarding the payload capacity, the mission profile, and the reserve requirement are studied for a multirotor configuration. Furthermore, the aircraft operations aspects are focused on the turnaround procedures, the passenger demand, and the cruise speed. The multi-level sensitivity analysis ranging from the subsystem over the system of interest to the system of systems level allows us to trace the most sensitive aspects. Especially, the sensitivity analysis of battery fast-charging and swapping shows the importance of the holistic system of systems investigations for the successful development of UAM aircraft and services.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Urban Air Mobility (UAM) is an upcoming mode of transport promising on-demand aviation within congested city areas. Although the fundamental concept of urban air taxi transport has already existed several decades before, as summarized and contrasted by Vascik [1], the ride-share and transportation services company Uber pushed the development towards scalable on-demand aviation by the release of their white paper on their subsidiary Uber Elevate in 2016 [2]. The increased attention of established as well as startup aviation companies and aircraft manufacturers, but also research and academia resulted in an enormous amount of Vertical Take-Off and Landing (VTOL) aircraft concepts for UAM operations. The utilization of distributed electric propulsion enables a large design space for different hybrid- or all-electric VTOL (eVTOL) aircraft configurations, with a large share of all-electric concepts in the emerging industry. Here, winged configurations, e.g. vectored thrust and lift + cruise, as well as wingless configurations, e.g. multirotor and helicopter, are proposed for different use cases [3]. Basically, the use cases range from short-range airport shuttle and intra-city to longer-range sub-urban and megacity missions [4]. The evolving UAM industry mainly targets the entry into service and initial operations within the next few years, i.e. approximately around the year 2025.
Generally, the design of eVTOL aircraft is particularly sensitive due to the underlying battery technology constraints, where the mission profile also has a major influence [5]. Therefore, both design and operational aspects must be thoroughly considered to develop well-sized eVTOL aircraft. Besides influencing the eVTOL aircraft configuration selection due to their vastly different performance characteristics, this implies that the Concept of Operations (CONOPS), i.e. the plan of how a system should function in operational application, must be carefully defined and investigated during the design process (for a comprehensive definition of CONOPS, the reader is referred to [6]). In that context, considering a fleet of multiple aircraft in their operational environment, different operational aspects, e.g. flight or turnaround procedures, may not only have an impact on each constituent aircraft but also on the entire UAM transport network.
Accordingly, the objective of this study is to analyze the sensitivity of several parameters regarding UAM aircraft design (i.e. payload capacity, mission profile, reserve requirement) and operations (i.e. passenger demand, turnaround procedure, cruise speed). Hence, a case study is conducted, which considers an initial assumed UAM scenario for the City of Hamburg, Germany. As there is no data from real-world operations available yet, conceptual aircraft design methods are coupled with a fleet operations simulation to investigate UAM aircraft design and operations. The coupling of both methods not only allows for the modelling of the vehicles’ flight performance but also their energy performance and battery management, the latter of which is critical for highly energy-limited electric aircraft. By this approach of modelling the sized aircraft in the fleet operations simulation, evaluations can be performed at the UAM transport system level. For the purpose of our research, UAM is considered as a complex System of Systems (SoS), which will be explained in the following chapter.
The presented work is related to the HorizonUAM research project at the German Aerospace Center (DLR). An overview of the project is provided by Schuchardt et al. [7].
This article is structured as follows: subsequent to this introductory Chapter 1, Chapter 2 explains the framework for the SoS approach, including eVTOL aircraft design considerations and simulation implementations. Further on, Chapter 3 introduces the case study with all assumptions and parameters, after which Chapter 4 provides results and discussions for the sensitivity analysis. Finally, Chapter 5 concludes the article and presents upcoming future work.
2 System of systems framework
Generally, an SoS can be defined as a “set of systems or system elements that interact to provide a unique capability that none of the constituent systems... can accomplish on its own” [8]. It can further be elaborated to have typical characteristics such as operational and managerial independence, geographical distribution, emergent behavior, evolutionary development and heterogeneity of constituent systems [9, 10].
With regard to UAM, the SoS consists of several constituent systems, e.g. aircraft, vertiports, air traffic management, etc., whereas the System of Interest (SoI) focused in this study is the aircraft and its associated technologies. Consequently, an SoS simulation offers the possibility of studying several aspects of UAM aircraft design and operations before the deployment of UAM transport services. An Agent-Based Simulation (ABS) was chosen as it enables the explicit modelling of the various stakeholders involved in an SoS and their interactions, which subsequently eases investigative studies of the model’s governing parameters and logic. Moreover, with an ABS, the data exchange between stakeholders can be clearly represented, and a rule-based logic definition employed. This comprehensive SoS approach also allows for a multi-level sensitivity analysis ranging from the subsystem over the SoI to the SoS level. Thereby, the most sensitive parameters can be traced and can also be allocated to a specific level. An overview of the applied framework for SoS analyses in the field of UAM is depicted in Fig. 1. It should be noted that this study does not focus on all the possible fields of research to which the framework can be applied to. Therefore, dashed lines represent momentarily, i.e. for the scope of this study, unused or future fields. To elaborate with respect to the ABS: in this study the focus is placed on the vehicle operator, therefore, limited modelling of the enabling stakeholders such as vertiport and air traffic management are considered. In future studies, more explicit modelling of the other stakeholders will be employed.

Several simulation-driven investigations have been carried out in the literature with a focus on different aspects of UAM operations. The airside operations at the vertidrome were investigated and a performance assessment concept proposed [11]. In addition, a comparison of ground transport and air transport through UAM was made in terms of travel time savings [12]. Several demand-focused studies have also been carried to investigate the attractiveness of UAM based on different factors [13,14,15]. However, to the authors knowledge, simulations for the purpose of aircraft design and fleet evaluation are limited in literature. A similar approach compared to this framework has been proposed by Patterson et al. [16] consisting of three phases: defining mission requirements, designing an aircraft for the missions, and simulating the UAM transport network, with feedback iteratively propagated through each of the three phases. Initial investigations deploying the aforementioned three-phase approach are carried out by Kohlman et al. [17]. While Patterson et al. [16] focus on defining the mission requirements, Kohlman et al. [17] carry out conceptual sizing and simulation of the UAM network. In comparison, this study applies the mission requirements with the aid of the use case definitions from [4] and the main focus is placed on conceptual UAM aircraft design and the SoS simulation of the UAM transport system. Here, emphasis is placed on capturing aircraft design and operational considerations, fleet assessment, and the propagation of subsystem as well as SoI level parameters to the SoS level.
The initial explorations of the aircraft architecture design parameters and operational considerations using this SoS simulation framework were carried out in [18], where we have carried out several sensitivity studies to understand their impacts on the SoS. Among other parameters, we have investigated different flight speeds, seating capacities and overall technology scenarios for various UAM aircraft configurations. Following this initial exploration, the SoS simulation framework was utilized to explore in more detail the different UAM aircraft configurations and powertrain architectures for different scenarios and use cases [19]. Herein, different battery technology levels were investigated by sensitivity studies. Furthermore, it was extended for life cycle assessment of UAM operations [20]. These studies are also indicated and referred to in Fig. 1, where they can be found in their respective field of research.
In addition, a very similar framework was implemented on a vastly different application: the aerial suppression of wildfires, where several design variables associated with the aerial suppression vehicles were explored to investigate their impacts on the SoS level parameters [21].
The required framework components, i.e. aircraft design and simulation, will be explained in the following sections.
2.1 Aircraft design
The eVTOL aircraft configuration taken into consideration for this case study is a multirotor vehicle. This particular configuration is often proposed by several UAM aircraft designers. For example, the startup companies EHang and Volocopter are both working on multirotor vehicles for urban passenger transport [22, 23]. Since this case study also focusses on urban transport use cases for an initial UAM scenario, the sensitivities regarding the design and operations of this specific eVTOL aircraft configuration may be of interest and will be examined throughout this article.
2.1.1 Top-level aircraft requirements
The Top Level Aircraft Requirements (TLARs) consist of mission as well as aircraft-specific requirements and will be explained in the following.
Regarding the sizing mission it should be noted that several considerations are made to ensure a fairly wide operational envelope for the eVTOL aircraft despite adverse weather conditions. Accordingly, high and hot atmosphere as well as headwind are modelled in the sizing mission, even though these sizing conditions will not be considered in the subsequently executed ABS, where standard conditions are assumed (see Chapter 3).
Overall, only a relatively short operating range of 30 km is required for airport shuttle and intra-city operations for this case study (see Sect. 3.1). The departure and arrival vertiports are situated at 2000 ft above Mean Sea Level (MSL), whereas International Standard Atmosphere (ISA) conditions at a temperature offset of plus 20 K is assumed. Furthermore, a constant headwind of 30 km/h is present during all forward flight segments. After an initial startup time of 30 s, the vehicle climbs vertically at a rate of 100 fpm to 50 ft Above Ground Level (AGL). Thereafter, it transitions to forward flight at a constant acceleration of 0.2 g. The subsequent cruise climb is performed at a vertical climb rate of 750 fpm and best endurance speed Vbe until the cruising altitude is reached at 1500 ft AGL. During cruising flight, the aircraft flies at its best range speed Vbr. The sizing mission does also accounts for a reserve segment; however, it does not include cruise descent. Eventually, the mission profile terminates in the inverse order with regard to its start.
The two considered sizing mission profiles for a single-flight mission and a multi-flight mission are shown in Figs. 2 and 3, respectively. Basically, the multi-flight mission profile does account for two legs or one stop, within the required operating range of 30 km.

Single-flight mission profile

Multi-flight mission profile
There are two different reserve requirements assumed for the purpose of this study. As an alternative to the standard 20-min loiter segment at Vbe, we also propose a direct diversion segment performed at Vbr. Based on the case study (see Sect. 3.1), the diversion distance is set to 10 km. Since the operating range is simply extended by the diversion distance, the headwind is also present during the diversion segment.
Considering the aircraft-specific requirements, two different payload capacities are investigated in this study. These are 2 and 4 Persons On Board (POB), whereas the mass per person is assumed to be 110 kg to make airport shuttle operations with heavy luggage feasible. While the vehicle is designed for autonomous operations, in the case of piloted operations, the pilot occupies one of the available seats, which reduces the actual Passenger (PAX) capacity. Hence, the terms 2 POB and 4 POB must not be mistaken for 2 PAX and 4 PAX, but are rather equivalent to 2-seater and 4-seater.
2.1.1.1 Sizing procedure and considerations
The underlying conceptual aircraft design methodology has been introduced prior to this study in [19] and is extensively documented in [24]. This involves methods from textbooks for aerodynamics, performance, weights, and sizing, which are implemented in a Python tool. The tool is run with a list of inputs consisting of cabin, mission, and rotor parameters. While cabin and mission inputs are derived directly from the TLARs from Sect. 2.1.1, the rotor sizing inputs are presented subsequently.
For the aircraft design tool existing sizing and performance methodologies for conceptual eVTOL design from [25, 26] are brought together and extended. Therein, momentum theory, as described by Leishman [27], is utilized for the rotor performance computations. Furthermore, the airframe component weight estimations refer to Prouty [28] and Roskam [29] The powertrain is sized based on the efficiency and specific power as well as specific energy of the respective powertrain component, as explained in [19, 30]. In modelling the battery, a simplified constant discharge behavior is assumed by applying an appropriate maximum depth of discharge of 80% to avoid non-linear areas where the available power is limited. The flight performance computations account for an induced power correction factor of 1.2 as used in [26, 27]. Moreover, the battery performance is subject to a combined powertrain efficiency of about 0.87 as modeled for an all-electric powertrain architecture in [19, 30].
With regard to a near-term scenario around the year 2025, fairly optimistic battery technology assumptions are made on pack level (see Table 1). The impact of future battery technology on aircraft design and operations have been analyzed in previous studies [18, 19]. In this study, the assumptions for battery technology are considered fixed, which we believe is appropriate for the near-term outlook of the scenario under consideration.
Furthermore, the rotor sizing inputs are summarized in Table 2. To limit the maximum footprint of the different multirotor design outputs, a geometric constraint is imposed on the rotor diameter. For flight control purposes, it is assumed that the aircraft relies on rotor speed control.
Based on the aforementioned mission requirements and rotor inputs, the sizing procedure consists of a common aircraft sizing loop that terminates as soon as the Maximum Take-Off Mass (MTOM) is converged. More details on the sizing loop can be found in [19, 24].
As per further sizing considerations, the vehicle must be certifiable according to the special condition for small-category VTOL aircraft [31], which is issued by the European Union Aviation Safety Agency (EASA). Thus, an MTOM of 3175 kg must not be exceeded. Moreover, the powertrain is sized for a failure of up to 2 rotors and the airframe weight estimations account for a load factor of 3.5.
Finally, the performance of the resulting aircraft design output is computed and provided to the simulation, while considering the case study parameters, which will be introduced in Sect. 3.1 (note that the case study mission setup differs from the before used sizing mission in terms of weather conditions). Overall, the performance accounts for all possible load factors and mission segments. Furthermore, the reserve energy must not be utilized during normal operations.
2.2 Agent-based simulation
The ABS of UAM used in this study is powered by the DLR in-house simulation toolkit [32]. Figure 4 provides an overview of the related models. The ABS is composed of the Demand Model, the Agent Model and the additional classes and methods defined for the additionally implemented features. Two demand models are defined in the ABS. In this study, the Parametric Demand model is used with assumed demand distributions at each vertiport. The Agent Model is composed of three types of agents. Namely the aircraft agent which performs the missions, the dispatcher agent which assigns and dispatches the flights and the vertiport manager agent which tracks and limits the number of agents at the vertiport.

Overview of the agent-based simulation [18]
2.2.1 Demand model
In this study, the Parametric Demand Model is used to generate the demand. Assumed inflow and outflow demand distributions are used at each vertiport. The demand is generated in accordance with the given outflow and inflow distributions in Fig. 6 as follows: In each iteration of the simulation, the outflow demand magnitude at a given vertiport is accessed based on the current time, and converted into a probability of demand generation per time step. This value is compared against a chance value chosen by a seeded random number generator, if the chance value exceeds the probability, an outgoing passenger is defined at that vertiport. To select the passenger’s destination, the inflow magnitude at each of the other vertiports are evaluated at the current time, and a weighted choice selection is made based on the inflow magnitudes. This process is repeated for each vertiport in the simulation, in each iteration of the simulation. A more in-depth description of the demand generation logic can be found in [18, 19].
2.2.2 Agent model
On the generation of each demand by the Demand Model, the Dispatcher Agent is tasked with assigning the generated demand to an Aircraft Agent. The selection of the Aircraft Agent is done through a bidding process where the bid takes the form:
where:
The bid composed of three factors each multiplied by weights to model the dispatch priorities. These priorities are:
-
1.
Maximize the load factor (w1 = 10)
-
2.
Minimize wait time for passengers (w2 = − 1)
-
3.
Prioritize aircraft with higher states of charge (w3 = 0.1)
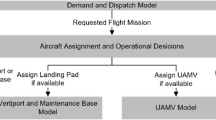
Each factor in the bid equation is normalized and then multiplied by a weight factor set with an order of magnitude difference to model the set priorities. Once the demand is generated the Dispatcher Agent calls on all the Aircraft Agents to submit a bid for the demand and selects the agent with the highest bid. The mission is then allocated to one of the two available mission slots of the bid-winning Aircraft Agent, following the logic given in Fig. 5. In brief, the dispatcher attempts to assign the demand to the first viable mission slot. A key aspect of the model is that multiple passengers can be assigned to the same mission if seats are available and if the origin-destination pairs are suitable. This means that the load factor achieved by an aircraft is dependent on the demand model, i.e. the full capacity utilization can be achieved only if sufficient demand exists for that mission in that time span. It is also considered that the passenger waits for their assigned mission regardless of the wait time.

Mission allocation logic based on [18] and modified as depicted in red
In this study, a change to the mission assignment logic is implemented as compared to previous studies [18, 19]. Namely, if the next mission slot is the only free slot, and if a deadhead mission is required for the demand to be assigned, then the demand is not assigned instead of dispatching a deadhead flight as in previous studies (highlighted in red in Fig. 5). In this case, as the demand is not assigned, it is open for bid in subsequent iterations of the simulation until it is successfully assigned to an Aircraft Agent. This change was implemented to reduce the number of deadhead flights dispatched as the previous modelling resulted in superfluous dispatch of deadhead flights at the lower fleet sizes when the fleet is not sufficient to serve the demand. However, the viable fleet sizes in terms of SoS effectiveness are observed to be similar for both the models, as well as the SoS effectiveness for the greater fleet sizes. The sensitivities of the ABS, beyond the results presented in this study, can be found in a previous study [18].
3 Case study
To carry out the sensitivity analyses of selected aircraft design and operational parameters posed in this research article, a case study is conducted. The setup and limitations will be explained in the following sections.
3.1 Setup
The exemplary use case of Hamburg is set up as in previous studies [18,19,20] with the assumed vertiport locations and demand distributions as given in Fig. 6. Here, the outflow demand is depicted in solid color and the inflow demand is depicted with no fill. In future studies, the vertiport locations and the demand distributions will be updated based on market and demand projections, city topography, travel patterns and other considerations. In this study, as in the previous studies, the infrastructure and demand definitions are assumed to conduct the sensitivity analyses.

The maximum mission distance in this use case is approximately 25 km, whereas the average mission distance is approximately 15 km. Therefore, the operating range of the sizing mission allows for a 20% additional range compared to the maximum mission distance. Besides, the multi-flight mission profile reasonably matches the average mission distance.
Operations in the near term for a time frame around the year 2025 are considered with both the airport shuttle and intra-city use cases merged together [4]. This scenario assumption is based on the projected entry into service from the evolving industry.
The revenue flights are assumed to be piloted whereas the deadhead flights are considered to be pilotless, although pilot availability is not considered.
Further details of the case study parameters and the sensitivity analysis parameters are presented in Tables 3 and 4, respectively. Note that the baseline values are underlined.
The varied design parameters in terms of TLARs have already been explained in Sect. 2.1.1. Together with additional parameters for aircraft operations, all varied sensitivity analysis parameters are summarized in Table 4. For each operational aspect, three varying parameters are analyzed using the ABS.
First, three vastly different turnaround procedures are studied, where battery charging, battery fast-charging and swapping are compared. In the ABS, the batteries are charged at a constant power until sufficient energy is available for the next mission of the aircraft. Due to the previously defined maximum depth of discharge of 80% for the battery (see Table 1), the charging behavior can be modeled as linear. The constant charging power is determined by the assumed C-rate, whereas the time to fully charge the battery is the reciprocal of the C-rate and is given in brackets. Alternatively, battery swapping is taken into considerations. In the ABS, the batteries are only swapped, if the remaining energy is not sufficient for the next mission of the aircraft or if the next mission has not yet been assigned when the aircraft lands. A fixed duration of 5 min is assumed for battery swapping.
Next, three different scenarios are set up, since the passenger demand is difficult to predict and may be varying for different weekdays, for example. The passenger demand assumptions are related to the total number of passengers per day.
Finally, the impact of three slightly different cruise speeds is also studied. The cruise speeds are related to Vbr and the maximum speed Vmax of the aircraft. It should be noted that, compared to the sizing mission, the aircraft fly at a constant forward flight speed in the ABS (see Sect. 2.1). Therefore, Vmax is typically determined by the cruise climb segment, where usually a higher power compared to the other mission segments is required.
3.2 Limitations
This study is a continuation of the initial series of investigations carried out for the UAM case study by the authors. Extended considerations regarding aircraft design criteria and operational scenarios are investigated to identify key trends and sensitive parameters. Due to the limited information on UAM aircraft specifications, market and operations several assumptions are made resulting in the following limitations.
Regarding the aircraft design, we utilize a tool for initial sizing, mass, and performance calculations based on handbook methods for conventional aircraft and rotorcraft. Due to the current lack of real-world data for comparable eVTOL aircraft configurations, the implemented models may over- or underestimate certain aspects of the aircraft design results, e.g. the airframe mass estimation. Furthermore, it should be noted that the battery swapping capability was assumed to have no impact on the vehicle design, but only on the turnaround times. This is obviously a simplification considering the early conceptual design stage.
Homogenous fleets are assumed, where each aircraft agent is of the same type and characteristics. The authors recognize that heterogenous fleets may provide significant enhancements to the SoS effectiveness, however this requires further improvements to the dispatch logic and will be considered in future studies.
The revenue flights are assumed to be piloted whereas the deadhead flights are assumed to be pilotless, however the balancing of the pilots is not considered. It is assumed that a pilot is always on-site and available when needed. The movement of pilots between vertiports, or aircraft are also not considered.
The framework assumes pseudo passenger demand and unlimited vertiport landing pads and parking/gate capacity.
The UAM passenger demand can be included in future investigations after a comprehensive market study is available in literature. The limits to vertiport landing pads and parking/gate capacity will be considered in future work through improvements to the dispatching of deadhead flights. If the vertiport / gate capacity limitations were considered, the number of deadhead flights needed may increase as reallocation of vehicles would not only be due to the passenger demand (as in the current model), but also due to the parking limitations at the vertiports. In addition, if the limitation on the number of available landing pads was considered, it would become a limiting factor in the network particularly during peak hours. However, by ensuring the adequate sizing of the number of landing and takeoff pads at vertiports, this issue can be alleviated.
In this work, the assumption is made that the passengers await the assigned flight regardless of how long the delay may be. While this assumption represents a limitation in the approach, the goal of the authors is to identify the vehicle and fleet which can transport the assumed demand effectively, especially considering the waiting time experienced by the passengers. Therefore, only the cases resulting in more than 80% of all passengers experiencing a wait time of under 15 min are identified and discussed in Chapter 4.
Simple direct flight trajectories are assumed between vertiports. Ideally, trajectories should be modelled considering important factors such as noise disturbance and airspace clearance.
Moreover, it is worth to note that the framework used in this study is under continuous development and future studies will involve incremental improvements.
4 Results and discussions
Before the results are presented and discussed, the evaluation parameters or measures of effectiveness for the UAM transport system utilized in this study are summarized below:
Fleet size | = Total number of aircraft simulated as a homogeneous fleet | [count] |
Revenue passengers | = Total number of passengers transported | [count] |
Revenue flights | = Total number of passenger flights | [count] |
Successful missions | = Percentage of passengers transported within a maximum wait time of 15 min | [%] |
Deadhead ratio | = Ratio of deadhead flights to total flights | [–] |
Load factor | = Average load factor of all revenue and deadhead flights (excluding the pilot) | [–] |
Total fleet energy | = Total electric energy used by the fleet not considering charging losses | [kWh] |
Energy per PAX-km | = Electric energy used by the aircraft per km accounting for the load factor | [kWh/PAX/km] |
Hereinafter, the following sections will address the parameter sensitivities with regard to UAM aircraft design and operations, as introduced before.
4.1 Aircraft design parameter sensitivities
The subsequent results focus on UAM aircraft design, where the sensitivities regarding payload capacity, mission profile, and reserve requirement will be presented. An excerpt of the aircraft design results is included in the Appendix (see Table 5).
Generally, from the SoI perspective, it can be stated that all multirotor design outputs result in an MTOM that satisfies the EASA certification requirement (see Sect. 2.1.2). The Appendix provides an extract of the SoI results for this case study. The highest MTOM results in the case of the multirotor subject to the most demanding requirements, i.e. 4 POB, multi-flight mission profile, and 20-min loiter. Here, the MTOM converges at 1828 kg.
It must also be considered that the required charging power increases drastically for the heavy aircraft design outputs, which is a result of the heavier, thus higher capacity battery. Battery fast-charging, which is assumed at a C-rate of 2, for the heaviest and previously mentioned design output requires a charging power of about 446 kW at the charging point if an efficiency of 0.9 is applied. The lightest of the 4 POB aircraft needs a charging power of approximately 189 kW. In contrast, the 2 POB aircraft design outputs only require charging powers in the range of 82–118 kW for the same battery charging assumptions.
4.1.1 Payload capacity
Regarding the SoI results, it is found that doubling the payload capacity from 2 POB (220 kg) to 4 POB (440 kg) leads to about 2.24 times higher MTOM (2 POB: MTOM = 666 kg and 4 POB: MTOM = 1490 kg). Consequently, the larger and heavier multirotor cruises at a 25% higher Vbr of approximately 100 km/h. Also, the cruise efficiency (product of aircraft weight and speed divided by the required battery power) of the 4 POB variant is reduced from 3.54 to 2.66, which is approximately 33%. This is due to the increased MTOM, which is a result of the comparably low cruise efficiency of this eVTOL configuration and its sensitivity regarding the battery-specific energy constraints. The cruise efficiency may be increased by improvements to the multirotor design inputs, e.g. rotor sizing and battery design, or by deploying a winged, thus more cruise-efficient eVTOL configuration, whereas the hover performance must not be neglected and is regarded in the following. Since the rotor diameter is limited to a maximum value of 2.3 m in the aircraft design process, the heavy design outputs, e.g. 4 POB aircraft variants, typically converge at this predefined rotor diameter constraint. Therefore, the disk loading of the respective aircraft increases, which consequently diminishes the hover or vertical flight efficiency. Hence, the overall aircraft performance is reduced in case of heavy design outputs.
The SoS perspective, provided in Fig. 7, shows that the number of revenue flights required to serve the same demand is approximately 50% less for the larger aircraft, nonetheless, it requires about 34% more energy on a fleet level, which is due to the previously discussed SoI results. Although the available seats are increased by a factor of 3 by the 4 POB aircraft over the 2 POB aircraft (after accounting for the pilot), a proportional reduction of revenue flights is not observed as the 4 POB aircraft are not always operated at full occupancy. Rather, a middle ground is observed corresponding to the actually achieved load factor of 0.64, as opposed to the load factor of 1 achieved by the 2 POB aircraft (only a single passenger seat available). Similar observations can be made for the energy per PAX-km that accounts for the load factor, resulting in an energy per PAX-km that is considerably higher for the 4 POB aircraft fleet. With regard to the required fleet size for reasonable SoS effectiveness, 24 of the larger 4 POB aircraft are needed. Compared to a fleet of 57 smaller 2 POB aircraft, the fleet size can be reduced by about 58%.

Payload capacity sensitivity
4.1.2 Mission profile
Two different sizing mission profiles, as previously shown in Figs. 2 and 3, were investigated for their impact on the SoI performance and SoS effectiveness. For the SoI sensitivities it is found that the additional stop of the multi-flight mission profile leads to a slightly higher MTOM of 703 kg for the 2 POB payload capacity. This is a difference of only 37 kg or approximately 5% compared to the single-flight mission profile and is intended so that more battery energy for the additional stop is available. Therefore, the cruise efficiency and overall aircraft performance are very similar. However, the 4 POB aircraft is more sensitive to this change of the sizing mission profile, which can be observed by the increase of MTOM from 1490 kg for the single-flight compared to 1828 kg for the multi-flight mission profile. This clear increase of MTOM is due to the same reasons regarding efficiency and battery constraints as discussed for the sensitivity of payload capacity (see Sect. 4.1.1). As a consequence, the aircraft performance of the 4 POB aircraft, which is sized for the multi-flight mission profile, is reduced.
The SoS results are shown in Fig. 8. No discernible differences in the passenger carrying capacity are observed for both mission profiles, whereas for the fleet of smaller 2 POB aircraft an increase of successful missions (4–10%) is seen for the multi-flight over the single-flight mission profile, as it was intended. However, this performance increase also results in a higher total fleet energy usage of 8% for the smaller 2 POB aircraft fleet. For the larger 4 POB aircraft fleet, the energy usage is significantly higher (increase of 35%) for the multi-flight sizing, whereas no significant impact on the SoS effectiveness is observed. Consequently, the larger 4 POB aircraft should rather be sized considering the single-flight mission profile.

Mission profile sensitivity
4.1.3 Reserve requirement
Different reserve requirements, i.e. 20-min loiter and 10-km diversion, are studied with regard to the aircraft design sensitivities. The SoI level analysis reveals that the assumed use case-specific reserve requirement reduces the MTOM of the 2 POB aircraft from 666 to 619 kg, which is the lightest MTOM of all the design outputs. Similarly, the MTOM of the 4 POB aircraft is reduced from 1490 kg to only 1167 kg, which is a reduction of approximately 22%. As a consequence, the aircraft performance is reduced for the heavier aircraft, of course.
The impact of reserve requirement on the SoS effectiveness is subtle as is shown in Fig. 9. The revenue passenger carrying capacity is nearly unaffected and minor differences can be observed in the successful missions due to changes in reserve requirement for the mid fleet sizes. Here, it is observed that the 20-min loiter requirement for the reserve gives subtle improvements over the 10-km diversion requirement. This behavior might be due to the 20-min loiter requirement resulting in a heavier vehicle with a higher best range speed and a slightly greater battery capacity available for the missions. This minor increase in best range speed, which is used as cruise speed, might give slight improvements to the SoS effectiveness, however, results in a significant increase in energy usage of approximately 40% for the 4 POB aircraft fleet and an approximately 10% increase for the 2 POB aircraft fleet.

Reserve requirement sensitivity
4.2 Aircraft operations parameter sensitivities
The following results focus on different UAM aircraft operations, where the sensitivities with regard to turnaround procedure, passenger demand and cruise speed will be provided.
4.2.1 Turnaround procedure
The effect of the turnaround procedures on the SoS effectiveness is shown in Fig. 10. The charging at 0.5 C (full charge in 120 min) reduces fleet effectiveness significantly in terms of passenger carrying capacity and successful missions compared to fast-charging and battery swapping. The differences in battery swapping and fast charging (full charge in 30 min) is less drastic but yet still significant for the fleet of aircraft with 2 POB. The successful missions are more sensitive to this change than the passenger carrying capacity. For the fleet of smaller aircraft, the change from battery swapping to fast charging will require an increase of fleet size by 18% for similar successful missions (approximately 85%). Lastly, the difference between battery swapping and fast-charging is almost negligible for the fleet consisting of 4 POB aircraft with the fleets reaching highly successful missions at the same fleet size.

Turnaround procedure sensitivity
4.2.2 Passenger demand
The ability of different fleet and aircraft sizes to cater to changes in passenger demand is investigated and its impacts on the SoS effectiveness are given in Fig. 11. For the fleet of smaller 2 POB aircraft an increase of 50% in the demand necessitates a fleet size increase of 35% (from 42 to 57 aircraft) to achieve similar SoS effectiveness. Similarly, for the fleet of larger aircraft with 4 POB, an increase in demand of 50% only necessitates an increase of fleet size of approximately 29% (from 21 to 27 aircraft). Considering the number of flights required to serve the demand, a 50% increase in demand results in a proportional increase in revenue flights for the 2 POB aircraft fleet due to the aircraft having only a single passenger seat, whereas only a 30–40% increase in revenue flights is observed for the 4 POB aircraft fleet because the remaining demand delta is served by a higher capacity utilization of those revenue flights. This shows that fleets composed of larger aircraft are more capable of handling increases in passenger demand as they can carry multiple passengers in the same trip.

Passenger demand sensitivity
4.2.3 Cruise speed
Lastly, we investigate the sensitivity of the cruise speed on the SoS effectiveness shown in Fig. 12. The same aircraft is flown at three different speeds, namely 0.9 Vbr, Vbr, and Vmax of the aircraft. Flying at higher speeds slightly improves the passenger carrying capacity. The impact on the successful missions is more significant with the change in cruise speed with a 10% difference observed between Vbr and Vmax even at the highest fleet size considered. This difference is tied to the 15-min target wait time criteria used for the evaluation of a successful mission and the distance between vertiports. The maximum distance between any two vertiports in the setup used in this study is 25 km, this means that for the baseline aircraft shown here, this mission would be flown in 20, 18.5, and 15.5 min for 0.9 Vbr, Vbr, and Vmax, respectively. This maximum distance cannot be flown in the set target wait time, meaning that if a deadhead flight was needed between this maximum distance route to pick up a passenger, then this mission would be counted as a failure. This issue can be alleviated by having larger fleets and it is expected that a large enough fleet will result in 100% mission success even for a fleet at a cruise speed of 0.9 Vbr. The improved SoS effectiveness at higher cruise speeds comes with a tradeoff of energy usage, namely the 10% increase in SoS effectiveness costs 4% more in fleet energy usage.

Cruise speed sensitivity
5 Conclusions and future work
In this research article, a sensitivity analysis of UAM aircraft design and operations was conducted in the context of a case study. With regard to aircraft design, the payload capacity, the mission profile, and the reserve requirement were examined. Furthermore, the aircraft operations analyses considered the turnaround procedure, the passenger demand, and the cruise speed.
For this assumed case study, several homogeneous multirotor fleets were designed and operated for airport shuttle and intra-city operations in the City of Hamburg, Germany, while considering a near-term scenario.
Regarding the aircraft design, it was found that especially the payload capacity impacts not only the SoI but also the SoS effectiveness. The mission profile and reserve requirements sensitivity analyses also showed interesting and understandable trends, however, these design parameters were found to be less sensitive for the SoS results.
The investigation of aircraft operations revealed that different turnaround procedures, including battery charging and swapping, are particularly sensitive. To ensure reasonable SoS effectiveness with regards to the introduced measures of effectiveness, fast-charging, if not swapping of batteries is of great importance. Generally, both options are sensible, whereas battery swapping improves the SoS effectiveness in some cases. Further criteria, e.g. cost and logistics, must be regarded for decision making. Finally, the variations in passenger demand and cruise speed lead to the expected SoS behavior, where the SoS effectiveness is especially sensitive to changing passenger demands. Thus, research on demand data forecasting is essential and required for more refined SoS studies in the field of UAM.
Generally, the success of UAM passenger transport depends on several aircraft and fleet design parameters. Thus, a comprehensive understanding of the aircraft design parameters is crucial for successful UAM deployment and optimization. Additionally, considering different operational strategies and scenarios is very important. The use of ABS significantly eased the process of carrying out the aforementioned investigations, while also ensuring the reusability and extensibility of the developed models when higher-fidelity stakeholder modelling is needed. Finally, SoS-driven aircraft design has non-linear couplings, which enforces the need for simulation-driven design for complex SoS evaluations.
In future work, the design of heterogenous fleets will be investigated to identify trends and patterns associated with fleet compositions and SoS effectiveness. In addition, the feedback loop between the requirements, aircraft design, and simulation will be established to arrive at an optimized fleet composition. Furthermore, projected demand data for UAM should be incorporated into the SoS analysis as soon as the data becomes available. Again, various CONOPS, e.g. on-demand and scheduled operations, may be studied in addition to different dispatch criteria. Moreover, the environmental impact of the UAM aircraft production and operations should be investigated through life cycle assessment. Also, noise and airspace clearances driven trajectories and considerations for public acceptance are important factors that can be considered in the UAM operations and fleet assessment. Lastly, the developed ABS can be extended to introduce random events and their mitigation strategies to assess the impact on the SoS effectiveness. These random events can include vehicle malfunctions, passenger or flight delays, and severe weather conditions, which need to be considered for the robust design of the UAM vehicles and fleets.
Data Availability
Not applicable.
Abbreviations
- ABS:
-
Agent-based simulation
- AGL:
-
Above ground level
- CONOPS:
-
Concept of operations
- E :
-
Energy
- EASA:
-
European Union Aviation Safety Agency
- eVTOL:
-
Electric vertical take-off and landing
- g :
-
Gravitational acceleration
- ISA:
-
International standard atmosphere
- MSL:
-
Mean sea level
- MTOM:
-
Maximum take-off mass
- n :
-
Number
- PAX:
-
Passenger(s)
- POB:
-
Person(s) on board
- SoI:
-
System of interest
- SoS:
-
System of systems
- TLAR:
-
Top level aircraft requirement
- UAM:
-
Urban Air Mobility
- t :
-
Time
- V be :
-
Best endurance speed
- V br :
-
Best range speed
- V max :
-
Maximum speed
- VTOL:
-
Vertical take-off and landing
- w :
-
Weightage
References
Vascik, P.D.: Systems Analysis of Urban Air Mobility Operational Scaling. PhD Dissertation, Cambridge (2020)
Holden, J., Goel, N.: Uber Elevate: Fast-Forwarding to a Future of On-Demand Urban Air Transportation (2016)
Electric VTOL News by the Vertical Flight Society: eVTOL Aircraft Directory. https://evtol.news/aircraft (2023). Accessed 26 Feb 2023
Asmer, L., Pak, H., Prakasha, P.S., Schuchardt, B.I., Weiand, P., Meller, F., Torens, C., Becker, D., Zhu, C., Schweiger, K., Volkert, A., Jaksche, R.: Urban Air Mobility Use Cases, Missions and Technology Scenarios for the HorizonUAM Project. In: AIAA Aviation 2021 Forum, Virtual Event, 2–6 Aug (2021). https://doi.org/10.2514/6.2021-3198
Clarke, M., Smart, J., Botero, E.M., Maier, W., Alonso, J.J.: Strategies for Posing a Well-Defined Problem for Urban Air Mobility Vehicles. In: AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 Jan (2019). https://doi.org/10.2514/6.2019-0818
ISO/IEC/IEEE International Standard 15288-2015: systems and software engineering—system life cycle processes (2015)
Schuchardt, B.I., Becker, D., Becker, R.-G., End, A., Gerz, T., Meller, F., Metz, I.C., Niklaß, M., Pak, H., Schier-Morgenthal, S., Schweiger, K., Prakasha, P.S., Sülberg, J.D., Swaid, M., Torens, C., Zhu, C.: Urban Air Mobility Research at the DLR German Aerospace Center—Getting the HorizonUAM Project Started. In: AIAA Aviation 2021 Forum, Virtual Event, 2–6 Aug (2021). https://doi.org/10.2514/6.2021-3197
ISO/IEC/IEEE International Standard 21839-2019: systems and software engineering—system of systems (SoS) considerations in life cycle stages of a system (2019)
Maier, M.W.: Architecting principles for systems-of-systems. Syst. Eng. 1, 267–284 (1998). https://doi.org/10.1002/(SICI)1520-6858(1998)1:4%3C267::AID-SYS3%3E3.0.CO;2-D
DeLaurentis, D.: Understanding Transportation as System-of-System Design Problem. In: 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 Jan (2005). https://doi.org/10.2514/6.2005-123
Schweiger, K., Knabe, F., Korn, B.: Urban Air Mobility: Vertidrome Airside Level of Service Concept. In: AIAA Aviation 2021 Forum, Virtual Event, 2–6 Aug (2021). https://doi.org/10.2514/6.2021-3201
Naser, F., Peinecke, N., Schuchardt, B.I.: Air Taxis vs. Taxicabs: A Simulation Study on the Efficiency of UAM. In: AIAA Aviation 2021 Forum, Virtual Event, 2–6 Aug (2021). https://doi.org/10.2514/6.2021-3202
Yedavalli, P.S., Onat, E., Peng, X., Sengupta, R., Waddell, P., Bulusu, V., Xue, M.: Assessing the Value of Urban Air Mobility through Metropolitan-Scale Microsimulation: A Case Study of the San Francisco Bay Area. In: AIAA Aviation 2021 Forum, Virtual Event, 2–6 Aug (2021). https://doi.org/10.2514/6.2021-2338
Maheshwari, A., DeLaurentis, D., Crossley, W.: Analyzing Impact of Unusual Changes in Travel Pattern on UAM Attractiveness. In: AIAA Aviation 2021 Forum, Virtual Event, 2–6 Aug (2021). https://doi.org/10.2514/6.2021-3177
Plötner, K.O., Al Haddad, C., Antoniou, C., Frank, F., Fu, M., Kabel, S., Llorca, C., Moeckel, R., Moreno, A.T., Pukhova, A., Rothfeld, R., Shamiyeh, M., Straubinger, A., Wagner, H., Zhang, Q.: Long-term application potential of urban air mobility complementing public transport: an upper Bavaria example. CEAS Aeronaut. J. (2020). https://doi.org/10.1007/s13272-020-00468-5
Patterson, M.D., Antcliff, K.R., Kohlman, L.W.: A Proposed Approach to Studying Urban Air Mobility Missions Including an Initial Exploration of Mission Requirements. In: AHS International 74th Annual Forum and Technology Display, Phoenix, AZ, USA, 14–17 May (2018)
Kohlman, L.W., Patterson, M.D., Raabe, B.E.: Urban Air Mobility Network and Vehicle Type—Modeling and Assessment. NASA/TM-2019-220072 (2019)
Prakasha, P.S., Naeem, N., Ratei, P., Nagel, B.: Aircraft architecture and fleet assessment framework for Urban Air Mobility using a system of systems approach. Aerosp. Sci. Technol. (2022). https://doi.org/10.1016/j.ast.2021.107072
Prakasha, P.S., Ratei, P., Naeem, N., Nagel, B., Bertram, O.: System of Systems Simulation driven Urban Air Mobility Vehicle Design. In: AIAA Aviation 2021 Forum, Virtual Event, 2–6 Aug (2021). https://doi.org/10.2514/6.2021-3200
Prakasha, P.S., Papantoni, V., Nagel, B., Brand, U., Vogt, T., Naeem, N., Ratei, P., Villacis, S.: Urban Air Mobility Vehicle and Fleet-level Life-Cycle Assessment Using a System-of-Systems Approach. In: AIAA Aviation 2021 Forum, Virtual Event, 2–6 Aug (2021). https://doi.org/10.2514/6.2021-2457
Prakasha, P.S., Nagel, B., Kilkis, S., Naeem, N., Ratei, P.: System of Systems Simulation Driven Wildfire Fighting Aircraft Design. In: AIAA Aviation 2021 Forum, Virtual Event, 2–6 Aug (2021). https://doi.org/10.2514/6.2021-2455
EHang: EHang AAV—The Era of Urban Air Mobility is Coming. https://www.ehang.com/ehangaav/. Accessed 26 Feb 2023
Volocopter: VoloCity—The superior air taxi. https://www.volocopter.com/solutions/volocity/. Accessed 26 Feb 2023
Ratei, P.: Development of a vertical take-off and landing aircraft design tool for the application in a system of systems simulation framework. Master thesis, Hamburg University of Applied Sciences (2022). https://elib.dlr.de/186947/
Kadhiresan, A.R., Duffy, M.J.: Conceptual Design and Mission Analysis for eVTOL Urban Air Mobility Flight Vehicle Configurations. In: AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 Jun (2019). https://doi.org/10.2514/6.2019-2873
Brown, A., Harris, W.L.: Vehicle design and optimization model for Urban Air Mobility. J. Aircr. (2020). https://doi.org/10.2514/1.C035756
Leishman, J.G.: Principles of Helicopter Aerodynamics, 2nd edn. Cambridge University Press, New York, NY (2006)
Prouty, R.W.: Helicopter Performance, Stability, and Control. Reissue, Krieger, Malabar, FL (2002)
Roskam, J.: Airplane Design Part V: Component Weight Estimation. DARcorporation, Lawrence, KS (1999)
Bertram, O., Jäger, F., Voth, V., Rosenberg, J.: Impact of Different Powertrain Architectures on UAM Vehicle Concepts. In: Deutscher Luft- und Raumfahrtkongress 2021, Bremen, Germany and Virtual, 31 Aug–02 Sep (2021)
European Union Aviation Safety Agency (EASA): Special Condition for small-category VTOL aircraft. SC-VTOL-01 (2019)
Kilkis, S., Prakasha, P.S., Naeem, N., Nagel, B.: A Python Modelling and Simulation Toolkit for Rapid Development of System of Systems Inverse Design (SoSID) Case Studies. In: AIAA Aviation 2021 Forum, Virtual Event, 2–6 Aug (2021). https://doi.org/10.2514/6.2021-3000
Acknowledgements
This study was presented at the German Aerospace Congress 2021, Bremen & Virtual, Germany, 31. Aug.–02. Sep. 2021.
Funding
Open Access funding enabled and organized by Projekt DEAL. This study was conducted within the research project “HorizonUAM—Urban Air Mobility Research at the German Aerospace Center (DLR)” and received DLR institutional funding. No external funding was received for conducting this study.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Table 5 summarizes an excerpt of several SoI results for this case study.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ratei, P., Naeem, N., Prakasha, P.S. et al. Sensitivity analysis of urban air mobility aircraft design and operations including battery charging and swapping. CEAS Aeronaut J (2024). https://doi.org/10.1007/s13272-024-00725-x
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s13272-024-00725-x