
Abstract
Egypt is grappling with water scarcity challenges, which are exacerbated by extensive urban development in arid coastal regions with rugged terrain. Although desalinated water is an alternative source in the remote Halayeib region of Southeast Egypt, its cost increases reliance on groundwater from the intricate aquifers. This study aims to accurately delineate hydro-structural features, known as lineaments, and assess their impact on the groundwater conditions in this promising region. This integrated approach involves the assessment of various spaceborne sensors, including optical (Landsat 8), Digital Elevation Models (ALOS and ASTER-DEMs), and radar (Sentinel-1), using geospatial and geostatistical techniques within the Geographic Information System (GIS). Radar-based sensors, particularly the Sentinel-1A vertical–vertical (S1A VV) polarization, outperform all other datasets in extracting lineaments, yielding 4883 lineaments that correspond to the regional geological faults. These lineaments trend in NE–SW, NNE–SSW, NW–SE, and E-W directions. The results also indicated that both digital elevation models (DEMs) were less effective, showing different orientations with azimuth angles. S1A VV proved to be highly effective in identifying subsurface fractured hard rock terrains beneath thin sedimentary covers, especially in the flat coastal area of Wadi Serimatai, where they intersected natural drainage pathways. Geoelectrical sections confirmed that there are orthogonal subsurface faults extending from fractured basement aquifers to near-surface layers. These faults align with the NE-SW and NNE-SSW directions observed in S1A VV lineaments. Geostatistical analysis revealed that S1A VV structural lineaments, lithological, and hydrogeological factors influence the occurrence of groundwater. This emphasizes the structural control over groundwater and its significant impact on water flow and storage. The study provides valuable insights for groundwater management, guiding decisions related to the development of groundwater resources.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Globally, freshwater stands as the most important natural resource essential for sustaining human life amidst unprecedented climatic and anthropogenic stressors. Water scarcity is a contemporary crisis that affects the socioeconomic and land sustainability in hyper-arid and semi-arid areas, such as Africa. Groundwater exploration in Africa's hyper-arid regions is challenging due to the complex geological and structural settings of basement aquifers (Wright 1992; Chilton and Foster 1995; Mohamaden and Ehab 2017; Ohenhen et al. 2023). In North Africa, the Precambrian basement rocks are part of the Arabian Nubian Shield (Said 1990; Hamimi et al. 2022), covering approximately 100,000 square kilometers of the total exposed rocks in Egypt (Fig. 1a, b). Evaluating groundwater potential in data-scarce Egypt remains the most challenging hydrogeological task, especially with a growing population (Chilton and Foster 1995; Ahmed and Abdelmohsen 2018; El-Rayes et al. 2020; Shebl et al. 2022).

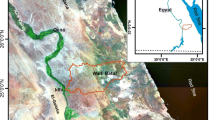
Location of the area under study in Egypt: a The global aridity map showing the location of Egypt (blue polygon) in the hyper-arid region (Kamerman 2020), b location map of the study area indicated by purple polygon in southeastern Egypt, also shown are the outcrops of the crystalline basement in Sinai and the Eastern Desert, and c Halayeb (Landsat-8 (RGB; 753)) with the main infrastructures, districts distribution, and blue symbols refer to productive groundwater wells (PGWs)
The potential for groundwater in crystalline basement rocks is influenced by secondary porosity, which is determined by the extent of fracturing in the rocks (Clark 1985; Gustafson and Krasny 1994; Edet and Okereke 1997; El-Rayes et al. 2020; Ikirri et al. 2023). Basement crystalline rocks, which consist of fractured bedrocks overlain by weathered horizons, retain a significant amount of groundwater (Lachassagne et al. 2014). Therefore, groundwater occurrence is notably unpredictable in rugged terrains, primarily appearing in weathered and fractured basement aquifers across various global regions (Courtois et al. 2010; Fashae et al. 2014; Lachassagne et al. 2021; Nyenje et al. 2022). Hydro-structural features, referred to as lineaments, influence surface runoff infiltration and act as pathways for groundwater movement and storage in the subsurface (Hung et al. 2005; Singhal 2008; Singhal and Gupta 2010; Chuma et al. 2013; Gaber et al. 2020; Araffa et al. 2023). In this context, lineament detection enables a better understanding of the role of structural features, such as joints and faults, in groundwater infiltration, accumulation, and retention in various environmental settings (e.g., Lattman and Parizek 1964; Magowe and Carr 1999; El-Rayes et al. 2020; Arnous et al. 2020; Mukherjee et al. 2020; Abu El-Magd and Embaby 2021; Masoud et al. 2022; Ikirri et al. 2023).
Geospatial technologies, such as remote sensing and Geographic Information Systems (GIS), are essential tools for mapping structural lineaments, especially when structural data is limited. Lineaments are visible as edges with different tonal patterns in satellite images. Therefore, the majority of extraction methods have been developed based on edge enhancement and line extraction techniques (Masoud and Koike 2006; Bruning et al. 2011; Díaz-Alcaide and Martínez-Santos 2019). Image enhancement techniques, such as band ratio, image fusion, and directional filters, improve the visibility of linear features, which can then be manually extracted as structural lineaments (Henderson et al. 1996; Lillesand and Kiefer 2000; Elmahdy et al. 2021). Lattman and Parizek (1964) pioneered groundwater prospecting by manually extracting linear features from stereo pairs of aerial photographs in the carbonate region and correlating their distance to productive wells. Automatic extraction techniques have effectively revolutionized the mapping of structural lineaments by detecting numerous structures compared to manual methods (e.g., Masoud and Koike 2006; Adhab and Hassan 2014; Hedayat et al. 2022).
Recently, satellite-based optical and radar platforms, including Landsat (5, 7, and 8), Sentinel-1/2, and Digital Elevation Model (DEM), have facilitated the objective and automatic extraction of lineaments at a regional scale (Mogaji et al. 2011; Shebl and Csáme 2021; Javhar et al. 2019).
Despite the effectiveness of multispectral imagery such as Landsat and Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER)-DEM for lineament mapping in arid areas (Masoud and Koike 2006; Mogaji et al. 2011; Shebl and Csáme 2021; El-Arafy et al. 2023), Sentinel-1 radar offers unique advantages in terms of penetration depth and all-weather capability, making it particularly promising for lineament mapping in environments. Monitoring structural lineaments is essential for groundwater exploration, but sensor performance evaluation is also necessary. Although optical Landsat, Shuttle Radar Topography Mission-Digital Elevation Modeling (SRTM-DEM), and Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER)-DEM imagery have been successfully utilized to generate lineament maps in arid areas (Masoud and Koike 2006; Mogaji et al. 2011; Shebl and Csáme 2021; El-Arafy et al. 2023). Sentinel-1 (S1) provides significant advantages over optical sensors for lineament mapping (Adiri et al. 2017). Furthermore, the current digital elevation model (DEM) created from Synthetic Aperture Radar (SAR) data (i.e., ALOS-1 DEM) was found to be more suitable than optical datasets for automatic lineament extraction (Shebl and Csáme 2021). Abasoh et al. (2022) recently developed a GIS-based method that integrated Landsat OLI, electrical resistivity, borehole, and morpho-structural data to identify the structural factors controlling fractured basement aquifers. While recent studies have integrated optical and radar data for lineament mapping in various settings (Javhar et al. 2019; Shebl and Csáme 2021; Jellouli et al. 2021; Ahmadi et al. 2023), their performance and reliability for groundwater potential assessment in urbanized semi-arid areas have not been extensively analyzed and remains largely unexplored. Consequently, additional research is required to explore the potential use of remote sensing multispectral imagery (such as Landsat 8 and ASTER-DEM) and radar imagery (such as Sentinel-1 and ALOS-DEM) to accurately delineate structural lineaments. This should be followed by a geo-electrical resistivity survey to assess their impact on the groundwater aquifers in these regions. Electrical resistivity is a prominent geophysical method for identifying near-surface structural features (Gemail et al. 2004; Gaber et al. 2020; Nur et al. 2021; Ibrahim et al. 2022) and reducing uncertainty in subsurface hydrogeological conditions (Youssef et al. 2020, 2021; Abu Salem et al. 2021).
Egypt, the third most populous country in Africa, is undergoing rapid urban development in its coastal provinces, with a population of approximately 109 million in 2021 (Youssef et al. 2022; UNDESA/PD 2022). However, surface freshwater resources, primarily sourced from the Nile River in Egypt, are limited and unevenly distributed to the arid frontier regions (Zeidan 2015; Ahmed and Abdelmohsen 2018). Anthropic pressure has also increased the reliance on groundwater in the cities along the Red Sea in Egypt, leading to unprecedented water scarcity due to the region's complex geology, arid conditions, and seawater intrusion (Zaghloul et al. 2012; Embaby et al. 2016). The Halayeb area, situated in the southernmost part of the South Eastern Desert (SED), is a bustling coastal region with mining, commercial, and industrial activities (Fig. 1c). Water availability is a significant challenge for urban development projects in this area, where it is sourced through pipelines from the Nile River or seawater desalination (Khalil 2014; Abd El-Moneim 2005). Only a limited number of studies have explored groundwater investigations for sustainable water supply in the area (e.g., EGSMA 1995; Elewa 2000; Embaby et al. 2016; Bedair et al. 2021). To address this gap, this study aims to assess the potential of multispectral, synthetic aperture radar (SAR), and digital elevation model (DEM) imagery for the automated detection of structural lineaments in the Halayeb area to support groundwater development. The integrated approach presented in this work utilizes optical (Landsat OLI), digital elevation models (ASTER and ALOS), and synthetic aperture radar (S1) data, along with geophysical data through a GIS environment to accomplish the following: (1) assess and validate the suitability of the newly remotely sensed data for accurate geological lineament extraction in the Halayeb frontier area, and (2) perform geostatistical analyses of their influence in combination with lithological and hydrogeological factors on groundwater conditions. This research aims to offer practical insights for mapping structural features that influence groundwater potential in similar frontier urban areas with limited geological data and/or restricted access. This will facilitate groundwater development.
Geological and structural settings of the study area
The Eastern Desert of Egypt, situated between the Red Sea and the Nile Valley, encompasses approximately 22% of Egypt's land area (Abd El-Moneim 2005; Rashed et al. 2020). The study area, bounded by the Red Sea mountain range to the west and north, extends along the coastal plain from Abu Ramad village to Halayeb city, encompassing a total area of 2577.48 square kilometers (Fig. 1b, c). Halayeb has a hyper-arid climate, with hot and humid summers (45°–50° C) and mild winters (ICARDA 2010; Rashed et al. 2020). The annual rainfall ranges from 2 to 150 mm/year (Khalil 2014; Embaby et al. 2016), while the humidity is high and varies from 28 to 52% (Hassanein et al. 2004).
Geomorphologically, the Halayeb area can be divided from west to east into six topographical units (Yousef et al. 2009): high terrain, isolated hills, piedmont, wadi alluvial deposits, scattered sand dunes, and coastal plain (Fig. 2a). The high elevated lands are located in the northwestern (Gabal El-Sallah), middle (Gabal Elba), southwestern (Gabal Shindib), southern (Gabal Shalal), and southeastern (Gebel Hadarba) parts of the study area. The Piedmont plain on the easternmost side is drained by numerous alluvial valleys that converge and form several main streams flowing toward the shoreline of the Red Sea.

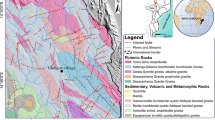
Geologically, the SED consists of complex crystalline rocks, Miocene sandstone rocks, and Quaternary sediments (Kusky and Ramdan 2003; Abdel-Razek et al. 2015; El-Kalioubi et al. 2020). See Figs. 1b and 2b). The crystalline Precambrian basement rocks, which are part of the Red Sea mountains, are predominantly located in the western and southern parts of the study area (see Fig. 1b). These include scattered hills of metasediments, metavolcanics, a metagabbro complex, older granitoids, acidic volcanic rocks, and younger granitoids accompanied by tonalite-granodiorite belts (Stern et al. 2020; Shahin et al. 2016). The Quaternary sandstone deposits lie in the eastern part of the study area, directly overlying the basement complex, forming a continuous belt of outcrops across the Eastern Desert (Elewa 2000; Abd El-Moneim 2005). The tectonic activities from the Red Sea and the Gulf of Suez have had a significant impact on the surface and subsurface structural framework of the study area (El-Bayoumi and Greiling 1984). According to Nano et al. (2002), the predominant fault systems in the SED include the Meridional trend (N–S), the Trans-African trend (NE–SW), the Syrian Arc trend (ENE-WSW), the Najd trend (WNW–ESE), the Gulf of Suez-Red Sea trend (NW–SE), and the Mediterranean Sea trend (E–W).
Hydrogeologically, the study area possesses a distinctive hydrological system with three groundwater aquifers: Miocene sandstone, Quaternary deposits, and fractured basement (Zaghloul et al. 2012; Embaby et al. 2016). The Miocene and Quaternary aquifer, which is affected by faults associated with dykes (see Fig. 3), serves as the shallow water source in the coastal plain of the SED (Abd El-Moneim 2005; Soussa et al. 2012). The aquifer is primarily made up of gravel, sand, and clay, confined within the mountain valleys and recharged only by sporadic rainfall. The fractured basement aquifer, a shallow and moderately saline aquifer found in alluvial wadis, serves as an additional source of recharge (EGSMA 1995). According to Zaki et al. (2019), the static groundwater level (SWL) exhibited a radial-divergent water table configuration with two axial domes in the elevated central region (see Fig. 3a).

Groundwater flow direction: a Static Groundwater Level (SWL) in the study area (modified after Zaki et al. 2019) and b Generalized geological cross-section shows Mesozoic and Quaternary layers overlying Precambrian basement rocks near the study area, extending from the Nile River to the Red Sea hills (RIGW 1988; Abd El-Moneim 2005)
Materials and methods
The methodology employed in this study consists of five steps: (1) establishing a GIS-based database for data input, (2) preprocessing the data to prepare base images, (3) using imagery processing techniques for automatic extraction of lineaments, (4) verifying the resultant lineament maps through quantitative and qualitative assessments (including ancillary and geophysical data), and (5) reassessing groundwater conditions using the optimal lineament map, along with lithological, structural, and hydrogeological factors. The systematic procedure followed in this integrated approach is illustrated in Fig. 4, which comprises various datasets depicted in the subsequent sections.

Flow chart showing the proposed approach in the present study
Data characteristics and preprocessing
The Halayeb GIS database was established for different digital images generated from available and ancillary datasets. The remotely sensed datasets available for the investigated area comprise a scene of multispectral Landsat 8 OLI (L8), a mosaic of two radiometrically terrain corrected (RTC) ALOS-DEM scenes, a scene of Sentinel-1A (S1A), and a mosaic of two ASTER-DEM scenes (Fig. 5 and Table 1). The georeferenced auxiliary data comprises published geological and geomorphological maps (CONOCO 1987; Abdel-Razek et al. 2015; Shahin et al. 2016), along with ground vertical resistivity measurements (Bedair et al. 2021). All digital images were rectified and co-registered to a unified projection (UTM-WGS1984- zone 36N) using the ArcGIS Pro 2.9 package.

Remote sensing datasets of the study area a Landsat OLI image denotes the false-colour composite (FCC) after the preprocessing step, b elevation map clipped from ASTER-DEM, c elevation map clipped from ALOS-DEM, d Sentinel-1 (S1A) VV polarization, and e S1A VH polarization
A cloud-free, L8 (path/row = 172/45) scene was obtained with a spatial resolution of 30 m for visible (blue, green, red), near-infrared, and two short infrared bands. The additional preprocessing of the L8 data, including radiometric normalization and atmospheric corrections (Fig. 5a), was performed for non-thermal bands using the calibration tools and the fast line-of-sight atmospheric adjustment of spectral hypercubes (FLAASH) scheme in ENVI 5.1 package (FLAASH 2009).
The ASTER-DEM has 1 arc-second product (30 m) spatial resolution obtained from NASA’s Earthdata open access platform accessed in September 2022 (Fig. 5b). ASTER project is accomplished by the Ministry of Trade, Economy and Industry of Japan and NASA to offer medium-resolution DEM. The ASTER-DEM scenes (ASTGTMV003_N22E036 and ASTGTMV003_N21E036) were mosaicked and clipped to the area outline (Fig. 5b). L8 and ASTER-DEM were downloaded through the U. S. Geological Survey (USGS) Earth Explorer database (https://earthexplorer.usgs.gov/).
Advanced Land Observing Satellite (ALOS)-1 was a mission of the Japan Aerospace Exploration Agency (JAXA) from 2006 to 2011. ALOS-1 is loaded with an active onboard Phased Array type L-band Synthetic Aperture Radar (PALSAR) sensor for all-weather, day-and-night observations, and repeat-pass interferometry (ASF 2015). A DEM from ALOS/PALSAR-1 with a spatial resolution of 12.5 m (acquired on 6 January 2009) was downloaded from NASA’s Alaska Satellite Facility (ASF). Two radiometrically terrain-corrected (RTC) radar images (AP_07582_FBD_F0580_RT1 and AP_07582_FBD_F0590_RT1) acquired in Fine Beam Single polarization mode (HH) were mosaicked to cover the entire study area (Fig. 5c).
A radar image of S1A was acquired in June 2021 using the Interferometric Wide Mode (IW) with a pixel spacing of 10 m × 10 m in a descending orbit. The image was captured with dual polarizations: Vertical transmit Vertical receive (VV) and Vertical transmit Horizontal receive (VH). The high-resolution S1A Ground Range Detected (GRD) scene was freely downloaded from the Alaska Satellite Facility website (see Fig. 5d and e). The Copernicus S1A satellite, equipped with an active onboard C-band SAR instrument, has generated georeferenced and multi-looked data under the European Space Agency (ESA)'s supervision. Further preprocessing techniques, such as applying the Orbit File, speckle filtering, radiometric calibration, eliminating thermal noise, Range-Doppler Terrain Correction, and conversion to dB, were implemented to reduce the disturbance in VV and VH S1A imaging. A Lee filter (3 × 3) was selected and applied to eliminate speckle noise (pepper phenomenon) from the S1A VV and VH images. This filter preserves the structures in the radar data by filtering the homogeneous areas and conserving their edges (Lee et al. 1999; Javhar et al. 2019). Lastly, the SRTM (Shuttle Radar Topography Mission) 1-arc second elevation data was used to perform geometric corrections on VV and VH images. The Sentinel-1 Toolbox (S1TBX) integrated into SNAP software 8, developed by the European Space Agency (ESA), was used to preprocess the S1A images.
Automatic lineament extraction
Remote sensing technology has revolutionized the field of hydrogeology by providing high spatial and spectral resolution data through satellite-borne optical and radar sensors. Lineament extraction relies on detecting tone contrasts, particularly by identifying surface features using edge detection. Therefore, improving the accuracy of lineament extraction requires enhancing spatial filtering by incorporating edge detection and filtering of improved spectral and elevation images (Masoud and Koike 2006; Javhar et al. 2019; El-Rayes et al. 2020). The principal component analysis (PCA) was used to process the non-thermal bands of the L8 image and generate principal component (PC) images, enhancing feature visibility. PCA compresses the correlated multivariable datasets of the original images through mathematical transformation into new principal component bands (Meijerink et al. 2007). Automatic lineament mapping from principal component 1 (PC1) is a widely used technique to delineate the primary structural trends that are significant for groundwater occurrence (Shebl and Csáme 2021). To identify linear features from the DEMs, four hillshade images were generated using four contrasting illumination directions (0°, 45°, 90°, and 135°) at a constant sun elevation angle of 30° using the ArcGIS Pro Spatial Analyst Hillshade tool.
Automatic lineament mapping was conducted using the LINE module algorithm of CATALYST PROFESSIONAL PCI Geomatica 2022 (currently known as Catalyst Professional). The input for the extraction process was a greyscale principal component 1 (PC1) of L8, S1A -VV, S1A -VH, and hill-shaded images produced from ASTER and ALOS-DEMs. Six parameters, including filter radius (RADI), edge gradient threshold (GTHR), curve length threshold (LTHR), line fitting error threshold (FTHR), angular difference threshold (ATHR), and linking distance threshold (DTHR), were necessary for extracting linear features and converting them into shapefile format. To ensure accurate automatic detection of geological lineaments, the default parameters were used for the proposed values in the literature, with the exception of the GTHR and ATHR, which were adjusted to 50 and 15, respectively (Table 2). These six parameter values were kept constant throughout the extraction process to prevent bias.
Postprocessing and validation
To validate the automatically extracted lineament maps from L8, ASTER-DEM, ALOS-DEM, and S1A VV and VH data and to ensure the reliability of the findings, a comprehensive assessment was carried out to specify the most precise geological lineaments. This involved a qualitative and statistical analysis of the distribution, length, and orientation of the automatically extracted lineaments. The following steps were used to validate the extracted lineament maps:
-
(1)
To focus exclusively on the geological lineaments within the study area, human-made linear features, such as roads, buildings, and agricultural lands, were excluded from consideration. This exclusion was accomplished using an official road layer and archived geologic maps (Fig. 6).
-
(2)
Statistical analysis was conducted to analyze the number and length of different extracted lineaments based on computations carried out in ArcGIS software. Furthermore, the rose diagram plots were produced for all extracted lineaments, representing the percentage of the total lineaments, and their directions were subsequently verified against digitized geological faults in the study area (Fig. 7). This was employed using the Rockworks V.22 software. Furthermore, the spatial correlation between different extracted lineaments and lithological units was examined by tabulating the length of lineaments against each rock type (Table 4).
-
(3)
A slope map represents the steepness per pixel within a raster, revealing lineaments as abrupt changes in the surface gradient (Adiri et al. 2017). Thus, the slope layer was extracted from a high-resolution ALOS-DEM image, and then classified into five classes using the natural breaks method (Fig. 8). The spatial correlation between different extracted linear features and slope gradient was quantitatively analyzed by tabulating the length of lineaments in each slope class of the classified ALOS slope map (Table 5).
-
(4)
At the local scale, a qualitative analysis visually verified extract lineaments against documented faults on geological maps, considering litho-structural characteristics. The details of geological maps were scanned, digitized and coloured-coded using ArcMap (Fig. 9). Subsequently, the PCA of the L8 transformation image was used to validate the lineaments in three selected sites, namely A, B, and C (Fig. 10).

Comparisons among automatically extracted lineaments from grayscale imageries of a Principal component analysis (PCA) in PC1 of Landsat OLI, b hillshade (0°–30°) of ASTER-DEM, c hillshade (45°–30°) of ASTER-DEM, d hillshade (0°–30°) of ALOS-DEM, e hillshade (45°–30°) of ALOS-DEM, and f VV and g VH of S1A, overlaid by the resulting extracted lineaments from each of them

Interpretive rosette diagram showing the orientations and the percentage of the total lineaments extracted from the a faults of geological map (CONOCO 1981), b PC-1 of Landsat OLI, c) hillshade (0°–30°) of ASTER-DEM, d hillshade (45°–30°) of ASTER-DEM, e hillshade (0°–30°) of ASTER-DEM, f hillshade (135°–30°) of ASTER-DEM, g VV and h VH polarizations of Sentinel-1, i hillshade (0°–30°) of ALOS-DEM, j hillshade (45°–30°) of ALOS-DEM, k hillshade (90°–30°) of ALOS-DEM, and l hillshade (135°–30°) of ALOS-DEM

Superposition of the obtained lineaments from a PC-1 of Landsat OLI, b hillshade (0°–30°) of ASTER-DEM, c hillshade (45°–30°) of ASTER-DEM, d hillshade (0°–30°) of ALOS-DEM, e hillshade (45°–30°) of ALOS-DEM, and f VV and g VH of S1A on the slope map of the study area obtained from ALOS-DEM

Superposition of the obtained lineaments from a PC-1 of Landsat OLI, b hillshade (0°–30°) of ASTER-DEM, c hillshade (45°–30°) of ASTER-DEM, d hillshade (0°–30°) of ALOS-DEM, e hillshade (45°–30°) of ALOS-DEM, and f VV and g VH of S1A on the official geological map (modified after CONOCO 1987) of the study area

Analysis of the reliability of lineaments extracted S1A VV that were considered features of interest. Image a shows FCC (RGB 752) of Landsat OLI, as a location map for the three selected test sites (the red polygon is Gabal El-Sallah, the blue polygon is Gabal Hadarba and the green polygon is Wadi Serimatai and b shows the digitized geological faults (CONOCO 1987) dropped over density map of S1A VV-derived lineaments. At site (A) in Gabal El-Sallah: c geological map (modified after Abdel-Razek et al. 2015), d Its PCA (RGB PC1, PC3, PC4) of Landsat OLI that distinguish lithologies, alteration zones, and structural features, and e VV polarizations of S1A image that shows strong backscattering (white colour) from the high land surfaces, such as hard terrain rocks, white low backscattering from the hidden paleochannel. At site (B): f Gabal Hadarba geological map (modified after Shahin et al. 2016), g Its PCA RGB (PC1, PC3, PC4), and h S1A VV image. At site (C) in Wadi Serimatai: i geological map (modified after EGSMA 1995), j Its PCA RGB (PC1, PC3, PC4) image, and k S1A VV image. Note that the geographical location of the tested site (Site No. C) for the geophysical survey in North Halayeib City shown in Fig. 10 is indicated by a yellow polygon. Note that yellow lineaments from S1A VV polarization were superimposed on all PCA images
Geospatial/geophysical data integration
Limited understanding of the interactions between lineaments and aquifers in coastal hard rock terrains poses a challenge to hydrogeological investigations, leading to significantly higher drilling costs. A geospatial autocorrelation was performed to analyze the relationship between the productive groundwater wells (PGWs) and lithological, structural, and hydrogeological factors using the Frequency Ratio (FR) to understand their impact on the hydrological conditions (Fig. 11 and Table 6). Lineament-stream intersections (LSI) are crucial for understanding the accumulation of groundwater (Ikirri et al. 2023). The Intersect tool in ArcGIS was utilized to extract intersection points between the optimal lineaments and streams. Structural factors, such as lineament density (LD) and Lineament Sinuosity Index (LSI), were calculated using the Kernel Density tool in ArcGIS. Furthermore, the ALOS-DEM data was utilized to extract the watersheds and maps of the natural drainage network. The spatial distribution of stream networks was determined using the eight-direction algorithm (D-8) in the Arc Hydro tool (O'Callaghan and Mark 1984), with a threshold value set at 2000 for estimated flow accumulations. The hydrogeological factors, including the distance to the stream (DTS), stream density (SD), and Topographic Wetness Index (TWI), were computed using the spatial analysis tool in ArcGIS Pro.

Comparison of extracted Lineaments S1A VV Polarization of S1A with delineated drainage networks from ALOS-DEM in the study area, a main watersheds were overlaid over L8 images, with the three selected sites, b natural drainage networks with stream order, while the inset rose diagram image display their main trending directions, c Distance to stream (DTS), d Stream density (SD), e Topographic Wetness Index (TWI) f lineaments density, and g lineaments and stream intersection density (LSI), displaying an outstanding match with productive groundwater wells (PGWs) sites
Vertical electrical sounding (VES) data were collected from previously published geophysical surveys (EGSMA 1995; Bedair et al. 2021) to minimize uncertainties in the automatically generated lineaments. The resistivity sounding measures the vertical changes in subsurface apparent electrical resistivity using four electrodes at the ground surface centered around a specific point (Loke and Barker 1996). Bedair et al. (2021) conducted measurements at 30 Schlumberger VES points with a maximum electrode spacing of 600 m. This setup was sufficient to investigate the geoelectrical layers down to a depth of 70 m, aiming to assess the groundwater potentiality in the area between Abu Ramad and Halayeb. Out of the Vertical Electrical Sounding (VES) measurements, 9 VES points were selected at a specific site (C) situated at the end of Wadi Sarara and Wadi Serimatai (Fig. 12a). Three subsurface cross-sections were developed in this area, taking into account the presence of linear features and surface topography (see Fig. 12b–d). The geoelectrical sections' elevation data was extracted from ALOS-DEM using Global Mapper 22.1. The geoelectrical sections were calibrated using the lithological information available from the Emberasieb well (Fig. 12b). In this study, geoelectrical sections were generated to illustrate the vertical and lateral variations in the true resistivity of different subsurface layers, aiding in the detection of any geological faults (Gemail et al. 2004; Ibrahim et al. 2022).

Layout of the geoelectrical survey showing: a the Location map of the selected study area (indicated on image with red label) in Halayeb area, b the Location of available DC resistivity sounding from Bedair et al. (2021) utilized to validate the extracted structural lineaments and c, d geoelectric cross sections (profiles A–A`, B–B`, and C–C`) show the lithological offsets (black dashed lines) along wadi Sarara and wadi Serimatai. Note that the subsurface faults deduced from the geophysical section C–C' are superimposed on Figure (b) as black dashed lines
Results and discussion
Lineaments analysis and statistics
Delineating lineaments is the initial step in defining the intricate groundwater potential in the crystalline terrain of the Halayeb frontier region. Remote sensing data provides spectral and spatial coverage of the study area, offering cost-effective information on the various factors that govern groundwater movement and occurrence (Koch and Mather 1997). The automated technique enables the extraction of lineaments from the post-processed PC1 L8, hillshade of 0° and 45° ASTER-DEM, hillshade of 0° and 45° ALOS DEM, and VV and VH S1A images using the parameters shown in Table 2. Subsequently, the lineament maps were overlaid on their respective grayscale sources (Fig. 6).
The PC1 L8 image yielded the lowest number of lineaments, while the ASTER-DEM hillshade products produced around 500 lineaments (Fig. 6a–c and Table 3). Moreover, the extracted lineaments from hillshade of (i.e., 0° and 45°) ASTER-DEM images (Fig. 6b and c) revealed less spatial distribution compared to those obtained from the SAR-based sensors, in this case: S1A and ALOS-DEM data. In this regard, ALOS-DEM is efficient, since its finer spatial resolution can identify comprehensive structural and geomorphological elements (Niipele and Chen 2019) along with lineaments elicitation through hillshade analysis (Figs. 6d and e). Among the hillshade of 0°, 45°, 90°, and 135° ALOS-DEM with the 30◦ altitudes, the 0° azimuth showed its superiority over the latter by extracting 4062 lineaments compared to 3852 for 135° azimuths (Table 3). Moreover, results clearly showed that the obtained lineaments from S1A VV and VH (Fig. 6f and g) images also surpass ALOS-DEM extracted lineaments, even though they have a similar resolution. Sentinel-1 outweighs all data in its superiority to extract lineaments, providing 4883 and 3787 lineaments from VV and VH of S1A images, respectively (Table 3 and Fig. 6f and g).
To resolve this inconsistency, interpretive rosette diagrams were prepared for each of the extracted lineament maps to identify their prominent orientations. The rose diagrams were constructed to show the orientations based on the percentage of the number of lineaments. When analyzing the orientation of detected lineaments from DEMs, the results clearly demonstrate the significant impact of azimuth on the orientation of the structural lineaments. For example, the extracted features from the 0° hillshade exhibit a predominant orientation in the east–west direction (Fig. 7c and i), while the features of the 45° hillshade appear in the northwest-southeast direction (Fig. 7d and j). This suggests that the predominant orientation of the lineaments varies with the azimuth angles, and as a result, at least eight azimuth maps are needed to obtain dependable results. The lineaments extracted from Sentinel-1 follow several directions, with most of the lineaments obtained from the VV polarization of S1A (Fig. 7g) displaying a preferential NE–SW direction, as well as the NNE–SSW, NW–SE, and E-W directions. These distinct directions are relatively similar to those obtained from the L8 (Fig. 7b) and align with the regional faults in the study area (Fig. 7a).
Validation of mapped lineaments
Validation is a critical step for mapping lineaments, especially in the field of hydrogeology (see Table 4). Table 4 shows the spatial correlation between the density of lineaments and the distribution of lithological units on the geological map. The information in Table 5 shows the percentage of lineament length (in meters) in different lithological units. Table 5 also shows the percentage of lineament length in each slope class. The geological map was overlaid with extracted linear features from different sensors. All observations show a high concentration of linear features in the central region, especially within the lithological unit comprising acidic volcanic, red granite, metasediments, and metavolcanic rocks, situated around G. Elba (see Fig. 9 and Table 4). The most prominent features extracted from the two polarizations of S1A and the hillshade of 0° and 45° ALOS-DEM images are present throughout the geological units of the study area (see Fig. 9d–g), with the VV image showing superiority in the areas that include wadi deposits and undifferentiated Quaternary sediments (Fig. 9f and Table 4). These findings were validated through spatial and statistical comparison of the lineaments with the ALOS slope map to improve the accuracy of all geological lineaments (Table 5). The extracted features from both DEMs were found in areas with steep slopes, while the features extracted from the PC1 image showed poor correlation with the high slope regions (Fig. 8a). This is because the lineaments identified in the PC1 image were primarily situated at the interfaces between elevated terrain and Quaternary features, which are found in areas with extremely steep slopes (Table 5). The hillshade of ASTER inaccurately detected the lineaments in the flat slope areas (Fig. 8b and c and Table 5); however, all SAR-based images successfully extracted these lineaments. The S1A VH and VV lineaments (see Fig. 8f and g) were primarily located in sloped areas, and even in regions with low slope values classified as flat surfaces (refer to Table 5). The VV polarization of the S1A image yields a significant number of lineaments in the flat area of Quaternary deposits due to its higher spatial characteristics (refer to Tables 3 and 4). Furthermore, Sentinel data was acquired during the dry summer season (Table 1), when soil moisture is low, and the study area consists of rugged terrain with no vegetation cover (Fig. 4a). This suggests that the radar sensors have the ability to penetrate near-surface elements in the flat eastern parts (Fig. 9f), where there are thin sedimentary covers, as compared to the optical and DEMs images (Gaber et al. 2017; Shebl and Csámer 2021). Javhar et al. (2019) also noted that the VH and VV data from S1A yield reliable results when compared to data from various optical sensors such as Sentinel-2, ASTER, and L8. This illustrates the effectiveness of S1A VV polarization in detecting areas with sudden changes in slope, regardless of soil properties, which is not achievable with optical and DEM images (Adiri et al. 2017).
To this end, the VV S1A lineament density map was used for spatial correlation analysis with previous geological information. The areas of a high lineament density coincide with the manually digitized faults identified in the literature (CONOCO 1987), see Fig. 10b. To comprehensibly validate the VV S1A linear structures using an automatic approach, a spatial analysis was accomplished with three detailed geological maps (EGSMA 1995; Abdel-Razek et al. 2015; Shahin et al. 2016) of Gabal El-Sallah (Fig. 10c), Gabal Hadarba (Fig. 10f), and Wadi Serimatai (Fig. 10i) areas, was applied. To judge the implementation of VV polarization in detecting lineaments, the extracted lineaments were dropped over L8 PCA, RGB PC1, PC3, and PC4, providing a closer view of the rock units, structures, and alteration zones (Fig. 10d, g, and j). A superior matching is observed between the location of VV S1A extracted lineaments and the digitized faults, alteration and shear zones on the geological maps, particularly in the G. El-Sallah and G. Hadarba, as shown in Fig. 10c–k. The lineaments obtained from the L8 image do not coincide with the alteration zones of the G. El-Sallah (i.e., test set A) and cannot fully represent the NE trending shear zones within the G. Hadarba area. Interestingly, the S1A VV images in this study reveal the presence of a buried paleo-drainage system from before the onset of Quaternary aridity (Fig. 10e), highlighting the impressive penetration capability of this imaging technique.
The central question in this research was to determine which sensor could provide a satisfactory lineament map. The current findings are consistent with prior observations by Adiri et al. (2017), Shebl and Csámer (2021), Javhar et al. (2019), and Villalta Echeverria et al., (2022), which compared multispectral optical and/or DEMs data with Sentinel-1 data. It is important to note that inaccuracies in automatically extracted lineaments are mainly associated with the use of the multispectral satellite (i.e., Landsat or ASTER) data, which could include linear features resulting from human-made structures, as observed in this study (Fig. 5a and b). While Shebl and Csámer (2021) highlighted the superiority of ALOS-DEM over Sentinal-1 data, this research demonstrates that the VV polarization of S1A offers better performance. Based on copious findings, Sentinel-1 images, specifically when using VV polarization, stand out as a highly effective choice for automatic lineament extraction at regional and local scales. This aligns with earlier studies by (Adiri et al. 2017; Ranjbari et al. 2022), emphasizing the superior performance of VV over VH polarization.
Integrated geospatial and geophysical data for groundwater development
Here, a geostatistical analysis aims to identify potential groundwater locations by examining the relationships between lithological, structural, and hydrogeological factors, as well as the potential groundwater sources (PGWs). Figure 11a shows seventeen distinct watersheds in the area. The largest watershed in the area is Wadi Serimatai. (See Table 6)) It is characterized by heavily dendritic stream patterns in the middle parts. These drainage systems originate from three elevated terrains with high stream orders and flow in north–south and northeast-southwest directions toward their respective outlets at the Red Sea (Fig. 11b). The streams within the remaining basins predominantly flow in four main directions: northeast (NE), north-northeast (NNE), northwest (NW), and east–west (E–W), as shown in Fig. 11b. These trends align with the orientations of the S1A -VV lineaments (Fig. 7g). FR values greater than 1 indicate a strong correlation between factor classes and the occurrence of PGWs in the study area, while FR values less than 1 imply a weak correlation (Abrams et al. 2018). The classes with no occurrences of PGWs exhibit a zero value for FR. The impact of DTS greater than 600 m is exceptionally low, but as the DTS decreases below 600, the FR gradually increases. Approximately 75.00% of PGWs occur within the range of 0 to 200 m, with the highest FR value being 1.63 (Fig. 11c and Table 6). Regarding the impact of stream density on PGWs occurrence (Fig. 11d), the category of SD with a density range of 4.1–6.6 km/Km2 exhibited the highest FR value (3.71), followed by the category with a density range of 3.1–4.1 km/Km2 with an FR value of 1.42 (Table 6). Another factor that influences groundwater potential is the topographic wetness index (TWI) (Fig. 11e), with the 2 (5.3–6.8) and 3 (6.9–9) classes showing positive impacts on the occurrence of productive groundwater wells (PGWs). The highest FR (2.84) values are observed in the last fifth (> 13) class. It is important to note that this significant class occupies only 6.25% of the study area (Table 6), and this could potentially influence the recharge process (Sun et al. 2022) and, consequently, the rate of hydrological response in the region (Mukherjee et al. 2020).
On the other hand, several factors influence groundwater flow, such as stress, roughness, fracture geometry, and fracture intersection (Moore et al. 2002; Singhal and Gupta 2010; Poufone et al. 2022). The LD and LSI maps were used to assess the influence of structural features per unit area. Results showed that LD classes 2 (0.37–0.81 km/km2), 3 (0.82–1.3 km/km2), and 4 (1.4–1.9 km/km2) had positive impacts on the occurrence of PGWs. Conversely, the first (< 0.36 km/km2) and last (2–3 km/km2) classes had the lowest FR values (Fig. 11f and Table 6). A higher LSI is associated with an increased likelihood of groundwater accumulation, which, in turn, can lead to a higher occurrence of PGWs (Poufone et al. 2022). The initial three LSI classes exhibited high FR values with densities between 0.16 and 0.68 km/Km2 (Table 6). However, classes 4 (0.69–1) and 5 (> 1) have the lowest FR value (Fig. 11g and Table 6). El-Rayes (2004) demonstrated that the groundwater accumulation and water well production tend to increase with rising lineament density. One plausible explanation for this relationship is that high LD (> 2 km/km2) increased rock permeability, providing potential pathways for rainfall recharge into groundwater, especially in the fractured Shindib, Elba, and Shalal mountain areas. In this regard, the wadi deposits had the highest FR (4.73) values, followed by the acidic rocks, metavolcanic, and undifferentiated deposits classes with FR values of 1.32, 1.13, and 1.1, respectively (Table 6). The findings mentioned above underscore the limited understanding resulting from individual efforts that have overlooked the significance of structural controls on groundwater potentiality in highly LSI areas.
Fortunately, Site (C) is characterized by high values of DD, LD, LSI, and stream order, indicating the presence of extensively fractured metasedimentary rocks intersecting with natural drainage pathways (Fig. 12). Regardless of the precision of lineament extraction, in-situ geophysical investigations will be necessary to reduce underground uncertainties. Many authors have conducted geophysical studies in the southern part of Egypt (Samir and Shib 1982; EGSMA 1995; Shawky et al. 2012; Embaby et al. 2015; Mohamaden and Ehab 2017). Unfortunately, there were no geophysical measurements, such as gravity, magnetic, seismic, and water well logs, available for the study area. Three geoelectrical profiles were conducted along the Wadi Sarara and Wadi Serimatai areas (see Fig. 12a). Two profiles (A–A` and B–B`) oriented perpendicular to the shoreline were taken from Bedair et al. (2021), while the C–C` profile was reconstructed parallel to the shoreline to analyze the geometry of shallow geological structures (see Fig. 12b). The geoelectrical sections revealed four subsurface layers, including two primary shallow groundwater aquifers: Quaternary-Miocene sandstone and fractured basements (Fig. 12c–e). The uppermost layer, characterized by relatively high resistivity values in all profiles, consists of thin wadi sediments (gravels, sands, and debris). The second and third geoelectrical layers correspond to the Quaternary alluvium and Miocene sandstone deposits, respectively. The third layer of sandstone is extensively dissected by several faults and tends to slope downward in the alluvial fan of Wadi Sarara, serving as the primary water-bearing aquifer (see Fig. 12b). Regrettably, the western coasts of the Red Sea are highly susceptible to sea level rise (Hereher 2015), which affects the water levels in the coastal aquifers (Abd El-Moneim 2005; Embaby et al. 2016). The C–C` profile exhibited a concave structure in the central section, ranging from 2000 to 4500 m, and extending downward to the base (Fig. 12e). Figure 12b displays the inferred subsurface horst faults (F-1 and F-2) as dashed black lines superimposed on the image (Fig. 12b). The faults are visible in the eastern part of the C–C' profile, followed by an area bounded by a subsurface fault (F-3), indicating a graben structure. This structure primarily determines the flow direction of the alluvial channel in the NE-SW direction (Fig. 12e). The geophysical observations provided strong evidence supporting the extension of subsurface faults from fractured basement rocks to near-surface layers, specifically the Miocene-Quaternary aquifers, exhibiting orientations in the NE-SW and NNE-SSW directions (see Figs. 7g and 12b). Many of the features identified by S1A (VV) align with the underlying subsurface faults in this region. The fourth geoelectric layer corresponds to the tonalite-granodiorite rocks (Fig. 10i), which form a fractured metavolcanic aquifer with thicknesses ranging from 22 to 50 m. The fractured basement aquifer is located at a shallower depth near VES 1 and 4 but deepens towards the northeastern regions, marking the end of the Sarara and Serimatai valleys (Fig. 12c and d). Consistent with this finding, the fractured basement aquifer in the Shalatein area, north of the Halayeb region, was observed at shallow depths along the Red Sea with moderate salinity (EGSMA 1995; Shawky et al. 2012). Regarding groundwater flow, the static water level (SWL) indicated a horizontal movement of groundwater from the western to eastern regions through the fractured basement aquifer (Embaby et al. 2016; Zaki et al. 2019), as shown in Fig. 3a. The orientation of lineaments can indeed influence the movement of groundwater by providing pathways for the flow of water (Mohamed et al. 2015).
In conclusion, the identified structural elements in the area play a dual role and can be significant factors in groundwater confinement. These findings were reinforced by geophysical observations, providing further evidence that the area's natural drainage networks are under structural control. Within similar geological settings, structural faults, joints, and shear zones play an influential role in the weathering process, and ultimately groundwater recharge and accumulation.
Conclusion
Hydrogeological investigations encounter challenges due to a limited understanding of how geological lineaments impact different groundwater aquifers in coastal hard rock terrains. Neglecting the potential influence of structural lineaments on groundwater aquifers led to significantly higher drilling costs in the frontier Halayeb region of Southeast Egypt. This study effectively identified structural lineaments by analyzing various spaceborne multispectral imagery (Landsat 8 and ASTER-DEM) and SAR imagery (Sentinel-1 and ALOS-DEM) using GIS techniques. The results were statistically confirmed using lithological, geological, hydrogeological, and geoelectrical data. Subsequently, the impact of the optimal lineaments on groundwater conditions was assessed.
The results demonstrated that the lineaments extracted from optical-based exhibited less spatial distribution compared to those obtained from SAR-based sensors, in this case: S1A and ALOS-DEM data. S1A surpasses all other data sources in its ability to extract lineaments, yielding 4883 and 3787 lineaments from the VV and VH polarizations, respectively. Unfortunately, ALOS-DEM lineaments change orientation with azimuth angles, requiring at least eight azimuth maps for reliable results. The S1A VV lineaments predominantly exhibit an NE–SW direction, along with NNE–SSW, NW–SE, and E-W directions, which correspond to the regional geological faults in the study area. Geostatistical analysis revealed that the distribution of PGWs versus lithological, structural, and hydrogeological factors supported the significant role of drainage systems in groundwater occurrences. The S1A VV lineaments matched the faults, alteration, and shear zones on the geological maps better than the obtained L8 lineaments at three locally selected sites. Site (C), located in the flat coastal areas of Wadi Serimatai, shows high values of DD, LD, and LSI, indicating the presence of extensively fractured metasediment rocks intersected by natural drainage pathways. S1A VV lineaments—outperforming other sensors—effectively detected buried hard rock terrains under thin sedimentary covers in this site. The geoelectrical sections also provided strong evidence that subsurface faults extend from fractured basement aquifers to near-surface aquifers, aligning with the intrinsic S1A VV lineaments with NE-SW and NNE-SSW orientations.
Ultimately, employing a multidisciplinary approach that integrates space-borne (multispectral, DEM, and radar), GIS, and geophysical datasets to map structural lineaments is an innovative method for evaluating the significance of lineaments in groundwater development and management in hard rock terrains. This research represents the first integrated approach to extracting lineaments in the Halayeb area, providing valuable insights for groundwater exploration. By understanding the relationship between the density of lineaments and the occurrence of potential groundwater sources (PGWs), groundwater managers can better identify promising areas for groundwater. To further advance water resource management, it is recommended to conduct GIS-based modeling to assess groundwater potential. This should consider both the presence and absence of productive groundwater wells (PGWs), followed by geophysical surveys, including aeromagnetic, gravity, and electric resistivity tomography. These surveys can offer more profound insights into the hydrogeological characteristics of the study area and improve our understanding of the role of subsurface structural settings in groundwater potential. This study aims to provide practical insights for mapping structural features that influence groundwater potential in similar frontier urban areas with limited geological data and/or restricted access, thereby facilitating groundwater development.
Data availability
The data that support these findings and results of the current study are available, upon reasonable request.
References
Abasoh ME, Victor KJ, Pierre W, Anoh NO, Jude PN, Roosvelt DMM, Tabod TC (2022) Hydrogeological mapping from Landsat 8, SRTM images, vertical electrical soundings and hydraulic parameters of aquifers: case study of the South Western part of Baleng Watershed. Res Geophys Sci. https://doi.org/10.1016/j.ringps
Abd El-Moneim AA (2005) Overview of the geomorphological and hydrogeological characteristics of the Eastern Desert of Egypt. Hydrogeol J 13:416–425
Abdel-Razek YA, Masoud MS, Hanafi MY et al (2015) Study of the parameters affecting radon gas flux from the stream sediments at Seila area Southeastern desert, Egypt. Environ Earth Sci 73:8035–8044. https://doi.org/10.1007/s12665-014-3958-2
Abrams W, Ghoneim E, Shew R, LaMaskin T, Al-Bloushi K, Hussein S, AbuBakr M, Al-Mulla E, Al-Awar M, El-Baz F (2018) Delineation of groundwater potential (GWP) in the northern United Arab Emirates and Oman using geospatial technologies in conjunction with simple additive weight (SAW), analytical hierarchy process (AHP), and probabilistic frequency ratio (PFR) techniques. J Arid Environ 157:77–96
Abu El-Magd SA, Embaby A (2021) To investigate groundwater potentiality, a GIS-based model was integrated with remote sensing data in the Northwest Gulf of Suez (Egypt). Arab J Geosci 14:2737. https://doi.org/10.1007/s12517-021-08396-2
Abu Salem HA, Gemail SK, Nosair A (2021) A multidisciplinary approach for delineating wastewater flow paths in shallow groundwater aquifers: a case study in the southeastern part of the Nile Delta, Egypt. J Contam Hydrol 236:103701
Adhab SS, Hassan MA (2014) Lineament automatic extraction analysis for Galal Badra river basin using Landsat 8 satellite image. Iraqi J Phys 12:44–55
Adiri Z, El Harti A, Jellouli A, Lhissou R, Maacha L, Azmi M, Zouhair M, Bachaoui EM (2017) Comparison of Landsat-8, ASTER and Sentinel 1 satellite remote sensing data in automatic lineaments extraction: a case study of Sidi Flah- Bouskour inlier. Moroc Anti Atlas Adv Sp Res 60:2355–2367
Ahmadi H, Pekkan E, Seyitoğlu G (2023) Automatic lineaments detection using radar and optical data with an emphasis on geologic and tectonic implications: a case study of Kabul Block, eastern Afghanistan. Geocarto Int 38:1
Ahmed M, Abdelmohsen K (2018) Quantifying modern recharge and depletion rates of the Nubian Aquifer in Egypt. Surv Geophys 39:729–751
Alaska Satellite Facility (ASF) (2015) ASF radiometrically terrain corrected ALOS PALSAR products product guide. https://www.asf.alaska.edu/sar-information/alos-palsar-documents-tools. Accessed 1 Aug 2018
Araffa SAS, Hamed HG, Nayef A et al (2023) Assessment of groundwater aquifer using geophysical and remote sensing data on the area of Central Sinai, Egypt. Sci Rep 13:18245. https://doi.org/10.1038/s41598-023-44737-9
Arnous MO, El-Rayes AE, Geriesh MH et al (2020) Groundwater potentiality mapping of the tertiary volcanic aquifer in IBB basin, Yemen by using remote sensing and GIS tools. J Coast Conserv 24:27
Bakenaz AZ (2015) Water conflicts in the Nile River Basin: impacts on Egypt water resources management and road map. https://doi.org/10.13140/RG.2.1.4414.3849
Bedair S, Abdel-Raouf O, Meneisy AM (2021) Combined GPR, DC resistivity, and hydrogeochemical data for hydrogeological exploration: a case study at the Red Sea coast. Arab J Geosci 14:727. https://doi.org/10.1007/s12517-021-07039-w
Bruning JN, Gierke JS, Maclean AL (2011) An approach to lineament analysis for groundwater exploration in Nicaragua. Photogramm Eng Remote Sens 77:509–519
Chilton PJ, Foster SSD (1995) Hydrogeological characterization and water-supply potential of basement aquifers in tropical Africa. J Hydrogeol 3(1):36–49
Chuma C, Orimoogunje OOI, Hlatywayo DJ, Akinyede JO (2013) Application of remote sensing and geographic information systems in determining the groundwater potential in the crystalline basement of Bulawayo Metropolitan area, Zimbabwe. Adv Remote Sens 2:149–161
Clark L (1985) Groundwater abstraction from basement complex areas of Africa. Q J Eng Geol 18:25–34
Conoco (1987) Geological map of Egypt, scale 1:500,000-NF 36 NE-Bernice, Egypt. The Egyptian General Petroleum Corporation, Cairo, Egypt
Courtois N, Lachassagne P, Wyns R, Blanchin R, Bougaïré FD, Somé S, Tapsoba A (2010) Large-scale mapping of hard-rock aquifer properties applied to Burkina Faso. Groundwater 48:269–283
Díaz-Alcaide S, Martínez-Santos P (2019) Review: advances in groundwater potential mapping. Hydrogeol J 27:2307–2324
Edet AE, Okereke CS (1997) Assessment of hydrogeological conditions in basement aquifers of the Precambrian Oban Massif, Southeastern Nigeria. J Appl Geophys 36:195–204
EGSMA (1995) Geological, geomorphological and geophysical studies for groundwater exploration in the area between Halayeb and Shalateen, Eastern Desert, Egypt. Internal Report
El-Arafy RA, Shawky MM, Mahdy NM et al (2023) Using Edge detection techniques and machine learning classifications for accurate lithological discrimination and structure lineaments extraction: a comparative case study from Gattar area, Northern Eastern Desert of Egypt. Arab J Geosci 16:619. https://doi.org/10.1007/s12517-023-11732-3
El-Bayoumi RMA, Greiling RO (1984) Tectonic evolution of a Pan-African plate margin in Southeastern Egypt – a suture zone over printed by low angle thrusting. In: Klerkx J, Michot J (eds) African geology. Tervuren, Belgium, pp 47–56
Elewa H (2000) Hydrogeology and hydrological studies in Halaib Shalatin area, Egypt, using remote sensing technology and other techniques. Ph.D. Thesis, Ain Shams University, Cairo, p 282
El-Kalioubi B, Fowler AR, Abdelmalik K (2020) The metamorphism and deformation of the basement complex in Egypt. The geology of Egypt. Springer, Berlin, Heidelberg, Germany, pp 191–252
Elmahdy SI, Mohamed MM, Ali TA (2021) Automated detection of lineaments express geological linear features of a tropical region using topographic fabric grain algorithm and the SRTM DEM. Geocarto Int 36:76–95
El-Rayes AE (2004) Use of lineament analyses and joint measurements as guides for drilling high yield water wells in the basement aquifer of south Sinai, Egypt. J Pet Min Eng 7(1):67–76
El-Rayes AE, Omran A, Geriesh M et al (2020) Estimation of hydraulic conductivity in fractured crystalline aquifers using remote sensing and field data analyses: an example from Wadi Nasab area, South Sinai, Egypt. J Earth Syst Sci 129:203
Embaby AI, Razack M, Porel G (2015) Geophysical investigations to highlight hard rocks aquifers structure in the South Eastern Desert, Egypt. In: Sixth Int. Conf. Wat. Res. Sust. Dev. ENSH, Algers
Embaby AI, Razack M, Lecoz M, Porel G (2016) Hydrogeochemical assessment of groundwater in the Precambrian rocks, South Eastern Desert, Egypt. J Water Resour Prot 8:293–310. https://doi.org/10.4236/jwarp.2016.83025
Fashae OA, Tijani MN, Talabi AO et al (2014) Delineation of groundwater potential zones in the crystalline basement terrain of SW-Nigeria: an integrated GIS and remote sensing approach. Appl Water Sci 4:19–38. https://doi.org/10.1007/s13201-013-0127-9
FLAASH Users Guide (2009) Atmospheric Correction Module. QUAC and FLAASH Users Guide, Version 4.7.ITT Visual Information Solutions Inc
Gaber A, Amarah BA, Abdelfattah M, Ali S (2017) Investigating the use of the dual-polarized and large incident angle of SAR data for mapping the fluvial and aeolian deposits. NRIAG J Astron Geophys 6(2):349–360
Gaber A, Mohamed AK, ElGalladi A, Abdelkareem M, Beshr AM, Koch M (2020) Mapping the ground-water potentiality of West Qena Area, Egypt, using integrated remote sensing and hydro-geophysical techniques. Remote Sens 12(10):1559
Gemail Kh, Samir A, Chr O, Mousa SE, Ibrahim Sh (2004) Study of saltwater intrusion using 1D, 2D and 3D resistivity surveys in the coastal depressions at the eastern part of Matruh area, Egypt. Near Surf Geophys 2:101–107
Gustafson G, Krasny J (1994) Crystalline rock aquifers: their occurrence, use and importance. Appl Hydrogeol 2:64–75
Hamimi Z, Hagag W, Fritz H, Baggazi H, Kamh S (2022) The tectonic map and structural provinces of the late neoproterozoic Egyptian Nubian shield: implications for crustal growth of the Arabian-Nubian Shield (East African Orogen). Front Earth Sci 10:921521
Hassanein AK, Grais YL, Behiry EMK, Khider MH (2004) Origin, mode of formation of uniformity studies on soils of some physiographic units of Halaib and Shalateen area, Egypt. Zag J Agric Res 31(4B):1677–1698
Hedayat B, Ahmadi ME, Nazerian H, Shirazi A, Shirazy A (2022) Feasibility of simultaneous application of fuzzy neural network and TOPSIS integrated method in potential mapping of lead and zinc mineralization in Isfahan-Khomein metallogeny zone. Open J Geol 12:215–233
Henderson DB, Ferrill DA, Clarke KC (1996) Mapping geological faults using image processing techniques applied to hill-shaded digital elevation models. IEEE Trans 8:240–245
Hereher M (2015) Assessment of Egypt’s Red Sea coastal sensitivity to climate change. Environ Earth Sci 74:2831–2843
Hung LQ, Batelaan O, De Smedt F (2005) Lineament extraction and analysis, comparison of LANDSAT ETM and ASTER imagery.Case study of Suoimuoi tropical karst catchment, Vietnam. In: Ehlers M, Michel U (eds) Remote sensing for environmental monitoring, GIS applications and Geology, Proc. of SPIE, 5983 59830T. 12
Ibrahim A, Gemail KS, Bedair S et al (2022) An Integrated approach to unravel the structural controls on groundwater potentialities in hyper-arid regions using satellite and land-based geophysics: a case study in southwestern desert of Egypt. Surv Geophys. https://doi.org/10.1007/s10712-022-09755-8
ICARDA (International Center for Agricultural Research in the Dry Areas) (2010) Map of West Asia and Egypt, Absolute change of annual aridity index 2010–2040/current climate
Ikirri M, Boutaleb S, Ibraheem IM, Abioui M, Echogdali FZ, Abdelrahman K, Id-Belqas M, Abu-Alam T, El Ayady H, Essoussi S et al (2023) Delineation of groundwater potential area using an AHP, remote sensing, and GIS techniques in the Ifni Basin, Western Anti-Atlas, Morocco. Water 15(7):1436. https://doi.org/10.3390/w15071436
Javhar A, Chen X, Bao A, Jamshed A, Yunus M, Jovid A, Latipa T (2019) Comparison of multi-resolution optical Landsat-8, Sentinel-2 and radar Sentinel-1 data for automatic lineament extraction: a case study of Alichur Area, SE Pamir. Remote Sens 11(7):778. https://doi.org/10.3390/rs11070778
Jellouli A, El Harti A, Adiri Z, Chakouri M, El Hachimi J, BachaouiEM, (2021) Application of optical and radar satellite images for mapping tectonic lineaments in kerdous inlier of the Anti-Atlasbelt, Morocco. Remote Sens Appl 22:100509
Kamerman P (2020) Using raster data to calculate and then map aridity indices. https://www.painblogr.org/2020-12-15-climate-change. Accessed 15 Dec 2020
Khalil MH (2014) Detection of magnetically susceptible dyke swarms in a fresh coastal aquifer. Pure Appl Geoph 171:1829–1845
Koch M, Mather PM (1997) Lineament mapping for groundwater resource assessment: a comparison of digital synthetic aperture imagery (SAR) and stereoscopic large format camera photographs (LFC) in the Red Sea hills, Sudan. Int J Remote Sens 18:1465–1482
Kusky TM, Ramdan TM (2003) Structural controls on Neoproterozoic mineralization in the southeastern Desert, Egypt: an integrated field, Landsat TM and SIR-C/X SAR approach. J Afric Earth Sci 35:107–121
Lachassagne P, Dewandel B, Wyns R (2014) The conceptual model of weathered hard rock aquifers and its practical applications. Fractured rock hydrogeology. CRC Press, Boca Raton, FL, pp 13–46
Lachassagne P, Dewandel B, Wyns R (2021) Review: hydrogeology of weathered crystalline/hard-rock aquifers—guidelines for the operational survey and management of their groundwater resources. Hydrogeol J 29:2561–2594
Lattman LH, Parizek RR (1964) Relationship between fracture traces and occurrence of groundwater in carbonate rocks. J Hydrol 2:73–91
Lee JS, Grunes MR, De Grandi G (1999) Polarimetric SAR speckle filtering and its implication for classification. IEEE Trans Geosci Remote Sens 37(5):2363–2373
Lillesand TM, Kiefer RW (2000) Remote sensing and image interpretation, 4th edn. Wiley, NY, pp 884–894
Loke MH, Barker RD (1996) Rapid least-squares inversion of apparent resistivity pseudo-sections by a quasi-Newton method. Geophys Prospect 44:131–152
Magowe M, Carr JR (1999) Relationship between lineaments and groundwater occurrence in western Botswana. Ground Water 37(2):282–286
Masoud A, Koike K (2006) Tectonic architecture through Landsat-7 ETM/SRTM DEM derived lineaments and relationship to the hydrogeologic setting in Siwa Region, NW Egypt. J Afr Earth Sc 45:467–477
Masoud AM, Pham QB, Alezabawy AK, Abu El-Magd SA (2022) Efficiency of geospatial technology and multi-criteria decision analysis for groundwater potential mapping in a semi-arid region. Water 14:882. https://doi.org/10.3390/w14060882
Meijerink AMJ, Bannert D, Batelaan O, Lubczynski MW, Pointet T (2007) Remote sensing application to groundwater. United Nations Educational, Scientific and Cultural Organization Publ. Co, Saint-Denis, Paris, France, p 309
Mogaji KA, Aboyeji OS, Omosuyi GO (2011) Mapping of lineaments for groundwater targeting in basement complex region of Ondo state, Nigeria, using remote sensing and geographic information system (GIS) techniques. Int J Water Resour Environ Eng 3(7):150–160
Mohamaden MII, Ehab D (2017) Application of electrical resistivity for groundwater exploration in Wadi Rahaba, Shalateen, Eqypt. NRIAG J Astron Geophys 6(1):201–209
Mohamed L, Sultan M, Ahmed M et al (2015) Structural controls on groundwater flow in basement terrains: geophysical, remote sensing, and field investigations in Sinai. Surv Geophys 36:717–742. https://doi.org/10.1007/s10712-015-9331-5
Moore RB, Schwarz GE, Clark SF. Jr, Walsh GJ, Degnan JR (2002) Factors related to well yield in the fractured bedrock aquifer of New Hampshire. U.S. Geological Survey Professional Paper 1660. p 51
Mukherjee A, Guo H, Langan S, Mckenzie A, Aureli A (2020) Global groundwater: Source, scarcity, sustainability, security, and solutions. Elsevier, Amsterdam, p 637
Nano L, Kontny A, Sadek MF, Greiling RO (2002) Structural evolution of metavolcanics in the surrounding of the gold mineralization at El Beida, South Eastern Desert, Egypt. Ann Geol Surv Egypt XXV:11–22
Niipele JN, Chen J (2019) The usefulness of alos-palsar dem data for drainage extraction in semi-arid environments in the Lishana sub-basin. J Hydrol Reg Stud 21:57–67
Nur A, Taiyib A, Nggada IS (2021) Hydro-geoelectrical study for groundwater potential of Lassa and environs, North Eastern Nigeria. Eur J Environ Earth Sci 2(5):18–23
Nyenje PM, Ocoromac D, Tumwesige S et al (2022) Hydrogeology of an urban weathered basement aquifer in Kampala, Uganda. Hydrogeol J 30:1469–1487. https://doi.org/10.1007/s10040-022-02474-9
O’Callaghan J, Mark D (1984) The extraction of drainage networks from digital elevation data. Comput vis Graph Image Process 28:323–344
Ohenhen LO, Mayle M, Kolawole F, Ismail A, Atekwana EA (2023) Exploring for groundwater in sub-Saharan Africa: insights from the integrated geophysical characterization of a weathered basement aquifer system, central Malawi. J Hydrol Reg Stud 47:101433. https://doi.org/10.1016/j.ejrh.2023.101433
Poufone YP, Melii JL, Aretouyap Z, Gweth MMA, Nguemhe Fils SC, Nshagali Biringanine G, Oyoa V, Perilli N, Njandjock Nouck P (2022) Possible pathways of seawater intrusion along the Mount Cameroon coastal area using remote sensing and GIS techniques. Adv Space Res 69(5):2047–2060
Ranjbari M, Vagheei R, Salehi H (2022) Integration of Landsat-8 and Sentinel-1 dataset to extract geological lineaments in complex formations of Tepal mountain area, Shahrood, north Iran. Adv Space Res 71(1):936–945
Rashed HAS, Hassan FO, Abdel Salam AA, Faid AM (2020) Assessment of groundwater quality for different aquifers in Halaib and Shalatein area at South Eastern Desert of Egypt. J Soil Sci Agric Eng 11(6):203–2014
RIGW (1988) Hydrogeological map of Egypt. Scale 1, 2000,000. User guide, Ministry of Irrigation, Cairo, Egypt
Said R (1990) The geology of Egypt. A. A. Balkema, Rotterdam, Brookfield, p 734
Samir A, Shib AH (1982) Geophysical exploration for groundwater at Wadi Lahami, South Eastern Desert, Egypt. Ann Geol Surv Egypt 12:185–191
Shahin HA, Masoud S, Bayoumi M (2016) Geology, geochemistry and radioactivity of granitic and volcanic rocks at Hadarba area, South Eastern Desert, Egypt. Int Res J Geol Min 6(2):038–052
Shawky HA, Said MM, El-Aassar AM, Kotp YH, Abdel Mottaleb MSA (2012) Study the chemical characteristics of groundwater to determine the suitable localities desalination processes in the area between Marsa Alam and Ras Banas, Red Sea Coast Eastern Desert, Egypt. J Am Sci 8(11):93–106
Shebl A, Csamer A (2021) Reappraisal of DEMs, Radar and optical datasets in lineaments extraction with emphasis on the spatial context. Remote Sens Appl Soc Environ 100617:1–12. https://doi.org/10.1016/j.rsase.2021.100617
Shebl A, Abdelaziz MI, Ghazala H, Araffa SAS, Abdellatif M, Csámer Á (2022) Multi-criteria groundwater potentiality map-ping utilizing remote sensing and geophysical data: a case study within Sinai Peninsula, Egypt. Egypt J Remote Sens Sp Sci 25(3):765–778. https://doi.org/10.1016/j.ejrs.2022.07.002
Singhal BBS (2008) Nature of hard rock aquifers, hydrogeological uncertainties and ambiguities. In: Shakeel A, Ramaswamy J, Abdin S (eds) Groundwater dynamics in hard rock aquifers. Springer, Dordrecht (ISBN 978-1-4020-6540-8)
Singhal BBS, Gupta RP (2010) Applied hydrogeology of fractured rocks, 2nd edn. Springer, NY
Soussa H, El Feel AA, Alfy SZ, Yousif MSM (2012) Flood hazard in Wadi Rahaba area, Egypt. Arab J Geosci 5:45–52
Stern RJ, Ali K, Hamimi Z, El-Barkooky A, Martínez Frías J, Fritz H et al (2020) “Crustal evolution of the Egyptian precambrian rocks”, in the Geology of Egypt. Regional Geol Rev 131–151. https://doi.org/10.1007/978-3-030-15265-9_4
Stern RJ, Kroner A, Bender R, Reischmann T, Dawoud AS (1994) Precambrian basement around Wadi Hafafit, Sudan: a new perspective on the evolution of the East Saharan Creton. Geol Rundsch 83:564–577
Sun T, Cheng W, Abdelkareem M, Al-Arifi N (2022) Mapping prospective areas of water resources and monitoring land use/land cover changes in an arid region using remote sensing and GIS techniques. Water 14:2435. https://doi.org/10.3390/w14152435
Villalta Echeverria MDP, Viña Ortega AG, Larreta E, Romero Crespo P, Mulas M (2022) Lineament extraction from digital terrain derivate model: a case study in the Girón-Santa Isabel Basin, South Ecuador. Remote Sens 14(21):5400
Wright EP (1992) The hydrogeology of crystalline basement aquifers in Africa. Geol Soc Spec Publ 66(1):1–27
Yousef AF, Salem AA, Baraka AM, Aglan OS (2009) The impact of geological setting on the groundwater occurrences in some Wadis in Shalatein – Abu Ramad Area, South Eastern Desert, Egypt. Eur Water Pub (EWRA) 25(26):53–68
Youssef YM, Sugita M, Gemail KS, Saada SA, Tama MA, AlBarqawy M (2020) An integrated GIS and Geophysical-based approach for geohazards risk assessment in coastal region: a case study in Suez city, Egypt. Earth Space Sci Open Arch. https://doi.org/10.1002/essoar.10506623.1
Youssef YM, Gemail KS, Sugita M, Albarqawy M, Teama MA, Koch M, Saada SA (2021) Natural and anthropogenic coastal environmental hazards: an integrated remote sensing, GIS, and geophysical-based approach. Surv Geophys 42:1109–1141. https://doi.org/10.1007/s10712-021-09660-6
Youssef Y, Gemail KS, Sugita M, Saada SA, Teama MA, AlBarqawy M, Abdelaziz E, Fares K (2022) Multi-temporal analysis of coastal urbanization and land cover changes in Suez City Egypt, using remote sensing and GIS. Front Sci Res Technol. https://doi.org/10.21608/FSRT.2022.132752.1061
Zaghloul EA, Ismail AAH, Hassan HBA, El-Gebaly MR (2012) Egyptian needs and the water resources under the agreements among the Nile River Basin countries. Aust J Basic Appl Sci 6(4):129–136
Zaki S, Masoud AM, Redwan M, Abdel Moneim AA (2019) Chemical characteristics and assessment of groundwater quality in Halayieb area, southeastern part of the Eastern Desert, Egypt. Geosci J 23(1):149
Zeidan BA (2015) Water conflicts in the Nile River Basin: impacts on Egypt water resources management and road map. Rev Article. https://doi.org/10.13140/RG.2.1.4414.3849
Acknowledgements
The authors would like to thank USGS Glovis and Alaska facility for providing the Landsat, ASTER, ALOS-1, and Sentinel 1A datasets.
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB). Authors confirm No external funding.
Author information
Authors and Affiliations
Contributions
SAAE-M, YMY, and AE: Conceptualization, methodology, Writing- original draft, Formal analysis, Visualization, Review, and editing.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Ethical approval
“All authors have read, understood, and have complied as applicable with the statement on "Ethical responsibilities of Authors".
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Embaby, A., Youssef, Y.M. & Abu El-Magd, S.A. Delineation of lineaments for groundwater prospecting in hard rocks: inferences from remote sensing and geophysical data. Environ Earth Sci 83, 62 (2024). https://doi.org/10.1007/s12665-023-11389-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12665-023-11389-x