
Abstract
A procedure for the separation of principal stresses in automated photoelasticity is presented. It is based on the integration of indefinite equations of equilibrium along stress trajectories, also known as Lamè–Maxwell equations. A new algorithm for precise and reliable stress trajectory calculation, which is an essential feature of the procedure, has also been developed. Automated stress separation is carried out along stress trajectories starting from free boundaries. Experimental tests were performed on a disc in diametral compression and on a ring with internally applied pressure. Full-field principal stress values were obtained and results were compared with those from the theory of elasticity and with those obtained from the classical shear difference method. It was shown that the proposed method is more accurate and less affected by the presence of residual stresses or experimental errors at the boundaries than the shear difference method. In addition, the method requires little human interaction and is therefore well-suited for automated photoelasticity.












Similar content being viewed by others

References
Coker EG, Filon LNG (1931) A treatise on Photoelasticity. Cambridge University Press, Cambridge, MA.
Frocht MM (1941) Photoelasticity. Wiley, New York.
Dally JW, Riley WF (1991) Experimental stress analysis, 3rd edn. McGraw-Hill, New York.
Ramesh K (2000) Digital photoelasticity. Springer, Berlin Heidelberg New York.
Ajovalasit A, Barone S, Petrucci G (1998) A review of automated methods for the collection and analysis of photoelastic data. J Strain Anal 33(2):75–91.
Barone S, Burriesci G, Petrucci G (2002) Computer aided photoelasticity by an optimum phase step method. Exp Mech 42(2):1–8.
Patterson EA, Wang ZF (1991) Towards full field automated photoelastic analysis of complex components. Strain 27(2):49–56.
Haake SJ, Patterson EA (1992) The determination of principal stresses from photoelastic data. Strain 28(4):153–158.
Haake SJ, Patterson EA, Wang ZF (1996) 2D and 3D separation of stresses using automated photoelasticity. Exp Mech 36(3):269–276.
Nurse AD (1999) Automated photoelasticity: weighted least-squares determination of field stresses. Opt Lasers Eng 31(5):353–370.
Allison IM (1965) Stress separation by block integration. Br J Appl Phys 16:1573–1581.
Cernosek J (1992) Shear difference method with Chebysev polynomials. Exp Mech 32(4):365–368.
Trebuna F (1990) Some problems of accelerating the measurements and evaluating the stress fields by the photoelastic method. Exp Tech 14(2):36–40.
Dally JW, Erisman ER (1966) An analytic separation method for photoelasticity. Exp Mech 6(10):493–499.
Ajovalasit A (1972) Stress separation in the photoelastic study of centrifugal stresses. Exp Mech 12:525–527.
Mahfuz H, Wong TL, Case RO (1990) Separation of principal stresses by SOR techniques over arbitrary boundaries. Exp Mech 30:319–327.
Kuske A (1979) Separation of principal stresses in photoelasticity by means of a computer. Strain 15(2):43–49.
Segerlind LJ (1971) Stress-difference elasticity and its applications to photomechanics. Exp Mech 11:441–445.
Drucker DC (1943) Photoelastic separation of principal stresses by oblique incidence. J Appl Mech Trans ASME 65(A):156–160.
Drucker DC (1950) The method of oblique incidence in photoelasticity. Proc Soc Exp Stress Anal VIII(1):51–56.
Redner SS (1963) New oblique incidence method for direct photoelastic measurement of principal strains. Exp Mech 3:67–72.
Petrucci G, Restivo G (2004) Automated stress separation along stress trajectories. In: Proceeding of the 2004 SEM X International Congress and Exposition on Experimental and Applied Mechanics, Soc. Exp. Mechanics, Costa Mesa, CA, USA (June 2004).
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
The appendix gives some more details about the procedure for the determination of the endpoints of the stress trajectories.
The input parameters of the procedure for the determination of the endpoints of the each segment are: the coordinates of the starting point, the direction index j and the θ parameter at the pixel where the segment is traced.
One detail regards the determination of the index j at each step. For the first step (n = 1) the value j(1) is also defined by the user in order to trace the desired branch. However, for the following steps the value j(n) is assigned according to its value at the previous pixel j(n-1) and according to the variation of θ from the previous to the actual pixel, given by the expression
Specifically, since θ is defined in the range θ = 0 to π/2, a change in the stress trajectory direction among the four directions defined by j, if going from the pixel n-1 to the following n, can only happen in the presence of an abrupt jump \( {\left| {\Delta \theta {\left( n \right)}} \right|}{ \cong \pi } \mathord{\left/ {\vphantom {{ \cong \pi } 2}} \right. \kern-\nulldelimiterspace} 2 \) in the function that describes θ. Also, note that the direction index must be incremented or decremented by one according to the sign of Δθ. The direction index is therefore given by
It is also important to check that j remains in the range 1–4 by letting
One more detail about how to determine the coordinates of the “active” pixel, which is the pixel considered when retrieving the angle θ used in the procedure. For the first step, the user defines the starting pixel and its center coordinates are assigned as the starting point coordinates. For the following steps the active pixel is determined by the position of the endpoint of the previous step having coordinates x e , y e . However, since the endpoint determined at the previous step always lies on the border of a pixel, an ambiguity between the two adjacent pixels having that border in common can arise. The ambiguity is eliminated by considering the tracing direction. The active pixel coordinates, indicated by X and Y, are obtained as
where dX and dY are given by:
It is convenient to determine the active pixel coordinate right after the endpoint coordinate so that the subroutine would give both the coordinates of the endpoint of the segment and the coordinates of the next pixel as output values.
As a final note, it is worth noting that if the coordinate system is oriented in a different way than in Fig. 1 or if the θ parameter is defined in a different range than θ = 0 to π/2, the vectors (20) must be modified accordingly.
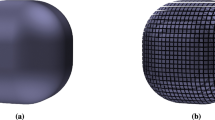
Figure 13 shows two examples of stress trajectories drawn by the proposed algorithm for the case of the disc in diametral compression. Figure 13(a) shows the trajectories calculated using the experimental isoclinic values, and Fig. 13(b) shows the trajectory calculated using theoretical values.

Stress trajectories calculated with the algorithm described in the paper. (a) Experimental, (b) theoretical isoclinic parameters were used
Rights and permissions
About this article
Cite this article
Petrucci, G., Restivo, G. Automated Stress Separation Along Stress Trajectories. Exp Mech 47, 733–743 (2007). https://doi.org/10.1007/s11340-007-9061-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11340-007-9061-9