
Abstract
Drones are one of the latest tools to have been added to farmers’ precision agriculture technology tool kit. Despite the proclaimed benefits, adoption rates of drones are low and literature regarding the adoption of drones in agriculture is scarce. Therefore, this study investigates whether an extended Technology Acceptance Model (TAM) can contribute to the understanding of latent factors influencing farmers’ intention to adopt a drone. The sample of 167 German farmers was collected in 2019 via an online survey. Using partial least squares structural equation modelling and a binary model, the TAM explains 69% of the variance in the intention to use a drone by German farmers. According to the results, raising farmers’ awareness of farm-specific areas of drone application and the confidence level of using a drone can increase farmers’ intention to adopt a drone. The results are of interest for agribusinesses developing drones as well as selling or providing drones. Furthermore, the results are of interest for researchers in precision agriculture technologies.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Precision agriculture (PA) consists of management practices, strategies and corresponding technologies that support management decisions leading to an improvement in resource use efficiency, productivity, profitability and the simultaneous reduction of externalities from agricultural production based on the analysis of temporal, spatial and individual data (Gebbers & Adamchuk, 2010; ISPA, 2019). In this context, farmers use several technologies like global positioning system (GPS) for machine guidance, variable rate technologies (VRT) for the pinpoint application of inputs or sensor networks and remote sensing to collect site-specific information (Khanal et al., 2017). One recent tool added to farmers’ PA technology tool kit is the application of unmanned aerial vehicles (UAV), also known as drones. In contrast to remote sensing via satellites and aircrafts, drones are less inhibited by cloud cover and atmospheric distortion, while still can be affected by severe weather conditions like heavy rain or wind. However, they offer a higher spatial and spectral resolution as well as higher flexibility due to their ability to start almost at any preferred time (Candiago et al., 2015; European Commission, 2018; Moskvitch, 2015).
In Europe, drones are currently mostly used as a non-invasive method to collect site-specific information via cameras and sensors mounted on the drone (Usha & Singh, 2013). Due to legal restrictions they are not widely used for spot spraying or fertilizer applications (Reger et al., 2018; Spalevic et al., 2018) with the exception of the application of Trichogramma spp. for the control of the European corn borer (Ostrinia nubilalis) in some countries. However, using digital cameras, farmers can document damage by wild animals, droughts and hail storms for insurance claims or can be used to track farm animals. Furthermore, using spectral images farmers can detect plant stress due to lack of nutrients, water or drought as well as the presence of pests, weeds and diseases. In addition, information on plant growth and soil health can be collected (Candiago et al., 2015; Cao et al., 2020; European Commission, 2018; Hunt & Daughtry, 2018; Moskvitch, 2015; Sylvester, 2018; Vayssade et al., 2019). Collected spectral information from drones can be further processed into maps which can guide pinpoint fertilizer or pesticide application using complementary precision agriculture technologies (PAT, e.g. variable rate fertilizer applicators and sprayers) (Moskvitch, 2015) or to schedule irrigation procedures (Sylvester, 2018). Hence, the abilities and multi-functionality of drones provide several possible areas of the application of information collected by the drone in agricultural production and offer both economic and environmental benefits to the farmer (Michels et al., 2020). Nevertheless, adoption rates are low and literature focusing on the adoption of drones by farmers is scarce. Zheng et al. (2019) have investigated farmers’ intention to use drones and only Michels et al. (2020) have focused on factors influencing the actual adoption decision. The latter authors mainly focused on farmer and farm characteristics, for instance farmers’ age and farm size, influencing the adoption decision.
Even though the economic benefit associated with a new technology is one of the most important factors for the adoption decision, not all farmers act as strict profit maximizers. Considering that farmers’ utility is not solely dependent on profit maximization, the utility they derive from a specific technology will differ between individuals. Furthermore, especially for new technologies an objective assessment of the associated economic benefits is limited, thus it is the farmer’s perception of these benefits that will influence his or her adoption behavior. If the farmers’ adoption of new technologies was purely based on objectively measurable (economic) benefits that would imply that all farmers are equal and adopt a technology simultaneously (Diederen et al., 2003). Ultimately, it is hence the farmers’ perception of the utility associated with a new technology which regulates the adoption process (Barnes et al., 2019). In addition, farmers are not fully rationale in the decision making (Musshoff & Hirschauer, 2011) and can also be affected by a status quo bias e.g. the preference to preserve the current state (Kahneman et al., 1991). To unravel such cognitive considerations which cannot be observed directly, literature has shown that assessing farmers’ perceptions and beliefs can contribute to the understanding of farmers’ decision making (e.g. Schaak & Musshoff, 2018). Unsurprisingly, literature has also shown that farmers’ perceptions and beliefs towards the technology play a major role in decision making with respect to PAT and decision support tools (DST) (e.g., Adrian et al., 2005; Das et al., 2019; Rose et al., 2016). For instance, Rose et al. (2016) provided evidence that besides other factors, perceived performance, ease of use and relevance to the user are important factors in the decision process for the uptake and use of DST. Adrian et al. (2005) also provided empirical evidence that perceived ease of use and perceived usefulness play a major role in the adoption process with respect to PAT. Hence, it can also be expected that farmers’ perceptions and beliefs towards the benefits and effort of using a drone can play a major role in the decision-making process. This holds especially true since drones are not widespread yet and therefore farmers’ first perceptions with drones may be of great importance in the adoption process. In consequence, delivering programs and marketing activities that addresses farmers’ perceptions and beliefs will be more likely to succeed (Gaffney et al., 2019).
A theoretical framework which explicitly focuses on individuals’ perceptions and beliefs is the Technology Acceptance Model (TAM) (Davis, 1989) which aims to explain an individuals’ intention to adopt a new technology with latent variables (e.g. perceptions and beliefs). In contrast to directly observable variables (e.g. individuals’ age), a latent variable (e.g. individuals’ perception or beliefs) cannot be directly measured but has to be estimated based of other directly observable variables (Kaplan, 2004). The TAM consists of the key latent variables perceived usefulness and perceived ease of use which are expected to have an effect on an individuals’ intention to use a new technology or practice and ultimately on the actual adoption decision (Davis, 1989). Pierpaoli et al. (2013) concluded based on their literature review that both perceived usefulness and perceived ease of use are important latent factors in determining the success of a PAT. With respect to drones, Zheng et al. (2019) already included both latent variables as factors explaining Chinese farmers’ intention to use drones in a binary probit model. However, both latent variables have not been used in a structural equation model as proposed by the framework of the TAM to explain farmers’ intention to use drones and also the actual adoption of drones. More specifically, they have not been used to identify causal relationships in the adoption process as it is possible using structural equation modelling.
Against this background, this study aims to identify which latent factors influence farmers’ intention to adopt a drone and the adoption process in general. Furthermore, the study intends to validate if the TAM framework can also contribute to the understanding farmers’ decision making with respect to the adoption of drones. Hence, the objective of this paper is to study the adoption process of drones by applying an extended TAM framework. Evaluating how farmers’ perceptions influence their adoption behavior and understanding the causal relationship between latent variables therefore allows to identify levers that will facilitate adoption and speed up the adoption process. Considering how PAT and drones in particular can contribute towards a more sustainable agricultural production, which is one of the major challenges agriculture currently faces, enhancing the adoption process is highly relevant. Therefore, this article contributes the following to the literature: This is the first article focusing on a causal analysis to identify latent factors influencing the adoption process of drones in agriculture based on an extended TAM framework. Consequently, this article presents a novel adaptation of the TAM to farmers’ decision making with respect to the adoption of drones.
For this purpose, an online survey using a standardized questionnaire was conducted in 2019 resulting in a sample of 167 German farmers. The methodical approach to estimate the TAM and analyze the causal relationships between the latent variables is partial least squares structural equation modelling (PLS-SEM). Furthermore, a logit model to test the relationship between the intention to use a drone and the actual adoption of drones stated by the farmers in the sample is applied. The results are of interest for agribusinesses developing drones as well as selling or providing drones to improve their marketing activities in a meaningful way for farmers. Furthermore, researchers in the field of PAT could benefit from this study as the proposed extensions of the TAM can also be used in other contexts studying the adoption of PAT. Although the sample consists of German farmers, the results are partially transferable to other countries with similar legal regulations with respect to drones and structure of the agricultural sector.
Literature review, theoretical framework and hypothesis generation
The adoption of new agricultural technologies or practices has been an important factor influencing the (economic) welfare of the farmers as well as the productivity of agricultural production (Chavas & Nauges, 2020). Likewise, agricultural innovations have shaped agricultural production systems (Pathak et al., 2019). The literature describes the common phenomenon that farmers do not adopt a new technology or practice immediately and simultaneously (Diederen et al., 2003), besides the literature suggesting that innovations are adopted if they generate benefits. Likewise, Pierpaoli et al. (2013) noticed that even though much effort is placed into convincing farmers to adopt new technologies, adoption of innovations is a complex activity and the process is influenced by many factors.
Unsurprisingly the adoption of new technologies, especially the adoption of PAT, and factors influencing the adoption process and decision, respectively, have received much attention in the literature (e.g. Antolini et al., 2015; Pathak et al., 2019; Pierpaoli et al., 2013; Tey & Brindal, 2012). Tey and Brindal (2012) provided a literature review about factors influencing the adoption process of PAT. They provided seven categories of factors influencing the adoption of PAT. According to the literature review (1) socio-economic factors (e.g. farmers’ age, education), (2) agro-ecological factors (e.g. soil-quality), (3) institutional factors (e.g. region of farm location), (4) informational factors (e.g. use consultant), (5) farmer perception (e.g. perceived profitability), (6) behavioral factors (e.g. intention to adopt a PAT) as well as (7) technological factors (e.g. use of computers) influence the adoption of PAT (Tey & Brindal, 2012).
Since it is the aim of this research to investigate factors influencing the adoption process of drones by applying an extended TAM, this study contributes to a deeper understanding of factors in the categories five and six. While the literature review has already shown that for instance perceived profitability and the intention to adopt a technology influence the adoption process of several PAT, it is worthwhile to investigate the influence of these factors for drones on its own. Even though drones can be considered as being part of the set of PAT, they differ in some crucial characteristics from other PAT and established farming practices. First of all, drones offer a higher multifunctionality due to several possible areas of application like damage control and documentation. Second, drones can integrate with other PAT as the (spectral) information collected can be used to create maps for precision input application by other PAT (Michels et al., 2020). Lastly, the effective use of drones and the collection data, unlike the use of GPS on tractors or the use of variable-rate fertilizer applicators, is not a continued development of existing technologies, but an entirely new technological approach for which farmers must adapt their way of working and can require learning new technological skills.
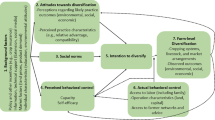
The TAM was developed by Davis (1989) and has been used for agricultural research in several research areas including PAT adoption (e.g., Adrian et al., 2005; Das et al., 2019). According to Verma and Sinha (2018), the TAM is the most widely applied model for the intention to adopt a technology. The proposed TAM for the adoption of drones and its hypotheses (H) will be explained in the following and is also graphically displayed in Fig. 2. To better understand the extensions and adjustments made, the basic TAM is shown in Fig. 1.

Adapted TAM as proposed by David (1989)
Perceived ease of use is defined by Davis (1989) as an individuals’ belief that using a technology is free of effort. Perceived usefulness is an individual’s belief that a technology improves the job performance. According to the TAM framework, both factors determine an individuals’ intention to use a technology and ultimately the actual adoption. Furthermore, an individual who perceives using a technology as easy also perceives the technology as more useful (Davis, 1989). As proposed by the TAM framework, it can also be expected that a farmer who perceives using a drone as easy has a higher intention to use one for agricultural purposes. Furthermore, if the farmer feels that the information provided by the drones is useful for his or her on-farm operational activities, he or she has a higher intention to use a drone. Moreover, if a farmer feels that using a drone is easy, he or she also perceives this instrument as more useful. The following hypotheses represent these considerations:
H1:
Perceived ease of use of drones in agriculture (Peou) has a positive effect on perceived usefulness of drones in agriculture
H2:
Perceived ease of use of drones in agriculture (Peou) has a positive effect on the intention to use drones in agriculture
H3:
Perceived usefulness of drones in agriculture (Pu) has a positive effect on the intention to use drones in agriculture
Adrian et al. (2005) included the latent variable attitude of confidence in their extended TAM for the adoption of PAT. They justified the inclusion of this latent variable with the fact that “precision agriculture technologies provide a vast amount of information…” (Adrian et al., 2005, p. 260). To properly handle this information potentially requires farmers to learn new skills. The latent variable therefore measures the “[…] confidence of a producer to learn how to use precision agriculture technologies” (Adrian et al., 2005, p. 260). This also holds true for drones since they provide large amounts of information for farmers. To collect and use this amount of information in an efficient way, the farmer requires new skills, for instance to transform the collected data online into maps to guide pinpoint fertilizer application. Therefore, a positive effect of the attitude of confidence on perceived ease of use and the intention to use a drone is expected which is in line with Adrian et al. (2005). Hence, the following hypotheses are proposed:
H4:
Attitude of confidence in using drones in agriculture (Aoc) has a positive effect on perceived ease of use of a drone
H5:
Attitude of confidence in using drones in agriculture (Aoc) has a positive effect on the intention to use drones in agriculture
Job relevance is defined by Venkatesh and Davis (2000) as an individual’s perception that a new technology is applicable and/or important to his or her job. Hence, it can be expected that if a farmer feels that the several functions of a drone fit his or her tasks on the farm, he or she perceives drones as more useful. Likewise, this farmer has a higher intention to use a drone. Rose et al. (2016) also observed a higher probability of farmers using a decision support tool if they perceive the provided information as relevant. Hence, the following hypotheses are tested:
H6:
Job relevance of drones in agriculture (Jr) has a positive effect on perceived usefulness of a drone
H7:
Job relevance of drones in agriculture (Jr) has a positive effect on the intention to use drones in agriculture
Lastly, according to the TAM framework, intention to use has a positive effect on the actual adoption decision (Davis, 1989). Therefore, the following hypothesis will be tested:
H8:
Intention to use drones in agriculture (Itu) has a positive effect on the actual adoption of a drone
Material and methods
Structure of the questionnaire
The questionnaire was divided into two parts. In the first part, the farmers were asked to evaluate 14 randomized statements for the estimation of the TAM presented in the previous section. The statements serve as the indicators to estimate the latent variables. To evaluate the 14 statements, a five-point Likert scale was used with 1 = do not agree and 5 = fully agree. The statements were derived from Davis (1989) and Venkatesh and Davis (2000) but adapted and contextualized to the topic of drones in agriculture. In the second part, the farmers were asked to provide socio-demographic and farm related information. Lastly, the farmers were asked if they use a drone on the farm (hired or bought), which serves as the dependent variable in the TAM (Fig. 2). Thus, the dependent variable is a binary variable with 1 = usage of a drone and 0 = no usage of a drone. The questions on sociodemographic and farm related information as well as the statements are shown in Tables 1 and 2.

Proposed extended TAM for the adoption of drones
The questionnaire addressed to German farmers was distributed in the spring of 2019 via German online forums and the largest German social media groups dedicated to agriculture. The link for the survey was posted and farmers were invited to participate on a voluntary basis. Likewise, farmers were informed on the first page that they could cancel the survey at any time. Precondition to take part in the survey was to be aware of the potential usage and application of drones in agriculture. By purposive sampling for farmers who are aware of the application of drones in agriculture, it was ensured that farmers are able to understand and evaluate the drone-specific statements. Furthermore, by using an online questionnaire, it was expected to achieve the group of farmers who are potential adopters of drones. Even though more than 95% of German farmers were already using the internet in 2016, younger, better-educated farmers from larger farms in particular were using the internet with a higher frequency (Michels et al., 2019). These types of farmers represent the potential adopters of PAT and drones, respectively (e.g. Paustian & Theuvsen, 2017; Tey & Brindal, 2012). Likewise, the European Commission (2018) emphasizes that drones are more suitable for larger farms.
Partial least squares structural equation modelling and logit model
The left part of the TAM up to the intention to use a drone is estimated using PLS-SEM. To analyze the relationship between the intention to use a drone and the actual adoption decision a binary logit model is applied to account for the binary response structure of the adoption variable (1 = usage of a drone; 0 = no usage of a drone) (Fig. 2). In the following the procedure of PLS-SEM is explained as a first step. Afterwards, the binary logit model is presented.
Structural equation modelling (SEM) is a combination of factor analysis and multiple regression analysis. SEM allows to simultaneously estimate cause-effect relationships between multiple dependent and independent latent variables. As stated in the introduction, latent variables cannot be directly measured. Hence, indicators in the form of observable variables are used to estimate the latent variables. The indicators are derived from the respondents’ answers to the statements in the survey (Haenlein & Kaplan, 2004; Sarsted et al., 2014). In SEM, independent latent variables are called exogenous while dependent variables are classified as endogenous. The endogenous latent variable(s) are explained by exogenous variables (Hair et al., 2014). For SEM two approaches exist: covariance-based SEM (CB-SEM) and variance-based SEM. The goal of CB-SEM is to minimize the discrepancy between estimated and sample covariance matrices. In contrast, PLS-SEM is a nonparametric variance-based SEM aiming to maximize the explained variance (R2) of the endogenous latent variable (Hair et al., 2011, 2014). The nonparametric PLS-SEM was used for the estimation of the proposed TAM model for the following reasons: This approach to SEM is less restrictive concerning the structure of the data than covariance-based approaches which require normally distributed data. Moreover, it has been proven to perform well if the sample size is small. In addition, PLS-SEM allows the use of latent variables with only one or two indicators. Furthermore, the use of latent variable scores in the subsequent analysis of the adoption decision (1 = usage of a drone; 0 = no usage of a drone) within a logit model is also possible as intended for this study. Lastly, PLS-SEM is more suitable for prediction rather than for theory testing (Hair et al., 2014, 2017, 2019; Sarstedt et al., 2017).
Two steps are required to evaluate a PLS-SEM. In the first step, the relationship between the indicators and the latent variable (outer model; measurement model) is evaluated. In the second step, the causal relationship between the latent variables is estimated (inner model; structural model). The outer model for a simple PLS path model with two latent variables has a causal relationship from the latent variable to its indicators. Therefore, each indicator can be generated as a linear function of its latent variable and the residuals:
where \({\xi }_{i}\) is the vector of the exogenous latent variables and \({\xi }_{j}\) is the vector of the endogenous latent variables. \({X}_{i}\) and \({X}_{j}\) denote the associated vectors of indicator (\({x}_{1},\dots ,{x}_{i};{x}_{1},\dots ,{x}_{j})\) of the exogenous latent variable \({\xi }_{i}\) and endogenous latent variable \({\xi }_{j}\), respectively. Moreover, \({\Lambda }_{i}\) and \({\Lambda }_{j}\) reflect the matrices of the indicator loading (\({\lambda }_{1},\dots , {\lambda }_{k})\) with \(K\) as the number of indicators. \(\varepsilon\) and \(\delta\) are the vectors of measurement errors for the indicators (Chin, 1998).
For the evaluation of the outer model, indicator reliability (1), internal consistency (2), convergent validity (3) and discriminant validity (4) are tested. Standardized loadings of an indicator should exceed 0.7 to establish indicator reliability. Internal consistency is established if composite reliability (\(CR\)) also surpasses a value of 0.7. \(CR\) for a latent variable \({\xi }_{j}\) is estimated as follows:
where \({\lambda }_{jk}\) is the indicator loading and \(\theta _{{jk}}\) is the error variance of the \({k}^{th}\) \(\left(k=1,\dots , {K}_{j}\right)\) indicator for the latent variable \({\xi }_{j}\). Average variance extracted (\(AVE\)) provides an estimation for convergent validity and should exceed 0.5. The \(AVE\) for a latent variable \({\xi }_{j}\) can be estimated as follows:
Lastly, discriminant validity is established by estimating the Heterotrait-Monotrait (\(HTMT\)) correlations between the latent variables. Discriminant validity can also be established using the Fornell-Larcker criterion or by estimating cross-loadings. However, according to Henseler et al. (2015), the HTMT is the best performing and most reliable criterion of all three. The \(HTMT\) ratios should be below 0.9 (Hair et al., 2017; Henseler et al., 2015) and can be estimated for two latent variables \({\xi }_{i}\) and \({\xi }_{j}\) with \({K}_{i}\) and \({K}_{j}\) indicators as follows:
where \({r}_{ij}\) is the coefficient for the correlation between two latent variables \({\xi }_{i}\) and \({\xi }_{j}\).
Before proceeding to the second step of the estimation of a path model, possible issues with multicollinearity should be checked. To assess the level of collinearity between the latent variables in the model, variance inflation factors (VIF) can be estimated. After checking for multicollinearity, the relationships between exogenous and endogenous latent (standardized path coefficients β) variables are estimated in an iterative sequence of ordinary least squares regressions, which is the second step in the PLS-SEM process. The iterative nature of the least squares regression to estimate the model parameters to maximize the endogenous latent variables explained variance is also name-giving for the procedure. In contrast to the ordinary least squares (OLS) regression, the path coefficients for each path are estimated separately. Hence, the parameters of the full model are estimated in parts and not in one model as in the OLS method (Hair et al., 2017; Sarstedt et al., 2017). The inner model therefore connects the endogenous (\({\xi }_{j}\)) and exogenous (\({\xi }_{i}\)) latent variables and can be written as:
\(B\) and \(\Gamma\) are path coefficient matrices, where \({\rm B}\) is the coefficient matrix of the causal effects between endogenous latent variables and \(\Gamma\) represents the coefficient matrix of the causal effects of the exogenous latent variable \({\xi }_{i}\) on the endogenous latent variable \({\xi }_{j}\). In PLS-SEM a latent endogenous variable can also serve as an exogenous variable for another endogenous variable in the structural model which is why an endogenous variable \({\xi }_{j}\) also explains another endogenous variable \({\xi }_{j}\) in Eq. 6. See for instance the latent variable perceived usefulness of drones in agriculture which is explained by the variable job relevance of drones in agriculture and at the same time also serves as an exogenous variable for the intention to use drones in agriculture (Fig. 2). Lastly, \(\zeta\) is the vector of residuals indicating that the independent variables do not fully explain the variance in the latent endogenous latent variables (Chin, 1998). Figure 3 shows these relationships graphically.

Exemplary extract from the applied model to show the relationship between the outer and inner model as well as between the indicators (jr1, jr2; itu1, itu2; see for the indicators Table 3) and the corresponding latent variables (Job relevance of drones in agriculture; Intention to use drones in agriculture). Job relevance of drones in agriculture represents an exogenous latent variable, while intention to use drones in agriculture represents an endogenous latent variable
To estimate t-statistics to check for statistical significance of the standardized path coefficients (β), a bootstrapping procedure with 5,000 subsamples is applied. Furthermore, values for R2 and the out-of-sample predictive relevance (Q2) are estimated. Q2 values are estimated using blindfolding with an omission distance of 7 which means that every 7-th data point is of a latent variables’ indicator is deleted. Then the path model is estimated with the remaining data and the results are used to predict the deleted data points. Furthermore, effect sizes (f2-values) are estimated (Hair et al., 2017). Estimates for the PLS-SEM were performed using SmartPLS 3.2.7 (Ringle et al., 2015).
Since the target endogenous variable in the TAM (Fig. 2) is a binary variable (1 = usage of a drone; 0 = no usage of a drone) applying ordinary least squares regression as used in the procedure of PLS-SEM would result in biased standard errors (Hair et al., 2012). To avoid this, the latent variable score of Itu (\({\widehat{\xi }}_{Itu})\) is implemented as an independent variable in a logistic regression with the dummy variable for the adoption as the dependent variable. Formally, the decision to use a drone can then be specified as follows:
The necessary specification test (Hosmer–Lemeshow chi2-test) for a binary logit model is also conducted and the result for this test is presented in the next section. Coefficients are given as Odds ratios (OR). OR > 1 indicate a positive effect on the dependent variable while OR < 1 indicate a negative effect on the dependent variable. Data analysis for the logit model was carried out using STATA version 14.2
Results and discussion
Descriptive statistics
After the removal of incomplete surveys, 167 usable records remain thus satisfying Bartlett et al.’s (2001) least sample size estimation (n = 167) with a population size of 266,660 farms in Germany in the year of the survey (Statista, 2019) and an applied margin of error of 10% and a confidence interval of 99%. The descriptive statistics of the sample (n = 167) are given in Table 1. For illustrative purposes, the mean values for the average German farmer in the population are provided in the last column of Table 1. 22% of the farmers in the sample use a drone on their farms which exceeds the German average of 9%, regardless of owning a drone or hiring one (German Farmers’ Federation, 2018). The average farmer from the sample is 40 years old and therefore younger than the average German farmer with 53 years of age. 44% of the surveyed farmers’ farms are located in the East of Germany which exceeds the German average of 7% to a large extent. Furthermore, the mean farm size in the sample of 718 hectares of arable land also greatly exceeds the German average of 60 hectares of arable land (German Farmers' Federation, 2019). This could be explained by the fact that the sample has a high share of farmers located in the eastern Federal States of Germany where farms are on average larger compared to the rest of Germany (Reichardt & Jürgens, 2009). The farmers in the sample are well-educated, as 39% of them hold a university degree compared to 12% of farmers for the German average. With respect to the share of female farmers who participated in the survey, the sample (87% male farmers) is close to the German average of 90% male. Similarly, the share of farmers who participate in livestock farming (66%) is close to the German average (67%) (German Farmers' Federation, 2019).
Thus, the sample is not representative for German agriculture and can therefore be described as a non-random sample. As expected, the sample consists of young, well-educated farmers managing larger farms than the German average. Furthermore, a large share of farmers is located in the eastern Federal states of Germany. Therefore, the bias in the sample by conducting an online-survey was expected but also welcomed as briefly shown in the section on material and methods: The farmers in the sample can be seen as the core group of potential adopters of PAT (e.g. Paustian & Theuvsen, 2017; Tey & Brindal, 2012). Furthermore, the large average farm size and the high share of farmers located in the eastern Federal states of Germany are associated with a higher likelihood of PAT adoption (Reichardt & Jürgens, 2009) to which drones can be associated and also used as a complement. Lastly, the European Commission (2018) emphasizes that drones are less suitable for small- and medium farms due to economies of scale. Hence, the sample corresponds to the core group of farmers and farms who are already adopters of drones or most likely potential future adopters of drones. Therefore, to increase user acceptance and facilitate widespread adoption, it is worthwhile to focus on their perceptions and attitudes first. Still, the reader is cautioned that the results should be interpreted representing this type of farmers (young, well-educated farmers from larger farms).
Estimation results of the technology acceptance model
Tables 2 and 3 present the estimation results for the outer model. Table 2 shows the results for the HTMT criterion to establish discriminant validity. Discriminant validity ensures that one latent variable is separable enough from another latent variable. The results support that discriminant validity of the model is given since no HTMT ratio exceeds the threshold level of 0.9 (Hair et al., 2017; Henseler et al., 2015).
Table 3 shows the mean and standard deviation for each indicator as well as the loading of each indicator. Furthermore, values for the CR and AVE are provided in the last columns. Indicator reliability is measured by the loadings of each indicator. More than 50% of the variance of one indicator is explained by the latent variable if loadings exceed the threshold of 0.7, which holds true for all indicators in the model. The lowest loading is displayed by the indicator aoc1 with a value of 0.712. Internal consistency refers to how well a latent variable is measured by the indicators. CR values above 0.7 establish internal consistency for the model. The latent variable Aoc displays the lowest CR value with 0.811 which exceeds the threshold and therefore establishes internal consistency for the model. Convergent validity is measured by the AVE value. AVE is the average amount of variance in its indicators that is explained by the corresponding latent variable relative to the total variance of its indicators. AVE values should exceed 0.5 which means that the latent variable captures more than 50% of the indicators’ variance. The lowest AVE takes a value of 0.686 for the latent variable Aoc and therefore establishes convergent validity for the outer model. Considering the results in Tables 2 and 3, sufficient validity of the outer model is given.
To check for issues with multicollinearity, VIFs for all latent variables in the model are estimated (Table 4). VIFs < 5 indicate the absence of multicollinearity issues (Hair et al., 2017), which holds true for the model. Table 5 presents estimation results for the structural equation model. Table 6 shows the results for the logit model. All results are also graphically displayed in Fig. 4. Explained variance (R2) of the latent variables Itu, Peou and Pu amount to 0.689, 0.342 and 0.514, respectively. Reported values for R2 which amount to 0.670, 0.330, and 0.190 are described for PLS-SEM as substantial, modest and weak, respectively (Chin, 2010). The R2 values of the model can therefore be described as substantial and modest. Values for Q2, estimated with an omission distance of 7, amount to 0.612, 0.249 and 0.355 for the latent variables Itu, Peou and Pu, respectively. Q2 values should exceed 0 (Hair et al., 2017) which holds true for the mentioned latent variables indicating a sufficient predictive relevance of the model. Another conclusion can be drawn by comparing R2 and Q2, as the closer the two values for each latent variable are to each other, the smaller the prediction error and the higher the prediction accuracy of the model. The f2-value measures the change in the R2-value of an endogenous latent variable if the exogenous latent variable is omitted. If f2 values exceed 0.02, 0.15, and 0.35, they indicate small, medium, and large effects of the exogenous on the endogenous latent variable, respectively (Hair et al., 2017). All f2-values, except for the effect of Peou on Pu, exceed the critical threshold of 0.02 indicating that all exogenous latent variables have a reasonable effect on the corresponding endogenous variable.

Results for the extended TAM for the adoption of drones (n = 167). For the hypotheses H1, H2, H3, H4, H5, H6 and H7 the standardized path coefficients (β) are given. For H8 the odds ratio (OR) is given. p < 0.001 (p < 0.01; p < 0.05) is indicated by *** (**; *)
The high values for R2 in the PLS-SEM indicate that the proposed TAM is able to capture some important information about latent features in the adoption process of drones in agriculture. Furthermore, the results contribute further empirical evidence towards the robustness of the TAM and its generality across several research disciplines. Farmers’ intention to use drones is affected by the perceived ease of use, perceived usefulness, attitude of confidence and job relevance of drones as proposed by the TAM. In the following, the results for each hypothesis in the PLS-SEM model are examined in detail.
H1 deals with the effect of perceived ease of use on perceived usefulness. The path coefficient Peou → Pu (β = 0.027; p = 0.694) is not statistically significant. Hence, H1 cannot be supported by the model. One the one hand, this result can be explained by the multi-functionality of drones, as the different features of a drone require different skill levels and effort input by the farmer. For instance, documentation of hail damage might be an easier task than collecting spectral data which can be processed into maps to guide and pinpoint fertilizer application. Hence, the effect of perceived ease of use on perceived usefulness might depend on the area of application and therefore no statistical effect was observable in this case. One the other hand, farmers might also work together with extension services and providers of drones which help them to analyze the collected data. Thus, they might not be able to assess the effort to use the drone or analyze the collected data and therefore no statistical effect was observable in this case. The results also suggest that it might be of interest to differentiate in future studies between farmers’ owing a drone and farmer hiring a drone or a service provider.
As shown with the statistically significant path coefficient Peou → Itu (β = 0.217; p < 0.01), if a drone is perceived as easy to use, the farmer has a higher intention to use it. Hence, H2 can be supported by the model. The results indicate that a time-consuming way to use or start a drone/extract the collected for the targeted operational procedure data may inhibit farmers’ intention to use the drone for data collection or other purposes. A farmer might then prefer to scout the field by foot since it may take too much time for him or her to start or use the drone. H3 considers the effect of perceived usefulness on the intention to use a drone. The path coefficient Pu → Itu (β = 0.243; p < 0.01) is statistically significant. Hence, H3 can be supported by the model. If a drone provides useful information, for instance documentation of hail damage for insurance claims and the farmer understands the benefit of this information, the farmer has a higher intention to use a drone.
H4 and H5 deal with the effect of the attitude of confidence on perceived ease of use and the intention to use a drone, respectively. Both hypotheses can be supported by the model since the path coefficients Aoc → Peou (β = 0.584; p < 0.001) and Aoc → Itu (β = 0.297; p < 0.001) are statistically significant. Hence, if a farmer has a high confidence level that he or she is able to work with a drone, the data provided by drones or digital instruments to further process the data collected by a drone, he or she perceives the application of drones as easier. Moreover, he or she has also a higher intention to use a drone. H6 and H7 deal with the effect of farmers’ perceptions of the job relevance of drones on the perceived usefulness and intention to use a drone. The two statistically significant path coefficients Jr → Pu (β = 0.707; p < 0.001) and Jr → Itu (β = 0.308; p < 0.001) give support to both hypotheses. As described in the introduction, drones offer a high multifunctionality as they can be used on their own or in connection with other PAT. According to the results, a farmer perceives a drone as more useful if he or she recognizes that several functions of the drone also have relevance for several on-farm tasks. Likewise, this farmer has a higher intention to use a drone since he or she can be supported in several operational procedures by a drone.
Since standardized path coefficients were estimated, a comparison of the coefficients’ magnitudes indicates to which degree each exogenous latent variable influences the endogenous latent variable. Consequently, the results for the paths towards farmers’ intention to use a drone can be compared. First of all, comparing the magnitude of the key latent variables’ path coefficients, Peou → Itu (β = 0.217) and Pu → Itu (β = 0.243), the results imply that a higher user-friendliness does not have as strong an influence as the perceived benefit a drone provides the farmer which is in line with Davis (1989) that no perceived ease of use can outweigh the perceived usefulness. This implies that the benefit of using a drone should be clearly portrayed by sellers and providers of drones to increase farmers’ general interest in using a drone. Still, handling a drone and processing of information should be as easy as possible, despite the model having the lowest path coefficient for the effect of perceived ease of use on farmers’ intention to use a drone. However, when looking at the other path coefficients Aoc → Itu (β = 0.297) and Jr → Itu (β = 0.308), the results show an even stronger effect of these latent variables on the intention to use a drone. This implies that reinforcing farmers’ attitude of confidence in using drones and perceived job relevance of drones will increase the likelihood of activating farmers’ intention to use a drone for agricultural purposes. For a practical implication, the results therefore suggest that farmers need to be informed in a meaningful way about drones to increase the perceived job relevance of drones in agriculture and their attitude of confidence in using for agricultural purposes. More specifically, the results emphasize the importance for marketing activities to focus explicitly on the multi-functionality of drones for several on-farm activities. For this purpose, sellers and providers should be able to present corresponding fields of drone application relevant to the farm and the farmer. While it is a common practice to present a technology in the field to a farmer, sellers should collect information on the farm before to evaluate possible areas of drone application. Hence, practical demonstrations of drones with farmers in the field and also guided processing of the collected information as well as guided application of the information with complementary PAT should be personalized and focus on the most relevant task on the farm. Although this may require further collection of information by the providers or sellers, this could increase farmers’ perceived job relevance, attitude of confidence and ultimately their intention to use a drone. In line with that, personalized guided applications could also increase farmers’ attitude of confidence in working with a drone.
In addition, the relationship between the intention to use drones in agriculture and the actual adoption of drones observed in this sample (H8) is also estimated by applying a logit model to the adoption variable which is shown in Table 6. The goodness-of-fit characteristics are displayed below Table 6. The logit model has a log likelihood value of − 56.52. A statistically significant likelihood ratio test (LR chi2(1) = 61.04***) indicates that at least one coefficient in the model is statistically significantly different from zero. A non-statistically significant Hosmer–Lemeshow test (chi2(7) = 6.37, p = 0.496) indicates no misspecification of the model (Cameron & Trivedi, 2009). Nagelkerke Pseudo R2 value amounts to 0.473 and McFadden Pseudo R2 amounts to 0.350. The logit model correctly classified 85.03% of the observations. The logit model providence evidence for a statistically significant relationship between the intention to use drones and the actual adoption of drones since the OR exceeds a value of 1 (OR 9.553; p < 0.001). The result is straightforward as expected by the TAM, but it formally completes the analysis of the TAM. Otherwise an intention-behavior gap would be observed in this case, for instance due to participants not stating their true preferences in the statements. Furthermore, if there would be indeed an intention-behavior gap observed on the basis of the cross-sectional data in this study, this would be an indication that on the one hand the TAM framework cannot be applied to this topic and also the use of panel data is not promising. To conclude, the adoption of drones can therefore be predicted by farmers’ intention to use drones and the TAM framework.
Limitations of the study
As suggested by both anonymous reviewers, it is worthwhile to mention some limitations and criticism about the TAM besides its successful application. The triviality of the TAM, its limited explanatory and predictive power as well as the lack of practical value of the results have been criticized (Lim, 2018). However, it should be noted that the TAM is still the most widely applied model to predict an individuals’ intention to use a technology (Verma & Sinha, 2018) for a reason. As stated by Haji et al. (2020, p. 1181), the TAM provides “clear and understandable insights about the process, stages, and mechanisms of forming acceptance intention”. More specific, Lim (2018) emphasized that the basic TAM offers the opportunity to be extended by further contextualized motivational influences beside its core latent factors perceived usefulness and perceived ease of use and that it can therefore maintain its relevance. In this vein, the proposed extended TAM of this study was extended with the latent factors Jr and Aoc, which serve as upstream factors for Pu and Peou as well as direct influences for Itu. The latent variable Jr was included to account for the multifunctionality of the drones. Furthermore, the latent variable Aoc was added due to the disruptive changes drones can bring to farmers’ way of farming and also due to the required technological skills to work in an effective way with the information collected by the drones. The results of the study also provide evidence that both latent variables are major influences of farmers’ intention to use drones and therefore confirm the suggestions of Lim (2018).
To further validate the robustness of the results, this study should be repeated with a larger, more representative sample. Furthermore, this study was conducted in Germany where drones are not yet fully legally permitted for precise input application but mostly for information gathering for which this study was framed. Thus, drones hold a higher potential for further fields of application in agriculture, which is currently not fully exploited in the EU and other regions due to legal regulations. However, the major hurdle for a sustainable and long-term use of drones for the agricultural production lies in the willingness of farmers to use the drone and the information provided, which was the focus of this study. The results and implications of this study can be therefore used to address this hurdle. If the acceptance for this type of drone application among farmers is achieved, the next step to use drones and the information collected for the precise application of inputs represents a lower hurdle. However, it should nevertheless be validated in further studies whether the relationships between the latent variables in the TAM framework will be exactly the same for other areas of application.
Conclusions
This is the first study investigating the adoption of drones in the TAM framework by analyzing a sample of 167 German farmers collected in 2019 via an online survey. The TAM was estimated using PLS-SEM and a binary logistic regression. 69% of the variation in the intention to use a drone decision was explained by the model. Seven of eight hypotheses of the extended TAM could be supported by the model. Thus, this study provided empirical evidence that the TAM framework can also be applied to the adoption process of drones in agriculture and is also able to capture a large amount of information about the latent features in the process. In summary, the results suggest that—besides the communication of economic benefits—explaining and demonstrating drones and their benefits in an individual meaningful way to the farmers is necessary to change farmers’ perceptions as well as beliefs about drones and to ultimately increase their intention to use drones. In this, marketing activities and guided applications individualized to farmers’ needs and relevant areas of drone application on the specific farm will be more likely to succeed.
Based on the limitations of the study, some outlook on potential further research can be given: It could be useful to investigate farmers’ perceptions with respect to drones in several other potential areas of drone application like precise input application to validate the results. This could be fruitful to address obstacles at an early stage. In addition, this study should be repeated in other countries. In this, by using a panel data and a larger more representative sample, further evidence for the predictive strength of the TAM by assessing the link between farmers’ intention to use a drone and the actual adoption of a drone at a later point of time could be provided. Lastly, as suggested by one anonymous reviewer, as the adoption rates of drones are still low, it could be interesting to investigate from a technology resistance perspective.
References
Adrian, A. M., Norwood, S. H., & Mask, P. L. (2005). Producers’ perceptions and attitudes toward precision agriculture technologies. Computers and Electronics in Agriculture, 48(3), 256–271. https://doi.org/10.1016/j.compag.2005.04.004
Antolini, L. S., Scare, R. F., & Dias, A. (2015). Adoption of precision agriculture technologies by farmers: A systematic literature review and proposition of an integrated conceptual framework. Paper presented at the IFAMA World Conference June 2015.
Barnes, A. P., Soto, I., Eory, V., Beck, B., Balafoutis, A., Sánchez, B., et al. (2019). Exploring the adoption of precision agricultural technologies: A cross regional study of EU farmers. Land Use Policy, 80, 163–174. https://doi.org/10.1016/j.landusepol.2018.10.004
Bartlett, J. E., Kotrlik, J. W., & Higgins, C. C. (2001). Organizational research: Determining appropriate sample size in survey research. Information Technology, Learning, and Performance Journal, 19, 43–50.
Cameron, A. C., & Trivedi, P. K. (2009). Microeconometrics using stata. Stata Press.
Candiago, S., Remondino, F., de Giglio, M., Dubbini, M., & Gattelli, M. (2015). Evaluating multispectral images and vegetation indices for precision farming applications from UAV images. Remote Sensing, 7(4), 4026–4047. https://doi.org/10.3390/rs70404026
Cao, Y., Long, G. L., Luo, Y. K., Pan, Q., & Zhang, S. Y. (2020). Monitoring of sugar beet growth indicators using wide-dynamic-range vegetation index (WDRVI) derived from UAV multispectral images. Computers and Electronics in Agriculture, 171, 105331. https://doi.org/10.1016/j.compag.2020.105331
Chavas, J. P., & Nauges, C. (2020). Uncertainty, learning, and technology adoption in agriculture. Applied Economic Perspectives and Policy, 42(1), 42–53. https://doi.org/10.1002/aepp.13003
Chin, W. W. (1998). The partial least squares approach to structural equation modeling. In G. A. Marcoulides (Ed.), Modern methods for business research. (pp. 295–358). Lawrence Erlbaum Associates.
Chin, W. W. (2010). How to write up and report PLS analyses. In V. E. Vinzi, W. W. Chin, J. Henseler, & H. Wang (Eds.), Handbook of partial least squares. (pp. 655–690). Springer Handbooks of Computational Statistics.
Das, V. J., Sharma, S., & Kaushik, A. (2019). Views of Irish farmers on smart farming technologies: An observational study. AgriEngineering, 1(2), 164–187. https://doi.org/10.3390/agriengineering1020013
Davis, F. D. (1989). Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Quarterly, 13(3), 319–340. https://doi.org/10.2307/249008
Diederen, P., Van Meijl, H., Wolters, A., & Bijak, K. (2003). Innovation adoption in agriculture: Innovators, early adopters and laggards. Cahiers d’Economie et de Sociologie Rurales, INRA Editions, 67, 29–50.
European Commission. (2018). Drones in agriculture. Brussels, Belgium. Retrieved May 20, 2020, from https://ec.europa.eu/growth/tools-databases/dem/monitor/sites/default/files/Drones_vf.pdf
Gaffney, A., Slakie, E., Anderson, C. L., & Gugerty, M. K. (2019). Why attitudes matter: Measuring farmer attitudes in agricultural development. Evans school policy analysis and research (EPAR Brief No. 205), 1–3.
Gebbers, R., & Adamchuk, V. I. (2010). Precision agriculture and food security. Science, 327, 828–831. https://doi.org/10.1126/science.1183899
German Farmers' Federation. (2018). Fast jeder zehnte Bauer setzt auf Drohnen. Deutscher Bauernverband. Retrieved July 20, 2019, from https://www.bauernverband.de/fast-jeder-zehnte-bauer-setzt-auf-drohnen
German Farmers' Federation. (2019). Situationsbericht 2018/19. Deutscher Bauernverband. Retrieved July 20, 2019, from https://www.bauernverband.de/situationsbericht-2018/19
Haenlein, M., & Kaplan, A. M. (2004). A beginner’s guide to partial least squares analysis. Understanding Statistics, 3(4), 283–297.
Hair, J. F., Hult, G., Tomas, M., Ringle, C. M., & Sarstedt, M. (2017). A primer on partial least squares structural equation modeling (PLS-SEM). Sage Publications.
Hair, J. F., Ringle, C. M., & Sarstedt, M. (2011). PLS-SEM. Indeed a silver bullet. Journal of Marketing Theory and Practice, 19(2), 139–152. https://doi.org/10.2753/MTP1069-6679190202
Hair, J. F., Risher, J. J., Sarstedt, M., & Ringle, C. M. (2019). When to use and how to report the results of PLS-SEM. European Business Review, 31(1), 2–24. https://doi.org/10.1108/EBR-11-2018-0203
Hair, J. F., Sarstedt, M., Hopkins, L., & Kuppelwieser, V. G. (2014). Partial least squares structural equation modeling (PLS-SEM): An emerging tool in business research. European Business Review, 26(2), 106–121. https://doi.org/10.1108/EBR-10-2013-0128
Hair, J. F., Sarstedt, M., Ringle, C. M., & Mena, J. A. (2012). An assessment of the use of partial least squares structural equation modeling in marketing research. Journal of the Academy of Marketing Science, 40(3), 414–433. https://doi.org/10.1007/s11747-011-0261-6
Haji, L., Valizadeh, N., Rezaei-Moghaddam, K., & Hayati, D. (2020). Analyzing Iranian Farmers’ behavioral intention towards acceptance of drip irrigation using extended technology acceptance model. Journal of Agricultural Science & Technology, 22(5), 1177–1190.
Henseler, J., Ringle, C. M., & Sarstedt, M. (2015). A new criterion for assessing discriminant validity in variance-based structural equation modeling. Journal of the Academy of Marketing Science, 43(1), 115–135. https://doi.org/10.1007/s11747-014-0403-8
Hunt, E. R. J., & Daughtry, C. S. T. (2018). What good are unmanned aircraft systems for agricultural remote sensing and precision agriculture? International Journal of Remote Sensing, 39(15–16), 5345–5376. https://doi.org/10.1080/01431161.2017.1410300
ISPA. (2019). The International Society of Precision Agriculture. Retrieved March 06, 2020, from https://www.ispag.org/
Kahneman, D., Knetsch, J. L., & Thaler, R. H. (1991). Anomalies: The endowment effect, loss aversion, and status quo bias. Journal of Economic Perspectives, 5(1), 193–206. https://doi.org/10.1257/jep.5.1.193
Kaplan, D. (2004). The SAGE handbook of quantitative methodology for the social sciences. Sage Publications.
Khanal, S., Fulton, J., & Shearer, S. (2017). An overview of current and potential applications of thermal remote sensing in precision agriculture. Computers and Electronics in Agriculture, 139, 22–32. https://doi.org/10.1016/j.compag.2017.05.001
Lim, W. M. (2018). Dialectic antidotes to critics of the technology acceptance model: Conceptual, methodological, and replication treatments for behavioural modelling in technology-mediated environments. Australasian Journal of Information Systems, 22, 1–11. https://doi.org/10.3127/ajis.v22i0.1651
Michels, M., Fecke, W., Feil, J.-H., Mußhoff, O., Pigisch, J., & Krone, S. (2019). An empirical study of internet use intensity in German agriculture. German Journal of Agricultural Economics, 68(1), 1–14.
Michels, M., von Hobe, C.-F., & Musshoff, O. (2020). A trans-theoretical model for the adoption of drones by large-scale German farmers. Journal of Rural Studies, 75(April 2020), 80–88. https://doi.org/10.1016/j.jrurstud.2020.01.005
Moskvitch, K. (2015). Take off: Are drones the future of farming? Engineering & Technology, 10(7–8), 62–66. https://doi.org/10.1049/et.2015.0721
Musshoff, O., & Hirschauer, N. (2011). A behavioral economic analysis of bounded rationality in farm financing decisions: First empirical evidence. Agricultural Finance Review, 71(1), 62–83. https://doi.org/10.1108/00021461111128165
Pathak, H. S., Brown, P., & Best, T. (2019). A systematic literature review of the factors affecting the precision agriculture adoption process. Precision Agriculture, 20(6), 1292–1316. https://doi.org/10.1007/s11119-019-09653-x
Paustian, M., & Theuvsen, L. (2017). Adoption of precision agriculture technologies by German crop farmers. Precision agriculture, 18(5), 701–716. https://doi.org/10.1007/s11119-016-9482-5
Pierpaoli, E., Carli, G., Pignatti, E., & Canavari, M. (2013). Drivers of precision agriculture technologies adoption: A literature review. Procedia Technology, 8, 61–69. https://doi.org/10.1016/j.protcy.2013.11.010
Reger, M., Bauerdick, J., & Bernhardt, H. (2018). Drones in agriculture: Current and future legal status in Germany, the EU, the USA and Japan. Landtechnik – Agricultural Engineering, 73(3), 62–80. https://doi.org/10.15150/lt.2018.3183
Reichardt, M., & Jürgens, C. (2009). Adoption and future perspective of precision farming in Germany. Results of several surveys among different agricultural target groups. Precision Agriculture, 10(1), 73–94. https://doi.org/10.1007/s11119-008-9101-1
Ringle, C. M., Wende, S., & Becker, J. M. (2015). SmartPLS3: Boenningsted, SmartPLS GmbH. Retrieved March 06, 2020, from https://www.smartpls.com/
Rose, D. C., Sutherland, W. J., Parker, C., Lobley, M., Winter, M., Morris, C., et al. (2016). Decision support tools for agriculture: Towards effective design and delivery. Agricultural Systems, 149, 165–174. https://doi.org/10.1016/j.agsy.2016.09.009
Sarstedt, M., Ringle, C. M., & Hair, J. F. (2017). Partial least squares structural equation modeling. In C. Homburg, M. Klarmann, & A. Vomberg (Eds.), Handbook of market research. (Vol. 13, pp. 1–40). Springer International Publishing.
Sarstedt, M., Ringle, C. M., Smith, D., Reams, R., & Hair, J. F. (2014). Partial least squares structural equation modeling (PLS-SEM): A useful tool for family business researchers. Journal of Family Business Strategy, 5(1), 105–115. https://doi.org/10.1016/j.jfbs.2014.01.002
Schaak, H., & Musshoff, O. (2018). Understanding the adoption of grazing practices in German dairy farming. Agricultural Systems, 165, 230–239. https://doi.org/10.1016/j.agsy.2018.06.015
Spalevic, Z., Ilic, M., & Savija, V. (2018). The use of drones in agriculture—ICT policy, legal and economical aspects. Ekonomika, Journal for Economic Theory and Practice and Social Issues, 64, 93–107. https://doi.org/10.22004/ag.econ.290358
Statista. (2019). Anzahl der landwirtschaftlichen Betriebe und Bauernhöfe in Deutschland bis 2019. Retrieved January 12, 2021, from https://de.statista.com/statistik/daten/studie/36094/umfrage/landwirtschaft---anzahl-der-betriebe-in-deutschland/
Sylvester, G. (2018). E-Agriculture in action: Drones for agriculture. Published by Food and Agriculture Organization of the United Nations and International Telecommunication Union, Bangkok.
Tey, Y. S., & Brindal, M. (2012). Factors influencing the adoption of precision agricultural technologies. A review for policy implications. Precision Agriculture, 13(6), 713–730. https://doi.org/10.1007/s11119-012-9273-6
Usha, K., & Singh, B. (2013). Potential applications of remote sensing in horticulture—A review. Scientia Horticulturae, 153, 71–83. https://doi.org/10.1016/j.scienta.2013.01.008
Vayssade, J. A., Arquet, R., & Bonneau, M. (2019). Automatic activity tracking of goats using drone camera. Computers and Electronics in Agriculture, 162, 767–772. https://doi.org/10.1016/j.compag.2019.05.021
Venkatesh, V., & Davis, F. D. (2000). A theoretical extension of the technology acceptance model: Four longitudinal field studies. Management Science, 46(2), 186–204. https://doi.org/10.1287/mnsc.46.2.186.11926
Verma, P., & Sinha, S. (2018). Integrating perceived economic wellbeing to technology acceptance model. The case of mobile based agricultural extension service. Technological Forecasting and Social Change, 126, 207–216. https://doi.org/10.1016/j.techfore.2017.08.013
Zheng, S., Wang, Z., & Wachenheim, C. J. (2019). Technology adoption among farmers in Jilin Province, China: The case of aerial pesticide application. China Agricultural Economic Review, 11(1), 206–216. https://doi.org/10.1108/CAER-11-2017-0216
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Michels, M., von Hobe, CF., Weller von Ahlefeld, P.J. et al. The adoption of drones in German agriculture: a structural equation model. Precision Agric 22, 1728–1748 (2021). https://doi.org/10.1007/s11119-021-09809-8
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11119-021-09809-8