
Abstract
This research manuscript focuses on the extraction of dark-bright solitons and periodic wave distributions of two models, namely, the Zakharov–Kuznetsov–Benjamin–Bona–Mahony equation and complex Kundu–Eckhaus equation with conformable derivative. To reach these important properties, the generalized exponential rational function method is considered. To observe wave distributions in periodic and singular sense, dynamical behaviour modulus of solutions are also archived. Strain conditions for validity of results obtained in this paper are also reported.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Soliton theory is one of the most studied areas in applied sciences, in particular, nonlinear dynamical media. In this sense, Divo-Matos et. al. have firstly investigated the new model for gas adsorption isotherm at high pressures (Divo-Matos et al. 2021). This observation comes from the hydrogen which has been considered as an ideal energy source in the future. They have observed the new isotherm model for supercritical gas adsorption by using the Redlich-Kwong’s equation of state at high pressures. Another a new model to estimate permeability has been formed to explain the carbonate and shale samples (Liu et al. 2020). They have calculated the curvatures from the mercury saturation data by using the Fermic-Dirac function. Gunasekeran and his team introduced the digital health during COVID-19 (Gunasekeran et al. 2021). As it is well known by almost everybody, COVID-19 has affected many peoples from all over the world. In these works, they presented the mathematical perspective to the Covid-19 disease by giving deeper properties such as dynamical structures (Gao et al. 2020), modeling the dynamics of novel coronavirus (2019-nCov) (Khan and Atangana 2020), stochastic COVID-19 Lvy jump model with isolation strategy (Danane et al. 2021), unreported cases of 2019-nCOV epidemic outbreaks (Gao et al. 2020), threshold condition and non pharmaceutical interventions control strategies (Zamir et al. 2021), the spread of COVID-19 with new fractal-fractional operators (Atangana 2020), the total digitalization in education during the Covid pandemi (Yuce 2022). Moreover, many real world problems have been also studied by using mathematical methods and tools such as sine-Gordon expansion method (Eskitascioglu et al. 2019), tanh and extended tanh methods (Bibi and Mohyud-Din 2014; Zayed and Tala-Tebue 2018; Fan 2000). Some important properties of reduced higher-order and perturbed nonlinear Schrödinger equation (Kudryashov 2021, 2020) and so on were presented (Wazwaz 2018; Kaplan et al. 2017; Cattani 2018; Zhang et al. 2015; Bridges and Ratliff 2017a, b). Therefore, such nonlinear evaluation equations (NLEs) have always been one of the most inspiring tools for researchers to study real phenomena and models arising in mathematics, physics, engineering and various fields of science (Chen and Ren 2022; Nabti and Ghanbari 2021; Wang et al. 2020; Ghanbari and Kumar 2021; Hu et al. 2022; Akbulut and Kaplan 2018; Durur and Yokus 2021; Sulaiman et al. 2021; Gao et al. 2020; Ghanbari and Djilali 2020; Rajesh Kanna et al. 2020; Ghanbari 2020; Kaplan and Akbulut 2021; Ghanbari and Atangana 2020; McCue et al. 2021; Djilali and Ghanbari 2021; Gao et al. 2020; Ghanbari 2020a, b; Srivastava et al. 2019; Erturk and Kumar 2020; Ghanbari 2021; Saouli 2020; Ghanbari 2021; Munusamy et al. 2020; Ghanbari et al. 2020; Kaplan 2017; Ghanbari et al. 2019; Kudryashov 2020; Djilali and Ghanbari 2021), (Ali Akbar et al. 2021; Eslami et al. 2021; Rezazadeh et al. 2019; Akinyemi et al. 2021; Hosseini et al. 2020; Nisar et al. 2022; Pinar et al. 2020; Khodadad et al. 2021; Ozkan et al. 2021; Halidou et al. 2022; Can et al. 2020).
The remaining parts of research manuscript are organized as follows. In Sect. 2, overview of the conformable derivative and its general properties are presented. Section 3 provides the general properties of the projected scheme, namely, generalized exponential rational function method GERFM. Main results showing that the system can exhibit some interesting properties of the governing models such as Zakharov–Kuznetsov–Benjamin–Bona–Mahony (ZKBBM) equation and complex Kundu–Eckhaus equation with conformable derivative are given in Sect. 4. The meaning of the parameters of the new findings is given there in terms of different simulations. We discuss and conclude our results in the last section of the paper.
Firstly, ZKBMM equation (lzaidy 2013; Khodadad et al. 2017; Aksoy et al. 2016) given as
where a, b are real-valued constants is studied.
Secondly, nonlinear complex Kundu–Eckhaus equation defined by Khater et al. (2018), Khodadad et al. (2017), Mirzazadeh et al. (2018):
where \(\rho , \delta\) are real-valued constants is investigated by using projected method to extract some important properties.
2 Overview of the conformable derivative
Recently, an operator called conformable was formulated by Khalil in Khalil et al. (2014). The conformable calculus satisfies all the properties of the standard calculus. This operator may be considered to be a natural extension of the classical properties (Usta 2018; Abdeljawad 2015; Benkhettou et al. 2016; Ünal and Gökdogan 2017).
Definition 2.1
Let \(f:[0,\infty )\rightarrow {\mathbb {R}}\), the conformable derivative of a function f(t) of order \(\alpha\), is defined as (Khalil et al. 2014)
This new definition satisfies the properties in the following theorem:
Theorem 1
(Khalil et al. 2014) Let \(\alpha \in (0,1]\), f, g be \(\alpha\)-differentiable at a point t, then
-
\(D_t^{\alpha }(af+bg)=a D_t^{\alpha }(f)+b D_t^{\alpha }(g)\), for \(a,b \in {\mathbb {R}}\).
-
\(D_t^{\alpha }(t^\mu )=\mu t^{\mu -\alpha }\), for \(\mu \in {\mathbb {R}}\).
-
\(D_t^{\alpha }(fg)=fD_t^{\alpha }(g)+gD_t^{\alpha }(f)\).
-
\(D_t^{\alpha }(\frac{g}{g})=\frac{gD_t^{\alpha }(f)-fD_t^{\alpha }(g)}{g^2}\).
If, in addition, f is differentiable, then \(D_t^{\alpha }(f)(t)=t^{1-\alpha } \frac{df}{dt}\). (Abdeljawad 2015) established the chain rule for conformable derivatives as following theorem:
Theorem 2
Let \(f:(0,1]\rightarrow {\mathbb {R}}\), be a function such that f is differentiable and also \(\alpha\)-conformable differentiable. Let g be a differentiable function defined in the range of f. Then
where prime denotes the classical derivatives with respect to t.
3 Overview of the generalized exponential rational function method
In this section, we state the main steps of GERFM as follows (Biazar and Ghanbari 2012; Ghanbari and Kuo 2021; Kumar et al. 2021; Ghanbari and Akgül 2020; Ismael et al. 2020; Ghanbari et al. 2020)
-
1.
Let us take into account the following nonlinear partial differential equation
$$\begin{aligned} {\mathscr {L}}(\Upsilon ,\Upsilon _x,\Upsilon _{t},\Upsilon _{xx},\cdots )=0. \end{aligned}$$(4)Via the transformations \(\Upsilon ={\Upsilon }(\xi )\) and \(\xi =\sigma x-\varphi t\), in nonlinear partial differential equation (4), we attain
$$\begin{aligned} \mathscr {L}({\Upsilon },{\Upsilon }',{\Upsilon }'',\cdots )=0, \end{aligned}$$(5)which is indeed an ordinary differential equation; where the values of \(\sigma\) and \(\varphi\) will be found later.
-
2.
Consider equation (5) has the solution of the form
$$\begin{aligned} {\Upsilon }(\xi )=A_0+\sum _{k=1}^{M}A_k \Psi (\xi ) ^{k}+ \sum _{k=1}^{M}B_k \Psi (\xi ) ^{-k}, \end{aligned}$$(6)where
$$\begin{aligned} \Psi (\xi )=\frac{r _1 e^{s_1 \xi }+r _2 e^{s_2 \xi }}{r _3 e^{s_3 \xi }+r _4 e^{s_4 \xi }}. \end{aligned}$$(7)The values of constants \(r _i, s_i(1 \le i \le 4)\), \(A_0, A_k\) and \(B_k (1 \le k \le M)\) are determined, in such a way that solution (6) always persuade equation (5). By considering the homogenous balance principle the value of M is determined.
-
3.
Putting equation (6) into Eq. (5) we give the following algebraic equation \(\Xi (\Lambda _1, \Lambda _2, \Lambda _3, \Lambda _4)=0\), in terms of \(\Lambda _i=e^{s_i \xi }\) for \(i=1,\ldots , 4\). After setting each of the coefficients of variables in \(\Xi\) to zero, a system of nonlinear equations in terms of these parameters is constructed.
-
4.
By solving the above system of equations using any symbolic computation software, the values of \(r _i, s_i(1 \le i \le 4)\), \(A_0, A_k\), and \(B_k(1 \le k \le M)\) are determined, replacing these values in Eq. (6) provides us the soliton solutions of Equation (4).
4 Main results
In this section, we apply GERFM into the governing models to find some important properties.
4.1 The ZKBMM equation with conformable derivative
In this subsection, we investigate exact wave solutions in studying the conformable version of the ZKBMM Eq. (1), giving by
By considering the wave transformation
where c, k are non zero constants. Utilizing the wave transformation (33), we get
When we integrate once and setting the integration constant to zero in (10), we obtain
Applying the balance principle on the terms \({\mathscr {U}}^2\) and \({\mathscr {U}}''\) in Eq. (11), we have \(2M=M+2\). Consequently, we find \(M=2\). Using Eq. (7) together with \(M=2\), we have
The following results are provided by processing the general steps required in the method.
Set 1:
One obtains \(r=[2,0, 1, 1]\) and \(s=[-1,0,1,-1]\), so Eq. (7) turns to
Case 1.1: We also obtain
Putting values in Equations (12) and (13), yields the following solution
Consequently, we get the solution of Equation (8) as
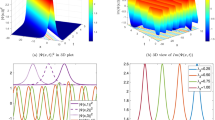
Figure 1 shows the dynamic properties of \(u_{1} \left( x,t \right)\) for \(a = 0.5, b = 0.1, k = 0.3\), and for two different values of \(\alpha\)’s.

Dynamic behaviours modulus of solution \(u_{1} \left( x,t \right)\) for \(a = 0.5, b = 0.1, k = 0.3\)
Case 1.2: We also obtain
Putting values in Equations (12) and (13), yields the following solution
Consequently, we get the solution of Equation (8) as
Figure 2 shows the dynamic properties of \(u_{2} \left( x,t \right)\) for \(a =1.6, b = 0.5, k = 0.5\), and for two different values of \(\alpha\)’s.

Dynamic behaviours modulus of solution \(u_{2} \left( x,t \right)\) for \(a = 1.6, b = 0.5, k = 0.5\)
Set 2:
One obtains \(r=[1-i,-1-i, -1, 1]\) and \(s=[i,-i,i,-i]\), so Eq. (7) turns to
Case 2.1: We also obtain
Putting values in Equations (12) and (16), yields the following solution
Consequently, we get the solution of Equation (8) as
Figure 3 shows the dynamic properties of \(u_{3} \left( x,t \right)\) for \(a = 0.3, b = 0.15, k = 0.7\), and for two different values of \(\alpha\)’s.

Dynamic behaviours modulus of solution \(u_{3} \left( x,t \right)\) for \(a = 0.3, b = 0.15, k = 0.7\)
Case 2.2: We also obtain
Putting values in Equations (12) and (16), yields the following solution
Consequently, we get the solution of Equation (8) as
Figure 4 shows the dynamic properties of \(u_{4} \left( x,t \right)\) for \(a = 0.15, b = 0.35, k = 0.5\), and for two different values of \(\alpha\)’s.

Dynamic behaviours modulus of solution \(u_{4} \left( x,t \right)\) for \(a = 0.15, b = 0.35, k = 0.5\)
Set 3:
One obtains \(r=[2,0, 1,-1]\) and \(s=[1,0,1,-1]\), so Eq. (7) turns to
Case 3.1: We also obtain
Putting values in Equations (12) and (19), yields the following solution
Consequently, we get the solution of Equation (8) as
Case 3.2: We also obtain
Putting values in Equations (12) and (19), yields the following solution
Consequently, we get the solution of Equation (8) as
Figure 5 shows the dynamic properties of \(u_{6} \left( x,t \right)\) for \(a = 0.8, b = 0.9, k = 0.9\), and for two different values of \(\alpha\)’s.

Dynamic behaviours modulus of solution \(u_{6} \left( x,t \right)\) for \(a = 0.15, b = 0.35, k = 0.5\)
Set 4:
One obtains \(r=[-1,0, 1,1]\) and \(s=[0,0,1,0]\), so Eq. (7) turns to
We also obtain
Putting values in Equations (12) and (22), yields the following solution
Consequently, we get the solution of Equation (8) as
Figure 6 shows the dynamic properties of \(u_{7} \left( x,t \right)\) for \(a = 0.65, b = 0.35, k = 0.85\), and for two different values of \(\alpha\)’s.

Dynamic behaviours modulus of solution \(u_{7} \left( x,t \right)\) for \(a = 0.65, b = 0.35, k = 0.\)
Set 5:
One obtains \(r=[3,2, 1,1]\) and \(s=[1,0,1,0]\), so Eq. (7) turns to
We also obtain
Putting values in Equations (12) and (24), yields the following solution
Consequently, we get the solution of Equation (8) as
Figure 7 shows the dynamic properties of \(u_{8} \left( x,t \right)\) for \(a = 0.5, b = 0.35, A_2 =3\), and for two different values of \(\alpha\)’s.

Dynamic behaviours modulus of solution \(u_{8} \left( x,t \right)\) for \(a = 0.5, b = 0.35, A_2 =3\)
Set 6:
One obtains \(r=[-3,-2, 1,1]\) and \(s=[1,0,1,0]\), so Eq. (7) turns to
We also obtain
Putting values in Equations (12) and (26), yields the following solution
Consequently, we get the solution of Equation (8) as
Set 7:
One obtains \(r=[i,-i, 1,1]\) and \(s=[i,-i,i,-i]\), so Eq. (7) turns to
We also obtain
Putting values in equations (12) and (28), yields the following solution
Consequently, we get the solution of Equation (8) as
Figure 8 shows the dynamic properties of \(u_{10} \left( x,t \right)\) for \(a = 0.5, b = 1.5, k=0.8\), and for two different values of \(\alpha\).

Dynamic behaviours modulus of solution \(u_{10} \left( x,t \right)\) for \(a = 0.5, b = 1.5, k=0.8\)
Set 8:
One obtains \(r=[1,1,- 1,1]\) and \(s=[1,-1,1,-1]\), so Eq. (7) turns to
We also obtain
Putting values in Equations (12) and (30), yields the following solution
Consequently, we get the solution of Equation (8) as
4.2 The conformable Kundu–Eckhaus equation
In this part, we aim to construct exact wave solutions in studying the conformable version of the Kundu–Eckhaus equation (32), giving by
In order to find solutions of Equation (32), following new variables are introduced
where \(\omega , k\) and \(\epsilon\) are constants to be determined.
Taking Eq. (33) into account in Eq. (32) yields
If we balance the highest derivative term of \(\Theta ''\) and nonlinear term of \(\Theta ^5\) in Eq. (34) as \(M+2=5M\), we obtain \(M=\frac{1}{2}\).
So, we need to use a new transformation \(\Theta \left( \xi \right) ={\mathscr {U}}^{1\over 2}\left( \xi \right)\) in Eq. (34) to get
Now if we apply the balance principle on the terms \({\mathscr {U}}^4\) and \({\mathscr {U}}{\mathscr {U}}''\) in Eq. (35), we have \(4M=M+M+2\), so \(M=1\). Using Eq. (7) together with \(M=1\), we have
The following results are provided by processing the general steps required in the method.
Set 1:
One obtains \(r=[-1,0, 1, 1]\) and \(s=[0,0,1,1]\), so Eq. (7) turns to
Case 1.1: In this case we also obtain
Putting values in Equations (36) and (37), yields the following solution
and
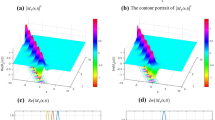
Figure 9 shows the dynamic behavior of solution \(q_{1} \left( x,t \right)\) for \(\sigma =0.75, \rho = 0.95, \omega = 0.6\), and \(\alpha =0.9\).

Dynamic behaviours modulus of solution \(q_{1} \left( x,t \right)\), real part (left) and imaginary part (right) for \(\sigma =0.75, \rho = 0.95, \omega = 0.6\), and \(\alpha =0.9\)
Case 1.2: In this case we also obtain
Putting values in Equations (36) and (37), yields the following solution
and
Figure 10 shows the dynamic behavior of solution \(q_{2} \left( x,t \right)\) for \(\sigma =0.75, \rho = 0.8, \omega = 0.69\), and \(\alpha =0.9\).

Dynamic behaviours modulus of solution \(q_{2} \left( x,t \right)\), real part (left) and imaginary part (right) for \(\sigma =0.75, \rho = 0.8, \omega = 0.69\), and \(\alpha =0.9\)
Set 2:
One obtains \(r=[2,0, 1, -1]\) and \(s=[1,0,1,-1]\), so Eq. (7) turns to
Case 2.1: In this case we also obtain
Putting values in equations(36) and (40), yields the following solution
and
Case 2.2: In this case we also obtain
Putting values in equations (36) and (40), yields the following solution
and
Set 3:
One obtains \(r=[1,2,1,1]\) and \(s=[0,1,0,1]\), so Eq. (7) turns to
We also obtain
Putting values in equations(36) and (43), yields the following solution
and
Figure 11 shows the dynamic behavior of solution \(q_{5} \left( x,t \right)\) for \(\sigma =0.8, \rho = 0.2, \omega = 0.8\), and \(\alpha =0.7\).

Dynamic behaviours modulus of solution \(q_{5} \left( x,t \right)\), real part (left) and imaginary part (right) for \(\sigma =0.8, \rho = 0.2, \omega = 0.8\), and \(\alpha =0.7\)
Set 4:
One obtains \(r=[-3,-2,1,1]\) and \(s=[0,1,0,1]\), so Eq. (7) turns to
We also obtain
Putting values in equations (36) and (45), yields the following solution
and
Set 5:
One obtains \(r=[ 2,0,1,1]\) and \(s=[-1,0,-1,1]\), so Eq. (7) turns to
We also obtain
Putting values in equation (36) and (47), yields the following solution
and
Figure 12 shows the dynamic behavior of solution \(q_{7} \left( x,t \right)\) for \(\sigma =0.45, \rho = 0.85, \omega = 0.35\), and \(\alpha =0.95\).

Dynamic behaviours modulus of solution \(q_{7} \left( x,t \right)\), real part (left) and imaginary part (right) for \(\sigma =0.45, \rho = 0.85, \omega = 0.35\), and \(\alpha =0.95\)
Set 6:
One obtains \(r=[ -3,-1,1,1]\) and \(s=[1,-1,1,-1]\), so Eq. (7) turns to
We also obtain
Putting values in equations (36) and (49), yields the following solution
and
Figure 13 shows the dynamic behavior of solution \(q_{8} \left( x,t \right)\) for \(\sigma =0.5, \rho = 0.5, \omega = 0.5\), and \(\alpha =1\).

Dynamic behaviours modulus of solution \(q_{8} \left( x,t \right)\), real part (left) and imaginary part (right) for \(\sigma =0.5, \rho = 0.5, \omega = 0.5\), and \(\alpha =1\)
5 Conclusions
In this research, the projected method has been effectively applied to the nonlinear complex Kundu–Eckhaus and Zakharov–Kuznetsov–Benjamin–Bona–Mahony equations in conformable domain used to explain the most fascinating problems of modern optics. Some important optical soliton solutions such as single (dark, bright and singular), complex solitons, as well as a hyperbolic, travelling wave and trigonometric function solutions have been successfully extracted. The graphical simulations of the reported solutions have been also presented in Figs. (1, 2, 3, 4, 5, 6, 7, 8, 9, 10 , 11, 12, 13). While some of these figures symbolize singular wave properties, others gives travelling wave distributions. The results are entirely new, interesting and play an important roles in the field of the nonlinear Schrödinger equation because the studied model, namely nonlinear complex Kundu–Eckhaus equation is one of the part of NLSE. When we consider the obtained results, it is clear that the method has less limitations than other methods in determining the exact solutions of the equations. Despite the simplicity and ease of use of this method, it has a very powerful performance and is able to introduce a wide range of various types of solutions to such mathematical models. The idea used in this paper is readily applicable to solving other partial differential equations in mathematical physics. Finally, we observed that the propagation dynamics of these solutions obtained in this paper via GERFM may be used to explain the general properties of the nonlinear optical wave distributions (Weisstein 2002).
Availability of data and material
The authors confirm that the data supporting the findings of this study are available within the article and its supplementary materials.
References
Abdeljawad, T.: On conformable fractional calculus. J. Comput. Appl. Math. 279, 57–66 (2015)
Abdeljawad, T.: On conformable fractional calculus. J. Comput. Appl. Math. 279, 57–66 (2015)
Akbulut, A., Kaplan, M.: Auxiliary equation method for time-fractional differential equations with conformable derivative. Comput. Math. Appl. 75(3), 876–882 (2018)
Akinyemi, L., Nisar, K.S., Saleel, C.A., Rezazadeh, H., Veeresha, P., Khater, M.M.A., Inc, M.: Novel approach to the analysis of fifth-order weakly nonlocal fractional Schrödinger equation with Caputo derivative. Results Phys. 31, 104958 (2021)
Aksoy, E., Kaplan, M., Bekir, A.: Exponential rational function method for space-time fractional differential equations. Waves Random Complex Media 26(2), 142–51 (2016)
Ali Akbar, M., Akinyemi, L., Yao, S.W., Jhangeer, A., Rezazadeh, H., Khater, M.M.A., Aahmet, H., Inc, M.: Soliton solutions to the Boussinesq equation through sine-Gordon method and Kudryashov method. Results Phys. 25, 104228 (2021)
Atangana, A.: Modelling the spread of COVID-19 with new fractal-fractional operators: can the lockdown save mankind before vaccination? Chaos Solitons Fractals 136, 109860 (2020)
Benkhettou, N., Hassani, S., Torres, D.F.: A conformable fractional calculus on arbitrary time scales. J. King Saud Univ.-Sci. 28(1), 93–98 (2016)
Biazar, J., Ghanbari, B.: The homotopy perturbation method for solving neutral functional-differential equations with proportional delays. J. King Saud Univ. Sci. 24(1), 33–37 (2012)
Bibi, S., Mohyud-Din, S.T.: New traveling wave solutions of Drinfeld Sokolov Wilson Equation using Tanh and Extended Tanh methods. J. Egypt. Math. Soc. 22(3), 517–523 (2014)
Bridges, T.J., Ratliff, D.J.: On the elliptic-hyperbolic transition in Whitham modulation theory. SIAM J. Appl. Math. 77(6), 1989–2011 (2017)
Bridges, T.J., Ratliff, D.J.: Nonlinear modulation near the Lighthill instability threshold in (2+1)-Whitham theory. Phil. Trans. Roy. Soc. Lond. A 376, 20170194 (2017)
Can, N.H., Nikan, O., Rasoulizadeh, M.N., Jafari, H., Gasimov, Y.S.: Numerical computation of the time non-linear fractional generalized equal width model arising in shallow water channel. Thermal Sci. 24(1), 49–58 (2020)
Cattani, C.: A review on harmonic wavelets and their fractional extension. J. Adv. Eng. Comput. 2(4), 224238 (2018)
Chen, S., Ren, Y.: Small amplitude periodic solution of Hopf Bifurcation Theorem for fractional differential equations of balance point in group competitive martial arts. Appl. Math. Nonlin. Sci. (2022). https://doi.org/10.2478/amns.2021.2.00152
Danane, J., Allali, K., Hammouch, Z., Nisar, K.S.: Mathematical analysis and simulation of a stochastic COVID-19 Levy jump model with isolation strategy. Results Phys. 23, 103994 (2021)
Divo-Matos, Y.E., Cruz-Rodriquez, R.C., Regueraa, L., Reguera, E.: A new model for gas adsorption isotherm at high pressures. Int. J. Hydrog. Energy 46(9), 6613–6622 (2021)
Djilali, S., Ghanbari, B.: The influence of an infectious disease on a prey-predator model equipped with a fractional-order derivative. Adv. Differ. Equ. 2021(1), 1–6 (2021)
Djilali, S., Ghanbari, B.: The influence of an infectious disease on a prey-predator model equipped with a fractional-order derivative. Adv. Differ. Equ. 2021(1), 20 (2021)
Durur, H., Yokus, A.: Exact solutions of (2 + 1)-Ablowitz-Kaup-Newell-Segur equation. Appl. Math. Nonlin. Sci. 6(2), 381–386 (2021)
Erturk, V.S., Kumar, P.: Solution of a COVID-19 model via new generalized Caputo-type fractional derivatives. Chaos Solitons Fractals 1(139), 110280 (2020)
Eskitascioglu, E.I., Aktas, M.B., Baskonus, H.M.: New complex and hyperbolic forms for Ablowitz-Kaup-Newell-Segur wave equation with fourth order. Appl. Math. Nonlinear Sci. 4(1), 105–112 (2019)
Eslami, M., Hosseini, K., Matinfar, M., Mirzazadeh, M., Ilie, M., Gómez-Aguilar, J.F.: A nonlinear Schrödinger equation describing the polarization mode and its chirped optical solitons. Opt. Quant. Electron. 53(314), 1–10 (2021)
Fan, E.: Extended tanh-function method and its applications to nonlinear equations. Phys. Lett. A 277, 212–218 (2000)
Gao, W., Baskonus, H.M., Shi, L.: New investigation of bats-hosts-reservoir-people coronavirus model and application to 2019-nCoV system. Adv. Differ. Equ. 2020(1), 1–1 (2020)
Gao, W., Veeresha, P., Baskonus, H.M., Prakasha, D.G., Kumar, P.: A new study of unreported cases of 2019-nCOV epidemic outbreaks. Chaos Solitons Fractals 1(138), 109929 (2020)
Gao, W., Veeresha, P., Baskonus, H.M., Prakasha, D.G., Kumar, P.: A new study of unreported cases of 2019-nCOV epidemic outbreaks. Chaos Solitons Fractals 138(109929), 1–6 (2020)
Gao, W., Veeresha, P., Prakasha, D.G., Baskonus, H.M.: Novel dynamical structures of 2019-nCoV with nonlocal operator via powerful computational technique. Biology 9(5), 107 (2020)
Ghanbari, B.: On the modeling of the interaction between tumor growth and the immune system using some new fractional and fractional-fractal operators. Adv. Differ. Equ. 2020(1), 1–32 (2020)
Ghanbari, B.: A fractional system of delay differential equation with nonsingular kernels in modeling hand-foot-mouth disease. Adv. Differ. Equ. 2020(1), 1–20 (2020)
Ghanbari, B.: On approximate solutions for a fractional prey-predator model involving the Atangana-Baleanu derivative. Adv. Differ. Equ. 2020(1), 1–24 (2020)
Ghanbari, B.: On the nondifferentiable exact solutions to Schamel’s equation with local fractional derivative on Cantor sets. Numer. Methods Partial Differ. Equ. (2021). https://doi.org/10.1002/num.22740
Ghanbari, B.: On novel nondifferentiable exact solutions to local fractional Gardner’s equation using an effective technique. Math. Methods Appl. Sci. Numer. Methods Partial Differ. Equ. 1, 1 (2021). https://doi.org/10.1002/mma.7060
Ghanbari, B., Akgül, A.: Abundant new analytical and approximate solutions to the generalized Schamel equation. Phys. Scr. 95(7), 075201 (2020)
Ghanbari, B., Atangana, A.: Some new edge detecting techniques based on fractional derivatives with non-local and non-singular kernels. Adv. Differ. Equ. 2020(1), 1–9 (2020)
Ghanbari, B., Djilali, S.: Mathematical and numerical analysis of a three-species predator-prey model with herd behavior and time fractional-order derivative. Math. Methods Appl. Sci. 43(4), 1736–52 (2020)
Ghanbari, B., Günerhan, H., Ílhan, O.A., Baskonus, H.M.: Some new families of exact solutions to a new extension of nonlinear Schrödinger equation. Phys. Scr. 95(7), 075208 (2020)
Ghanbari, B., Kumar, S.: A study on fractional predator-prey-pathogen model with Mittag-Leffler kernel-based operators. Num. Meth. Partial Dif. Eq. (2021). https://doi.org/10.1002/num.22689
Ghanbari, B., Kuo, C.K.: Abundant wave solutions to two novel KP-like equations using an effective integration method. Phys. Scr. 96(4), 045203 (2021)
Ghanbari, B., Nisar, K.S., Aldhaifallah, M.: Abundant solitary wave solutions to an extended nonlinear Schrödinger’s equation with conformable derivative using an efficient integration method. Adv. Differ. Equ. 2020(1), 1–25 (2020)
Ghanbari, B., Yusuf, A., Baleanu, D.: The new exact solitary wave solutions and stability analysis for the (2+ 1) \((2+ 1)\)-dimensional Zakharov-Kuznetsov equation. Adv. Differ. Equ. 2019(1), 1–5 (2019)
González-Gaxiola, O.: The Laplace-Adomian Decomposition Method Applied to the Kundu-Eckhaus Equation, arXiv preprint arXiv:1704.07730 (2017)
Gunasekeran, D.V., Tham, Y.C., Ting, D.S.W., Tan, G.S.W., Wong, T.Y.: Digital health during COVID-19: lessons from operationalising new models of care in ophthalmology. The Lancet Digital Health 3(2), e124–e134 (2021)
Halidou, H., Abbagari, S., Houwe, A., Inc, M., Thomas, B.B.: Rational W-shape solitons on a nonlinear electrical transmission line with Josephson junction. Phys. Lett. A 430, 127951 (2022)
Hosseini, K., Seadawy, A.R., Mirzazadeh, M., Eslami, M., Radmehr, S., Baleanu, D.: Multiwave, multicomplexiton, and positive multicomplexiton solutions to a (3 + 1)-dimensional generalized breaking soliton equation. Alex. Eng. J. 59(5), 3473–3479 (2020)
Hu, S., Meng, Q., Xu, D., Al-Juboori, U.A.: The optimal solution of feature decomposition based on the mathematical model of nonlinear landscape garden features. Appl. Math. Nonlinear. Sci. https://doi.org/10.2478/amns.2021.1.00070 (2022)
Hu, B., Xia, T., Zhang, N.: A Riemann-Hilbert Approach to the Kundu-Eckhaus Equation on the Half-Line (2017) arXiv preprint arXiv:1711.02516
Ismael, H.F., Bulut, H., Baskonus, H.M.: W-shaped surfaces to the nematic liquid crystals with three nonlinearity laws. Soft Comput. 26, 1–2 (2020)
lzaidy, J.F.: Fractional sub-equation method and its applications to the space-time fractional differential equations in mathematical physics. Br. J. Math. Comput. Sci. 3, 153–163 (2013)
Kaplan, M.: Applications of two reliable methods for solving a nonlinear conformable time-fractional equation. Opt. Quant. Electron. (2017). https://doi.org/10.1007/s11082-017-1151-z
Kaplan, M., Akbulut, A.: The analysis of the soliton-type solutions of conformable equations by using generalized Kudryashov method. Opt. Quant. Electron. (2021). https://doi.org/10.21203/rs.3.rs-315162/v1
Kaplan, M., Bekir, A., Ozer, M.N.: A simple technique for constructing exact solutions to nonlinear differential equations with conformable fractional derivative. Opt. Quant. Electron. 49(266), 478 (2017)
Khalil, R., Al Horani, M., Yousef, A., Sababheh, M.: A new definition of fractional derivative. J. Comput. Appl. Math. 264, 65–70 (2014)
Khan, M.A., Atangana, A.: Modeling the dynamics of novel coronavirus (2019-nCov) with fractional derivative. Alex. Eng. J. 59(4), 2379–2389 (2020)
Khater, M.M.A., Seadawy, A.R., Lu, D.: Optical soliton and rogue wave solutions of the ultra-short femto-second pulses in an optical fiber via two different methods and its applications. Optik 158, 434–450 (2018)
Khodadad, F.S., Alizamini, S.M.M., Gunay, B., Akinyemi, L., Rezazadeh, H., Inc, M.: Abundant optical solitons to the Sasa-Satsuma higher-order nonlinear Schrödinger equation. Opt. Quant. Electron. 53, 702 (2021)
Khodadad, F.S., Nazari, F., Eslami, M., Rezazadeh, H.: Soliton solutions of the conformable fractional Zakharov-Kuznetsov equation with dual-power law nonlinearity. Opt. Quant. Electron. 49(11), 1–2 (2017)
Kudryashov, N.A.: Highly dispersive solitary wave solutions of perturbed nonlinear Schrödinger equations. Appl. Math. Comput. 371, 124972 (2020)
Kudryashov, N.A.: Traveling wave solutions of the generalized Gerdjikov-Ivanov equation. Optik. 1(219), 165193 (2020)
Kudryashov, N.A.: Almost general solution of the reduced higher-order nonlinear Schrödinger equation. Optik 230, 166347 (2021)
Kumar, S., Niwas, M., Hamid, I.: Lie symmetry analysis for obtaining exact soliton solutions of generalized Camassa-Holm-Kadomtsev-Petviashvili equation. Int. J. Modern Phys. B 35(02), 2150028 (2021)
Liu, K., Mirzaei-Paiaman, A., Liu, B., Ostadhassan, M.: A new model to estimate permeability using mercury injection capillary pressure data: application to carbonate and shale samples. J. Natural Gas Sci. Eng. 84(103691), 1–20 (2020)
McCue, S.W., El-Hachem, M., Simpson, M.J.: Exact sharp-fronted travelling wave solutions of the Fisher-KPP equation. Appl. Math. Lett. 1(114), 106918 (2021)
Mirzazadeh, M., Yıldırım, Y., Yaşar, E., Triki, H., Zhou, Q., Moshokoa, S.P., Ullah, M.Z., Seadawy, A.R., Biswas, A., Belic, M.: Optical solitons and conservation law of Kundu-Eckhaus equation. Optik. 1(154), 551–7 (2018)
Munusamy, M., Ravichandran, C., Nisar, K.S., Ghanbari, B.: Existence of solutions for some functional integrodifferential equations with nonlocal conditions. Math. Meth. Appl. Sci. 43(17), 10319–31 (2020)
Nabti, A., Ghanbari, B.: Global stability analysis of a fractional SVEIR epidemic model. Math. Methods Appl. Sci. (2021). https://doi.org/10.1002/mma.7285
Nisar, K.S., Akinyemi, L., Inc, M., Senol, M., Mirzazadeh, M., Houwe, A., Abbagari, S., Rezazadeh, H.: New perturbed conformable Boussinesq-like equation: Soliton and other solutions. Results Phys. 33, 105200 (2022)
Ozkan, Y.S., Eslami, M., Rezazadeh, H.: Pure cubic optical solitons with improved tan(/2)-expansion method. Opt. Quant. Electron. 53(566) (2021)
Pinar, Z., Rezazadeh, H., Eslami, M.: Generalized logistic equation method for Kerr law and dual power law Schrödinger equations. Opt. Quant. Electron. (2020). https://doi.org/10.1007/s11082-020-02611-2
Rajesh Kanna, M.R., Kumar, R.P., Nandappa, S., Cangul, I.N.: On solutions of fractional order telegraph partial differential equation by Crank-Nicholson finite difference method. Appl. Math. Nonlin. Sci. 5(2), 85–98 (2020)
Rezazadeh, H., Korkmaz, A., Eslami, M., Mirhosseini-Alizamini, S.M.: A large family of optical solutions to Kundu-Eckhaus model by a new auxiliary equation method. Opt. Quant. Electron. 51(84), 1–10 (2019)
Saouli, M.A.: Existence of solution for mean-field reflected discontinuous backward doubly stochastic differential equation. Appl. Math. Nonlin. Sci. 5(2), 85–98 (2020)
Srivastava, H.M., Gunerhan, H., Ghanbari, B.: Exact traveling wave solutions for resonance nonlinear Schrödinger equation with intermodal dispersions and the Kerr law nonlinearity. Math. Meth. Appl. Sci. 18, 7210–2 (2019)
Sulaiman, T.A., Bulut, H., Baskonus, H.M.: On the exact solutions to some system of complex nonlinear models. Appl. Math. Nonlin. Sci. 6(1), 29–42 (2021)
Ünal, E., Gökdogan, A.: Solution of conformable fractional ordinary differential equations via differential transform method. Optik-Int. J. Light Electron. Opt. 128, 264–273 (2017)
Usta, F.: A conformable calculus of radial basis functions and its applications. Int. J. Optim. Control 8(2), 176–182 (2018)
Wang, W.B., Lou, G.W., Shen, X.M., Song, J.Q.: Exact solutions of various physical features for the fifth order potential Bogoyavlenskii-Schiff equation. Results Phys. 1(18), 103243 (2020)
Wazwaz, A.M.: Multiple complex and multiple real soliton solutions for the integrable sine Gordon equation. Optik 172, 622–627 (2018)
Weisstein, E.W.: Concise Encyclopedia of Mathematics, 2nd edn. CRC Press, New York (2002)
Yuce, E.: The immediate reactions of EFL learners towards total digitalization at higher education during the Covid-19 pandemic. Kuramsal Egitimbilim 15(1), 1–15 (2022)
Zamir, M., Nadeem, F., Abdeljawad, T., Hammouch, Z.: Threshold condition and non pharmaceutical interventions control strategies for elimination of COVID-19. Results in Phys. 20, 103698 (2021)
Zayed, E.M., Tala-Tebue, E.: New Jacobi elliptic function solutions, solitons and other solutions for the (2+1)-dimensional nonlinear electrical transmission line equation. Eur. Phys. J. Plus 133(314), 1–15 (2018)
Zhang, Y., Cattani, C., Yang, X.J.: Local fractional homotopy perturbation method for solving non-homogeneous heat conduction equations in fractal domains. Entropy 17, 67536764 (2015)
Funding
There is no funding for this paper.
Author information
Authors and Affiliations
Contributions
RZ considered the validity formally. FSVC studied on te modification of the paper. WG study conceptualization and writing the manuscript. HMB analysized and supervised the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Baskonus, H.M., Gao, W. Investigation of optical solitons to the nonlinear complex Kundu–Eckhaus and Zakharov–Kuznetsov–Benjamin–Bona–Mahony equations in conformable. Opt Quant Electron 54, 388 (2022). https://doi.org/10.1007/s11082-022-03774-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-022-03774-w