
Abstract
This paper characterizes the robustness of exponential stability of fuzzy inertial neural network which contains time delays or stochastic disturbance through the estimation of upper limits of perturbations. By utilizing Gronwall-Bellman lemma, stochastic analysis, Cauchy inequality, the mean value theorem of integrals, as well as the properties of integrations, the limits of both time delays and stochastic disturbances are derived in this paper which can make the disturbed system keep exponential stability. The constraints between the two types of disturbances are provided in this paper. Examples are offered to validate our results.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Neural networks (NNs) have attracted an increasing amount of attention over the last decade, due to their widespread applications of neural networks in image encryption technology [1], signal processing [2], control theory [3, 4] and other fields [5,6,7]. With the deepening of research on neural networks, many classic neural network models have been proposed, such as Hopfiled neural network (HNN) [8], cellular neural network (CNN) [9, 10], recurrent neural network [11], etc. These models mentioned above are all represented by linear or nonlinear differential equations with first order derivatives. However, due to the biological and physical application of second-order derivative terms, they can not be ignored while analyzing the dynamic behaviors of system. The second derivative term is also called inertia term, which is considered to be an effective method to generate chaos, bifurcation and other complex dynamic behaviors. Moreover, inertial terms can also be used for unordered searches of memory. In addition, the inertia term can also be used to describe the relationship between flux and current in physics [12]. Hence, in [13], Babcock and Westervelt considered the inertia in connections of neurons for the first time, and described the embryonic form of inertial neural networks (INNs) as a class of second-order differential equations. Due to the existence of inertia terms, the analysis of properties, like stability, bifurcation, passivity, dissipativity, and so on, are more complex than other kinds of NNs. Many scholars have utilized the reduced order method (ROM) to reduce the complexity of INNs and obtained some significant results [14,15,16,17,18].
Among the properties of INNs, stability is the prerequisite for the applications. However, in the actual circuit simulation process, due to the limited conversion speed of amplifiers and the random fluctuations during the operation of electronic equipment, time delays and stochastic disturbances are inevitable which may destroy the stability of NNs. Different time delays can also lead to different dynamic behaviors of INN. Different working mechanisms of electronic devices can lead to different time delays, for example, time-varying delays [19], distributed delays [20], constant delays [21] and so on. In addition, stochastic disturbance is a class of complex and irregular perturbation, which is completely different from traditional processes. It can cause uncertain oscillations during system operation to make the system can not reach the designed performance. Some stability criteria of INNs disturbed by those two disturbances are obtained in recent years, for example, in [22], the problems of finite time stabilization and fixed time stabilization of stochastic INNs (SINNs) are explored by designing feedback control laws inputs as well as using the stochastic analysis theory. Huang et al. discussed the problem of global exponential stability by differential inequality analysis, and some novel assertions to ensure the global exponential stability of delayed INNs (DINNs) are obtained in [23]. In [24], Cui et al. obtained stability criteria for DINN with random pulses by using matrix measurement method as well as stochastic theory. Wang and Chen studied the mean-square exponential stability of delayed SINNs (DSINNs) by constructing Lyapunov–Krasovskii functionals in [25].
It is worth noting that the preceding works focuses on the stability of INNs perturbed by time delays or stochastic disturbances in the absence of fuzzy logic. In the process of handling practical problems by using NNs, there inevitably are some inconveniences, for example, the vagueness. Hence, fuzzy logic as a powerful tool to deal with the fuzziness are widely used to deal with the problem in [26,27,28,29]. Different with general NNs, fuzzy neural network (FNN) has not only sum and product operations but also fuzzy MAX and fuzzy MIN operation in their structures, this also greatly improves its ability of image recognition. In addition, neural network models with fuzzy logic operations are recognized as universal approximators. In order to ensure the designed FNNs without inertial terms meet the performance requirements, some conditions are obtained in recent years [30,31,32,33,34]. Besides, in [35], Chen and Kong combined the fuzzy logic and DINNs (FDINNs), and several delay-dependent conditions for exponential stability of FDINNs are obtained.
Noting that the literature mentioned above all explore the problem of stability, and there are few scholars to discuss the robustness of stability (RoS). Robustness refers to the ability of systems to maintain their properties within a certain range of parameters or structures changes. Besides, time delay and stochastic disturbances as two typical structural changes exist in neural networks extensively. And, for an exponential stable system with disturbance, its original decay coefficient and decay rate will be changed when certain intensities of disturbances are changed, it may destroy the stability of original system. So, it is worth exploring how much intensity of disturbances can make perturbed system maintain the original feature of stability of the original system. This is also a motivation for this article. At present, most researches on ROS only focuses on first-order neural networks [30, 31, 36,37,38,39,40] and none of the results have involved FINNs. However, in practical applications, due to the inherent special properties of electronic components, high-order neural network models are usually needed to more accurately describe their dynamic behaviors in reality. Hence, it is very necessary to study the RoS of FINN.
Therefore, based on the above discussions, the works and contributions of this paper are listed below.
-
FDINN and SDFINN models are proposed in this paper, and those models are transformed into two coupled first-order FINNs by using ROM. Compared with [16, 17], the ROM used in this paper includes two positive variable parameters \(\eta _i,\xi _i\), which further expands the ROM used in [16, 17] which is only contain one variable parameter.
-
In addition, in this paper, we have removed the limitation on the derivative of time delay function \(\varsigma (t)\) in [37,38,39,40, 43], which means that \(\varsigma '(t)\le \delta < 1\) not satisfied in this paper.
-
The upper limits of time delay and max intensity of noise are obtained respectively by applying Grownwall-Bellman lemma as well as inequality techniques to ensure the perturbed FINNs keep exponential stability. The constraint relationship between disturbances is given when two types of disturbances are active simultaneously.
Finally, the structure of this paper is given below. In Sect. 2, the model considered is given, and transform the second-order system into first-order system by using ROM, and some assumptions and definitions are given. In Sect. 3, the upper limits of time delay to make FDINNs keep exponential stability is derived by using Grownwall-Bellman lemma and other inequality techniques. Moreover, stochastic FDINN model (SFDINN) is discussed in Sect. 4, and limits of two types of perturbations are obtained, and the relationship between time delay and noise are highlighted. Several numerical instances are given in Sect. 5 to verify the results in this paper.
Notations \(\mathbb {R}=(-\infty ,+\infty )\). \(\mathbb {Z}^+\) represents the set which contains all positive integers. \(\mathbb {R}^n\) and \(\mathbb {R}^{n\times m}\) represent real valued n-dimensional vector and real valued \(n\times m\) matrices, respectively. \(\bigwedge \) and \(\bigvee \) are fuzzy AND and fuzzy OR operations, respectively. \(|\cdot |\) represent the Euclidean norm and \(||x(t)||=\sum _{i=1}^n|x_i(t)|\). \((\hbar ,\mathfrak {F},\{\mathfrak {F}_t\}_{t\ge 0},\mathcal {P})\) is the complete probability space which embraces all \(\mathcal {P}\)-null sets, and filtration \(\mathfrak {F}_{t\ge 0}\) is right continuous and satisfies the usual conditions. B(t) is a Brownian movement which is defined in \((\hbar ,\mathfrak {F},\{\mathfrak {F}_t\}_{t\ge 0},\mathcal {P})\). \(\mathbb {E}\) is the operator of mathematical expectation. \(L^2_{\mathfrak {F}_0}([-P,0];\mathbb {R}^n)\) is a set of all \(C([-P,0];\mathbb {R}^n)\) valued stochastic variables \(\hslash =\{\hslash (t):-P\le t\le 0\}\) which are \(\mathfrak {F}_0\) measurable and \(\sup _{-P\le t\le 0}\mathbb {E}||\hslash (t)||^2\le \infty \). \(\varsigma (t)\) is time varying delay and \(0\le \varsigma (t)\le P\).
2 Primaries
Consider the following FINN model.
where \(i\in \{1,\dots ,n\}\), n is the number of neurons. The second derivative is the inertial term of system (1). \(y_i(t)\in \mathbb {R}\) is the state of ith neuron. \(a_i\) and \(b_i\) are two positive constants. \(g_j\) is the jth activation function. \(c_{ij},~h_{ij}\) are connection weights between ith and jth neuron. \(e_{ij},~k_{ij},~S_{ij},~T_{ij}\) represent fuzzy feedback MIN template, fuzzy feedback MAX template, fuzzy feedforward MAX template and fuzzy feedforward MIN template, respectively. \(I_i\) denotes the external input of ith neuron. In addition, \(\sum _j=\sum _{j=1}^{n}\), \(\bigwedge _j=\bigwedge _{j=1}^n\) and \(\bigvee _j=\bigvee _{j=1}^n\).
Let \(\bar{y}_i=\eta _i\frac{dy_i(t)}{dt}+\xi _{i}y_i(t),\), where \(\eta _i\) and \(\xi _i\) are positive constants and \(\eta _i\ne 0\), then
Hence,
Therefore, assume the \((y^*,\bar{y}^*)\) is the equilibrium point of system (1), let \(\zeta _i(t)=y_i(t)-y_i^*\), \(\varrho _j(\zeta _j(t))=g(y_j(t)-y_j^*)-g_j(y_j^*)\), then system (3) can be rewritten in the following form
Before achieving our main results, the following assumptions, definitions and lemmas are needed.
Assumption 1
There exists a positive constant l such that
holds, where u, \(v\in \mathbb {R}\).
Remark 1
According to the definition of \(\varrho _j(\cdot )\), we can obtain that \(\varrho _j(0)=0\), which means that \(\varrho _j(\cdot )\) satisfies the linear growth condition, i.e., \(|\varrho _j(u)|\le l|u|\). Furthermore, from the definition of \(||\cdot ||\), we can get that \(||\varrho (u)-\varrho (v)||\le l||u-v||\), where \(\varrho (\cdot )=(\varrho _1(\cdot ),\cdots ,\varrho _n(\cdot ))^T\).
Definition 1
[41] FINN (4) is said to be global exponential stable (GES), if there exist constants \(\ell >0\) and \(\wp >0\) such that
holds, where \(\ell \) represents the decay coefficient, \(\wp \) is decay rate.
In this paper, unless specified, assume that model (4) is exponential stable.
Lemma 1
Assume u and v are two states of model (4), then we have
3 The limit of time delay
In this section, we will explore the limit of time delays that make FDINN maintains exponential stability. Firstly, the form of FDINN model is in below.
where \(\varsigma (t)\) is time varying delay function.
Remark 2
Due to the existence of time delay, the definition of exponential stability of (7) is in the following form
Theorem 1
Let Assumption 1 holds, \(\Delta >\ln {\ell }/\wp \), then, FDINN is said to be exponentially stable if \(P\le \min \{\Delta /2,\bar{P}\}\), and \(\bar{P}\) is the unique solution of the following transcendental equation
where \(\Psi _1=\ell /\wp \epsilon _5P\Lambda _2+2P^2\Lambda _2\), and \(\Psi _2=\Lambda _1+\epsilon _5P\Lambda _2\).
Proof
For simplicity, denote \(\varphi _i=\varphi _i(t)\), \(\bar{\varphi }_i=\bar{\varphi }_i(t)\), \( \varphi ^\varsigma _i=\varphi _i(t-\varsigma (t))\), \(\zeta _i=\zeta _i(t)\), \(\bar{\zeta }_i=\bar{\zeta }_i(t)\), \(W_i=\varphi _i-\zeta _i,\bar{W}_i=\bar{\varphi }_i-\bar{\zeta }_i\), \(\varphi =\{\varphi _1,\dots ,\varphi _n\}\) and \(\bar{\varphi }=\{\bar{\varphi }_1,\dots ,\bar{\varphi }_n(t)\}\), hence, we can obtain
Then, let \(\epsilon _1=\max \limits _{i=1,\dots ,n}\{1/|\eta _i|\}\), \(\epsilon _2=\max \limits _{i=1,\dots ,n}\{|\xi _i/\eta _i|\}\), \(\epsilon _3=\max \limits _{i=1,\dots ,n}\{|\alpha _i|\}\), \(\epsilon _4=\max \limits _{i=1,\dots ,n}\{|\beta _i|+l\sum _{j}[|\eta _j|(|c_{ji}|+|h_{ji}|+|e_{ji}|+|k_{ji}|)]\}\), \(\epsilon _5=\max \limits _{i=1,\dots ,n}\{l\sum _{j}|\eta _j|(|h_{ji}|+|e_{ji}|+|k_{ji}|)\}\), we have
and
Thus,
where \(\Lambda _1=\max \{\epsilon _1+\epsilon _3,\epsilon _2+\epsilon _4\}\).
Since
Therefore,
and
where \(\Lambda _2=\max \{\epsilon _1,\epsilon _2\}\).
Similarly,
Then, when \(t>t_0+P\),
By utilizing Grownwall inequality, when \(t_0+P\le t\le t_0+2\Delta \), we have
where \(\Psi _1=\ell /\wp \epsilon _5P\Lambda _2+2P^2\Lambda _2\), and \(\Psi _2=\Lambda _1+\epsilon _5P\Lambda _2\).
Note that \(P\le \Delta /2\), hence, when \(t_0-P+\Delta \le t\le t_0-P+2\Delta \),
Select \(\varTheta (P)=\Psi _1\exp (2\Psi _2\Delta )+\ell \exp (-\wp (\Delta -P))\). From the definition of \(\vartheta \), we could find that \(\varTheta (P)\) is strictly increasing with respect to P. In addition, since \(\Delta >\frac{\ln l}{\wp }\), hence, \(\varTheta (0)<1\). Therefore, there exists a constant \(\bar{P}\) such that \(\varTheta (\bar{P})=1\), i.e. for all \( 0<P\le \bar{P}\), \(\varTheta (P)\le 1\) holds.
Let \(\mho =-\ln \varTheta /\Delta \), hence, \(\mho >0\), when \(P\in [0,\bar{P}]\). Therefore, from (15), we have
Thus, by using mathematical induction and the existence and uniqueness of (4), a constant \(\kappa \in \mathbb {N}^+\), such that
where \(\mathfrak {Z}=\sup _{s\in [t_0-P,t_0-P+\Delta ]}\biggl (||\varphi ||+||\bar{\varphi }||\biggr )\).
And then, for all \(t>t_0-P+\Delta \),
holds.
Clearly, (18) also holds for \(t_0\le t\le t_0-P+\Delta \). Thus, system (4) can maintain global exponential stable. \(\square \)
Remark 3
The time delay is common in the process of system operation, and the system will produce different dynamic behavior with different time delay. In the current studies [12, 15, 21], there is no upper bound on the time delay that the system can withstand to maintain exponential stability.
4 The limit of time delay and the intensity of stochastic disturbance
In this section, we consider the following system with two types of disturbances:
where \(\varsigma (t)\) is the time-varying delay function; B(t) is the Brownian movement defined in complete probability space; \(\varpi _i\) is the intensity of Brownian movement.
Similarly, let \(\bar{\gamma }_i=\eta _i\frac{d\gamma _i(t)}{dt}+\xi _{i}\gamma _i(t),\eta _i\ne 0\), we can obtain that
Then, we give the definition of exponential stability of SFDINN (20) in mean square.
Definition 2
[42] SFDINN (20) is said to be mean square exponentially stable if there are two constants \(\ell>0,~\wp >0\) such that
holds.
In order to maintain exponential stability of SFDINN in mean square, we have the following theorem.
Theorem 2
Let Assumption 1 holds, \(\Delta >\ln {2\ell ^2}/2\wp \), then, SFDINN (20) is said to be exponential stability in mean square if \(|\varpi |<\bar{\varpi }\) and \(P<\min \{\Delta /2,\bar{P}\}\), \(\bar{\varpi }\) and \(\bar{P}\) satisfy the following two transcendental equations
and
where
Proof
For simplify, denote \(\gamma _i=\gamma _i(t)\), \(\bar{\gamma }_i=\bar{\gamma }(t)\), \(\gamma _i^\varsigma =\gamma _i(t-\varsigma (t))\), \(\zeta _i=\zeta _i(t)\), \(\bar{\zeta }_i=\bar{\zeta }_i(t)\), \(\gamma =\{\gamma _1,\dots ,\gamma _n\}\), \(\bar{\gamma }=\{\bar{\gamma }_1,\dots ,\bar{\gamma }_n\}\), \(\zeta =\{\zeta _1,\dots ,\zeta _n\}\), \(\bar{\zeta }=\{\bar{\zeta }_1,\dots ,\bar{\zeta }_n\}\), \(\varGamma _i=\gamma _i-\zeta _i\) and \(\bar{\varGamma }_i=\bar{\gamma }_i-\bar{\zeta }_i\) From SFDINN (20), we can obtain that
Hence,
Therefore, for \(t<t_0+2\Delta \),
where \(\varpi =\max \limits _{i=1,2,\dots ,n}|\varpi _i|\).
Thus,
where \(\Lambda _3=\max \{4\Delta \epsilon _1^2+12\Delta \epsilon _3^2,4\Delta \epsilon _2^2+12\Delta \epsilon _4^2+4\varpi ^2\}\).
Since, when \(t<t_0+2\Delta \),
and
Therefore,
and
Hence,
So, when \(t\le t_0+2\Delta \), from the Gronwall inequality, we can obtain
where \(\mathfrak {A}(\varpi ,P)=24\Delta \Lambda _4(2P^2\ell ^2/\wp +P^2)+2\varpi ^2\ell ^2/\wp \), \(\mathfrak {B}(\varpi ,P)=\Lambda _3+48\Delta \epsilon _5^2P^2\Lambda _4\).
Furthermore, when \(t_0-P+\Delta \le t\le t_0-P+2\Delta \), noting that \(P\le \Delta /2\), then
where \(\mathbb {Q} (\varpi ,P)=\mathfrak {A}(\varpi ,P)\exp (2\mathfrak {B}(\varpi ,P)\Delta )+\ell ^2\exp (-2\wp (\Delta -P))\).
From Assumption 1, we can obtain that \(\mathbb {Q}(0,0)<1\) and \(\mathbb {Q}(\infty ,0)>1\). Since, \(\mathbb {Q}(\varpi ,0)\) is strictly increasing for \(\varpi \), hence, there exists a \(\bar{\varpi }>0\) such that \(\mathbb {Q}(\bar{\varpi },0)=1\). Similarly, \(\mathbb {Q}(\varpi ,P)\) is also increasing for P when \(|\varpi |\le \bar{\varpi }\), thus, exist a \(\bar{P}>0\) such that \(\mathbb {Q}(\varpi /\sqrt{2},\bar{P})=1\) holds. That means SFDINN is exponential stable in mean square when \(|\varpi |\le \bar{\varpi }\) and \(P<\min \{\Delta /2,\bar{P}\}\).
Select \(\varOmega =-\ln {\mathbb {Q}(\varpi ,P)}/\Delta \), then we have
The rest of the proof is similar with the Theorem 1, so it is omitted here. \(\square \)
Remark 4
The result in Theorem 2 in not a simple extension of the result of Theorem 1, there is a mutual constraint relationship between the magnitude of the intensity of two disturbance factors.
Remark 5
Table 1 provides a comparison of the existing literature with this paper. Elements to be compared are time delay (T-D), stochastic disturbances (S-D), RoS, inertial terms (I-T), fuzzy logic (F-L).
Remark 6
The Fig. 1 shows the detailed analysis steps of Theorems 1 and 2. In addition, due to random perturbations in SFDINN, \(It\hat{o}\) formula is essential, which also leads to the fact that Theorem 1 is not a simple generalization of Theorem 2.

The analysis steps of this paper
5 Examples
Example 1 Consider the following inertial neural network.
where \(a_1=a_2= 2\), \(b_1=b_2=1\), \(c=[0.2~-0.2;-0.1~-0.3]\), \(h=[-0.3~0.1;-0.2~0.2]\), \(e=[0.2~-0.1;-0.1~0.1]\), \(k=[0.1~-0.1;-0.1~0.1]\).
Let \(\eta _1=\eta _2=1\), \(\xi _1=\xi _2=1\) and \(\Delta =0.15\), (36) can be rewritten as the following form
In addition, choose decay coefficient \(\ell =1\) and decay rate \(\wp =0.4\). Then \(\epsilon _1=\epsilon _2=1\), \(\epsilon _3=-1\), \(\epsilon _4=1.3\), \(\epsilon _5=1\), \(\Lambda _1=2.3\) and \(\Lambda _2=1\). Hence, from (15), we have
Therefore, \(\bar{P}=0.0107\), i.e., inertial neural network (36) is GES if \(P\le \bar{P}\).
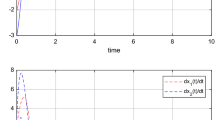
Figure 2 shows the states of FINN (37) in initial values \((-0.7,-0.1)\) and (0.1, 0.4) with \(P=0.001<0.0107\). Hence, FDINN is GES. And, the value of \(||\varphi (t)||+||\bar{\varphi }(t)||\) is shown in Fig. 3.
Example 2 Consider the following SFDINN.
where the parameters are the same as those in Example 1.

The states of (37) with \(P=0.001\) in initial value \((\varphi _1(t_0),\varphi _2(t_0))=(-0.7,-0.1)\) and \((\bar{\varphi }_1(t_0),\bar{\varphi }_2(t_0))=(0.1,0.4)\)

The value of \(||\varphi (t)||+||\bar{\varphi }(t)||\)
Similarly, take same \(\eta _i\) and \(\xi _i\) in Example 1., then SFDINN (39) can be rewritten in the following form,
Then, from (22) and (23), we can obtain the following two transcendental Equations
and
After calculations, we can obtain \(\bar{\varpi }=0.0067\), and \(\bar{P}=0.0021\), i.e. SFDINN (39) is MSES when \(|\varpi |\le \bar{\varpi }/\sqrt{2}=0.0047\) and \(P\le \min \{\Delta /2,\bar{P}\}=0.0021\).
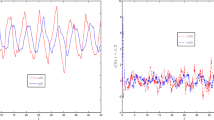
Choose \(P=0.001<0.0021\) and \(\varpi =0.003<0.0047\), then it can maintain exponential stability as shown in Fig. 4. Figure 5 shows the states of SFDINN (39) in the sense of mean square with \(P=0.001<0.0021\) and \(\varpi =0.003<0.0047\).
Figure 6 shows the state of system (39) when \(P=0.001\) and \(\varpi =2\). Since \(\varpi \) is greater than the result derived from Theorem 2, the system cannot continue to maintain exponential stability, which is exactly what Fig. 7 shows. In Figs. 8 and 9, we take \(P=4\) and \(\varpi =4\). At this time, the intensities of both perturbations are greater than the upper bound derived from the Theorem 2, so the system is not exponentially stable. Therefore, it can be seen that only when both perturbations satisfy the conditions, the disturbed system can still maintain global exponential stability.

The state of SFDINN (40) with \(P=0.001\) and \(\varpi =0.003\)

The value of \(\mathbb {E}||\gamma (t)||^2+\mathbb {E}||\bar{\gamma }(t)||^2\) under \(P=0.001\) and \(\varpi =0.003\)

The state of SFDINN (40) with \(P=0.001\) and \(\varpi =2\)

The value of \(\mathbb {E}||\gamma (t)||^2+\mathbb {E}||\bar{\gamma }(t)||^2\) under \(P=0.001\) and \(\varpi =2\)

The state of SFDINN (40) with \(P=4\) and \(\varpi =4\)

The value of \(\mathbb {E}||\gamma (t)||^2+\mathbb {E}||\bar{\gamma }(t)||^2\) under \(P=4\) and \(\varpi =4\)
Remark 7
By Examples 1 and 2, we can see that the system will continue to maintain exponential stability when both perturbations are in the range we have calculated. In addition, Fig. 10 gives a brief calculation process for numerical examples.

A brief calculation process for numerical examples
Remark 8
The ROM used in this paper contains two variable parameters \(\eta _i\) and \(\xi _i\), which is different from the [16, 17]. The choice of variable parameters also affects the norm of the system, for example consider the following system model:
Use the ROM for the above systems, take \(z(t)=\eta \dot{y}(t)+\xi y(t)\), then, the system transforms to a high dimensional system below:
It can be found that when either or both \(\eta \) and \(\xi \) are 1, the transformed system is a special case of system (44). Figure 11 shows the states of system (44) under different \(\eta \) and \(\xi \). As can be seen from the Fig. 11, different selection of transformation parameters will lead to changes in the state of z(t), which will also indirectly lead to changes in the norm of the whole system. Figure 12 illustrates this point. Therefore, according to the theorem in this paper, it can be seen that when the norm of the whole system changes, the upper bound of the perturbation it can withstand can be found to change accordingly. Hence, if only one or zero variable transformation coefficients are considered in this paper, the results are conservative and may not be applicable to all transformations.

The states of system (44) under different coefficients selections

The norm of system (44) under different coefficients selections
6 Conclusion
Through the calculations of upper limits of perturbations, this paper analyzes the RoS of FINNs. This paper derives upper limits of both time delays and stochastic disturbances using the Gronwall-Bellman lemma and various inequality techniques to make the disturbed FINN maintain exponential stability. Limitations between the two forms of disturbances are provided. Examples are provided to validate our findings. Those conclusions reached here provide a solid foundation for applications and designs of TSFCNN. Future study may focus on combining the famous methods like LMI method, Lyapunov theory etc. to reduce the conservative of this paper.
Data availability
No data were used to support this study.
References
Yu F, Kong X, Mokbel AAM, Yao W, Cai S (2023) Complex dynamics, hardware implementation and image encryption application of multiscroll memeristive Hopfield neural network with a novel local active memeristor. IEEE Trans Circuits Syst II Exp Briefs 70(1):326–330
Matei R (2009) New model and applications of cellular neural networks in image processing. In: Advanced technologies. IntechOpen, London, UK
Shu Y (2023) BLF-based neural dynamic surface control for stochastic nonlinear systems with time delays and full-state constraints. Int J Control 25:1–17
Shu Y (2023) Neural dynamic surface control for stochastic nonlinear systems with unknown control directions and unmodelled dynamics. IET Control Theory Appl 17(6):649–661
Alimi AM, Aouiti C, Assali EA (2019) Finite-time and fixed-time synchronization of a class of inertial neural networks with multi-proportional delays and its application to secure communication. Neurocomputing 332:29–43
Villarrubia G, De Paz JF, Chamoso P, la Prieta FD (2018) Artificial neural networks used in optimization problems. Neurocomputing 272:10–16
Durodola JF, Li N, Ramachandra S, Thite AN (2017) A pattern recognition artificial neural network method for random fatigue loading life prediction. Int J Fatigue 99:55–67
Hopfield JJ (1982) Neural networks and physical systems with emergent collective computational abilities. Proc Natl Acad Sci USA 79(8):2554–2558
Chua LO, Yang L (1988) Cellular neural networks: theory. IEEE Trans Circuits Syst 35(10):1257–1272
Chua LO, Yang L-B (1988) Cellular neural networks: applications. IEEE Trans Circuits Syst 35(10):1273–1290
Zeng Z, Wang J, Liao X (2003) Global exponential stability of a general class of recurrent neural networks with time-varying delays. IEEE Trans Circuits Syst I Fundam Theory Appl 50(10):1353–1358
Zhang W, Huang T, Li C, Yang J (2018) Robust stability of inertial BAM neural networks with time delays and uncertainties via impulsive effect. Neural Process Lett 48(1):245–256
Babcock KL, Westervelt RM (1987) Dynamics of simple electronic neural networks. Physica D 28(3):305–316
Song Z, Xu J, Zhen B (2015) Multitype activity coexistence in an inertial two-neuron system with multiple delays. Int J Bifurc Chaos 25(13):1530040
Kumar R, Das S (2020) Exponential stability of inertial BAM neural network with time-varying impulses and mixed time-varying delays via matrix measure approach. Commun Nonlinear Sci 81, Art. no. 105016
Tu Z, Cao J, Alsaedi A, Alsaadi F (2017) Global dissipativity of memristor-based neutral type inertial neural networks. Neural Netw 88:125–133
Lakshmanan S, Prakash M, Lim CP, Rakkiyappan R, Balasubramaniam P, Nahavandi S (2018) Synchronization of an inertial neural network with time-varying delays and its application to secure communication. IEEE Trans Neural Netw Learn Syst 29(1):195–207
Xu C, Zhang Q (2015) Existence and global exponential stability of anti-periodic solutions for BAM neural networks with inertial term and delay. Neurocomputing 153:108–116
Fang W, Xie T, Li B (2023) Robustness analysis of fuzzy BAM cellular neural network with time-varying delays and stochastic disturbances. AIMS Math 8(4):9365–9384
Cao J, Yuan K, Li H-X (2006) Global asymptotical stability of recurrent neural networks with multiple discrete delays and distributed delays. IEEE Trans Neural Netw 17(6):1646–1651
Huang Y, Wu A (2023) Asymptotical stability and exponential stability in mean square of impulsive stochastic time-varying neural network. IEEE Access 11:39394–39404
Aouiti C, Jallouli H, Zhu Q, Huang T, Shi K (2022) New results on finite/fixed-time stabilization of stochastic second-order neutral-type neural networks with mixed delays. Neural Process Lett 54(6):5415–5437
Huang C, Liu B (2019) New studies on dynamic analysis of inertial neural networks involving non-reduced order method. Neurocomputing 325:283–287
Cui Q, Li L, Cao J (2022) Stability of inertial delayed neural networks with stochastic delayed impulses via matrix measure method. Neurocomputing 471:70–78
Wang W, Chen W (2022) Mean-square exponential stability of stochastic inertial neural networks. Int J Control 95(4):1003–1009
Yang T, Yang L-B, Wu CW, Chua LO (1996) Fuzzy cellular neural networks: theory. In: 1996 fourth IEEE international workshop on cellular neural networks and their applications proceedings (CNNA-96), pp 181–186
Yang T, Yang L-B, Wu CW, Chua LO (1996) Fuzzy cellular neural networks: applications. In: 1996 fourth IEEE international workshop on cellular neural networks and their applications proceedings (CNNA-96), pp 225–230
Wang J, Yang C, Xia J, Wu Z-G, Shen H (2021) Observer-based sliding mode control for networked fuzzy singularly perturbed systems under weighted try-once-discard protocol. IEEE Trans Fuzzy Syst 30(6):1889–1899
Wang J, Xia J, Shen H, Xing M, Park JH (2021) \(\cal{H} _{\infty }\) synchronization for fuzzy Markov jump chaotic systems with piecewise-constant transition probabilities subject to PDT switching rule. IEEE Trans Fuzzy Syst 29(10):3082–3092
Fang W, Xie T, Li B (2023) Robustness analysis of fuzzy BAM cellular neural network with time-varying delays and stochastic disturbances. AIMS Math 8(4):9365–9384
Wenxiang F, Tao X, Biwen L (2023) Robustness analysis of fuzzy cellular neural network with deviating argument and stochastic disturbances. IEEE Access 11:3717–3728
Du F, Lu J-G (2022) Finite-time stability of fractional-order fuzzy cellular neural networks with time delays. Fuzzy Sets Syst 438:107–120
Aravind V, Balasubramaniam P (2022) Global asymptotic stability of delayed fractional-order complex-valued fuzzy cellular neural networks with impulsive disturbances. Appl Math Comput 25:1–19
Yao X, Liu X, Zhong S (2021) Exponential stability and synchronization of Memristor-based fractional-order fuzzy cellular neural networks with multiple delays. Neurocomputing 419:239–250
Chen D, Kong F (2021) Delay-dependent criteria for global exponential stability of time-varying delayed fuzzy inertial neural networks. Neural Process Lett 53(1):49–68
Shen Y, Wang J (2012) Robustness analysis of global exponential stability of recurrent neural networks in the presence of time delays and random disturbances. IEEE Trans Neural Netw Learn Syst 23(1):87–96
Si W, Xie T, Li B (2021) Further results on exponentially robust stability of uncertain connection weights of neutral-type recurrent neural networks. Complexity 2021:6941701
Si W, Xie T, Li B (2021) Exploration on robustness of exponentially global stability of recurrent neural networks with neutral terms and generalized piecewise constant arguments. Discrete Dyn Nat Soc 2021:1–13
Si W-X, Xie T, Li B-W (2021) Robustness analysis of exponential stability of neutral-type nonlinear systems with multi-interference. IEEE Access 9:116015–116032
Fang W, Xie T, Li B (2023) Robustness analysis of BAM cellular neural network with deviating arguments of generalized type. Discrete Dyn Nat Soc 2023:1–16
Chen D, Kong F (2021) Delay-dependent criteria for global exponential stability of time-varying delayed fuzzy inertial neural networks. Neural Process Lett 53(1):49–68
Wang W, Chen W (2020) Mean-square exponential stability of stochastic inertial neural networks. Int J Control 95(4):1003–1009
Wenxiang F, Tao X, Biwen L (2023) Robustness analysis of fuzzy cellular neural network with deviating argument and stochastic disturbances. IEEE Access 11:3717–3728
Acknowledgements
The authors thank everyone who provided helpful suggestions for this article. This work was not supported by any Foundations.
Author information
Authors and Affiliations
Contributions
WF:Investigation, Writing original draft, and Validation; TX: Supervision, Review & Editing.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there are no conflicts of interest regarding the publication of this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Fang, W., Xie, T. Robustness analysis of exponential stability of fuzzy inertial neural networks through the estimation of upper limits of perturbations. Neural Process Lett 56, 119 (2024). https://doi.org/10.1007/s11063-024-11587-z
Accepted:
Published:
DOI: https://doi.org/10.1007/s11063-024-11587-z