
Abstract
Near resonance behavior of a shaft-rotor system driven by a motor with limited power gives rise to the Sommerfeld effect wherein the rotor speed gets stuck till a specific level of excitation power is reached. In this paper, a semi-analytical method is used to observe the Sommerfeld effect of a two-disk rotor system driven through a direct current motor. The effect of relative unbalance position on vibration amplitude of a two disk rotor-shaft system is studied in detail. We observe the change in critical power input for passage through resonance by changing the unbalance positions on the disks. We also investigate the case where two close resonance frequencies interfere with the jump phenomenon associated with the Sommerfeld effect. Prediction of critical power input in complex rotor system is highly essential. Else the system may be destroyed due to large vibration amplitudes generated during operations. In this article, drive and rotor dynamics are modeled together by using multi-energy domain bond graph approach and theoretically obtained steady-state characteristics are validated through transient simulations.



















Similar content being viewed by others
References
El-Badawy AA (2007) Behavioral investigation of a nonlinear nonideal vibrating system. J Vib Control 13(2):203–217
Kononeko VO (1964) Vibrating system with limited excitation. Nauka, Moscow (in Russian)
Nayfeh A, Mook DT (1979) Nonlinear oscillations. Wiley, New York
Sommerfeld A (1902) Beiträge Zum Dynamischen Ausbau Der Festigkeitslehe. Phys Zeitschr 3:266–286
Karthikeyan M, Bisoi A, Samantaray AK, Bhattacharyya R (2015) Sommerfeld effect characterization in rotors with non-ideal drive from ideal drive response and power balance. Mech Mach Theory 91:269–288
Balthazar JM, Mook DT, Weber HI, Brasil RMLRF, Fenili A, Belato D, Felix JLP (2003) An overview on non-ideal vibrations. Meccanica 38:613–621
Dantas MJH, Balthazar JM (2004) On local analysis of oscillations of a non-ideal and non-linear mechanical model. Meccanica 39(4):313–330
Bolla MR, Balthazar JM, Felix JLP, Mook DT (2007) On an approximate analytical solution to a nonlinear vibrating problem, excited by a nonideal motor. Nonlinear Dyn 50(4):841–847
Felix JLP, Balthazar JM (2008) Comments on a nonlinear and nonideal electromechanical damping vibration absorber, Sommerfeld effect and energy transfer. Nonlinear Dyn 55(1–2):1–11
Samantaray AK (2008) Steady-state dynamics of a non-ideal rotor with internal damping and gyroscopic effects. Nonlinear Dyn 56(4):443–451
Felix JLP, Balthazar JM, Brasil RMLRF (2009) A short note on transverse vibrations of a shaft carrying two (or one) disk excited by a nonideal motor. J Comput Nonlinear Dyn 4(1):014501
Samantaray AK, Dasgupta SS, Bhattacharyya R (2010) Bond graph modeling of an internally damped nonideal flexible spinning shaft. J Dyn Syst Meas Control 132(6):061502
Dasgupta SS, Samantaray AK, Bhattacharyya R (2010) Stability of an internally damped non-ideal flexible spinning shaft. Int J Non Linear Mech 45(3):286–293
Krasnopolskaya TS, Shvets AY (1993) Chaos in vibrating systems with a limited power-supply. Chaos 3(3):387–395
Verichev NN, Verichev SN, Erofeyev VI (2008) Chaotic dynamics of simple vibrational systems. J Sound Vib 310(3):755–767
Cvetićanin L (2010) Dynamics of the non-ideal mechanical systems: a review. J Serb Soc Comput Mech 4(2):75–86
Pantaleone J (2002) Synchronization of metronomes. Am J Phys 70(10):992–1000
Blekhman II (1988) Synchronization in science and technology. ASME Press, New York
Nanha Djanan AA, Nana Nbendjo BR, Woafo P (2015) Self-synchronization of two motors on a rectangular plate and reduction of vibration. J Vib Control 21(11):2114–2123
Balthazar JM, Felix JLP, Brasil RMLRF (2004) Short comments on self-synchronization of two non-ideal sources supported by a flexible portal frame structure. J Vib Control 10(12):1739–1748
Dimentberg MF, Cobb E, Mensching J (2001) Self-synchronization of transient rotations in multiple shaft systems. J Vib Control 7(2):221–232
Dimentberg MF, McGovern L, Norton RL, Chapdelaine J, Harrison R (1997) Dynamics of an unbalanced shaft interacting with a limited power supply. Nonlinear Dyn 13:171–187
Kim YB, Noah ST, Choi YS (1991) Periodic response of two-disk rotors with bearing clearances. J Sound Vib 144:381–395
Rao JS, Sharan AM (1994) The calculation of the natural frequencies of two-disk-rotor systems using the influence coefficient method including the gyroscopic effects. Mech Mach Theory 29:739–748
Chiu YJ, Chen DZ (2011) The coupled vibration in a rotating two-disk rotor system. Int J Mech Sci 53(1):1–10
Chouksey M, Dutt JK, Modak SV (2012) Modal analysis of rotor-shaft system under the influence of rotor-shaft material damping and fluid film forces. Mech Mach Theory 48:81–93
Ma H, Li H, Zhao X, Niu H, Wen B (2013) Effects of eccentric phase difference between two discs on oil-film instability in a rotor–bearing system. Mech Syst Signal Process 41(1–2):526–545
Genta G (1985) Consistent matrices in rotor dynamics. Meccanica 20:235–248
Filippov AP (1971) Vibrations of mechanical systems. National Lending Library for Science and Technology, Boston Spa
Dasgupta SS (2011) Sommerfeld effect in internally damped shaft-rotor systems, PhD Thesis, IIT Kharagpur
Mukherjee A, Samantaray AK (1997) Umbra-Lagrange’s equations through bond graphs. In: Proceedings of the International Conference on Bondgraph Modelling, SIMULATION Series, vol 29, no. 1. Phoenix, AZ, pp 168–174
Mukherjee A, Rastogi V, Dasgupta A (2009) Extension of Lagrangian-Hamiltonian mechanics for continuous systems—investigation of dynamics of a one-dimensional internally damped rotor driven through a dissipative coupling. Nonlinear Dyn 58(1–2):107–127
Gonçalves PJP, Silveira M, Petrocino EA, Balthazar JM (2016) Double resonance capture of a two-degree-of-freedom oscillator coupled to a non-ideal motor. Meccanica 51(9):2203–2214
Bou-Rabee NM, Marsden JE, Romero LA (2004) Tippe top inversion as a dissipation-induced instability. SIAM J Appl Dyn Syst 3(3):352–377
Krechetnikov R, Marsden JE (2006) On destabilizing effects of two fundamental non-conservative forces. Phys D Nonlinear Phenom 214(1):25–32
Samantaray AK, Dasgupta SS, Bhattacharyya R (2010) Sommerfeld effect in rotationally symmetric planar dynamical systems. Int J Eng Sci 48(1):21–36
Karnopp DC, Margolis DL, Rosenberg RC (2006) System dynamics: modeling and simulation of mechatronic systems. Wiley, New York
Borutzky W (2010) Bond graph methodology development and analysis of twodisciplinary dynamic system models. Springer, Berlin
Merzouki R, Samantaray AK, Pathak PM, Bouamama BO (2012) Intelligent mechatronic systems: modeling, control and diagnosis. Springer, Berlin
Mukherjee A, Karmakar R, Samantaray AK (2012) Bond graph in modeling, simulation and fault identification. CRC Press, Boca Raton, FL
Bisoi A, Samantaray AK, Bhattacharyya R (2017) Sommerfeld effect in a gyroscopic overhung rotor-disk system. Nonlinear Dyn 88:1565–1585
Mukherjee A, Karmakar R, Samantaray AK (1999) Modelling of basic induction motors and source loading in rotor–motor systems with regenerative force field. Simul Pract Theory 7:563–576
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Appendices
Appendix 1
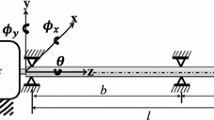
The disc locations are specified as \(a_{1} = 0.3{\text{ m}}\), \(b_{1} = 0.6{\text{ m}}\), \(a_{2} = 0.7{\text{ m}}\), \(b_{2} = 0.2{\text{ m}}\), with \(a_{1} + b_{1} = a_{2} + b_{2} = L\) (Fig. 20). The expressions for influence coefficients in Eqs. (1, 2) are given as follows:

Load and deflection location definitions for computation of influence coefficients
Appendix 2
The sub-matrices of \(\left[ {\mathbf{A}} \right]_{16 \times 16}\) in Eq. (22) are detailed as follows:
\(\left[ {{\mathbf{A}}_{{\mathbf{3}}} } \right] = \left[ I \right]_{8 \times 8}\) and \(\left[ {{\mathbf{A}}_{{\mathbf{4}}} } \right] = \left[ 0 \right]_{8 \times 8}\).
Appendix 3
The 16 numbers of equations after separating the \(\cos \left( {\omega t} \right)\) and \(\sin \left( {\omega t} \right)\) parts as detailed in Sect. 2.3 are
Rights and permissions
About this article

Cite this article
Bisoi, A., Samantaray, A.K. & Bhattacharyya, R. Sommerfeld effect in a two-disk rotor dynamic system at various unbalance conditions. Meccanica 53, 681–701 (2018). https://doi.org/10.1007/s11012-017-0757-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-017-0757-3