
Abstract
In this article, global stabilization results for the Benjamin–Bona–Mahony–Burgers’ (BBM–B) type equations are obtained using nonlinear Neumann boundary feedback control laws. Based on the \(C^0\)-conforming finite element method, global stabilization results for the semidiscrete solution are also discussed. Optimal error estimates in \(L^\infty (L^2)\), \(L^\infty (H^1)\) and \(L^\infty (L^\infty )\)-norms for the state variable are derived, which preserve exponential stabilization property. Moreover, for the first time in the literature, superconvergence results for the boundary feedback control laws are established. Finally, several numerical experiments are conducted to confirm our theoretical findings.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Consider the Benjamin–Bona–Mahony–Burgers’ (BBM–B) equations of the following type: seek \(u=u(x,t),\, x\in I=(0,1)\) and \(t>0\) which satisfies
where, the dispersion coefficient \(\mu >0\) and the dissipative coefficient \(\nu >0\) are constants; \(v_0\) and \(v_1\) are scalar control inputs. The problem (1.1) describes the unidirectional propagation of nonlinear dispersive long waves with dissipative effect. In case, \(\nu =0\) and \(\mu >0,\) the equation (1.1) is known as Benjamin–Bona–Mahony (BBM) equation. When \(\mu =0\) and \(\nu >0\) in (1.1), then it is called Burgers’ equation. For mathematical modeling and physical applications of (1.1), see [2, 3, 21] and references, therein.
Based on distributed and Dirichlet boundary control in feedback form through Riccati operator, local stabilization results for the Burgers’ equation with sufficiently small initial data are established in [4, 5]. Moreover, for local stabilization results using Neumann boundary control, we refer to [7, 8, 11, 12]. For different behavior of steady state solution with anti-symmetric initial condition, see [6]. It is to be noted that for viscous Burgers’ equation, global existence and uniqueness results with Dirichlet and Neumann boundary conditions are derived for any initial data in \(L^2\) in [18]. Subsequently, based on nonlinear Neumann and Dirichlet boundary control laws, global stabilization results for the Burgers’ equation are proved using a suitable application Lyapunov type functional in Krstic [14], Balogh and Krstic [1]. Later on, adaptive (when \(\nu \) is unknown) and nonadaptive (when \(\nu \) is known) stabilization results for generalized Burgers’ equations are established in [17, 24, 25] with different types of boundary conditions. For existence of solution to the problem (1.1)–(1.4), when \(\mu =0\), we refer to [1, 17].
For stabilization of the BBM–B equation, the authors in [10] have shown global stabilization results corresponding to \(\mu =1\) with zero Dirichlet boundary condition at one end and Neumann boundary control on the other end. Using a reduced order model, distributed feedback control for the BBM–B equation is discussed in [22]. Also, quadratic B-spline finite element method followed by linear quadratic regulator theory to design feedback control, is used to stabilize in [23] without any convergence analysis. In [15], we have shown that, under the uniqueness assumption of the steady state solution, the steady state solution of the problem (1.1) with zero Dirichlet boundary condition is exponentially stable.
In this paper, we discuss global stabilization results using nonlinear Neumann feedback control law. Our second objective is to apply \(C^0\)-finite element method to the stabilization problem (1.1)–(1.4) using nonlinear Neumann boundary control laws and discuss convergence analysis. Since to the best of our knowledge, there is hardly any discussion in the literature on the rate of convergence, hence, in this paper, an effort has been made to prove optimal order of convergence of the state variable along with superconvergence result for the feedback control laws. The main contributions of this article are summarized as:
-
Global stabilization for problem (1.1)–(1.4), that is, convergence of the unsteady solution to the problem (1.1) to its constant steady state solution under nonlinear Neumann boundary control laws (1.2)–(1.3) is proved (see Theorem 2.1).
-
Based on the \(C^0\)-conforming finite element method, global stabilization results for the semidiscrete solution are discussed and optimal error estimates are established in \(L^\infty (L^2)\), \(L^\infty (H^1(0,1))\), and \(L^\infty (L^\infty )\) norms for the state variable. Moreover, superconvergence results are derived for the nonlinear Neumann feedback control laws (see Theorems 3.1 and 3.2).
-
Finally, some numerical experiments are conducted to confirm our theoretical results.
For related issues of finite element analysis of the viscous Burgers’ equation using nonlinear Neumann boundary feedback control law, we refer to our recent article [16]. Compared to [16], special care has been taken to establish global stabilization results in \(L^\infty (H^i(0,1)) (i=0, 1, 2)\) norms as \(\mu \rightarrow 0.\) It is further observed that the decay rate for the BBM–B type equation is less than the decay rate for the viscous Burgers’ equation and as the dispersion coefficient \(\mu \) approaches zero, the decay rate also converges to the decay rate for the Burgers’ equation. Finite element error analysis holds for fixed \(\mu \).
For the rest of this article, we denote \(H^m\) by \(H^m(0,1)\) the standard Sobolev spaces with norm \(\left\| \cdot \right\| _m\) and for \(m=0\), \(\left\| \cdot \right\| \) denotes the corresponding \(L^2\) norm. For more details, see e.g. [13]. The space \(L^p((0,T);X)\)\(1\le p\le \infty , \) consists of all strongly measurable functions \(v:(0,T) \rightarrow X \) with norm
and
When there is no confusion, \(L^p((0,T);X)\) is simply denoted by \(L^p(X)\). Throughout the paper, we use the following norm which is equivalent to the usual \(H^1\)-norm for \(z\in H^1(0,1)\):
We now recall some results to be use in our subsequent sections.
Lemma 1.1
Poincaré–Wirtinger’s inequality For any \(z\in H^1(0,1)\), the following inequality holds:
Using Agmon’s and Poincaré inequality, the following inequality holds
where \(\left| \! \left| \! \left| \cdot \right| \! \right| \! \right| \) is given in (1.5).
The equilibrium or steady state solution \(u^\infty \) of (1.1)–(1.3) satisfies
Note that any constant \(w_d\) is a solution of the steady state problem (1.7)–(1.8). Without loss of generality, we assume that \(w_d\ge 0\).
Set \(w=u-w_d,\) which satisfies
where, w is the state variable and \(v_0\) and \(v_1\) are feedback control variables. Since for the problem with zero Neumann boundary condition, the steady state constant solution \(w_d\) is not asymptotically stable, we plan to achieve stabilization result through boundary feedback law. The present analysis can be easily extended to the problem with one side control law say for example: when \(w(0,t)=0\), \(w_x(1,t)=v_1(t)\), see [10]. For motivation to choose the control laws \(v_{0}(t)\) and \(v_{1}(t)\) using construction of Lyapunov functional, see [14].
Based on the nonlinear Neumann control law propose in our earlier article for Burgers’ equation, see [16], which is a modification of control law in [14], we now choose the feedback control law as
and
where \(K_0\) and \(K_1\) represent feedback control laws, and \(c_0\) and \(c_1\) are positive constants.
The variational formulation of the problem (1.9)–(1.12) is to seek \(w\in L^\infty (H^1),\)\(w_t \in L^2(L^2)\) and \(\mu w_t\in L^2(H^1)\) such that for almost all \(t>0\)
with \(w(x,0)=w_0(x).\)
Using (1.13)–(1.14), we obtain a typical nonlinear problem (1.9)–(1.12) with boundary conditions (1.13)–(1.14). Its weak formulation (1.15) becomes
Throughout the paper \(C=C(\left\| w_0\right\| _2,\nu ,\mu )\) is a generic positive constant. Bellow, we make the following assumptions
Assumption \({\mathbf{(A1)}}\)
Compatibility conditions at \(t=0\) (\(w_{0x}(0)=v_0(0)\), \(w_{0x}(1)=v_1(0)\), \(w_{0xt}(0)=v_{0t}(0)\), \(w_{0xt}(1)=v_{1t}(0)\)) with \(w_0(\cdot )\in H^2\) are satisfied.
Assumption \({\mathbf{(A2)}}\)
There exist unique weak solution w of (1.9)–(1.12) satisfying the following regularity result
Subsequently for our error estimates in \(L^\infty (L^\infty )\) norm, we further assumed that \(w(t)\in W^{2,\infty }\) with its norm denoted by \(\left\| \cdot \right\| _{2,\infty }\).
Regarding assumption \(\mathbf{(A2)}\) on existence, uniqueness and regularity results, the proof of existence and uniqueness result can be easily modeled on the lines of proof of Theorems 1.1 and 2.1 of [19], but the constants appeared there may depend on \(1/\mu ^r,\;r\ge 1.\) Therefore, using Bubnov-Galerkin methods and similar a priori bounds as in Theorems 2.1 and 2.2 for the weak solution u of (1.9)–(1.12) with compactness arguments of J.L. Lions, it is possible to rewrite the existential proof so that the constants involved are valid uniformly in \(\mu \) as \(\mu \mapsto 0.\) We also observe that as a consequence of Lemma 2.6, we obtain easily uniqueness result. Further, we note that using eigenfunction expansion, Galerkin approximation and taking limit as in the regularity Theorem 2.1 of [19], proper meaning can be attached to regularity estimates in Lemmas 2.2–2.5. For more details, see, the appendix. Note that we need compatibility conditions in (A1) in the proofs of regularity results for Lemmas 2.4–2.5.
The rest of the article is organized as follows. Section 2 deals with global stabilization results and the existence and uniqueness of strong solution. Section 3 is devoted to optimal error estimates for the semidiscrete solution with superconvergence results for feedback controllers. Finally in Sect. 4, some numerical examples are considered to confirm our theoretical results.
2 Stabilization and Continuous Dependence Result
In this subsection, we discuss a priori bounds for the problem (1.16) and derive stabilization results and its main Theorem 2.1. In addition, these estimates are needed to prove optimal error estimates for the state variable and feedback controllers. All estimates throughout the paper are valid for the same \(\alpha \) with
Lemma 2.1
Under assumptions \(\mathbf{(A1)}\)–\(\mathbf{(A2)},\) there holds for \(t>0\)
where \(\alpha \) is given in (2.1),
and
Proof
Set \(\chi =w\) in the weak formulation (1.16) to obtain
where \(E_1(w)(t)\) is given in (2.3). A use of Young’s inequality for the right hand side term shows
Therefore, using (2.5) and (2.3), we obtain from (2.4)
Multiply (2.6) by \(e^{2\alpha t}\) to arrive at
A use of Poincaré-Wirtinger’s inequality yields
Substitute (2.8) in (2.7) and expanding \(E_1(w)(t)\) to find that
Now choose \(\alpha \) as in (2.1), so that all the coefficients on the left hand side are positive. Then integrating the above inequality from 0 to t and multiplying the resulting inequality by \(e^{-2\alpha t},\) we obtain
This completes the proof. \(\square \)
Remark 2.1
Since
we obtain from Lemma 2.1
When \(\alpha =0,\) Lemma 2.1 holds for all \(t>0\), that is,
Lemma 2.2
Under assumptions \(\mathbf{(A1)}\)–\(\mathbf{(A2)}\), there is a positive constant C such that for \(t>0\)
where \(E_2(w)(t)=\Big ((c_0+1+w_d)+\frac{1}{9c_0}w^2(0,t)\Big )w^2(0,t)+\Big ((c_1+1+w_d) +\frac{1}{9c_1}w^2(1,t)\Big )w^2(1,t).\)
Proof
Forming the \(L^2\)- inner product between (1.9) and \(-w_{xx},\) we obtain
After substituting (1.13)–(1.14) in (2.10), the contributions of the boundary terms in (2.10) are
The terms on the right hand side of (2.10) are now bounded by
and
Using (2.10) we arrive at
Multiplying the above inequality by \(e^{2\alpha t},\) and using
and \(E_2(w)(t)\le E_1(w)(t)\) we obtain
A use of Gronwall’s inequality now yields
From Remark 2.1 and Lemma 2.1, we bound the right hand side term of (2.13). Therefore, after multiplying (2.13) by \(e^{-2\alpha t},\) we obtain
Since the terms in the bracket in the exponential form are bounded, this completes the rest of the proof. \(\square \)
Lemma 2.3
Let assumptions \(\mathbf{(A1)}\)–\(\mathbf{(A2)}\) hold true. Then, there exists a positive constant C such that for \(t>0\)
where
Proof
Set \(\chi =w_t\) in the weak formulation (1.16) to obtain
where \(E_3(w)(t)\) is given in (2.14). Note that
and
Therefore, from (2.15), we arrive at
Multiply the above inequality by \(e^{2\alpha t}\). Now, a use of the Gronwall’s inequality and Lemma 2.1 completes the rest of the proof. \(\square \)
Lemma 2.4
Under assumptions \(\mathbf{(A1)}\) and \(\mathbf{(A2)},\) there holds for \(t>0\)
where \(E_3(w)(t)\) is as in (2.14).
Proof
Differentiating (1.9) with respect to t and then taking the inner product with \(\chi =w_t\), we obtain
The other terms in (2.16) are bounded by
and
Therefore, from (2.16), we arrive at
Now multiply the above inequality by \(e^{2\alpha t}\) to obtain
By the Gronwall’s inequality, it follows from above with a use of Lemmas 2.1 and 2.3 that
Also after putting \(\chi =w_t\) in the weak formulation (1.16), we arrive at
Therefore, we can find the value of \(\left\| w_t(t)\right\| ^2+\mu \left\| w_{xt}(t)\right\| ^2+\frac{\mu }{\nu }E_3(w)(t)\) at \(t=0\) as
Hence, we arrive at
Multiply the above inequality by \(e^{-2\alpha t}\) to complete the proof. \(\square \)
Lemma 2.5
Let assumptions \(\mathbf{(A1)}\) and \(\mathbf{(A2)}\) hold. Then, there is a positive constant C such that for \(t>0\)
Proof
Form the \(L^2\)-inner product between (1.9) and \(-w_{xxt}\) to obtain
where we use the bound of \(w^2(i,t)\) and \(w^4(i,t)\) for \(i=0,\,1\) from Lemma 2.2.
Multiply (2.17) by \(e^{2\alpha t}\) to obtain
Integrate from 0 to t and then multiply the resulting inequality by \(e^{-2\alpha t}\) with a use of Lemmas 2.2 and 2.4 to arrive at
This completes the proof. \(\square \)
Now combining the above lemmas, we get the global stabilization result in the following theorem.
Theorem 2.1
Under assumptions \(\mathbf{(A1)}\) and \(\mathbf{(A2)},\) there holds for \(t>0\)
Proof
Proof follows from Lemmas 2.1–2.5. \(\square \)
2.1 Continuous Dependence Property
Below, we show a continuous dependence property from which uniqueness follows.
Lemma 2.6
For two different initial conditions \(w_{10}(\cdot )\) and \(w_{20}(\cdot )\)\(\in H^1(0,1),\) the following continuous dependence property holds for \(t>0\)
where \(z=w_1-w_2\) satisfies (2.19)–(2.22); \(w_1\) and \(w_2\) be two solutions of (1.9) with boundary conditions (1.13), (1.14) and initial conditions \(w_{10}\) and \(w_{20}\), and
Proof
Since \(z=w_1-w_2\), z satisfies
In its weak formulation, seek \(z\in H^1\) such that
Set \(v=z\) in (2.23), and bound the fourth and fifth terms on the left hand side, respectively, as
and
Now to bound the other terms on the left hand side of (2.23), we rewrite the following terms as for \(i=0,\,1\)
and
Therefore, from (2.23), we arrive at
Using (2.18), we obtain
Applying Gronwall’s inequality to the above inequality yields
A use of Lemmas 2.2–2.4 gives the desired result. \(\square \)
As a consequence, when \(w_{10}=w_{20},\) it follows that \(w_1(t)=w_2(t)\) for all \(t>0\). Hence, the solution is unique.
3 Finite Element Approximation
In this section, we discuss semidiscrete Galerkin approximation keeping the time variable continuous. Moreover, optimal error estimates for the state variable and superconvergence results for feedback controllers are established.
For any positive integer N, let \(\Pi =\left\{ 0 = x_0< x_1<\cdots < x_{N} = 1\right\} \) be a partition of \({\overline{I}}\) into subintervals \(I_j = (x_{j-1} , x_j ),\, 1\le j \le N \) with \(h_j = x_j-x_{j-1}\) and mesh parameter \(h = \max \limits _{1\le j\le N }h_j\). We define a finite dimensional subspace \(V_h\) of \(H^1\) as follows
where \({\mathcal {P}}_{1}(I_j)\) is the set of linear polynomials in \(I_j\).
Now, the corresponding semidiscrete formulation for the problem (3.3)–(3.6) is to seek \(w_h\in H^1(V_h)\) such that
with \(w_h(x,0)=w_{0h}(x),\) an approximation of \(w_0\). For our analysis, we assume that \(w_{0h}\) is the \(H^1\) projection of \(w_0\) onto \(V_h\).
Now since \(V_h\) is finite dimensional, the semidiscrete problem (3.1) leads to a system of nonlinear ODEs. Then an appeal to the Picard’s theorem yields the existence of a unique solution \(w_h(t)\) in \(t\in (0,t^*)\) for some \(t>0\). Since from Lemma 3.1, \(w_h(t)\) is bounded for all \(t>0,\) using a continuation argument, the global existence of \(w_h(t)\) is established.
Below, we state four Lemmas for the semidiscrete problem (1.9)–(1.12), which imply global stabilization result for the semidiscrete solution.
Lemma 3.1
Under the assumptions \(\mathbf{(A1)}\)–\(\mathbf{(A1)}\) and \(\alpha \) as in (2.1), there holds for \(t>0\)
where
and \(\beta \) is the same as in (2.2).
Proof
For the proof we can proceed as in continuous case. \(\square \)
One dimensional discrete Laplacian\(\Delta _h:V_h\longrightarrow V_h\) is defined by
The semidiscrete version of the control problem (1.9)–(1.12) satisfies
where following estimates hold:
Using (3.7), we can show that \(\left\| w_{0h}\right\| \le \left\| w_{0}\right\| \) and \(\left\| w_{0hx}\right\| \le \left\| w_{0x}\right\| \). For showing the bound of \(\left\| \Delta _h w_{0h}\right\| ,\) we rewrite
Choose \({{\tilde{w}}}_h(0)=w_{0h}\) so that from Lemma 3.5, we obtain the bound of \(|w_{0x}(0)-w_{0hx}(0)|\) and \(|w_{0x}(1)-w_{0hx}(1)|\). Now a use of inverse inequality yields \(\left\| \Delta _h w_{0h}\right\| \le C\left\| w_{0xx}\right\| \) easily.
Lemma 3.2
Under the assumptions \(\mathbf{(A1)}\)–\(\mathbf{(A2)}\), there exists a positive constant C such that for \(t>0\)
where
Lemma 3.3
Let assumptions \(\mathbf{(A1)}\)- \(\mathbf{(A2)}\) hold. Then, there is a positive constant C such that for \(t>0\)
where
Lemma 3.4
Under the assumptions \(\mathbf{(A1)}\) and \(\mathbf{(A2)},\) there holds for \(t>0\)
where \(E_{3h}(w_h)(t)\) is as in previous Lemma 3.3.
Remark 3.1
The proofs of the above Lemmas 3.2–3.4 follows in a similar fashion as in continuous case. Also for \(\alpha =0,\) all results in these lemmas hold.
3.1 Error Estimates
To bound the error, we first introduce an auxiliary projection \({{\tilde{w}}}_h(t) \in V_h\) of w(t) through the following form
where \(\lambda \) is some fixed positive number. For a given \(w(t)\in H^1,\) the existence of a unique \({{\tilde{w}}}_h(t)\) follows from the Lax–Milgram Lemma. Let \(\eta :=w-{{\tilde{w}}}_h\) be the error involved in the auxiliary projection. Then, the following standard error estimates hold
and
For a proof, we refer to Thomée [26]. In addition, for proving optimal error estimates, we need the following estimates of \(\eta \) and \(\eta _t\) at the boundary points \(x=0,1\) whose proof can be found in [9, 16, 20].
Lemma 3.5
For \(x=0,1,\) there holds for \(t>0\)
Using elliptic projection, write
Choose \({{\tilde{w}}}_h(0)=w_{0h}\) so that \(\theta (0)=0\).
Since estimates of \(\eta \) are known, it is enough to estimate \(\theta \). Subtracting (3.1) from (1.16) and using (3.8), we arrive at
where \(w^3(i,t)-w_h^3(i,t)\) for \(i=0,\,1\) can be rewritten as
Lemma 3.6
Let assumptions \(\mathbf{(A1)}\) and \(\mathbf{(A2)}\) hold true. Then, there exists a positive constant C independent of h such that for \(t>0\)
where \(\beta _1=\min \Bigg \{(\frac{3\nu }{2}-2\alpha (\mu +1)), \Big (1-2\alpha \big (\frac{2\mu }{\nu }+1\big )\Big )\Bigg \}>0\).
Proof
Set \(\chi =\theta \) in (3.11) to obtain
where \(I_4(\theta )\) and \(I_5(\theta )\) are last two summation term respectively. The first term on the right hand side of (3.12) is bounded using the Cauchy-Schwarz inequality and the Young’s inequality in
where constant \(\epsilon >0\) we choose later. For the second term on the right hand side of (3.12), integration by parts, the Cauchy-Schwarz inequality, and Young’s inequality yield
For the third term, we note that
First subterms of the fourth and fifth term on the right hand side of (3.12) are bounded by
For second subterm of the fourth term on the right hand side, we note that for \(i=0,\,1\)
Using Young’s inequality, implies that for \(i=0,\,1\)
and
Again, a use of Young’s inequality yields
Hence, the contribution of the second subterm of the fourth term on the right hand side of (3.12) after applying Lemmas 2.2, 2.4 and 3.5, can be bounded as
Expanding the second subterm of the fifth term, we note that for \(i=0,\,1\)
and using Lemmas 2.2 and 2.4, we obtain
Also, it holds that
Rewrite and use the Young’s inequality to obtain
Similarly,
Hence, from (3.12), we arrive using Lemmas 2.2, 2.4, 3.2, 3.4 and 3.5 at
Multiply the above inequality by \(e^{2\alpha t}\). Use Poincaré–Wirtinger’s inequality
with
This yields
where \(\phi (t)=\left| \! \left| \! \left| w(t) \right| \! \right| \! \right| ^2+\left\| w_{xx}(t)\right\| ^2+\left\| \Delta _hw_h(t)\right\| ^2\). Now integrate from 0 to t and choose \(\epsilon =\frac{\beta _1}{2}\) with
to find that
where \(\psi (t)=\sum _{i=0}^{1}\Big (w^2(i,t)+w_t^2(i,t)+w_h^2(i,t)+\mu w_{ht}^2(i,t)\Big )\). Then, an application of Gronwall’s inequality to (3.14) shows
Multiplying (3.15) by \(e^{-2\alpha t}\) and using Lemmas 2.2, 2.4, 3.2 and 3.4 with \(\alpha =0,\) it follows that
This completes the proof. \(\square \)
Lemma 3.7
Under assumptions \(\mathbf{(A1)}\) and \(\mathbf{(A2)},\) there exists a positive constant C independent of h such that for \(t>0\)
Proof
Set \(\chi =\theta _t\) in (3.11) to obtain
The first term on the right hand side of (3.16) is bounded by
For the second term \(I_2(\theta _t),\) first rewrite it as
A use of Young’s inequality shows
For the third term \(I_3(\theta _t)\) on the right hand side of (3.16), we first rewrite it as
and then an application of Young’s inequality with Lemmas 2.2, 2.4 and 3.2 yields
The first subterm of the fourth term \(I_4(\theta _t)\) on the right hand side of (3.16) can be rewritten for \(i=0,\,1\) as
For second subterm of the fourth term on the right hand side, we note that for \(i=0,\,1\)
Using Lemma 2.2, it follows that for \(i=0,\,1\)
and
Also, we obtain for \(i=0,\,1\)
We note that for \(i=0,\,1\)
The first subterm of the fifth term \(I_5(\theta _t)\) on the right hand side is bounded by
For the second subterm of the fifth term \(I_5(\theta _t),\) we note that for \(i=0,\,1\)
Using Lemmas 2.2 and 3.5, it follows that for \(i=0,\,1\)
Also, it is valid using Young’s inequality that for \(i=0,\,1\)
Applying Lemma 3.2, it follows that for \(i=0,\,1\)
Hence, from (3.16), we obtain using Lemmas 2.4 and 3.5
where
Multiply the above inequality by \(e^{2\alpha t}\) and use Lemmas 2.2–2.3, 3.2 and 3.5 with bounds of nonlinear boundary terms as in Lemma 3.6 to arrive at
Integrate from 0 to t and then multiply the resulting inequality by \(e^{-2\alpha t}\) to obtain
A use of the Young’s inequality with Lemma 2.2 shows
Again using the Young’s inequality and Lemma 2.2, we arrive at
Bounding in a similar fashion as in Lemma 3.6, we obtain a bound for the nonlinear boundary terms as follows
Finally, apply Grönwall’s inequality to (3.17) to arrive using Lemmas 2.2, 2.4, 3.1–3.3 and 3.6 at
This completes the proof. \(\square \)
Remark 3.2
As a consequence of Lemma 3.7, we obtain superconvergence result for \(\left| \! \left| \! \left| \theta (t) \right| \! \right| \! \right| \) which depends on \(\frac{1}{\sqrt{\mu }}\). However, for proving optimal estimate, only one modification may be made to compute \(\int _{0}^{t}\left\| \eta _t(t)\right\| ^2\;ds\le Ch^2\int _{0}^{t}\left\| w_{xt}(t)\right\| ^2 \;ds\). Hence, we obtain
which does not depend on \(\frac{1}{\sqrt{\mu }}\). Now using triangle inequality with Lemmas 3.6 and 3.7 and (3.18), we obtain the following result.
Theorem 3.1
Let assumptions \(\mathbf{(A1)}\) and \(\mathbf{(A2)}\) be satisfied. Then, the following error estimates hold for both state and control variables and for \(t>0\)
where \(r=0,1\) and
Proof
The proof follows from Lemmas 2.4, 3.6 and 3.7 with a use of triangle inequality and (3.9). \(\square \)
Theorem 3.2
For \(w_0(\cdot )\in H^2(0,1),\) there exists a constant \(C>0\) such that for \(t>0\)
and
where \(i=0,\) 1.
Proof
From Lemma 3.7, we obtain a superconvergence result for \(\left| \! \left| \! \left| \theta (t) \right| \! \right| \! \right| \). Using the Poincaré–Wirtinger’s inequality, it follows that
Now a use of triangle inequality with estimates of \(\left\| \eta (t)\right\| _{L^\infty }\) and\(\left\| \theta (t)\right\| _{L^\infty },\) we arrive at the estimate (3.20). To find (3.21), we note that the error in the control law is given by
Similarly, it follows that
This completes the proof. \(\square \)
4 Numerical Experiments
In this section, we discuss the fully discrete finite element formulation of (1.9) using backward Euler method with Neumann boundary control laws. Here, the time variable is discretized by replacing the time derivative by difference quotient. Let \(W^n\) be the approximation of w(t) in \(V_h\) at \(t=t_n=nk,\) where \(0<k<1\) denote the time step size and \(t_n=nk,\) and n is nonnegative integer. For smooth function \(\phi \) defined on \([0,\infty ),\) set \(\phi ^n=\phi (t_n)\) and \({\bar{\partial }}_t\phi ^n=\frac{(\phi ^n-\phi ^{n-1})}{k}\).
Using backward Euler method, the fully discrete scheme corresponding \(\{{W^n}\}_{n\ge 1}\in V_h\) is a solution of
with \(W^0=w_{0h}.\) At each time level \(t_n\), the nonlinear algebraic system (4.1) is solved by Newton’s method with initial guess \(W^{n-1}\). For implicit scheme (4.1) in our case, CFL condition is not needed. We take time step \(k=0.0001\) and mesh size \(h=1/60\).
Example 4.1
Here, we have taken the initial guess (exact solution at \(t=0\)) \(w_0=20(0.5-x)^3-3,\) where \(w_d=3\) is a constant steady solution for the original problem. We do not know the exact solution w(t). Choose \(t=[0,3.5]\). We consider zero Neumann boundary condition, which is without control and mark it as uncontrolled solution. Then to check whether constant steady state solution \(w_d=3\) is asymptotically stable, we take nonlinear Neumann boundary feedback controllers which are given in (1.10)–(1.11) for different values of \(c_0\) and \(c_1\) with \(\mu =0.5\) and \(\nu =0.5\).
From the line denoted as ‘Uncontrolled solution’ in Fig. 1, we can clearly observe that \(W^n\) does not go to zero, that is, constant steady state solution \(w_d=3\) is not asymptotically stable with zero Neumann boundaries. We now observe that for various combination of \(c_0\) and \(c_1\), the discrete solution goes to zero exponentially, see Fig. 1. Moreover from Fig. 1, we can see that the optimal decay rate \(\alpha \) (with \(w_d=3\)), \(0<\alpha \le \frac{1}{2}\min \Big \{\frac{\nu }{\mu +1}, \frac{\nu }{2\mu +\nu }, \frac{\nu (4+c_i)}{\nu +(4+c_i)\mu } (i=0,1)\Big \}\) happens when \(c_0=1=c_1\), which verify our theoretical result in Lemma 2.1. When \(c_i(i=0,1)<1\), then decay rate for the state is slow compare to the case when \(c_i(i=0,1)\ge 1\).

Both uncontrolled and controlled solution

Order of convergence plot in \(L^2\) norm for state w

Order of convergence plot in \(L^\infty \) norm for state w

Convergence plot for feedback control error at \(x=0\)

Convergence plot for feedback control error at \(x=1\)

Control plot at \(x=0\)

Control plot at \(x=1\)
Now, we present order of convergence for the error in state variable w(t) in \(L^2\) and \(L^\infty \) norms (\(\left\| w(t_n)-W^N\right\| _{L^2}\) and \(\left\| w(t_n)-W^N\right\| _{L^\infty }\) respectively) and also for the feedback controllers \(v_0(t)\) and \(v_1(t)\) (\(|{v_0(t_n)-v_{0h}(t_n)}|\) and \(|{v_1(t_n)-v_{1h}(t_n)}|\) ) in \(L^\infty \) norm at \(t=1\). Exact solution is obtained through refined mesh solution.
For Figures 2, 3, 4 and 5, in each plot we have also added reference curve for theoretical convergence rate to compare with the numerical rate of convergence. Figures 2 and 3 indicate the error plot for the state variable w in \(L^2\) and \(L^\infty \) norms respectively, for various values of \(c_0\) and \(c_1\). We can easily observe from Figure 2 that the convergence rate in the \(L^2\)- norm for error in state variable is of order 2 as predicted by Theorem 3.1. From Figure 3, it is also noticeable that the order of convergence for error in state variable in \(L^\infty \) norm is 2 as expected from Theorem 3.2.
For error in feedback controllers at \(x=0\) and \(x=1,\) it is observed from Figures 4 and 5 that for various values of \(c_0\) and \(c_1,\) the order of convergence is 2 which confirms the result in Theorem 3.2. In Figures 6 and 7, we present the behavior of the feedback controllers at \(x=0\) and \(x=1\) with respect to time for various positive values of \(c_0\) and \(c_1\). Absolute value of the feedback controllers go to zero as time increases. So for \(c_i(i=0,1)<1\) in the feedback control law, it will take more time for the control and state to settle down to zero (See Figs. 1, 6, 7).
The next example consists of different type feedback control which is stated below. In the following example, we consider the solution of (1.9) with one part zero Dirichlet boundary and another part different Neumann conditions.
Example 4.2
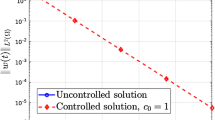
In this example, we consider the solution of (1.9) with different boundary conditions. Take initial condition as \(w_0=15\sin (\pi x)-5\), where 5 is the steady state solution. We choose time \(t=[0,10]\) and the time step \(k=0.0001\) and \(\mu =0.1\) and \(\nu =0.1\).
For the uncontrolled solution, we take \(w(0,t)=0\) and \(w_x(1,t)=0\). The uncontrolled solution is denoted by ‘Uncontrolled solution’ in Figure 8.
For the controlled solution we consider \(w(0,t)=0\) and \(w_x(1,t)=v_1(t)=-\frac{1}{\nu }\Big ((c_1+1+w_d)w(1,t)+\frac{2}{9c_1}w^3(1,t)\Big )\) with \(c_1=0.1, 1 \hbox { and } 10\). Denote the controlled solutions by ‘Controlled solution \(c_1=1\)’, ‘Controlled solution with \(c_1=10\)’, and ‘Controlled solution with \(c_1=0.1\)’ in Fig. 8.

Controlled and Uncontrolled solution plot in \(L^2\) norm
First draw line in Fig. 8 shows that solution with zero boundary conditions (\(w(0,t)=0\) and \(w_x(1,t)=0\)) oscillate. But using above mentioned type of control with different values of \(c_1\), solution goes to zero. With the initial condition of Example 4.2, decay of the state w in \(L^2\)- norm varying \(\mu \) with fixed \(\nu =0.1\), \(c_0=1=c_1\) is shown in Fig. 9. We observe that as \(\mu \) decreases, \(L^2\)- norm of the state w for BBM–B equation converges to the \(L^2\)- norm of the state w with \(\mu =0\) that is to the \(L^2\)- norm of the state of Burgers’ equation.

Decay of state w in \(L^2\) norm as \(\mu \rightarrow 0\)
5 Conclusion
In this article, under the assumption of the existence of solution, we show stabilization estimate in higher order norms which is crucial to obtain optimal error estimates in the context of \(C^0\)- conforming finite element analysis. Optimal error estimates for the state variable w in \(L^\infty (L^2)\), \(L^\infty (H^1)\) and \(L^\infty (L^\infty )\) norms are established. Furthermore, superconvergence results for error in feedback controllers are also proved. Following points which are itemized below will be addressed in a separate paper.
-
When the coefficient of viscosity is unknown (in the case of adaptive control), we believe that the control law as in Smaoui [24] will also work for BBM–B equation. Also when \(\nu =0\), it is interesting to extend the analysis modifying the control law appropriately.
-
In addition, for the fully discrete scheme (4.1), it is interesting to know the large time behavior of the solution and how the corresponding time step size k behaves in error estimates for fully discrete solution in addition to the space step size h.
References
Balogh, A., Krstic, M.: Burgers’ equation with nonlinear boundary feedback: \(H^1\) stability well-posedness and simulation. Math. Probl. Eng. 6, 189–200 (2000)
Benjamin, T.B., Bona, J.J., Mahony, J.J.: Model equations for long Waves in nonlinear dispersive systems. Philos. Trans. R. Soc. Lond. A 272, 47–78 (1972)
Bona, J.L.: Model equations for waves in nonlinear dispersive systems. In: Proceedings of the International Congress of Mathematicians, Helsinki (1978)
Burns, J.A., Kang, S.: A control problem for Burgers’ equation with bounded input/output. Nonlinear Dyn. 2, 235–262 (1991)
Burns, J.A., Kang, S.: A stabilization problem for Burgers’ equation with unbounded control and observation. In: Proceedings of an International Conference on Control and Estimation of Distributed Parameter Systems, Vorau, July 8–14 (1990)
Burns, J.A., Balogh, A., Gilliam, D.S., Shubov, V.I.: Numerical stationary solutions for a viscous Burgers’ equation. J. Math. Syst. Estim. Control 8, 1–16 (1998)
Byrnes, C.I., Gilliam, D.S., Shubov, V.I.: On the global dynamics of a controlled viscous Burgers’ equation. J. Dyn. Control Syst. 4, 457–519 (1998)
Byrnes, C.I., Gilliam, D.S., Shubov, V.I.: Boundary Control for a Viscous Burgers’ Equation. Identification and Control for Systems Governed by Partial Differential Equations, pp. 171–185. SIAM, Philadelphia, PA (1993)
Doss, L.J.T., Pani, A.K., Padhy, S.: Galerkin method for a Stefan-type problem in one space dimension. Numer. Methods Partial Differ. Equ. 13, 393–416 (1997)
Hasan, A., Foss, B., Aamo, O.M.: Boundary control of long waves in nonlinear dispersive systems. In: Australian Control Conference, Melbourne, Australia (2011)
Ito, K., Kang, S.: A dissipative feedback control for systems arising in fluid dynamics. SIAM J. control Optim. 32, 831–854 (1994)
Ito, K., Yan, Y.: Viscous scalar conservation laws with nonlinear flux feedback and global attractors. J. Math. Anal. Appl. 227, 271–299 (1998)
Kesavan, S.: Topics in Functional Analysis and Application. New Age International (P)Ltd Publishers, New Delhi (2008)
Krstic, M.: On global stabilization of Burgers’ equation by boundary control. Syst. Control Lett. 37, 123–141 (1999)
Kundu, S., Pani, A.K., Khebchareon, M.: Asymptotic analysis and optimal error estimates for Benjamin–Bona–Mahony–Burgers type equations. Numer. Methods Partial Differ. Equ. 34, 1053–1092 (2018)
Kundu, S., Pani, A.K.: Finite element approximation to global stabilization of the Burgers’ equation by Neumann boundary feedback control law. Adv. Comput. Math. 44, 541–570 (2018)
Liu, W.J., Krstic, M.: Adaptive control of Burgers equation with unknown viscosity. Int. J. Adapt. Control Signal Process 15, 745–766 (2001)
Ly, H.V., Mease, K.D., Titi, E.S.: Distributed and boundary control of the viscous Burgers’ equation. Numer. Funct. Anal. Optim. 18, 143–188 (1997)
Medeiros, L.A., Miranda, M.M.: Weak solutions for a nonlinear dispersive equation. J. Math. Anal. Appl. 59, 432–441 (1977)
Pani, A.K.: A finite element method for a diffusion equation with constrained energy and nonlinear boundary conditions. J. Aust. Math. Soc. Ser. B 35, 87–102 (1993)
Peregrine, D.H.: Calculations of the development of an undular bore. J. Fluid Mech. 25, 321–330 (1966)
Piao, G.R., Lee, H.C.: Distributed feedback control of the Benjamin–Bona–Mahony–Burgers equation by a reduced-order model. East Asian J. Appl. Math. 5, 61–74 (2015)
Piao, G.R., Lee, H.C.: Iinternal feedback control of the Benjamin–Bona–Mahony–Burgers equation. J. KSIAM 18, 269–277 (2014)
Smaoui, N.: Nonlinear boundary control of the generalized Burgers equation. Nonlinear Dynam. 37, 75–86 (2004)
Smaoui, N.: Boundary and distributed control of the viscous Burgers equation. J. Comput. Appl. Math. 182, 91–104 (2005)
Thomee, V.: Galerkin Finite Element Methods for Parabolic Problems. Springer, Berlin (1997)
Acknowledgements
Open access funding provided by University of Graz. The first author was supported by the ERC advanced Grant 668998 (OCLOC) under the EUs H2020 research program. The second author acknowledges the support from SERB, Govt. India via MATRIX Grant No. MTR/201S/000309 while revising this manuscript. The first author would like to thank Prof. Karl Kunisch for helpful suggestions. Both authors thank the referee for his/her valuable suggestions.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Regarding the proof of assumption (A2) on existence and uniqueness of solution w to the problem (1.9) with boundary conditions:
where \(\kappa _i=\frac{1}{\nu }(c_i+1+w_d)>0\) for \(i=0\) and 1, and the initial condition (1.12), we apply Bubnov Galerkin method as follows: Set \(A=-\frac{d^2}{dx^2}\) with dense domain D(A) in \(L^2(0,1)\), where
As \(\kappa _0+\kappa _1>0\), A is linear selfadjoint positive definite with a compact inverse, and hence, it has a discrete spectrum with \(0<\lambda _1<\lambda _2<\ldots<\lambda _l<\ldots \) and \(\underset{l\rightarrow \infty }{\lim }\lambda _l=\infty \). The corresponding eigenvectors \(\{\phi _l(x)\}_{l=1}\) forms an orthonormal basis in \(L^2(0,1).\) For \(s\ge 0\), let \({\mathcal {H}}^s\) consist of vector \(\phi \in L^2(0,1)\) such that \(\left\| \phi \right\| _{\mathcal {H}^s}=\Big (\sum _{j=1}^{\infty }\lambda _j^s(\phi ,\phi _j)^2\Big )^{1/2}<\infty \). On \({\mathcal {H}}^s\), we define an innerproduct
When \(s=1\), the norm on \({\mathcal {H}}^1\) can be written as
Since for \(\phi \in {\mathcal {H}}^1\), \(\left\| \phi \right\| ^2\le \lambda _1^{-1}\left\| \phi \right\| ^2_1\), where \(0<\lambda _1<\pi ^2\) is the first eigenvalue of A. Then, \({\mathcal {H}}^1\)-norm is equivalent to the standard \(H^1\)-norm. Let \({\mathcal {H}}^{-s}\) be denoted by the dual space of \({\mathcal {H}}^s\).
Let \(V_m=span\{\phi _1,\ldots ,\phi _m\}\subset {\mathcal {H}}^1(0,1)\). Now seek a Galerkin approximation \(w^m\) to w which is of the form \(w^m(x,t)=\sum _{j=1}^{m}\alpha _{jm}(t)\phi _j(x)\) satisfying
with \(\alpha _{jm}(0)=(w_0,\phi _j)\), \(j=1,2,\ldots ,m\). Since \(V_m\) is finite dimensional, (5) gives rise to a system of nonlinear ODEs. Therefore, an application of the Picard’s existence theorem yields a local existence of a unique solution \(\alpha _{jm}(t)\) and hence, the existence of a unique \(w^m(t)\) for \(t\in [0,t_m^*)\) with \(t_m^*<T\). In order to prove global existence, we need a priori bound to continue the solution to the whole of [0, T). Multiply (5) by \(\alpha _{km}\) and then, sum up to obtain
As in Lemmas 2.1, 2.3 and 2.4, we can easily obtain with \(\alpha =0\) that the sequences \(\{w^m\}\), \(\{w^m_x\}\), \(\{w^m_t\}\) are bounded uniformly in \(L^\infty (0,T;L^2)\). Moreover, the sequences \(\{\mu w^m\}\), \(\{w^m\}\) are also uniformly bounded in \(L^\infty (0,T;\mathcal {H}^1)\) and \(\{E_1(w^m)\}\), \(\{E_2(w^m)\}\), \(\{\mu E_2(w^m)\}\) are bounded uniformly in \(L^\infty (0,1)\). Finally, to obtain uniform boundedness of \(\{w_{xx}^m\}\), we modify the proof in the Lemma 2.2 with \(\alpha =0\) as follows. Multiply (5) by \(\lambda _k\alpha _m\) and then, sum over \(k=1,\ldots ,m\), we obtain after integration by parts with respect to x
and similarly,
Further, use rest of the analysis in the proof of Lemma 2.2 to derive that the sequences \(\{w^m_x\}\), \(\{\mu w^m_{xx}\}\) are uniformly bounded in \(L^\infty (0,T;L^2)\) and \(\{E_2(w^m)(t)\}\) is uniformly bounded in \(L^\infty (0,T;L^2)\). Then, using weak * compactness argument, there exists subsequence, say, \(\{w^{m_n}\}\) of \(\{w^m\}\) such that for \(w^l\subset V_l\subset V_m\) with \(l<m\) and as \(m_n\rightarrow \infty \).
Since \({\mathcal {H}}^1\) is compactly embedded in \(L^2\), there is a subsequence, say again \(\{w^{m_n}\}\) such that \(\{w^{m_n}\}\rightarrow w\) strongly in \(L^2(0,1)\) a.e. \(t\in (0,T)\). Thus
In a similar spirit,
and
Therefore, as \(m_n\rightarrow \infty \) we obtain
for all l. Since the set of finite linear combinations of \(w^l\) is dense in \({\mathcal {H}}^1\), we arrive for any \(v\in {\mathcal {H}}^1\) at
To verify that w satisfies the initial data, let us observe that as \(\{w^{m_n}\}\), \(\{w^{m_n}_t\}\) converging to w, \(w_t\), respectively weak * in \(L^\infty (0,T;L^2)\), then
Let \(\phi \in C^1(0,T)\) with \(\phi (T)=0\) and \(\phi (0)=1\). Now, choose \(v=\phi 'z\) in (8) and \(v=\phi z\) in (9). Then, sum both to obtain \(\underset{m_n\rightarrow \infty }{\lim }( w^{m_n}(0),z)=(w(0),z) \quad \forall z\in L^2\). Therefore \(w(0)=w_0.\) The part of the uniqueness follows from Lemma 2.6.
For the proof of Lemma 2.5 with \(\alpha =0\), we now multiply (5) by \(\lambda _k\alpha '_{km}\) and sum over \(k=1,\ldots ,m\). We derive in similar way the estimate (2.17) and then, the rest of the estimates follows as in the proof of Lemma 2.5 with \(\alpha =0.\) Thus, we obtain the uniform boundedness of the sequence \(\{w^m_{xx}\}\) and then, passing to the limit, we derive the regularity result (1.17).
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Kundu, S., Pani, A.K. Global Stabilization of BBM–Burgers’ Type Equations by Nonlinear Boundary Feedback Control Laws: Theory and Finite Element Error Analysis. J Sci Comput 81, 845–880 (2019). https://doi.org/10.1007/s10915-019-01039-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10915-019-01039-5
Keywords
- Benjamin–Bona–Mahony–Burgers’ equation
- Neumann boundary feedback control
- Stabilization
- Finite element method
- Optimal error estimates
- Numerical experiments