
Abstract
Modeling the seismic response of historical masonry buildings is challenging due to many aleatory and epistemic uncertainties. Additionally, the interaction between structural units further complicates predictions of the seismic behavior of unreinforced masonry aggregates found throughout European city centers. This motivated the experimental campaign on half-scale, double-leaf stone masonry aggregates within the SERA (Seismology and Earthquake Engineering Research Infrastructure Alliance for Europe)—Adjacent Interacting Masonry Structures project. The experimental campaign included a blind prediction competition that provided participants with data on materials, geometry, construction details, and seismic input. After the test, the actual seismic input and all recorded and processed data on accelerations, base-shear, and displacements were shared with participants. Instead of a single analysis for the prediction phase, we performed broader stochastic incremental dynamic analyses to answer whether the common assumptions for aggregate modeling of either fully coupled or completely separated units yield safe predictions of aggregate behavior. We modeled buildings as equivalent frames in OpenSEES using a newly developed macroelement, which captures both in-plane and out-of-plane failure modes. To simulate the interaction between two units, we implemented a new material model and applied it to zero-length elements connecting the units. Our results demonstrate the importance of explicitly modeling the non-linear connection between the units and using probabilistic approaches when evaluating the aggregate response. Although modeling simplifications of the unit interaction and deterministic approaches might produce conservative results in predicted failure peak ground acceleration, we found that these simplified approaches overlook the likely damage and failure modes. Our results further stress the importance of calibrating material parameters with results from equivalent quasi-static cyclic tests and using appropriate damping models.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
This paper covers the prediction and postdiction of the experimental campaign “Adjacent Interacting Masonry Structures” (SERA-AIMS) (Tomić et al. 2022a). The experimental campaign consisted of a shake-table test conducted at the National Laboratory for Civil Engineering (LNEC), Portugal, on two unreinforced stone masonry buildings forming an aggregate. The test was a joint research project between the École Polytechnique Fédérale de Lausanne (EPFL); the University of Pavia; the University of California, Berkeley; and the RWTH Aachen University. The shake-table test was accompanied by a blind prediction competition (Tomić et al. 2022b). This paper more specifically covers the prediction submitted by the EPFL team, which we have extended with a broader stochastic analysis to illustrate the sensitivity of the results concerning the modeling hypotheses of the unit-to-unit interface, and investigates the differences between prediction and experimental results via postdiction analyses.
As an introduction to the presented analyses, we review the literature regarding modeling experimental case studies featuring masonry aggregates, modeling masonry aggregates in general, and existing large-scale assessment procedures. In the following, a unit or a structural unit refers to a single building within an aggregate.
1.1 Modeling masonry aggregates
While there are many papers on modeling free-standing masonry buildings, there is very little on the modeling of masonry aggregates, most likely because of both the large size of the models required for analyzing these aggregates and the scarcity of experimental results available for validating the models. So far, only two models (Senaldi et al. 2019b; Vanin et al. 2020b) were validated against the only large-scale shake table test on a masonry aggregate (Senaldi et al. 2019a; Guerrini et al. 2019). Both were equivalent-frame models, though the first only captured the in-plane failure modes while the second captured both in-plane and out-of-plane failure modes. However, this shake-table test is limited in its applicability to aggregates in European cities that were often built with weak interlocking at the joint or with a dry joint, as the test aggregate connected the two units well through interlocking stones and floor beams. As such, the joint between the two units opened up only marginally during testing; hence the two units could be modeled as fully connected. For European aggregates, though, modeling units as perfectly connected overestimates the interface strength and the stiffness of the whole aggregate.
To study various modeling hypotheses for the interaction between units, several studies compared the predicted performance of a unit within an aggregate (Senaldi et al. 2010; Formisano et al. 2015; Formisano and Massimilla 2018). All studies found that the modeling hypotheses influence the predicted performance of a unit within an aggregate. Furthermore, the studies found that modeling the units as fully separated can result in both conservative or unconservative estimates, depending on the position of each unit in the aggregate and the material and geometrical properties of the neighboring units. However, some differences exist with regard to which units within an aggregate are affected, in which manner, and in which direction. For example, Senaldi et al. (2010) concluded that the impact of aggregate behavior in the transverse direction could be ignored, while Formisano and Massimilla (2018) came to the same conclusion for the longitudinal direction.
Other research aimed to develop procedures for large-scale assessments of masonry aggregates. Formisano et al. (2015) numerically calibrated a procedure derived from the well-known existing vulnerability form of masonry buildings (Benedetti and Petrini 1984; Benedetti et al. 1998). This procedure integrated the following five parameters accounting for the aggregate conditions among adjacent units: the presence of adjacent buildings with different heights, the position of the building in the aggregate, the number of staggered floors, the structural or typological heterogeneity among adjacent structural units, and the different percentages of opening areas among adjacent façades. The procedure was validated and calibrated against pushover analyses of two case study aggregates modeled as fully connected equivalent frames and analyzed using 3MURI. In contrast to the original assessment procedure (Benedetti and Petrini 1984; Benedetti et al. 1998), negative scores allowed units within aggregates to be less vulnerable than free-standing buildings. Overall, it was found that the most vulnerable buildings were sandwiched between shorter buildings or were positioned at either the corner or the end of the aggregate. In some cases, the seismic vulnerability of an aggregate building could be larger than that of a free-standing one. All of this previous research analyzed single units or accounted for the impact of the aggregate through either elastoplastic links (Formisano and Massimilla 2018) or simplified procedures depending on five aggregate and unit properties (Formisano et al. 2015). However, the common link between all these cases is that the reference analyses performed on whole masonry aggregates modeled the aggregate units as perfectly connected.
While these studies give useful and much-needed results on the influence of modeling hypotheses on the predicted response of a unit within an aggregate, they also have certain limitations: (i) Except for Stavroulaki (2019) and Malcata et al. (2020), who modeled the masonry aggregate using a solid FE model, all other studies used equivalent-frame models. Of these, all but the study by Vanin et al. (2020b) could not capture out-of-plane failure modes. (ii) All studies, except Vanin et al. (2020b), modeled the wooden floors as perfectly connected to the walls without the necessary non-linear interface for a slab-to-wall connection. (iii) None of the studies performed dynamic analyses with simultaneous input in the two horizontal directions. (iv) All studies benchmarked the response against aggregates that did not see an opening in the interface between units, either because the benchmark was a numerical model with a perfectly connected interface or because the only test on a masonry aggregate until then did not show significant nonlinearity in the interface between the two units.
1.2 Objectives and structure of this paper
Based on these previous works, we herein focused on modeling the interaction between the two units. In general, our modeling is similar to that of Vanin et al. (2020b), using the macroelement that captures both in-plane and out-of-plane failure modes. While Vanin et al. (2020b) modeled an aggregate where the joint between the units did not play a significant role, we extended their model here by implementing a new nD material model for simulating the behavior of an interface that can be represented by a stiff axial spring with limited tensile strength and a Mohr–Coulomb law in shear, for which the shear force capacity is dependent on the instantaneous axial force. This model is described in Sect. 2, which also describes the case study aggregate, material and modeling properties, and their respective normal and lognormal distributions used for the analyses performed prior to the shake-table campaign (Model 1). In Sect. 3, we use this model to test the sensitivity of the modeling hypotheses concerning the unit-to-unit interface on the predicted aggregate results. Finally, the results of the newly developed interface model are compared to simpler, more common approaches. These are: modeling the units as separated units, as fully connected units, or uncoupling the shear and axial interface behavior.
The second part of the paper deals with the postdiction analyses where this initial model (Model 1) was first subjected to the actual acceleration applied by the shake-table campaign (Sect. 4). Because of the significant difference between predicted and experimental results, two aspects of the model were updated (Model 2 and 3, Sect. 5): the masonry stiffness—using two approaches for obtaining estimates of the stiffness values from shear-compression tests instead of simple compression tests—and the damping model. The paper concludes with findings on modeling unreinforced masonry aggregates using a probabilistic approach and the lessons learned from calibrating numerical models against experimental campaigns.
2 Equivalent-frame model of the SERA-AIMS aggregate
This section describes the geometry of our equivalent-frame model for the SERA-AIMS aggregate (Sect. 2.1), the material model for the zero-length elements implemented in OpenSEES to model the unit-to-unit interface (Sect. 2.2), and the material parameters used for the equivalent-frame model, including their assumed distributions and correlations (Sect. 2.3).
2.1 Geometry of the test unit and the equivalent-frame model
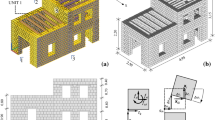
The SERA-AIMS project aggregate comprised the following two units (Tomić et al. 2022a): Unit 1 had a U-shaped footprint with plan dimensions of 2.5 × 2.45 m2 and a total height of 2.2 m. Unit 2 had a closed-square footprint with plan dimensions of 2.5 × 2.5 m2 and a total height of 3.15 m. Unit 2 had additional masses of 1.5 tons evenly distributed per floor. The two units were connected by a layer of mortar without interlocking stones. The wall thicknesses were 30 cm for Unit 1 and 35 and 25 cm for Unit 2 for the first and second floors, respectively. The walls were built from double-leaf irregular stone masonry. The timber floors of the two units were oriented differently, with Unit 1 beams spanning in the x-direction and Unit 2 beams spanning in the y-direction. The thickness of the spandrels underneath the openings was decreased to 15 cm. The geometry of the test units, including the orientation of the coordinate system, is shown in Fig. 1. In the following, the term longitudinal direction is used for the y-direction and transversal direction for the x-direction.

Case study: Floor plan layout and view of the façades of the two units
For the simulations conducted in this study, we have opted to use the equivalent frame model approach. This choice is considered a favorable compromise between the level of detail and computational resources, particularly when a substantial number of analyses need to be performed (Bracchi et al. 2015). Moreover, this modeling approach is extensively utilized in engineering practice, thus enhancing the applicability of our findings. In the equivalent frame model, the facades of buildings are idealized as frames comprising vertical pier elements, horizontal spandrel elements, and rigid nodes. This frame idealization is suitable for buildings with a relatively regular layout of openings, as commonly found in many residential masonry structures (Quagliarini et al. 2017). Within the equivalent frame models, the behavior of individual piers and spandrels is captured through macro-elements that phenomenologically replicate the force–displacement response of these elements. Various macro-element models have been proposed for unreinforced masonry, and a comprehensive review can be found in Quagliarini et al. (2017). The simplicity of this modeling approach enables efficient execution of multiple static and dynamic analyses within a short timeframe. Additionally, by conducting a large number of such analyses, it becomes feasible to address both material and modelling uncertainties. Different modelling approaches used to predict the response of the SERA AIMS aggregate were discussed in detail in Tomić et al. (2022b).
Our equivalent-frame model is shown in Fig. 2. The height of the piers corresponds to the height of the adjacent openings (Bracchi et al. 2015; Quagliarini et al. 2017), and the spandrels were assigned an average thickness so that the area of the rectangular cross-section of the model was equal to the area of the actual cross-section. Nodal panels between piers and spandrels were considered rigid.

Apart from the unit-to-unit interface, for which we implemented a new model (Sect. 2.2), we applied the same modeling principles as Vanin et al. (2020b). We used the macroelement by Vanin et al. (2020a), which builds upon the macroelement by Penna et al. (2014) for the in-plane response and extends the formulation such that one-way out-of-plane bending can also be precisely captured. This approach eliminates the need for separate analyses and provides a framework for analyzing the impact of in-plane and out-of-plane failure modes on collapse capacity. As in Vanin et al. (2020b), the wall-floor and wall-wall connections were modeled using non-linear springs. All elements were implemented in OpenSEES (McKenna et al. 2000).
2.2 Modeling the unit-to-unit interface
Two previous studies on masonry aggregates (Formisano and Massimilla 2018; Stavroulaki 2019) modeled the interface response between adjacent units using link elements, to which 1D linear or non-linear material models were assigned. This was certainly a step forward compared to modeling the units as either isolated or fully connected, but this strategy still ignored the complex non-linear response behavior that can occur at the joint between units. For example, modeling the interface response with 1D links neglects any interaction between the Mode I and Mode II interface displacements. This might not have been very relevant in past studies where the aggregates were always subjected to only uni-directional excitation, but it might become relevant when we apply bi-directional excitation. At the same time, studies applying this approach, such as the ones by Formisano and Massimilla (2018) and Stavroulaki (2019), used the full aggregate models to calibrate the link elements. However, in these models, the units were again perfectly connected, so the complexity of the response of the full model was not addressed.
To model the response of the interface between two units, an nD material model named CohesionFriction3D was implemented into OpenSEES (McKenna et al. 2000). In the direction normal to the interface (x-direction of the interface), a uniaxial material model is assigned. The shear displacement is computed as the resultant from the displacements in the y- and z-direction of the interface, which are the in-plane directions of the interface. The shear force that can be transmitted by the interface is limited by the friction force, which is computed from the instantaneous axial force that acts across the interface, a friction coefficient, and an exponentially degrading cohesion law. It was built upon the work by Lourenco (1996) and Vanin et al. (2017) and extended the latter from a 2D to a 3D problem. In the first step of the iterative material cycle, the axial force acting on the interface is computed based on the uniaxial material model assigned to the axial direction. In the second step, the calculated axial force is used to compute a yield function for the shear stress in the local y–z plane by implementing an iterative return-mapping algorithm. The degradation of the cohesion is modeled through the input of the fracture energy value, and the frictional force is evaluated from the axial force and the friction coefficient. The input parameters for this interface model are, therefore: a uniaxial material model, the cohesion force of the interface (ci), Mode II fracture energy of the interface (Gf,II), and a friction coefficient of the interface (μi). Two simple monotonous examples of the interface model are shown in Fig. 3. These numerical models assume a cohesion of 1 kN, a friction coefficient of µ = 0.4, and a Mode II fracture energy of the interface Gf,II = 15 Nm. The first example (Fig. 3a) shows the application of a constant axial load of 1 kN and a shear displacement in the y-direction. The second example (Fig. 3b) again maintains the constant axial load (1 kN), though the shear displacement is applied in the y–z plane at 45 degrees to the y and z axes. The corresponding cyclic responses for the same parameters and loading directions are shown in Fig. 4. An illustration of the CohesionFriction3D model applied to a unit-to-unit connection is shown in Fig. 5.

CohesionFriction3D monotonic behavior for a shear displacement applied in the y-direction and b shear displacement applied in the y–z plane at 45 degrees to the y and z axes

CohesionFriction3D cyclic behavior with a shear displacement applied in the y-direction and b shear displacement applied in the y–z plane at 45 degrees to the y and z axes

Illustration of the CoihesionFriction3D model for unit-to-unit connections
Many of the input parameters describing the interface response are difficult to estimate. Therefore, when evaluating their impact on the global behavior of the aggregate, it is important to consider uncertainties related to these and other modeling parameters. Reference values for material parameters, including the interface parameters, are described in the following section.
2.3 Material parameters for the equivalent-frame model
All piers and spandrels were assigned the same material properties, meaning that the spatial variability of the material properties was not considered in any of the models. The masonry material parameters were: Em, modulus of elasticity; Gm, shear modulus; fcm, compressive strength; μm, friction coefficient; and cm, the cohesion of masonry. Mean values were chosen according to the experimental campaign performed on masonry of a similar typology by Guerrini et al. (2017, 2019) and Senaldi et al. (2018, 2019a). Standard deviations were chosen based on information reported in the literature or engineering judgment. The mean values and standard deviations that we assumed for these parameters are summarized in Table 1.
The deformable timber floors were modeled as an orthotropic elastic membrane, with a higher stiffness in the main direction of the floor, parallel to the beams, and a lower stiffness in the orthogonal direction. The membrane was therefore defined by the modulus of elasticity in two directions, the shear modulus, and the thickness, and the corresponding values were computed as E1 = 10 GPa and E2 = 0.5 GPa according to Vanin et al. (2020b) and G = 10 MPa according to Brignola et al. (2008, 2012). The factor kfloor multiplies the shear stiffness of the floor. The wall-to-floor connection was modeled with a zero-length element to which a frictional model was assigned. The value of the friction coefficient μf-w was based on the work by Almeida et al. (2020). Sliding was assumed to occur when the beam moved away from the wall in the direction perpendicular to the wall, and pounding was assumed to occur in the opposite direction. It is also possible to model the slip in the direction parallel to the wall (Vanin et al. 2020b), but for this study, the connection in the direction parallel with the wall was assumed as linear elastic, taking the stiffness values from Vanin et al. (2020b).
The connections between orthogonal walls were also modeled using zero-length elements. The connection simulated the potential formation of a vertical crack, which could lead to the out-of-plane failure of a wall. The 1D material for the interface was defined as featuring a damage tension law with exponential softening and a linear elastic model in compression (Vanin et al. 2020b). The material was defined by the elastic modulus, the tensile strength, and the Mode I fracture energy, with parameters taken according to Vanin et al. (2020b). Estimating the material parameters for the wall-to-wall connection is difficult because of the absence of mechanical models. To capture the uncertainty, we introduced the factors fw1 and fw2 as multipliers of the default wall-to-wall connection strength of the first and second unit, respectively. The drift capacities in flexure and shear, δc, flexure and δc, shear, are the limit collapse flexural and shear drifts at which the lateral stiffness of the macroelement is set to zero, chosen according to Vanin et al. (2017). Aggregate interface parameters were defined as: Ei, interface modulus of elasticity; Gi, interface shear modulus; ft,i, tensile strength in the axial direction; Gf,I,i, Mode I fracture energy; ci, interface cohesion force; Gf,II.i, Mode II fracture energy; and μi, interface friction. When applicable, the aggregate interface parameters were directly applied to the interfaces between the units. To calculate the damping coefficients, the Rayleigh damping ratio was applied together with the first six modal periods. Parameters for the material properties other than the masonry material are summarized in Table 2.
Additionally, correlation coefficients were imposed between certain parameters, which are shown in Table 3. A strong correlation was imposed between the modulus of elasticity, shear modulus, and compressive strength, as these values are often correlated in experimental campaigns. A moderate correlation was imposed between wall-to-wall interlocking in the two units, assuming that workmanship regarding details such as interlocking was similar between units of the same aggregate. The other parameters were the same for the two units. Interface parameters regarding the strength and fracture energy for Mode I (normal) and Mode II (transversal) were selected as moderately correlated. Finally, a moderate correlation was imposed between collapse drift values in flexure and shear for masonry elements. It should be noted that the imposed correlation coefficients between the parameters are based on the authors’ judgement and not experimental evidence.
3 Sensitivity of the predicted aggregate response to the modeling hypotheses regarding the unit-to-unit interface
In Sect. 2.2, we introduced a material law for modeling the interface between two units. This nD material law represents the interface with a stiff axial spring with limited tensile strength and a Mohr–Coulomb law in shear, for which the shear force capacity depends on the instantaneous normal force. This modeling hypothesis is more complex than modeling hypotheses adopted in the literature (see Sect. 1.1). Here, we established four different classes of models that differed only in how we modeled the interfaces between Unit 1 and Unit 2; all other modeling choices and assumptions were identical. Case A contained the newly developed nD material model. For Case B, every degree of freedom at the interfaces was modeled by a separate 1D non-linear spring that was linear elastic in compression and with limited strength and exponential softening in tension; in other words, the shear capacity was not dependent on the instantaneous normal force across the interface. Case C featured two units with no interaction. In Case D, the two units were perfectly connected by applying the equivalent degree of freedom (EQDOF) command, which constructs a multi-point constraint between nodes. The four cases are shown in Table 4.
To compare the effect of the modeling hypotheses for the interface, we first compared the modal properties of the four individual cases using mean values for each material parameter. We then performed an incremental dynamic analysis that considered the parameter distributions and correlations, as described in Sect. 2.3.
3.1 Earthquake record
For these incremental dynamic analyses, bi-directional time history analyses were performed using the Montenegro Albatros 1979 record with a peak ground acceleration (PGA) of 0.21 g in the E-W direction and 0.18 g in the N-S direction, shown in Fig. 6 (Luzi et al. 2016). Because none of the four models failed for this PGA level, the acceleration was increased in steps of 50% up to the point of failure.

Processed acceleration time histories of the Montenegro 1979 earthquake recorded at the Albatros station, with the scaled time step in the: a east–west direction; b north–south direction (Luzi et al. 2016). PGA = peak ground acceleration
3.2 Modal analyses
In this section, we compare the modal properties for the mean set of input parameters shown in Table 1. Modal periods for the four cases are shown in Table 5. We observed the same modal shapes and similar modal periods for the model with nD interfaces (Case A), the model with 1D interfaces (Case B), and the model with the fully connected units (Case D). This was expected, as the elastic interface properties of Case A and B are the same. However, as the elastic interface stiffness was very high, the periods were only slightly lower than those in the model with the fully connected units (Case D). The separate units model (Case C) showed lower stiffness and longer periods. Figure 7 shows the first modal shape for all four models. As expected, Case A, B, and D show the same modal shape—transversal (x-direction) deformation of Unit 2—while the separate units model (Case C) shows transversal deformation of Unit 1, which is U-shaped when not restrained by the adjacent unit.

Modal shapes of the first vibration mode of the four models
3.3 Incremental dynamic analysis
3.3.1 Material parameter uncertainty
In addition to the model uncertainty regarding the unit-to-unit joint, we account for uncertainty in the material and modelling parameters through incremental dynamic analyses (IDAs) of sets of models (Vamvatsikos and Cornell 2002; Fragiadakis and Vamvatsikos 2009; Vamvatsikos and Fragiadakis 2009). Several authors have approached the topic of uncertainty in modeling historical masonry buildings (e.g., Dolšek 2009; Rota et al. 2014; Bracchi et al. 2016; Cattari et al. 2018; Franchin et al. 2018; Saloustros et al. 2019). As was done by Dolšek (2009), we use IDA and sample material properties according to Latin hypercube sampling. However, unlike Dolšek (2009), we focus only on material and modelling uncertainty and do not consider aleatory uncertainty related to the ground motion record characteristics, as we only use a single ground motion (Sect. 3.1).
A total of 19 material parameters were chosen to perform the uncertainty analysis. These were:
-
Masonry material parameters (Em, Gm, fcm, μm, cm)
-
Floor stiffness factor (ffloor)
-
Wall-to-wall connection factors (fw1, fw2)
-
Wall-to-floor friction coefficient (μw-f)
-
Drift capacity (δc, flexure, δc, shear)
-
Aggregate interface parameters (Ei, Gi, ft,i, Gf,I,i, ci, Gf,II,i, μi,)
-
Damping (ξ)
The distributions of the material parameters were defined in Sect. 2.3. Latin hypercube sampling was performed to create 400 sets of parameters. The generated matrix thus had dimensions of 19 × 400, where each column contained one set of parameters for a single incremental dynamic analysis. To avoid unrealistic sample sets, correlation matrices were also assigned between the parameters (Table 3); for example, a sample was assigned an upper bound for the modulus of elasticity and a lower bound for the compressive strength. Once all parameters were assigned their values, we calculated the correlation matrix and compared it to the intended matrix. The difference between the two was evaluated by the norm between the intended and the obtained correlation matrix. To minimize the norm of the difference, we performed permutations of random elements within vectors of one material parameter in a method termed simulated annealing (Vořechovský and Novák 2003) that was also applied by Dolsek (2009). After each permutation, the norm was re-evaluated, and if the norm decreased, the iteration was accepted. Otherwise, it was rejected. Sets of material and modeling parameters were then used to perform incremental dynamic analyses.
3.3.2 Results
Results of the IDA are discussed in terms of the differences between the seismic fragility curves for all four modeling approaches (nD non-linear interfaces, 1D interfaces, separate units, and fully connected units) in Fig. 8; all four curves have very similar shapes, wherein the offset of initiation of failure probability depended on the modeling approach. As expected, the separate unit model is the most fragile, having almost double the probability of failure at PGA 0.6 g compared to the nD non-linear interface model. It might seem unexpected that the fully connected units model appeared more fragile than the nD interface model, which would mean that the ability of units to separate can be beneficial even with a possibility of pounding. Instead, it underscores the influence of the interactions between the units on the type of damage and failure as well as its location. For the fully connected units model, we observed an increase in out-of-plane failures in the second story of Unit 2, especially in the x-direction, compared to the nD interface model (Fig. 11). At the same time, failure was localized in Unit 1 in only 3% of the cases. Additionally, in the nD non-linear interfaces model, Unit 1 accounted for 30% of the failures, and a large majority of these failures were in-plane. Assuming that the nD interface model best represents the real behavior, modeling the units as either fully separated or fully connected could be conservative and still overlook probable failure mechanisms.

Comparison of seismic fragility curves for four aggregate modeling approaches
All four modeling approaches showed a correlation between the modulus of elasticity, shear modulus, compressive strength, drift capacities, Rayleigh damping ratio, and floor-to-wall friction with the failure PGA. The values for the linear correlation coefficients were similar for the modulus of elasticity, shear modulus, and compressive strength in all four models. Similarly, the linear correlation coefficients were almost identical for the limit flexure and shear drift values with the failure PGA for all four modeling approaches. The highest linear correlation coefficient was seen in the Rayleigh damping ratio for all modeling approaches except the fully connected units model, which includes floor friction. This underlines the importance of choosing the damping coefficient for non-linear time history analyses of masonry buildings and is in line with findings by Vanin et al. (2020b). Additionally, the nD interface model showed a correlation between the friction coefficient of the interface and the failure PGA. For the 1D interfaces model, the shear stiffness of the interface negatively correlated with the failure PGA, which was confirmed by the positive correlation between the shear stiffness with the seismic demand parameters for both nD and 1D interface models. Interestingly, the collapse capacity in all four modeling approaches was affected more by the friction between the floor and the wall than the effect of the floor stiffness parameter. In fact, the floor stiffness parameter only correlated significantly (P < 5%) with the failure PGA in the 1D interface model. Together with friction at the interface between the two units in the nD interface model, these results highlight the importance of connections when evaluating the collapse capacity. Figure 9 shows the correlations for all four cases. The importance of connections is especially relevant because of the ability of the macroelement to model both the in-plane and out-of-plane failure mode (Fig. 10).

P-test values and correlation coefficients between input parameters and PGA at failure for the four models: a nD interfaces model; b 1D interfaces model; c Separate units model; d Fully connected units model

Examples of out-of-plane and in-plane failure (nD non-linear interfaces model)
When the failure mode was examined in the nD non-linear interfaces model, units were dominated by in-plane failures, as shown in Fig. 11. The separate unit model had 7% out-of-plane failures, which accounted for 56% of the failures for Unit 1. This is considerably more than for the nD interfaces model, where out-of-plane failures occurred in just a few cases (< 1%). This result was not surprising because Unit 1 has a U-shaped layout, which makes it vulnerable to out-of-plane failures if the interaction with Unit 2 is not modeled. However, Unit 1 is also shorter and has slightly thicker walls than Unit 2 with no additional weight, which prevented a drastic increase in out-of-plane failures. For the fully connected units model, only 5% of the failures were out-of-plane, but all of these were localized in the second story of Unit 2 in the x-direction; no out-of-plane failures were located in Unit 1. At the same time, the failure PGA increased in comparison with the separate units model since the collapse of Unit 1 was prevented.


Statistics on the mode of failure (OOP or IP), failed unit (Unit 1 or Unit 2), and failure location: a nD interfaces model; b 1D interfaces model; c separate units model; d fully connected units model
For any modeling approach, in-plane failures dominated, and flexural in-plane failures specifically accounted for 96–97% of the total in-plane failures. For the nD interfaces model, most of the in-plane and out-of-plane failures were localized in the upper story of Unit 2 in the y-direction, a behavior observed in the experiment (Tomić et al. 2022a). The nD interfaces model was also the only one to correctly capture both the in-plane and out-of-plane damage in Unit 1 in the x-direction, also as observed in the experiment (Tomić et al. 2022a). Both the 1D interfaces model and the separate units model predicted a larger number of out-of-plane failures of Unit 1 in the y-direction, though this was especially the case for the latter model. At the same time, modeling the aggregate with fully connected units neglected the most probable failure location in Unit 1, which was the most vulnerable in the transversal direction in the experiment (Tomić et al. 2022a). Our results strongly support the idea that correctly modeling the interface changes the failure location and/or the failure mode.
However, it should be noted that all four classes of models in the prediction underestimated out-of-plane behavior. As further elaborated in the following sections, this was primarily due to overdamping the out-of-plane behavior due to the adoption of Rayleigh initial-stiffness and mass-proportional damping. Figure 11 shows the failure modes and locations, with Table 6 explaining the naming of the failure locations.
To summarize, by comparing models A–D, we draw the following conclusions on the modeling sensitivity of unit-to-unit interfaces in unreinforced masonry aggregates:
-
Modeling hypotheses for the unit-to-unit interface influence the predicted PGA at failure, failure mode, and failure location in an aggregate.
-
Even though modeling units as separate (Case C) was the most conservative approach regarding the PGA at failure when compared to the nD interface model (Case A), there is a danger of incorrectly predicting failure mechanisms because of simplified interface modeling, which can be especially harmful if the goal of the analysis is to design a retrofit intervention.
-
Compared to the experimental results, the nD interface model (Case A) was the only one to correctly capture the localization of the damage in the y-direction in the 2nd story of Unit 2 for both in-plane and out-of-plane failures.
-
The nD interface model (Case A), the 1D interface model (Case B), and the separate units model (Case C) correctly captured the localization of in-plane damage in the x-direction of Unit 1, while modeling units as fully connected (Case D) did not. Hence, if the joint between units is expected to open up, one should avoid modeling the units as fully connected.
-
For the nD interfaces model (Case A), the PGA at failure was correlated with the friction coefficient at the interface, confirming its influence on the behavior of the aggregate, as was also found by Tomić et al. (2022a).
4 Model 1: Prediction model with actual input
The blind prediction required a submission stemming from a single model, with the adopted material properties corresponded to the mean values given in Sect. 2.3. However, the actual accelerations recorded on the shake table differed from the nominal ground motions, as described in Tomić et al. (2022a, b). For this reason, postdiction analyses were performed with the actual accelerations recorded on the shake table, as shown in Table 7.
4.1 Prediction with the actual accelerations recorded at the shake table
The original model that we used to derive the blind prediction entries was based on the mean values of material parameters (Em, Gm, fcm, μm, cm) and the Rayleigh initial-stiffness and mass-proportional damping with 1% critical damping ratio computed according to first and sixth modal period. This original model was re-run with the actual shake-table accelerations recorded during testing. For the blind prediction competition, we requested only deterministic response values. Here we also determine the probabilistic response by creating 20 material parameter sets. We obtained material parameter distributions by pairing the mean values from Sect. 2.3 with the Coefficients of Variation (CoVs) assigned according to Vanin et al. (2017), as shown in Table 8. The displacement quantities compared with the experimental response are shown in Fig. 12; these were the quantities requested in the blind prediction competition.

Compared displacement quantities for the blind prediction submissions. Displacements relative to the ground (Rd1–6) and interface opening (Id1–4)
Figure 13 illustrates the principal damage mechanisms observed during the experimental campaign. Figure 14 shows the maximum recorded flexural drifts with this original model. This and the following group of models all correctly predicted that the shear drifts were small and did not lead to shear cracking; for this reason, they are not displayed here or in the next figures. The results reported in Fig. 15 confirm that the original model is too stiff and thus underestimated the displacements, especially those recorded in Unit 2. Interface openings were satisfactorily predicted in the transversal direction but were underestimated in the longitudinal direction. The predictions of the base shear values were better than the predictions for displacements and interface openings.

Illustrations of principal damage mechanisms observed during the SERA-AIMS experimental campaign (Tomić et al. 2022a)

Maximum recorded flexural drifts for the postdiction analysis with the original model

Comparing the original single prediction model (Model 1) and probabilistic response based on the single prediction model with the experimental results
5 Model 2 and 3: Postdiction analyses
Due to the poor match between the results obtained with the prediction model versus the experimental data (see previous section), it was necessary to reconsider the choice of material properties. Previously, mean values for the probabilistic analysis were taken from vertical and diagonal compression tests performed by Guerrini et al. (2017) and Senaldi et al. (2018) on the masonry of a similar typology (Tomić et al. 2022b), while CoV values were taken from references in the literature.
5.1 Model 2: Re-calibration of material properties based on wallette tests
5.1.1 Updated material properties
Next to the vertical and diagonal compression tests, shear-compression tests were also carried out by Guerrini et al. (2017) and Senaldi et al. (2018). While this data was shared with all participants of the blind prediction competition, we only used it to determine drift capacities. Therefore, to obtain a new set of stiffness values, we simulated the shear compression tests performed by Guerrini et al. (2017) and Senaldi et al. (2018) using the Macroelement3D (Vanin et al. 2020a, b) in OpenSEES. Using Latin hypercube sampling, 200 sets of material parameters were created, and the results were compared with the experimental ones in terms of: (i) secant stiffness between 0 and 70% of maximum shear force, (ii) maximum shear force, (iii) residual force, and (iv) displacement at 20% force drop. In Table 9, the best parameter sets for each wallette were chosen. It is to be noted that for the flexure-dominated wallette, shear parameters are bolded out and not accounted for. The same was done for the flexural parameters for the shear-dominated wallette.
Based on these findings, we defined new mean values for the masonry material parameters paired with CoV values taken from Vanin et al. (2017) (Table 10). From this, we generated 20 sets of material parameters to run postdiction analyses.
5.1.2 Model 2 with initial stiffness proportional damping
Postdiction analyses were run using the 20 generated material and modeling parameter sets and classical Rayleigh initial-stiffness and mass-proportional damping with a 1% critical damping ratio. To account for uncertainties, the results were plotted as median, 16th, and 84th percentile and were compared to experimental values in Fig. 16. Even with an improvement over the prediction using the actual acceleration record, the response in this new model was still too stiff, and the displacements were severely underestimated. This was attributed to overdamping the out-of-plane behavior with the present damping model, which was updated in the following section.

Comparing the stochastic response of 20 postdiction models updated with material parameters calibrated according to shear-compression tests (Model 2) and 1% initial stiffness and mass-proportional damping
5.1.3 Model 2 with secant stiffness proportional damping
To improve Model 2, the analyses were re-run using the same 20 generated material parameter sets along with a novel secant stiffness proportional damping model (Vanin and Beyer 2023) and a 5% critical damping ratio computed for the first and sixth modes. To account for uncertainties, we plotted the median and 16th/84th percentile curves. The stochastic response shown in Fig. 17 was satisfactory and improved on the analysis that used Rayleigh initial-stiffness and mass-proportional damping parameters. While the base shear in the x-direction was overestimated, interface openings and upper-story displacements were more accurately predicted than via the model with initial-stiffness damping (Fig. 16) by at least correctly capturing the order of magnitude, especially at the 84th percentile.

Comparing the stochastic response of 20 postdiction models updated with material parameters calibrated according to shear-compression tests (Model 2) and 5% secant stiffness proportional damping
Overall, the postdiction Model 2 that used secant stiffness proportional damping and material parameters calibrated against shear-compression tests produced significantly better estimates of the displacement demands and dominant damage mechanisms observed during testing. Conversely, all models featuring classical Rayleigh initial-stiffness and mass-proportional damping and material parameters from vertical compression tests underestimated the displacements and failed to reproduce the damage mechanism. In addition, these previously used models often predicted damage in the lower story of Unit 2 instead of in the upper story where the soft-story mechanism occurred in the experiment.
5.2 Model 3: Updating material properties considering the axial load ratio
While the predictions obtained with Model 2 were much better than those obtained with Model 1, the mean values of the displacement demands predicted by Model 2 were still significantly smaller than the experimental results. We thus hypothesize that this error could be due to the difference in axial load ratios (ALRs) imposed on the walls in the shake-table test versus those applied in the shear-compression tests, from which we back-calculated the E-modulus. Because the literature suggests that the lateral stiffness of a wall is proportional to the applied ALR (see Sect. 5.2.1), we herein investigated the ALR. Table 11 shows ALRs at mid-heights of the walls within the shake-table unit, assuming a stone masonry density of ρ = 2000 [kg/m3] and a masonry compressive strength of fc = 1.30 [MPa] (Table 1). The ALRs were computed at the mid-height of each story, as shown in Table 11.
5.2.1 Dependency of E on ALR in the literature
Vanin et al. (2017) analyzed 123 shear-compression tests documented in the literature and reported a linear trend between effective stiffness and axial load, normalized to compressive strength fc. They thus proposed an equation for the effective stiffness as a function of compressive strength and ALR:
For masonry topology A as per Vanin et al. (2017), \({\left(\frac{E}{{f}_{c}}\right)}_{ref}\)= 400 and represents the modulus of elasticity to compressive strength ratio characteristic for each masonry typology. Taken together with \({f}_{c}\) = 1.30 MPa and the mean axial load ratio \({\sigma }_{0}/{f}_{c}\) = 0.031 (Table 11), we obtain \({E}_{eff}\)= 56.5 MPa and \(E\)= 113 MPa, where \(E\) is an initial uncracked stiffness, and \({E}_{eff}\) is an effective or cracked stiffness equal to 50% of the initial stiffness, according to CEN (2005). It should be noted that the author states that this formula is limited when the ratio of applied to axial loads is close to zero, which is the case for SERA-AIMS. Reference values of the ratio refer to an ALR of around 30%. Comparing masonry topologies in Fig. 18, we can see that this is unrelated to the typology, as when ALR < 0.05, \(\frac{{E}_{eff}}{{f}_{c}}\le 100\), pointing to \({E}_{eff}\le\) 130 MPa for \({f}_{c}=1.3\) MPa.

Relationship between effective stiffness and axial load, normalized to the compressive strength fc (Vanin et al. 2017)
5.2.2 Estimating the E-modulus from shear-compression tests accounting for the ALR
Table 12 shows the shear-compression tests (Guerrini et al. 2017; Senaldi et al. 2018) used to estimate the E-modulus accounting for ALR. It shows that the average ALRs applied in the shear-compression tests were around 10 times higher than those in the walls of the shake-table test unit (Table 11).
Figure 19 shows the E-moduli derived from the four shear-compression tests. For Model 2, these four values were averaged to obtain the mean E-modulus. For the updated Model 3, we assumed that the E-modulus is linearly proportional to the ALR (EALR = 6256.8 × ALR). As we cannot capture the ALR dependency in the equivalent-frame model, we need to compute a fixed value for a representative ALR. We choose here the mean ALR from Table 11. As such, when fc = 1.3 MPa and ALR = 0.031, we obtain E ≈ 200 MPa. Based on these findings, in Table 13, we define new mean values for the E-modulus and the G-modulus (G = 0.4E). Finally, Table 14 compares E values for the three models.

A first-degree polynomial fit of a relationship between ALR and modulus of elasticity
5.2.3 Postdiction results with updated material properties considering ALR and secant stiffness proportional damping
The stochastic response of Model 3 with 5% secant stiffness proportional damping improved upon that of Model 2 with the same damping properties (Fig. 20). Here, a very good match was attained, especially when observing the 84th percentile in comparison to the experimental results. This shows that the model is not too sensitive to a relatively low value of the modulus of elasticity but also that the hypotheses found in the literature on the linear correlation between effective modulus of elasticity and ALR seem reasonable. This merits further investigation in future research.

Comparing the stochastic response of 20 postdiction models updated with material parameters calibrated according to shear-compression tests and 5% secant stiffness proportional damping, with E = f(ALR) (Model 3)
6 Conclusion
The modeling of unreinforced masonry aggregates is commonly simplified by considering the aggregate units as either perfectly connected or isolated. However, even if a simplified approach results in a satisfying or conservative value, there is a risk of overlooking possible damage and collapse mechanisms, and a lack of experimental data has stalled most progress in this area. To address this gap, this paper examines the prediction and postdiction of a shake-table test on a half-scale stone masonry aggregate tested by incremental bidirectional excitation. The discrepancies between the predicted and experimental results were used to detect which material and modeling parameters hindered the simulation. To demonstrate the lessons learned from these mistakes, we then updated the model for the postdiction analysis.
To better represent the interaction between aggregate units, an n-dimensional non-linear material model for the interface was implemented in OpenSEES. The methodology was applied to a case study of a masonry aggregate, which was modeled by using equivalent-frame models and four common modeling approaches for the connection between the two units: (1) new nD non-linear interfaces, (2) 1D non-linear interfaces, (3) no connection for separate units, and (4) perfectly connected units. To consider the material and modelling uncertainties, we used Latin hypercube sampling to create 400 sets of 19 material and modeling parameters, distributed according to normal and lognormal distributions. Then for each model and each set of parameters, incremental dynamic analyses were performed in OpenSEES until the aggregate failed or collapsed using a macroelement that can capture in-plane and out-of-plane responses.
The analyses showed that the initial assumptions about the approach to modeling the interface between units could lead to different predictions of seismic fragility, which may be conservative in terms of the failure PGA compared to the most detailed representation through an nD interfaces model (Case A). This means that with a simplified modeling approach for masonry aggregates, such as modeling fully separate or connected units, may not adequately predict the damage location (between units and within units) and the failure mode. Therefore, simplified modeling of masonry aggregates can produce only seemingly satisfactory or conservative results, but missing key damage and failure mechanisms.
Due to the discrepancies in the nominal and applied accelerations, it was difficult to directly compare the prediction model with experimental results. Therefore, the comparison was performed by re-running the initial prediction model with the applied accelerations. The predicted results poorly matched the experimental ones for the previously selected material parameters and damping model. To address this, we first re-calibrated the material parameters according to quasi-static shear-compression tests instead of vertical and diagonal compression tests–leading to improved results. However, here again the discrepancies between numerical and experimental results were too large to be ignored. So we next applied a novel secant damping model, which allowed the models to successfully capture the out-of-plane behavior. This showed that this damping model is essential for avoiding overdamping the out-of-plane behavior and incorrectly estimating the damage mechanism, something that was common for all four model classes in the prediction. At the same time, this model finally corrected the order of magnitude of displacements, especially when accounting for the 84th percentile. These conclusions highlight the need for adopting a probabilistic approach instead of the deterministic one when modeling historical masonry aggregates due to the effects of many material and modeling parameters. The results also support an assumption that material parameters should be calibrated according to shear-compression tests, if available, rather than simply taking the values from vertical and diagonal compression tests. Finally, we investigated the discrepancy in the ALR between shear-compression tests and actual half-scale shake-table tests. We found that assuming a linear correlation between the modulus of elasticity and the ALR based on the findings in the literature, we observed an even better comparison of experimental and numerical results. This finding justifies further investigation of the modulus of elasticity and the ALR in the future.
Data availability
The OpenSEES models used for producing the results presented in this paper as well as the sets of material and modeling parameters used for the IDAs, are shared openly through the repository: https://doi.org/10.5281/zenodo.7391977.
References
Almeida JP, Beyer K, Brunner R, Wenk T (2020) Characterization of mortar-timber and timber-timber cyclic friction in timber floor connections of masonry building. Mater Struct 53:51. https://doi.org/10.1617/s11527-020-01483-y
Benedetti D, Petrini V (1984) On the seismic vulnerability of masonry buildings: an evaluation method (in Italian). L’industria Delle Costr 149:66–74
Bracchi S, Rota M, Penna A, Magenes G (2015) Consideration of modelling uncertainties in the seismic assessment of masonry buildings by equivalent-frame approach. Bull Earthq Eng 13:3423–3448. https://doi.org/10.1007/s10518-015-9760-z
Bracchi S, Rota M, Magenes G, Penna A (2016) Seismic assessment of masonry buildings accounting for limited knowledge on materials by Bayesian updating. Bull Earthq Eng 14:2273–2297
Brignola A, Frumento S, Lagomarsino S, Podestà S (2008) Identification of shear parameters of masonry panels through the in-situ diagonal compression test. Int J Architect Heritage 3:52–73. https://doi.org/10.1080/15583050802138634
Brignola A, Pampanin S, Podestà S (2012) Experimental evaluation of the in-plane stiffness of timber diaphragms. Earthq Spectra 28:1687–1709. https://doi.org/10.1193/1.4000088
Cattari S, Camilletti D, Lagomarsino S et al (2018) Masonry Italian code-conforming buildings. Part 2: nonlinear modelling and time-history analysis. J Earthquake Eng 22:2010–2040
Dolsek M (2009) Incremental dynamic analysis with consideration of modeling uncertainties. Earthq Eng Struct Dyn 38:805–825. https://doi.org/10.1002/eqe.869
Formisano A, Florio G, Landolfo R, Mazzolani FM (2015) Numerical calibration of an easy method for seismic behaviour assessment on large scale of masonry building aggregates. Adv Eng Softw 80:116–138. https://doi.org/10.1016/j.advengsoft.2014.09.013
Formisano A, Massimilla A (2018) A Novel procedure for simplified non-linear numerical modeling of structural units in masonry aggregates. Int J Architect Heritage 12:1162–1170. https://doi.org/10.1080/15583058.2018.1503365
Fragiadakis M, Vamvatsikos D (2009) Fast performance uncertainty estimation via pushover and approximate IDA. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.965
Franchin P, Ragni L, Rota M, Zona A (2018) Modelling uncertainties of Italian code-conforming structures for the purpose of seismic response analysis. J Earthq Eng 22:1964–1989
Guerrini G, Senaldi I, Scherini S et al (2017) Material characterization for the shaking-table test of the scaled prototype of a stone masonry building aggregate. Pistoia, Italy
Guerrini G, Senaldi I, Graziotti F et al (2019) Shake-table test of a strengthened stone masonry building aggregate with flexible diaphragms. Int J Architect Heritage. https://doi.org/10.1080/15583058.2019.1635661
Lourenco PB (1996) Computational strategies for masonry structures. Ph.D. thesis. Delft University, The Netherlands
Luzi L, Puglia R, Russo E (2016) Engineering Strong Motion Database, version 1.0. Istituto Nazionale di Geofisica e Vulcanologia, Observatories & Research Facilities for European Seismology. https://doi.org/10.13127/ESM.Orfeus.WG5
Malcata M, Ponte M, Tiberti S et al (2020) Failure analysis of a Portuguese cultural heritage masterpiece: bonet building in Sintra. Eng Fail Anal 115:104636
McKenna F, Fenves GL, Scott MH, Jeremic B (2000) Open System for Earthquake Engineering Simulation (OpenSees). University of California, Berkeley, http://opensees.berkeley.edu.
Penna A, Lagomarsino S, Galasco A (2014) A non-linear macroelement model for the seismic analysis of masonry buildings. Earthq Eng Struct Dyn 43:159–179. https://doi.org/10.1002/eqe.2335
Quagliarini E, Maracchini G, Clementi F (2017) Uses and limits of the Equivalent Frame Model on existing unreinforced masonry buildings for assessing their seismic risk: a review. J Build Eng 10:166–182. https://doi.org/10.1016/j.jobe.2017.03.004
Rota M, Penna A, Magenes G (2014) A framework for the seismic assessment of existing masonry buildings accounting for different sources of uncertainty. Earthq Eng Struct Dyn 43:1045–1066. https://doi.org/10.1002/eqe.2386
Saloustros S, Pelà L, Contrafatto FR, Roca P (2019) Analytical derivation of seismic fragility curves for historical masonry structures based on stochastic analysis of uncertain material parameters. Int J Architect Heritage 13(7):1142–1164
Senaldi I, Magenes G, Penna A (2010) Numerical investigations on the seismic response of masonry building aggregates. AMR 133–134:715–720. https://doi.org/10.4028/www.scientific.net/AMR.133-134.715
Senaldi I, Guerrini G, Scherini S et al (2018) Natural stone masonry characterization for the shaking-table test of a scaled building specimen. In: 10th international masonry conference, pp 9–11
Senaldi IE, Guerrini G, Comini P et al (2019a) Experimental seismic performance of a half-scale stone masonry building aggregate. Bull Earthq Eng. https://doi.org/10.1007/s10518-019-00631-2
Senaldi I, Guerrini G, Solenghi M et al (2019b) Numerical modelling of the seismic response of a half-scale stone masonry aggregate prototype. Numerical modelling of the seismic response of a half-scale stone masonry aggregate prototype, pp 127–135
Standardization EC for (2005) EN 1996-1-1 (2005), Eurocode 6: Design of masonry structures—Part 1–1: general rules for reinforced and unreinforced masonry structures
Stavroulaki ME (2019) Dynamic behavior of aggregated buildings with different floor systems and their finite element modeling. Front Built Environ 5:138. https://doi.org/10.3389/fbuil.2019.00138
Tomić I, Penna, A, DeJong, M, Butenweg C, Correia AA, Candeias PX, Senaldi I, Guerrini G, Malomo D, Beyer K (2022a) Shake table testing of a half-scale stone masonry building. Submitted to Bull Earthq Eng
Tomić I, Penna, A, DeJong, M, Butenweg C, Correia AA, Candeias PX, Senaldi I, Guerrini G, Malomo D, Beyer K et al (2022b) Shake-table testing of a stone masonry building aggregate: Overview of blind prediction study. Submitted to Bull Earthq Eng
Vamvatsikos D, Cornell CA (2002) Incremental dynamic analysis. Earthq Eng Struct Dyn 31:491–514. https://doi.org/10.1002/eqe.141
Vamvatsikos D, Fragiadakis M (2009) Incremental dynamic analysis for estimating seismic performance sensitivity and uncertainty. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.935
Vanin F, Zaganelli D, Penna A, Beyer K (2017) Estimates for the stiffness, strength and drift capacity of stone masonry walls based on 123 quasi-static cyclic tests reported in the literature. Bull Earthq Eng 15:5435–5479. https://doi.org/10.1007/s10518-017-0188-5
Vanin F, Penna A, Beyer K (2020a) A three-dimensional macroelement for modelling the in-plane and out-of-plane response of masonry walls. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.3277
Vanin F, Penna A, Beyer K (2020b) Equivalent-frame modeling of two shaking table tests of masonry buildings accounting for their out-of-plane response. Front Built Environ 6:42. https://doi.org/10.3389/fbuil.2020.00042
Vanin F, Beyer K (2023) Equivalent damping ratio for a macroelement modelling the out-of-plane response of masonry walls. In preparation.
Vořechovský M, Novák D (2003) Statistical correlation in stratified sampling. In: Proceedings of 9th international conference on applications of statistics and probability in civil engineering–ICASP. Citeseer, pp 119–124
Acknowledgements
The authors would like to thank the project partners whose experience and advices contributed to the quality of the work: Prof Andrea Penna, Prof Gabriele Guerrini, Dr. Ilaria Senaldi, Prof Matthew DeJong, Prof Daniele Malomo, Prof Christoph Butenweg, Dr. Marko Marinović, Prof Antonio Correia, and Prof Paulo Candeais. The authors would like to especially thank the technicians of the LNEC laboratory in Lisbon whose dedicated work allowed the project to run smoothly and across all the obstacles: Artur Santos, Susana Almeida, Aurélio Bernardo, and Anabela Martins. Furthermore, we thank the master students whose efforts advanced the project: Cecilia Noto and Samuel Cosme. Finally, we want to stress the contribution of post-doctoral researcher Filipe Luis Ribeiro to the successful outcome of this project.
Funding
Open access funding provided by EPFL Lausanne. The project leading to this paper has received funding from the European Union’s Horizon 2020 research and innovation programme under Grant Agreement No 730900 of The Seismology and Earthquake Engineering Research Infrastructure Alliance for Europe (SERA), under the name SERA - Adjacent Interacting Masonry Structures (AIMS). The first author of this project was partially funded through the project grant 200021_175903/1 “Equivalent frame models for the in-plane and out-of-plane response of unreinforced masonry buildings” supported by the Swiss National Science Foundation.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The authors have not disclosed any competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Tomić, I., Beyer, K. Shake-table test on a historical masonry aggregate: prediction and postdiction using an equivalent-frame model. Bull Earthquake Eng (2023). https://doi.org/10.1007/s10518-023-01765-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10518-023-01765-0