
Abstract
We study the impact of an accurate computation and incorporation of coloured noise in radar altimeter data when computing a regional quasi-geoid model using least-squares techniques. Our test area comprises the Southern North Sea including the Netherlands, Belgium, and parts of France, Germany, and the UK. We perform the study by modelling the disturbing potential with spherical radial base functions. To that end, we use the traditional remove-compute-restore procedure with a recent GRACE/GOCE static gravity field model. Apart from radar altimeter data, we use terrestrial, airborne, and shipboard gravity data. Radar altimeter sea surface heights are corrected for the instantaneous dynamic topography and used in the form of along-track quasi-geoid height differences. Noise in these data are estimated using repeat-track and post-fit residual analysis techniques and then modelled as an auto regressive moving average process. Quasi-geoid models are computed with and without taking the modelled coloured noise into account. The difference between them is used as a measure of the impact of coloured noise in radar altimeter along-track quasi-geoid height differences on the estimated quasi-geoid model. The impact strongly depends on the availability of shipboard gravity data. If no such data are available, the impact may attain values exceeding 10 centimetres in particular areas. In case shipboard gravity data are used, the impact is reduced, though it still attains values of several centimetres. We use geometric quasi-geoid heights from GPS/levelling data at height markers as control data to analyse the quality of the quasi-geoid models. The quasi-geoid model computed using a model of the coloured noise in radar altimeter along-track quasi-geoid height differences shows in some areas a significant improvement over a model that assumes white noise in these data. However, the interpretation in other areas remains a challenge due to the limited quality of the control data.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Radar altimeter data in the form of along-track (quasi-) geoid slopes (i.e., deflections of the vertical) or along-track (quasi-) geoid height differences play an important role in regional (quasi-) geoid modelling (Hwang et al. 1997; Hwang and Hsub 2008; Sandwell and Smith 2005, 2009; Smith 2010; Slobbe 2013; Slobbe and Klees 2014; Slobbe et al. 2014). Using radar altimeter measurements in one of these forms is mainly motivated by the fact that they are less contaminated by long-wavelength errors of different origins; see Chelton et al. (2001) and Sandwell and Smith (2009) for an overview of various error sources. However, these data are polluted by coloured noise, which is primarily due to data differentiation. Though there are numerous approaches of how differential radar altimeter measurements are used in quasi-geoid modelling, a common nominator is that noise in along-track (quasi-) geoid slopes or (quasi-) geoid height differences is assumed to be white, sometimes after a low-pass filtering has been applied. This applies also when radar altimeter data are used in (quasi-) geoid modelling in the form of gravity anomalies, because such a transformation requires differencing data into along-track deflections of the vertical (e.g., Hwang et al. 1998; Andersen et al. 2010). A proper modelling of noise in differential radar altimeter data is, however, important, particularly when data of different sources are combined when computing (quasi-) geoid models. Statistical approaches, such as least-squares techniques and least-squares collocation, allow, in principle, any noise model to be incorporated. In this study, we use the least-squares technique to estimate quasi-geoid models. Olesen et al. (2002) have investigated the impact of accounting for coloured noise in airborne gravity measurements on quasi-geoid models and concluded that the impact is insignificant at the one-centimetre target accuracy. A study on an impact of coloured noise in radar altimeter along-track (quasi-) geoid slopes or (quasi-) geoid height differences on (quasi-) geoid models has not been published yet.
Sandwell and Smith (2009) have shown that noise in radar altimeter point-wise sea surface measurements is almost white. This implies that noise in along-track slopes or along-track sea surface height differences increases proportionally with frequency due to differentiation. In a more recent study, Slobbe (2013) and Slobbe and Klees (2014) applied a repeat-track analysis method to exact repeat mission radar altimeter data over the North Sea and found that noise in along-track sea surface height slopes is indeed coloured. However, coloured noise in radar altimeter measurements has not been accounted for yet when computing regional quasi-geoid models, e.g., those computed by Slobbe and Klees (2014). There may have been two reasons for that. First, it is due to a presumption that miss-modelling of high-frequency noise has a reduced impact on the estimated quasi-geoid model. Moreover, high-frequency noise in radar altimeter differential data is often dealt with by applying a low-pass filter (e.g., Sandwell and Smith 2005, 2009), which may facilitate the assumption of white noise over the pass band. Second, it is computationally quite intensive to account for coloured noise in radar altimeter differential data when estimating quasi-geoid models seen the huge amount of radar altimeter data available today. However, accounting for coloured noise in these data may improve the accuracy of quasi-geoid models, making numerous new applications possible. For instance, quasi-geoid models with one centimetre accuracy or perhaps even better may pave the way to reconsider the realization of vertical datums using the expensive levelling networks. For most coastal areas, altimeter data are indispensable, and the question rises whether or not better noise models for radar altimeter along-track (quasi-) geoid slopes or along-track (quasi-) geoid height differences are required to achieve this.
The main research question to be addressed in this manuscript is about the impact of accounting for coloured noise in radar altimeter along-track quasi-geoid height differences on a regional quasi-geoid model. We consider two scenarios: (1) radar altimeter measurements comprise the only data available offshore, and (2) shipboard gravity data are additionally available. To that end, we reduce instantaneous radar altimeter along-track sea surface height differences to along-track quasi-geoid height differences using a hydrodynamic model. Then, we estimate the noise in along-track quasi-geoid height differences using a repeat-track analysis technique for exact repeat mission (ERM) radar altimeter data and a post-fit residual analysis technique for geodetic mission (GM) radar altimeter data. For each radar altimeter mission phase, we estimate the noise power spectral density (PSD) and fit to it an auto regressive moving average (ARMA) model. This ARMA model is then used to filter the functional model for radar altimeter along-track quasi-geoid height differences (e.g., Schuh 1996). Subsequently, we estimate a regional quasi-geoid model with weighted least-squares using the radar altimeter-derived data together with terrestrial and airborne gravity data, and depending on the scenario, also with shipboard gravity data. We compare this quasi-geoid model with a model estimated using the same data, however, assuming white noise in radar altimeter along-track quasi-geoid height differences after a suitable low-pass filter is applied. Since the estimation of ARMA noise models per radar altimeter mission phase is time-consuming, we also address a question whether or not the same ARMA model, except for the variance, can be used for all radar altimeter mission phases.
We also make an attempt to answer the question whether or not the quality of a quasi-geoid model improves when coloured noise in radar altimeter along-track quasi-geoid height differences is accounted for. This test is performed for two control data sets, namely, (1) the European Gravimetric Geoid 2015, EGG2015 (Denker 2013, 2015) assuming that no shipboard gravity data are available when computing the quasi-geoid, and (2) GPS/levelling data at height markers for the Dutch and Belgium mainlands.
The outline of the manuscript is the following. We begin with a summary of the procedure used in this study to estimate quasi-geoid models (Sect. 2). Next, we describe in Sect. 3 our approach to estimate noise in along-track quasi-geoid height differences from radar altimeter data. The question about the impact of accounting for coloured noise in these data on quasi-geoid models is the subject of Sect. 4. Here, we also present the results of a comparison with EGG2015 and independent GPS/levelling data. Finally, in Sect. 5, we conclude by emphasizing the main findings and identifying topics for future research.
2 Regional quasi-geoid modelling
We perform our study in the Southern North Sea (Fig. 1). It includes the Netherlands and Belgium as well as parts of France, Germany, and the UK.

Test area and data: terrestrial gravity data (red), airborne gravity data (blue), shipboard gravity data (green), and radar altimetry data (cyan)
In this section, we summarize the key steps of the quasi-geoid modelling approach used in this study, i.e., (1) the chosen parameterization of the regional quasi-geoid (Sect. 2.1), (2) the available data sets and the data pre-processing (Sect. 2.2), and (3) the data weighting (Sect. 2.3).
2.1 Parameterization
We use the remove-compute-restore procedure. The long-wavelength signal content in the data is reduced by removing the contribution of the GOCO05S global gravity model complete to degree 280 (Pail et al. 2010; Mayer-Gürr et al. 2015). At the very short wavelengths, residual terrain modelling (RTM) is applied (e.g., Forsberg 1984). The residual disturbing potential is parameterized over the data area (Fig. 1) using Poisson wavelets of order 3 (Holschneider and Iglewska-Nowak 2007). They belong to the class of spherical radial base functions (SRBFs), which have become popular in regional gravity field modelling (e.g., Schmidt et al. 2007; Klees et al. 2007, 2008; Eicker 2008; Tenzer and Klees 2008; Wittwer 2009; Panet et al. 2011; Slobbe 2013). The horizontal positions of the SRBFs are located on a Fibonacci point distribution (e.g., González 2010), one of several homogeneous point distributions on the sphere. This choice is motivated by Wittwer (2009), who investigated the performance of different point distributions in the context of quasi-geoid modelling using SRBFs. Suitable values for the density and the depth of the SRBFs at sea and land are found following the procedure in Slobbe (2013). We find an optimal distance between the SRBFs of 10 km at sea and 4 km on land, which gives a total number of 18,706 SRBF coefficients to be estimated. The optimal depth of the SRBFs is found to be 40 km at sea and 25 km on land below the RTM surface (see Sect. 2.2). According to Tenzer et al. (2012), this provides more accurate quasi-geoid models than locating the SRBFs on a Bjerhammar sphere or at a surface of constant ellipsoidal heights. The set of SRBF coefficients are complemented with bias parameters for terrestrial, shipboard, and airborne gravity data (see Sect. 2.2). In this way, existing inconsistencies among various gravity data sets may be accounted for, which, for instance, may be caused by height datum offsets.
2.2 Data and data pre-processing
Apart from radar altimetry data, we use terrestrial gravity anomalies (147,540 data points), airborne gravity disturbances (7594 data points), and, depending on the scenario, shipboard gravity anomalies (66,236 data points). Figure 1 shows the spatial distribution of the used gravity data sets. The data are reduced by the contribution of GOCO05S complete to degree 280 to decrease the signal correlation length. Moreover, RTM (Forsberg 1984) is used to smooth the data and limit the number of SRBFs in mountainous regions. The RTM corrections are computed using the method of Heck and Seitz (2007) and Grombein et al. (2013). In doing so, bathymetry is ignored to reduce the numerical complexity. The bathymetry contribution to the RTM corrections is rather negligible. This is in view of the fact that over the area of interest water depths are relatively small (the average depth is about 90 m), slopes are negligible, and prominent underwater features are absent. Finally, biases in shipboard gravity anomalies are reduced using a cross-over adjustment, whose details are documented in Slobbe and Klees (2014).
Radar altimeter sea surface heights are corrected for the instantaneous dynamic topography (IDT), which may improve the quality of the quasi-geoid model significantly as shown in Slobbe and Klees (2014). The IDT correction includes three components: (1) ocean tides, (2) surge (which is due to wind- and pressure-driven sea level variations), and (3) baroclinic effects (which are due to salinity- and temperature-driven sea level variations). To account for the former two components, whose contributions are by far the largest, we use the Dutch Continental Shelf Model, version 6, DCSMv6 (Zijl et al. 2013). To account for the third component, we use differences between the DTU10 mean sea surface model (Andersen and Knudsen 2009; Andersen 2010) and the European Gravimetric Geoid 2008, EGG2008 (Denker et al. 2009). Radar altimeter along-track sea surface heights corrected for the IDT may suffer from long wavelength systematic errors, due to, e.g., orbit inaccuracies. Therefore, we do not use them directly as quasi-geoid heights when estimating quasi-geoid models. Instead, we form differences between two successive measurements and interpret them as along-track quasi-geoid height differences. These differences compose the “altimeter data set” when estimating quasi-geoid models using least-squares in Sect. 4. This data set comprises 1-Hz data from multiple ERM and GM phases: CryoSat-2, Envisat (phases C and B), ERS-1 (phases A–G), ERS-2, Geosat (phase D), GFO-1, Jason-1 (phases A–C), Jason-2, Poseidon, and Topex (phases A, B, and N). It is worth noting that data in the vicinity of the coast are absent (see Fig. 1), since no data re-tracking has been performed there (Scharroo 2012). In case of ERM data, along-track quasi-geoid height differences obtained over multiple cycles of the same passes are stacked together and averaged. Therefore, they have smaller a priori noise variances compared to GM altimeter data. Furthermore, data from mission phases that share the same orbit are combined and averaged over multiple cycles. This applies to (1) Topex (phase A), Poseidon, Jason-1 (phase A), and Jason-2; (2) ERS-1 (phases C and G), ERS-2, Envisat (phase B), and Saral Altika; and (3) ERS-1 (phases B and D). They are referred to as “TopexA+Poseidon+Jason1A+Jason2”, “ERS1CG+ERS2+EnvisatB+SA”, and “ERS1BD”, respectively. They are treated as single mission phases in our manuscript. The number of radar altimeter along-track quasi-geoid height differences per mission phase is provided in Table 1.
In this study, we prefer using radar altimeter data in the form of along-track quasi-geoid height differences and not in the form of gravity anomalies, as is often done in quasi-geoid modelling. The conversion of radar altimeter sea surface heights into gravity anomalies comprises many data processing steps, including filtering, interpolation (i.e., gridding), and integration. At the end, the noise in the computed gravity anomalies is correlated, and the associated noise covariance matrix is full. As the along-track sampling of the radar altimeter is lost during the data conversion into gravity anomalies, the full noise covariance matrix cannot be estimated in the same, relatively simple manner as done in this study, but must be computed using the law of error propagation. Seen the amount of radar altimeter-derived gravity anomalies and the complexity of the conversion into gravity anomalies, it is numerically challenging to do this noise propagation. This may explain why so far no attempts have been made to estimate such a covariance matrix. Using along-track quasi-geoid height differences as data set in combination with a parametric noise model (i.e., ARMA model) and the filtering of the functional model (e.g., Schuh 1996) does not suffer from these drawbacks.
2.3 Data weighting
The SRBF coefficients and bias parameters for the sets of gravity anomalies and disturbances are estimated using weighted least-squares without regularization. In doing so, noise in terrestrial and shipboard gravity anomalies and airborne gravity disturbances is assumed to be white. For the terrestrial and shipboard gravity anomalies, this may be a reasonable assumption. Regarding the airborne gravity disturbances, this choice is motivated by the fact that these data are low-pass filtered and the noise characteristic over the pass band is almost flat. Furthermore, accounting for coloured noise in these data may have a negligible influence on the estimated quasi-geoid model as concluded in (Olesen et al. 2002). To properly scale the different data sets when estimating the unknown parameters, we use Monte-Carlo variance component estimation (MCVCE); see Koch and Kusche (2002) and Kusche (2003) for details. For each gravity data set, a variance factor is estimated. Regarding the altimeter-derived data set, one variance factor is estimated per mission phase. To account for coloured noise in these data, we use the frequency-depending data weighting scheme of Ditmar et al. (2007), which was originally developed in the context of global gravity field modelling using satellite gravity data. The scheme is implemented per radar altimeter track in the form of filter operations applied to the data and the columns of the design matrix as described by Klees et al. (2003). An advantage of this approach is that it can easily deal with data gaps, which are quite common in radar altimeter tracks. In this way, we also avoid setting up the full noise covariance matrix (Schuh 1996).
3 Noise estimation and modelling
The optimal method to obtain a noise covariance matrix of radar altimeter derived along-track quasi-geoid height differences is a complete error budgeting comprising noise in along-track sea surface heights and the instantaneous dynamic topography, and the effect of along-track differentiation. There are many studies known that are related to errors in radar altimeter sea surface heights (e.g., Sandwell and Smith 2009; Chelton et al. 2001) and the references therein. A description of the spatial-temporal noise characteristics of hydrodynamic models, in particular shallow-water hydrodynamic models as used in this study, is still in its infancy. Some preliminary results are discussed in Holt et al. (2005) and Zijl et al. (2013). Here, we suggest a more simplistic approach for noise estimation, which is described below. This approach provides an approximate noise covariance matrix for radar altimeter along-track quasi-geoid height differences. We expect that this noise covariance matrix performs better than the white noise assumption, among others, due to the fact that along-track differentiation is accounted for. Some weaknesses of this approach are discussed below.
To estimate noise in ERM along-track quasi-geoid height differences, we follow a repeat-track analysis technique proposed in Slobbe (2013) and Slobbe and Klees (2014). This procedure applies to wide-sense stationary Gaussian noise. For each pass of a particular ERM phase, we obtain multiple noise realizations by differencing data belonging to different cycles. When assuming J cycles, we can compute \(\frac{1}{2} \times J \times ({J - 1})\) noise realizations. Per noise realization, we compute the PSD, and average over all PSDs to obtain one PSD per pass. The final noise PSD per ERM phase is then obtained by taking the mean over all passes belonging to the mission phase. In doing so, we exclude a limited number of passes due to being too short to allow for a reliable estimation of the PSD. As an example, Fig. 2 shows the \(\sqrt{\hbox {PSD}}\) of noise in along-track quasi-geoid height differences for individual passes of Jason-1 phase B, the mean over all passes, and an estimate of the scatter around the mean.

Noise in Jason-1 phase B radar altimeter along-track quasi-geoid height differences: (1) \(\sqrt{\hbox {PSD}}\)s of noise for various passes (cyan); (2) the square-root of the average noise PSD, i.e., the final noise \(\sqrt{\hbox {PSD}}\) (blue); (3) the standard deviation of the final noise \(\sqrt{\hbox {PSD}}\) (green); and (4) \(\sqrt{\hbox {PSD}}\) of the best-fitting ARMA model (red). About 12 % of passes are absent due to being too short for a reliable PSD computation
The figure illustrates that for Jason-1 phase B the noise in along-track quasi-geoid height differences changes over all frequencies from 1100 km down to 10 km wavelength. Two regimes can be distinguished. A rather moderate increase with frequency down to wavelengths of about 50 km, which is followed by a much stronger increase with frequency for wavelengths shorter than 50 km. For each phase, an ARMA model is fit to the final noise PSD using the method of Klees and Broersen (2002), Klees et al. (2003) and Klees and Ditmar (2004). The red curve in Fig. 2 shows the \(\sqrt{\hbox {PSD}}\) of the best-fitting ARMA model for Jason-1 phase B. The fit is tight, within uncertainties, and captures all relevant features.
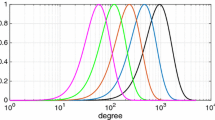
The same approach is applied to data from all the other ERM phases: “ERS1BD”, “ERS1CG+ERS2+EnvisatB+SA”, “TopexA+Poseidon+Jason1A+Jason2”, ERS-1 (phase A), GFO-1, and Topex (phase B). The \(\sqrt{\hbox {PSD}}\)s of the along-track quasi-geoid height differences are shown in Fig. 3. They exhibit the same features as already discussed for Jason-1 phase B.

Square-root noise PSDs in radar altimeter along-track quasi-geoid height differences of the ERM and GM phases listed in Table 1
A repeat-track analysis is not applicable to GM phases. However, for those missions, which have both ERM and GM phases, we use the noise PSD obtained for the ERM phase also for the GM phase up to a scale factor (i.e., the total power), which is later estimated using MCVCE. This applies to ERS-1 (phases E and F), Envisat (phase C), Jason-1 (phase C), and Topex (phase N) GM phases. For CryoSat-2 and Geosat (phase D), we cannot rely upon ERM data. To obtain an estimate of noise in data from these mission phases, we apply a post-fit residual analysis technique. That is, we start assuming white noise in along-track quasi-geoid height differences of these two mission phases. We compute a quasi-geoid model using all available data sets including the available noise covariance matrices. The least-squares residuals for the Cryosat-2 and Geosat phase D data are then taken as a realization of the noise in these measurements. The corresponding noise PSDs and ARMA models are then computed per mission phase in the same way as in case of ERM data. Next, we repeat the quasi-geoid computation, now using the latest noise models. The iteration has to go on until the differences between two successive quasi-geoid models are below the expected accuracy of the quasi-geoid model. In our case, we found that a second iteration is not necessary. It is worth noting that a similar iterative scheme was successfully applied by Farahani (2013) and Farahani et al. (2013, (2014) to deal with coloured noise in GRACE inter-satellite accelerations and GOCE gravity gradients in the context of global gravity field modelling. Figure 3 also shows the final \(\sqrt{\hbox {PSD}}\)s of noise for CryoSat-2 and Geosat phase D GM data. They share the same features as the noise PSDs already shown for the other mission phases.
Estimating measurement noise using the post-fit residual analysis technique is a critical step as, for instance, errors in the functional model may be miss-interpreted as measurement noise. To obtain an indication that the applied procedure indeed provides a useful estimation of the noise PSDs for the Cryosat-2 and Geosat phase D data, we perform the following experiment. For GM phase E of ERS-1, we estimate the noise PSD using the post-fit residual technique. The result is compared with the noise PSD already obtained for the ERM phase A of ERS-1. Figure 4 shows the result of this comparison.

\(\sqrt{\text{ PSD }}\) of noise in ERS-1 radar altimeter along-track quasi-geoid height differences. The repeat-track and post-fit residual analysis techniques are used for a realization of noise for ERM phase A and GM phase F, respectively
Overall, the two noise PSDs show the same behaviour and exhibit the same strong increase for wavelengths shorter than 50 km. There are some minor discrepancies in the range of medium wavelengths between 150 and 50 km, and at the very long wavelengths above 300 km. However, it turns out that the impact of these discrepancies on the quasi-geoid are within uncertainty. In this sense, the post-fit residual analysis technique provides a sufficiently accurate estimate of the noise in data from the CryoSat-2 and Geosat phase D mission phases.
Finally, we find it worth noting that, in reality, the noise characteristics of a mission phase may be different for different regions. Here, we did not attempt to refine the noise PSDs correspondingly for two reasons. First, estimating PSDs for sub-regions reduces the performance of the PSD estimator due to the reduced number of data and the shorter passes. Secondly, the least-squares estimator is quite robust against small errors in noise stochastic models.
4 Impact of accounting for coloured noise
To quantify the impact of accounting for coloured noise in radar altimeter along-track quasi-geoid height differences on quasi-geoid models, a number of experiments are performed. Basically, we compare quasi-geoid models computed with and without using the full noise covariance matrix of the altimeter-derived data set in the least-squares estimation process. In the latter case, we follow the current practice and low-pass filter (22 km cut-off wavelength) radar altimeter along-track quasi-geoid height differences to remove strong noise at the short wavelengths (e.g., Sandwell and Smith 2005, 2009; Slobbe and Klees 2014; Slobbe et al. 2014). In doing so, we use EGG2008 to synthesize and extend data for each mission phase at both ends of a pass prior to the low-pass filtering. This substantially reduces errors when initializing the filter.
Two scenarios are considered when accounting for coloured noise in the altimeter-derived data set. First, we use the ARMA noise models, which are derived for each mission phase as described in the previous section (see Sect. 4.1). Second, we use only one ARMA noise model for all radar altimeter mission phases under consideration (see Sect. 4.2). In both cases, proper variance factors are estimated for each mission phase using MCVCE. Differences between the quasi-geoid models computed in this way allow conclusions to be drawn whether or not a single ARMA model may be sufficient at the benefit of a reduced complexity of the data processing. We begin our analysis in the absence of shipboard gravity data. This allows the study of the impact in an extreme case in which radar altimeter measurements comprise the only data set available offshore. Thereafter, we quantify the impact on quasi-geoid models when shipboard gravity data are added to the data base. In the Southern North Sea, the shipboard gravity data are collected with high accuracy and good spatial coverage, whereas the quality of the radar altimeter measurements is degraded in the coastal waters of the Southern North Sea (Andersen and Knudsen 2000; Deng et al. 2002). Hence, this scenario may be seen as another extreme case in which the impact of the altimeter-derived data set is expected to be limited as is the impact of accounting for coloured noise in these data. It is worth noting that when we perform our analysis in the absence of shipboard gravity data, we still incorporate these data in the Markermeer and IJsselmeer lakes as well as in the Wadden sea as these areas are void of any radar altimeter data (Fig. 1).
4.1 Using individual coloured noise models
4.1.1 Excluding shipboard gravity data
Figure 5 shows the difference between two quasi-geoid models. One is computed using the coloured noise models per altimeter mission phase, whereas the other one is computed without using them, but applying a low-pass filter.

Impact of accounting for coloured noise in radar altimeter along-track quasi-geoid height differences on the quasi-geoid model. Minimum, maximum, mean, standard deviation (SD) and RMS (root mean square) values are −8.6, 10.5, 0.1, 2.2, and 2.3 cm, respectively. The coloured noise in case of each mission phase is accounted for using the corresponding ARMA noise model. No shipboard gravity data are used
The RMS of the differences is 2.3 cm with extreme values of −8.6 and 10.5 cm. The mean difference between the two solutions is negligible. The impact is the largest along the coast of France, Belgium, the Netherlands, and Germany. The dominant pattern has long-wavelength features. This is to be expected from the noise PSDs, presented in Fig. 3. Compared to a white noise model of the same variance, the derived coloured noise model gives higher weights to long wavelengths and lower weights to short wavelengths. It is remarkable that the effect of ignoring coloured noise in the least-squares estimation introduces strong gradients in the quasi-geoid of 6 cm per 100 km in North-West to South-East direction in the coastal areas of the Netherlands and Belgium. We also notice significant differences between the land quasi-geoids over parts of the Netherlands and Belgium with amplitudes of up to 3 cm. This can be explained by a fundamental property of gravitational fields, which may undergo changes everywhere if data are changed locally. Here, this feature provides an opportunity to validate the computed quasi-geoid models against GPS/levelling control data over the Netherlands and Belgium. Finally, we notice a relatively pronounced anomaly in the North Sea off the coast of northern France, which appears as a dark red blob in the map of impact. The reason for this anomaly is a lack of data in the vicinity of a SRBF (cf. Fig. 1). Due to this lack of data, the corresponding SRBF coefficient is not well constrained, causing this local artifact.
Figure 6 shows the differences between the computed quasi-geoid models and GPS/levelling data at 624 and 2735 height markers in the Netherlands and Belgium, respectively. Table 2 shows the corresponding statistics.

Differences between gravimetric and geometric quasi-geoid heights at height markers in the Netherlands (top) and Belgium (bottom). The gravimetric quasi-geoid models are computed without (left) and with (right) accounting for coloured noise in radar altimeter along-track quasi-geoid height differences. The latter refers to using different ARMA noise models for each mission phase. No shipboard gravity data are used when computing the gravimetric quasi-geoid models
For the Netherlands, we notice a reduction of the bias between gravimetric and geometric quasi-geoid heights at the GPS/levelling points from 2.1 to 0.1 cm when coloured noise in the altimeter-derived data set is taken into account. For Belgium, the bias, however, increases from −0.5 to −3.5 cm. For the standard deviations between gravimetric and geometric height anomalies, the situation in both countries is opposite: an increase from 1.4 to 1.8 cm for the Netherlands and a decrease from 3.0 to 2.7 cm for Belgium. The standard deviation of the geometric quasi-geoid heights at the GPS/levelling data is known to be not better than 2 cm. Therefore, based on a comparison with independent quasi-geoid heights at the GPS/levelling points, we cannot decide whether or not the quality of the quasi-geoid (in terms of the standard deviation) has improved when coloured noise in the altimeter-derived data set is accounted for.
We also compare the computed quasi-geoid models with EGG2015 at the available GPS/levelling stations. The corresponding differences are shown in Fig. 7, and their statistics are provided in Table 3.

Differences between the computed quasi-geoid models and EGG2015 at the GPS/levelling points in the Netherlands (top) and Belgium (bottom). The quasi-geoid models are computed without (left) and with (right) accounting for coloured noise in radar altimeter along-track quasi-geoid height differences. The latter refers to using different ARMA noise models for each mission phase. No shipboard gravity data are used when computing the quasi-geoid models
We notice a much better fit of our quasi-geoid model with EGG2015 when accounting for coloured noise in the altimeter-derived data set. This is particularly visible in Belgium, where the RMS of the differences to EGG2015 reduces significantly from 3.1 to 0.8 cm. The standard deviations are nearly the same. The RMS reduction indicates a significant improvement of the quality of our quasi-geoid model when accounting for coloured noise. This statement is justified because EGG2015 uses shipboard gravity data, whereas no shipboard gravity data have been used here when computing our quasi-geoid models. Hence, EGG2015 is expected to be more accurate and, therefore, may serve as a reference. Over the Netherlands, we also observe a reduction of the RMS difference to EGG2015 from 4.0 to 3.0 cm, whereas the standard deviation of the differences increases from 1.2 to 2.3 cm. This increase, however, is still within the uncertainty of EGG2015, i.e., statistically not significant.
Practically, the differences between the quasi-geoid models computed with and without accounting for coloured noise in the altimeter-derived data set could also be entirely or partly be caused by a different weighting of the sets of terrestrial gravity anomalies or airborne gravity disturbances, because MCVCE is used in all computations. However, Table 4 shows that this is not the case here.
The variance factors and a posteriori noise variances computed for these data sets are statistically identical no matter whether the coloured noise in the radar altimeter-derived data is accounted for or not. Thus, the relative weighting of the non-radar altimetry data sets is the same in all experiments no matter whether coloured noise in the altimeter-derived data set has been accounted for or not.
4.1.2 Including shipboard gravity data
When including shipboard gravity data in the least-squares adjustment, we expect that the contribution of the altimeter-derived data set to the quasi-geoid model is reduced. This is simply due to the fact that shipboard gravity data, in particular, if carefully collected and pre-processed, is widely known to be more accurate than radar altimeter data. Therefore, we expect that the impact of accounting for coloured noise in radar altimeter along-track quasi-geoid height differences is lower when shipboard gravity data are added as opposed to when these data are excluded. To study this, we repeat the experiment of Sect. 4.1.1, now including the shipboard gravity data.
Figure 8 shows the spatial pattern of the differences between quasi-geoid models estimated with and without accounting for coloured noise in the altimeter-derived data set.

Impact of accounting for coloured noise in radar altimeter along-track quasi-geoid height differences on the quasi-geoid model. Its Min, Max, Mean, SD, and RMS are −7.3, 6.2, 0.0, 0.9, and 0.9 cm, respectively. The coloured noise in case of each mission phase is accounted for using the corresponding ARMA noise model. The shipboard gravity data are used
All statistics of the differences are smaller compared to the experiment without shipboard gravity data (cf. Fig. 5). For instance, the RMS difference reduces from 2.2 to 0.9 cm and the extreme differences now range from −7.3 to 6.2 cm compared to −8.6 and 10.5 cm when no shipboard gravity data are used. Furthermore, the spatial pattern of the differences has changed significantly with many short wavelength features at the sea, where the impact is maximum. A closer analysis reveals that these features are highly correlated with areas of poor coverage with shipboard gravity data (cf. Figs. 8, 9).

The distribution of the shipboard gravity data. Areas of poor coverage are marked with red and green boxes
Examples of such anomalies are marked with dashed boxes in Figs. 8 and 9. An extreme example is indicated by a dashed green box in both figures. There, the spatial pattern of differences matches the shipboard gravity tracks in that area.
The facts that (1) the impact is reduced as compared to the experiment where no shipboard gravity data are used; (2) the spatial pattern of the impact at sea is now heavily influenced by the distribution of the shipboard gravity data; and (3) the largest differences occur in areas of poor spatial coverage with shipboard gravity data all indicate that the altimeter-derived data set is down-weighted when shipboard gravity data are included. This is in line with findings in earlier studies (e.g., Slobbe and Klees 2014). It can easily be verified by studying the a posteriori noise standard deviations of the shipboard gravity data set and the altimeter-derived data set. We find that the a posteriori noise standard deviation of the shipboard gravity data is 1.1 mGal, no matter whether coloured noise in the altimeter-derived data set is accounted for or not. The a posteriori noise standard deviations of the altimeter-derived data are provided in Table 5 per mission phase with and without accounting for coloured noise when estimating the quasi-geoid.
The analysis of Table 5 additionally confirms that along-track quasi-geoid height differences derived form the ERM phases are more accurate than those associated with the GM ones. This is an expected outcome given the fact that the former ones are averaged over many cycles; see Table 1 for the number of cycles over which ERM data are averaged.
Similarly to the experiment without shipboard gravity data, the results are not affected by a change of the relative weighting between the non-radar altimeter data sets. This is clear from Table 6, in which the estimated variance factors and a posteriori noise variances are provided for the non-radar altimeter data sets.
Figure 8 also reveals some long wavelength features over land, particularly in Belgium. However, the amplitudes are rather small, hardly reaching 1 cm. This is below the standard deviation of the geometric quasi-geoid heights at height markers. Therefore, results of a comparison of gravimetric and geometric quasi-geoid heights are not presented. Assessing whether in this case the quasi-geoid improves or not requires much better control data (with a standard deviation of a few millimeters), which are nowadays unavailable. Figure 10 shows the differences between EGG2015 and the quasi-geoid models obtained without and with accounting for the coloured noise in the altimeter-derived data set. The statistics of the differences are provided in Table 7.

Differences between the computed quasi-geoid models and EGG2015 at the GPS/levelling points in the Netherlands (top) and Belgium (bottom). The quasi-geoid models are computed without (left) and with (right) accounting for coloured noise in radar altimeter along-track quasi-geoid height differences. The latter refers to using different ARMA noise models for each mission phase. Shipboard gravity data are used when computing the quasi-geoid models
The corresponding RMS values for the Netherlands are comparable. In Belgium, the RMS difference is reduced from 2.4 to 1.5 cm when coloured noise is accounted for. However, the reduction is within the uncertainty of EGG2015, which does not allow to draw further conclusions about which quasi-geoid model is to be preferred.
Finally, an analysis of the differences between gravimetric and geometric height anomalies at the height markers across the Netherlands and Belgium reveals the presence of long wavelength errors in both the EGG2015 model and the regional quasi-geoid model computed in this study, which uses all data sets and a proper modelling of coloured noise in the altimeter-derived data set. Figure 11 shows the differences between gravimetric and geometric height anomalies at height markers in the Netherlands and Belgium after removal of the mean difference per country. The corresponding statistics are provided in Table 8.
The spatial pattern of the differences cannot be attributed to systematic errors in the geometric height anomalies, but are long wavelength errors in the two gravimetric quasi-geoid models. To understand this, one should remember that the levelling networks and the GPS networks in both countries are set up, observed, and adjusted independently. If they had been responsible for the long wavelength differences between gravimetric and geometric height anomalies, the pattern would have been discontinuous across the political border. Figure 11, however, shows a smooth transition across the political border, which can only be caused by long wavelength errors in the gravimetric quasi-geoid models. A possible explanation for these long-wavelength gravimetric quasi-geoid model errors are systematic inaccuracies in the terrestrial gravity anomaly data sets, which are not properly dealt with in the remove-compute-restore procedure.
4.2 Using a single ARMA model
So far, we have used for each particular radar altimeter mission phase a different ARMA noise model following the procedure of Sect. 3. Estimating noise PSDs and fitting ARMA models are numerically intensive operations. Looking at the noise PSDs found in Sect. 3, we notice that the shapes of the noise PSDs do not differ significantly. Therefore, we find it relevant to inspect whether or not a single ARMA noise model (up to the total power, which is always estimated using MCVCE) can be used when computing a quasi-geoid model for the region of interest. To address this question, we use the ARMA noise model of “TopexA+Poseidon+Jason1A+Jason2” for all radar altimeter mission phases under consideration. We compare the quasi-geoid model based on this single ARMA model with the one that uses different ARMA models per radar altimeter mission phase. Figure 12 shows a spatial rendition of the differences between the two quasi-geoid models. The differences are plotted for models excluding and including shipboard gravity data.

Differences between gravimetric and geometric height anomalies at height markers in the Netherlands and Belgium. The left refers to the gravimetric quasi-geoid computed in this study based on all data sets and coloured noise in the altimeter-derived data set being accounted for, whereas the right refers to EGG2015. For each country, the mean difference is removed
The differences obtained in both cases are minor with peak values barely reaching one centimetre, which is below the noise level of the quasi-geoid models.
Furthermore, in line with earlier findings, we notice that (1) the differences are larger when no shipboard gravity data are used, which can be seen when comparing Fig. 12a with Fig. 12b; (2) the differences computed in the absence of shipboard gravity data (Fig. 12a) show short- and long-wavelength patterns; and (3) the differences computed when shipboard gravity data are included are the largest in areas with no or sparse shipboard gravity data, which can be seen when comparing Fig. 12b with Fig. 9.
5 Summary and conclusions
We studied the impact and added value of a proper handling of coloured noise in radar altimeter along-track quasi-geoid height differences on a regional quasi-geoid model. Using radar altimeter data in this form has a number of advantages compared to non-differenced data. The corresponding functional model is simple, interpolation or filtering at the pre-processing stage is not needed, and data gaps do not require a special attention.

Spatial rendition of the differences between two quasi-geoid models. One uses a single ARMA noise model for all radar altimeter mission phases, whereas the other uses individual ARMA noise models per mission phase. a shows the differences when shipboard gravity data are excluded, whereas b when these data are included. The statistics (min, max, mean , SD, and RMS) are a −1.6, 1.1, 0.0, 0.3, and 0.2 cm; and b −0.8, 0.8, 0.0, 0.2, and 0.2 cm
We confirmed earlier findings of Slobbe (2013) and Slobbe and Klees (2014) that ERM radar altimeter along-track quasi-geoid height differences suffer from coloured noise, and showed in addition that the same applies to GM phase data. The noise PSD increases with frequency. It has a moderate slope for wavelengths longer than 50 km, and a significantly steeper slope for shorter wavelengths. Combined with terrestrial, airborne, and shipboard gravity data, we computed regional quasi-geoid models in the Southern North Sea without and with taking the coloured noise in radar altimeter along-track quasi-geoid height differences into account. The difference between these models was used as a measure of the impact of accounting for the coloured noise in these data. The main findings of the study are the following:
-
(i)
The impact on the estimated quasi-geoid model may attain peak values of more than a decimetre if shipboard gravity data are not available. Peak values are still above a few centimetres if shipboard gravity data are included.
-
(ii)
The impact is not confined to offshore regions, but visible over the whole area considered in this study. It is most pronounced along the coast, but has also long-wavelength features of a few hundred kilometres over the land.
-
(iii)
A comparison with independent GPS/levelling data reveals some improvements (e.g., about 28 % in terms of RMS differences in the Netherlands) when a full noise covariance matrix is used. However, for some areas noise in the GPS/levelling control data does not allow for a decision in favour of one or the other quasi-geoid model.
-
(iv)
A much better fit of our quasi-geoid model computed without shipboard data with EGG2015 over Belgium indicates the benefit of accounting for coloured noise in the altimeter-derived data set. However, the results of such a comparison for the Netherlands are found to be less conclusive.
Additionally, it was confirmed that shipboard gravity measurements relative to altimeter-derived data get higher weights in quasi-geoid modelling. Furthermore, an expected higher accuracy of data from the exact repeat radar altimeter mission phases as compared to those from the geodetic mission phases was confirmed.
The study allows us to conclude that when aiming at a few-centimetre quasi-geoid model, a full noise covariance matrix for hydrodynamically corrected along-track sea surface height differences should be used if these data comprise the primary offshore data. If in addition to this dataset, shipboard gravity data are available, we still advise to use a full noise covariance matrix, though the impact mainly depends on the quality and spatial coverage of shipboard gravity data, and on the target accuracy of the quasi-geoid model.
Finally, a by-product of our analysis revealed that regional quasi-geoid models compiled in this study as well as EGG2015 still suffer from notable long-wavelength errors over Belgium and the Netherlands. Those inaccuracies are comparable in terms of pattern and size for models produced in our study and EGG2015. A possible explanation for these inaccuracies is the presence of significant systematic errors in the terrestrial gravity data. Further attempts are needed to either remove these systematic errors or to adopt the stochastic model of noise for terrestrial gravity data.
References
Andersen OB, Knudsen P (2000) The role of satellite altimetry in gravity field modelling in coastal areas. Phys Chem Earth 25:17–24. doi:10.1016/S1464-1895(00)00004-1
Andersen OB, Knudsen P (2009) DNSC08 mean sea surface and mean dynamic topography models. J Geophys Res 114:C11001. doi:10.1029/2008JC005179
Andersen OB (2010) The DTU10 gravity field and mean sea surface. In: Second international symposium of the gravity field of the Earth (IGFS2), September 20–22, 2010, Fairbanks
Andersen OB, Knudsen P, Berry PAM (2010) The DNSC08GRA global marine gravity field from double retracked satellite altimetry. J Geod 84:191–199. doi:10.1007/s00190-009-0355-9
Chelton DB, Ries JC, Haines BJ, Fu L-L, Callahan PS (2001) Satellite altimetry and earth sciences—a handbook of techniques and applications. In: Fu L-L, Cazenave A (eds) International geophysics, vol 69, pp 1–131. doi:10.1016/S0074-6142(01)80146-7
Denker H, Barriot J-P, Barzaghi R, Fairhead D, Forsberg R, Ihde J, Kenyeres A, Marti U, Sarrailh M, Tziavos IN (2009) The development of the European gravimetric geoid model EGG07. In: Sideris MG (ed) Observing our changing earth, International Association of Geodesy Symposia, vol 133, pp 177–185. doi:10.1007/978-3-540-85426-5_21
Denker H (2013) Regional gravity field modeling: theory and practical results. In: Xu G (ed) Sciences of geodesy II, pp 185–291. doi:10.1007/978-3-642-28000-9_5
Denker H (2015) A new European gravimetric (quasi)geoid EGG2015. In: 26th IUGG General Assembly, June 22–July 2, Prague
Deng X, Featherstone WE, Hwang C, Berry PAM (2002) Estimation of contamination of ERS-2 and Poseidon satellite radar altimetry close to the Coasts of Australia. Mar Geod 25:249–271. doi:10.1080/01490410214990
Ditmar P, Klees R, Liu X (2007) Frequency-dependent data weighting in global gravity field modeling from satellite data contaminated by non-stationary noise. J Geod 81:81–96. doi:10.1007/s00190-006-0074-4
Eicker A (2008) Gravity field refinement by radial basis functions from in-situ satellite data, Ph.D. Thesis. University of Bonn, Bonn
Farahani HH (2013) Modelling the Earth’s static and time-varying gravity field using a combination of GRACE and GOCE data, Ph.D. Thesis. Delft University of Technology, Delft
Farahani HH, Ditmar P, Klees R, Liu X, Zhao Q, Guo J (2013) The static gravity field model DGM-1S from GRACE and GOCE data: computation, validation and an analysis of GOCE mission’s added value. J Geod 87:843–867. doi:10.1007/s00190-013-0650-3
Farahani HH, Ditmar P, Klees R (2014) Assessment of the added value of data from the GOCE satellite mission to time-varying gravity field modeling. J Geod 88:157–178. doi:10.1007/s00190-013-0674-8
Forsberg R (1984) A study of terrain reductions, density anomalies and geophysical inversion methods in gravity field modeling, Technical Report No. 5, Ohio State University, Columbus
González A (2010) Measurement of areas on a sphere using Fibonacci and latitude–longitude lattices. Math Geosci 42:49–64. doi:10.1007/s11004-009-9257-x
Grombein T, Seitz K, Heck B (2013) Optimized formulas for the gravitational field of a tesseroid. J Geod 87:645–660. doi:10.1007/s00190-013-0636-1
Heck B, Seitz K (2007) A comparison of the tesseroid, prism and point-mass approaches for mass reductions in gravity field modelling. J Geod 81:121–136. doi:10.1007/s00190-006-0094-0
Holschneider M, Iglewska-Nowak I (2007) Poisson wavelets on the sphere. J Fourier Anal Appl 13:405–419
Holt JT, Allen JI, Proctor R, Gilbert F (2005) Error quantification of a high-resolution coupled hydrodynamic ecosystem coastal ocean model: Part 1 model overview and assessment of the hydrodynamics. J Mar Syst 57:167–188. doi:10.1016/j.jmarsys.2005.04.008
Hwang C (1997) Analysis of some systematic errors affecting altimeter-derived sea surface gradient with application to geoid determination over Taiwan. J Geod 71:113–130. doi:10.1007/s001900050080
Hwang C, Kao E-C, Parsons B (1998) Global derivation of marine gravity anomalies from Seasat, Geosat, ERS-1 and Topex/Poseidon altimeter data. Geophys J Int 134:449–459. doi:10.1111/j.1365-246X.1998.tb07139.x
Hwang C, Hsub H-Y (2008) Shallow-water gravity anomalies from satellite altimetry: case studies in the east china sea and Taiwan strait. J Chin Inst Eng 31:841–851. doi:10.1080/02533839.2008.9671437
Klees R, Broersen P (2002) How to handle colored noise in large least-squares problems—building the optimal filter. Delft University Press, DUP Science, Delft
Klees R, Ditmar P, Broersen P (2003) How to handle colored observation noise in large least-squares problems. J Geod 76:629–640. doi:10.1007/s00190-002-0291-4
Klees R, Ditmar P (2004) How to handle colored noise in large least-squares problems in the presence of data gaps? In: Sansò F (ed) V Hotine-Marussi symposium on mathematical geodesy. International Association of Geodesy Symposia, vol 127, pp 39–48. doi:10.1007/978-3-662-10735-5_6
Klees R, Prutkin I, Tenzer R, Wittwer T (2007) Development of a technique for combining parameters of the Earth’s gravity field for quasi-geoid determination on the territory of the Federal Republic of Germany and Europe. Delft University Press, DUP Science, Delft
Klees R, Tenzer R, Prutkin I, Wittwer T (2008) A data-driven approach to local gravity field modelling using spherical radial basis functions. J Geod 82:457–471. doi:10.1007/s00190-007-0196-3
Koch K-R, Kusche J (2002) Regularization of geopotential determination from satellite data by variance components. J Geod 76:259–268. doi:10.1007/s00190-002-0245-x
Kusche J (2003) A Monte-Carlo technique for weight estimation in satellite geodesy. J Geod 76:641–652. doi:10.1007/s00190-002-0302-5
Mayer-Gürr T, Pail R, Gruber T, Fecher T, Rexer M, Schuh W-D, Kusche J, Brockmann J-M, Rieser D, Zehentner N, Kvas A, Klinger B, Baur O, Höck E, Krauss S, Jäggi A (2015) The combined satellite gravity field model GOCO05S. Geophys Res Abs 17:EGU2015-12364
Olesen AV, Andersen OB, Tscherning CC (2002) Merging of airborne gravity and gravity derived from satellite altimetry: test cases along the coast of Greenland. Stud Geophys Geod 46:387–394. doi:10.1023/A:1019577232253
Pail R, Goiginger H, Schuh W-D, Höck E, Brockmann JM, Fecher T, Gruber T, Mayer-Gürr T, Kusche J, Jäggi A, Rieser D (2010) Combined satellite gravity field model GOCO01S derived from GOCE and GRACE. Geophys Res Lett 37:L20314. doi:10.1029/2010GL044906
Panet I, Kuroishi Y, Holschneider M (2011) Wavelet modelling of the gravity field by domain decomposition methods: an example over Japan. Geophys J Int 184:203–219. doi:10.1111/j.1365-246X.2010.04840.x
Sandwell DT, Smith WHF (1997) Marine gravity anomaly from Geosat and ERS-1 satellite altimetry. J Geophys Res 102:10039–10054. doi:10.1029/96JB03223
Sandwell DT, Smith WHF (2005) Retracking ERS-1 altimeter waveforms for optimal gravity field recovery. Geophys J Int 163:79–89. doi:10.1111/j.1365-246X.2005.02724.x
Sandwell DT, Smith WHF (2009) Global marine gravity from retracked Geosat and ERS-1 altimetry: ridge segmentation versus spreading rate. J Geophys Res 114:B01411. doi:10.1029/2008JB006008
Scharroo R (2012) RADS version 3.1: user manual and format specification. Delft University of Technology, Delft
Schmidt M, Fengler M, Mayer-Gürr T, Eicker A, Kusche J, Sánchez L, Han S-C (2007) Regional gravity modeling in terms of spherical base functions. J Geod 81:17–38. doi:10.1007/s00190-006-0101-5
Schuh W-D (1996) Tailored numerical solution strategies for the global determination of the Earth’s gravity field, Technical Report. Technical University Graz, Graz
Slobbe DC (2013) Roadmap to a mutually consistent set of offshore vertical reference frames, Ph.D. Thesis. Delft University of Technology, Delft
Slobbe DC, Klees R (2014) The impact of the dynamic sea surface topography on the quasi-geoid in shallow coastal waters. J Geod 88:241–261. doi:10.1007/s00190-013-0679-3
Slobbe DC, Klees R, Gunter BC (2014) Realization of a consistent set of vertical reference surfaces in coastal areas. J Geod 88:601–615. doi:10.1007/s00190-014-0709-9
Smith WHF (2010) The marine geoid and satellite altimetry. In: Barale V, Gower JFR, Alberotanza L (eds) Oceanography from space, pp 181–193. doi:10.1007/978-90-481-8681-5_11
Tenzer R, Klees R (2008) The choice of the spherical radial basis functions in local gravity field modeling. Stud Geophys Geod 52:287–304. doi:10.1007/s11200-008-0022-2
Tenzer R, Prutkin I, Klees R (2012) A comparison of different integral equation-based approaches for local gravity field modelling. In: Kenyon S, Pacino MC, Marti U (eds) Geodesy for planet Earth. International Association of Geodesy Symposia, vol 136, pp 381–388. doi:10.1007/978-3-642-20338-1_46
Wittwer T (2009) Regional gravity field modelling with radial basis functions, Ph.D. Thesis. Delft University of Technology, Delft
Zijl F, Verlaan M, Gerritsen H (2013) Improved water-level forecasting for the Northwest European Shelf and North Sea through direct modelling of tide, surge and non-linear interaction. Ocean Dyn 63:823–847. doi:10.1007/s10236-013-0624-2
Acknowledgments
The study was executed in the framework of the Netherlands Vertical Reference Frame (NEVREF) project, funded by the Dutch Technology Foundation STW. The data sets and models used in this study were provided by a number of institutions: British Geological Service, Bundesamt für Kartographie und Geodäsie (Germany), Institut für Erdmessung of the Leibniz University Hannover, Bureau Gravimétrique International, Banque de données Gravimétriques de la France, and Bureau de Recherches Géologiques et Minières, the Netherlands Ministry of Infrastructure and the Enviroment/Rijkswaterstaat, the Netherlands Kadaster, the National Geographic Institute of Belgium, and Deltares. Radar altimeter data were extracted from the Radar Altimeter Database System, RADS (Scharroo 2012). These supports are gratefully acknowledged. We are thankful to Pavel Ditmar for his support and valuable discussions. We thank the editor, Benoit Meyssignac, three anonymous reviewers, and Jürgen Kusche for their constructive remarks and corrections, which helped us to improve the quality of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Farahani, H.H., Slobbe, D.C., Klees, R. et al. Impact of accounting for coloured noise in radar altimetry data on a regional quasi-geoid model. J Geod 91, 97–112 (2017). https://doi.org/10.1007/s00190-016-0941-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00190-016-0941-6