
Abstract
This paper provides a thorough investigation of a heat conduction problem that pertains to tolerance modelling in layered materials made up of multiple components. These media are functionally graded materials and thus have varying properties that affect their effectiveness. The proposed equations explain the conduction of heat in layered composites. The formulation involves partial differential equations, which utilise smooth and slowly varying functions. Notably, an extension of the unified tolerance modelling procedure is presented generalising existing models for two-component step-wise functionally graded materials (FGMs). This extension allows for the analysis of specific issues related to heat conduction in multi-component stratified composites with a transversal gradation of effective properties. This is the most important novelty achievement of the present paper because it will contribute to advancing knowledge and allows researchers, engineers, and practitioners to use the method in a broader context, addressing a more extensive set of real-world situations not limited to the number of component materials.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Layered composites have a wide range of applications in various industries due to their unique combination of properties. Their specific properties depend on the materials used, the stacking sequence, and the manufacturing process. Layered composites often have high strength and stiffness, making them structurally efficient. The arrangement of layers with different orientations and fibre-reinforced materials enhances the resistance to applied loads, providing excellent strength-to-weight ratios [1]. Layered composites are known for their lightweight nature. The use of lightweight reinforcement materials, such as carbon fibres or aramid fibres combined with a low-density matrix, results in composites with significantly reduced weight compared to traditional materials like metals. This property contributes to fuel efficiency, improved performance, and ease of handling. Layered composites also offer excellent thermal and electrical insulation properties [2]. These and many other specific properties promote layered composites to be used, for instance, in aerospace and aviation, marine, automotive industry, constructions and infrastructure, electrical and electronics, sporting goods, medical and healthcare. However, layered composites can be prone to delamination, which refers to the separation or failure of the interfaces between individual layers or plies. Delamination occurs primarily due to excessive inter-laminar stresses or inadequate bonding between layers [3]. It results from either a significant mismatch in material properties, inadequate bonding, cyclic loading and fatigue, sudden impacts or high loading rates or environmental effects, i.e. exposure to moisture [4], temperature variations, or chemicals. The most crucial mismatches are in stiffness, strength, or thermal expansion coefficients between adjacent layers, together with an unfavourable changing environment in which the composite remains under loading. The second critical aspect in maintaining the integrity of the composite is the adhesive or bonding material used between the composite layers [5, 6]. To avoid delamination for the reasons mentioned above, it is necessary to take care of the match in stiffness, strength, or thermal expansion coefficients between adjacent layers to reduce stress concentrations, improve bonding techniques—properly prepare surface and select appropriate adhesives [7, 8], incorporate inter-laminar toughening mechanisms: introducing toughening mechanisms such as toughened interlayers, nano-reinforcements, or fibre bridging to enhance inter-laminar fracture toughness and resist delamination propagation [9], utilise through-thickness reinforcement, such as stitching or z-pinning, to enhance the inter-laminar strength and reduce delamination susceptibility [10, 11], provide regular inspections, non-destructive testing methods, and structural health monitoring techniques to help detect early signs of delamination and enable timely repair or maintenance [12].
All of mentioned above problems or/and waste of time and funds to mitigate delamination in layered composites are overcome by replacing conventional laminated composites with materials characterised by functional gradation. Functional gradation refers to the gradual transition or variation of material properties within a component or structure. This concept is often used to optimise the performance of a given media or all of a system by tailoring material properties to specific requirements. Materials that can exhibit functional gradation of effective material properties are, for example, polymer composites, metal or ceramic matrix composites (MMCs and CMCs), functionally graded laminates (FGLs), also known as functionally graded materials (FGMs) and even some biological tissues [13,14,15]. Some polymer composites aim to mimic the structure and properties of natural materials, such as bones or nacre [16]. These composites can exhibit functional gradation by replicating the gradual variation in material composition and microstructure found in natural materials. This can result in enhanced mechanical performance and damage tolerance. Functional gradation can be achieved by varying the composition, microstructure, or reinforcement distribution within the material. The specific materials and fabrication techniques used depend on the desired properties and the intended application of the functional gradation. Composites with functional gradation refer to composite materials where the composition, reinforcement, or other characteristics vary gradually within the material. This gradual variation can be achieved by controlling parameters such as fibre orientation, fibre volume fraction, or the distribution of other reinforcing elements within the polymer matrix [17,18,19,20,21,22]. Among composites with functional gradation, laminates occupy a special place. Laminated composites with functional gradation, also known as functionally graded laminates (FGLs) or just functionally graded materials (FGMs), composed of multiple layers or plies and are a type of composite that exhibits a gradual variation in material composition, properties, or layer arrangement within the laminate structure. Unlike traditional laminated composites, whose layers are typically uniform, FGLs (FGMs) intentionally introduce a graded transition to achieve specific functional characteristics. The stacking sequence and the properties of individual layers can be varied to create new materials with unprecedented qualities. Gradual variation allows for tailoring specific material properties and functionalities in different regions of the composite. This allows for optimising properties like stiffness, strength, fracture toughness and thermal or electrical conductivity in different composite regions [23,24,25,26]. FGMs are heterogeneous composite materials in which the material properties are gradually varied along a certain direction or through the thickness of the material as a function of the position coordinates to achieve desired specific requirements or optimise performance. The grading can be achieved by adjusting factors such as material composition, fibre volume fraction, fibre orientation, layer thickness, or a combination of these factors. For example, to have high strength on one side and high toughness on the other, to optimise the material performance under varying loading conditions or to have regions with different mechanical responses to optimise load-bearing capacity or tailor structural performance. The key idea behind FGLs or FGMs is to create a material or structure with a smooth transition between different properties, enabling seamless integration of functionalities or optimised mechanical response. That is why typical FGMs are composites which possess continuously varying composition, microstructure and material properties without internal boundaries [27]. The second group of materials with functional gradation are step-wise graded FGMs. Step-wise graded FGMs, refer to functionally graded materials that exhibit a stepped or discrete variation in material composition or properties [28]. Instead of a gradual transition, step-wise graded FGMs have distinct layers with different properties. Each layer is homogeneous and exhibits a consistent property within itself. The change in properties occurs abruptly between adjacent layers. The step-wise grading allows for precise control over the material properties, but the transition between layers is not as smooth as in FGLs. It should be mentioned here that when the number of layers is very high, the step-wise graded FGMs at a macro-level can be treated as having continuously varying microstructure and properties; the individual components (layers) are visible just at the micro-level (Fig. 1.). Studying on this type of FGMs involves analysis the behaviours, characteristics of individual elements and its detailed interactions, to gain a comprehensive understanding of composite as a whole. Both of these types of composites offer unique opportunities for tailoring material behaviour, and they differ in the nature of their graded transitions, but both of them significantly or completely reduce stress concentrations [29] and find applications in various fields, including aerospace, automotive, energy, biomedical, and more, where the graded variations in properties offer advantages in terms of performance, functionality, or structural integrity. This prevents cracks or failure initiation at interfaces between different materials, enhancing the component durability.
In building constructions, FGLs and step-wise FGMs find several applications. FGLs can be used in the construction of structural components such as beams, columns, and slabs. By gradually varying the material properties, such as stiffness or strength, along the length or thickness of the laminate, FGLs can be designed to optimise load distribution, enhance structural integrity, and improve overall performance. This allows for tailored designs that can withstand specific loading conditions, such as high loads or seismic forces. Also, FGLs can contribute to sustainable building practices by utilising recycled or environmentally friendly materials in their composition. By grading the material properties, FGLs can optimise the use of resources, reduce waste, and promote sustainable construction practices. Step-wise graded FGMs find similar applicability. For example, step-wise graded FGMs can be incorporated into reinforced concrete structures to enhance their load-bearing capacity and durability. By introducing layers with varying mechanical properties, such as modulus of elasticity or strength, the FGM can provide localised reinforcement where higher stresses or structural weaknesses exist. This can improve the overall structural performance and resistance to cracking or failure.
One of the benefits of FGLs and step-wise FGMs is good thermal management. FGLs and step-wise FGMs having variable thermal conductivity or thermal expansion coefficients along the given direction or through the thickness can be utilised for efficient heat dissipation or thermal barrier coatings. Step-wise graded FGMs, by having distinct layers with different thermal conductivity or coefficient of thermal expansion, can minimise heat transfer and thermal stresses fining applications to improve the energy efficiency of building constructions and reduce thermal fluctuations in walls or roofs [30,31,32].
The thermal and thermomechanical problem in two-component layered periodic composites, FGLs, and step-wise FGMs is well-known in the literature. Various thermal and thermomechanical problems for both periodically and functionally graded heterogeneous stratified structures can be solved using the tolerance modelling (tolerance averaging technique) proposed in [33, 34] and developed in [35]. A characteristic feature of the tolerance modelling for heterogeneous structures is the replacement of the set of differential equations with highly oscillating and non-continuous coefficients by equations with smooth and constant (if the structure is periodic) or slowly varying (if the structure is functionally graded) coefficients. Moreover, these coefficients depend on the microstructure length parameter [36]. Thus, the tolerance modelling is a valuable tool for the analysis of the effect of the microstructure length size on the overall (microscopic) behaviour of the composite [37, 38]. In recent years, the tolerance modelling for functionally graded structures has been widely discussed, e.g. for heat conduction in longitudinally graded structures [39,40,41], for heat conduction in transversally graded structures [31, 42, 43], for thermoelasticity of transversally graded laminates [36, 44] and also for biperiodic composites [45, 46]. It must be emphasised that all the above investigations concern two-component structures.
In thermal problems in step-wise graded functionally graded materials (FGMs) or in functionally graded laminates FGLs, an important issue is the determination of the effective thermal conductivity coefficient, which represents the overall thermal transport behaviour of the graded material. Various models are available to calculate this coefficient [47, 48]. The choice of model depends on the complexity of the step-wise graded FGM structure, available data, and desired accuracy. It is important to note that no single model can capture all the complexities of the graded material, and the accuracy of the predictions may vary depending on the assumptions and limitations of the chosen model. In the tolerance averaging technique, one of the steps necessary to solve a given boundary problem is always determining the effective thermal conductivity [49]. The basic concept for tolerance modelling of heat conduction in multi-component composites was presented by Woźniak [50, 51] and applied, e.g. for modelling of heat conduction in periodic structures in [41, 52], in step-wise FGMs in [53], and for modelling of elastostatic problems in [54, 55].
The fundamental difference between tolerance modelling of multi-component composites and modelling two-component composites is the new form of the fluctuation shape function. This function will be introduced in the following sections of this paper.
The main aim of this paper is to derive mathematical models for heat conduction in multi-component step-wise graded FGM as an extension of existing methods for two-component materials with functional gradation. This extension to a more general case broadens the utility of the tolerance averaging technique by being applicable to a broader range of problems and scenarios. This will contribute to advancing knowledge and allows researchers, engineers, and practitioners to use the method in a broader context, addressing a more extensive set of real-world situations not limited to the number of component materials.
2 Multi-component step-wise FGMs
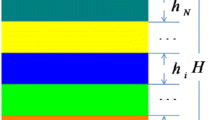
Multi-component step-wise functionally graded materials involve the integration of multiple constituent materials or components with different properties and are arranged in a step-wise manner to create graded variations in composition, structure, or properties. The concept of multi-component step-wise FGMs allows for greater control over the material properties and performance. By selecting different materials for each component, it is possible to achieve specific functionalities or optimise desired properties. The step-wise arrangement of the components enables a smooth transition of properties and facilitates the integration of multiple functionalities within a single material. It is worth noting that the design and fabrication of multi-component step-wise FGMs can be challenging due to the need for precise control over material composition, layer thickness, and interfaces. To achieve the desired graded structures and properties, advanced manufacturing techniques such as additive manufacturing, powder metallurgy, or physical vapour deposition (PVD) often need to be employed [56]. In a multi-component step-wise FGM, the material composition or properties change abruptly at each interface between the constituent components. These interfaces act as distinct layers within the graded material, and the properties can be tailored by adjusting the composition, thickness, or arrangement of these layers. However, as was said in the introduction, when the number of layers is very large at the macro-scale, the boundaries between the different layers become blurred, and the individual components (layers), i.e. the structure of the composite, are visible at the micro-level. Figure 1 presents the scheme of the analysed composite, which is a rigid heat conductor that occupies the region \(\mathrm {\Omega }\equiv {\mathbf {\Xi }}\times \left( 0,L \right) \), in the physical space parameterised by orthogonal Cartesian coordinate system \(\textrm{O}x^{1}x^{2}x\), where \({\mathbf {\Xi }}\) is a region on the plane \(\textrm{O}x^{1}x^{2}\). The composite has an unlimited dimension in the \(\textrm{O}x^{2}\) direction. The left-hand side of the scheme shows the composite at the macro-level with blurred interfaces, and the right-hand side of the scheme shows the structure of an example of one multi-component layer included in the composite on a micro-scale. The composite is assumed to be homogeneous in the \(\textrm{O}x^{1}\) and \(\textrm{O}x^{2}\) directions and multilayered in the \(\textrm{O}x\) direction. On a micro-scale, the composite consists of a large number \(N \quad \left( \frac{1}{N}<< 1 \right) \) of layers with constant (identical) thickness \(\eta \), \(\eta =\frac{L}{N}\).
Each layer is composed of P sublayers made of M homogeneous, perfectly combined materials. The number of sublayers is at least equal to the number of materials. Moreover, hereby, we assume that such materials are orthotropic because most of the existing analytical solutions in the literature apply to bodies as such, and because materials, e.g. wood, many crystals or rolled metals are orthotropic. Furthermore, for laminated composites or fibre-reinforced materials, there are many methods for calculating accurately, to a certain extent, the components of the thermal conductivity tensor with knowledge of the structure of the materials, thermal conductivities, and volume fractions of the individual components. This makes it possible to compare the provided results with already existing solutions.
The thermal properties of the p-th sublayer made of a given material are described by the second-order heat conduction tensor:
and the volumetric heat capacity scalar \(C_{p}\) (product of the mass density and specific heat capacity). In each multi-component layer, it can be introduced the midplane of this layer, \(x_{n}\equiv \frac{\eta }{2}+\left( n-1 \right) \eta \), \(n=1,\ldots ,N\). Moreover, to describe the structure of the composite, i.e. the distribution of the materials, let us establish continuous functions \(\varphi _{p}\left( \cdot \right) \in C^{1}\left( \left[ 0,L \right] \right) \), such that \(\varphi _{1}\left( x \right) +\cdots +\varphi _{P}\left( x \right) =1\) for every \(x\in \left( 0,L \right) \) and \(\eta \left| \partial _{x}\varphi _{p}\left( x \right) \right| \ll 1\) where \(p=1,...,P\). These functions should slowly change their values along the \(\textrm{O}x\) axis. This means that two adjacent layers are indistinguishable from each other. The values of these functions on the midplane assigned to the n-th layer will be interpreted as the material fraction of the p-th sublayer in this layer.
The thicknesses of sublayers in the n-th layer are assumed to be equal to \(\eta _{p}=\varphi _{p}\left( x_{n} \right) \eta \) and the region occupied by p-th sublayer of the n-th layer can be written as \(\mathrm {\Omega }_{p}={\mathbf {\Xi }}\times \left( x_{n}-\frac{\eta }{2}+\sum \nolimits _{i=1}^{p-1} {\eta _{p-1}\left( x_{n} \right) },x_{n}-\frac{\eta }{2}+\sum \nolimits _{i=1}^p {\eta _{p}\left( x_{n} \right) } \right) \).
If \(\varphi _{p}\left( \cdot \right) \) are constant functions, then the composite is characterised by periodic structure, i.e. the structure is regular, and each layer has the same arrangement of sublayers.

Scheme of a multi-component step-wise FGM at the macro-scale and view of its one layer at the micro-scale
3 Parabolic-type heat conduction in multi-component step-wise FGMs
The parabolic heat conduction equation is derived from Fourier’s law of heat conduction [57], which states that the heat flux in a material is proportional to the negative gradient of temperature. It takes into account the thermal conductivity of the material and the temperature distribution within it. Denoting by \(\theta =\theta \left( \textbf{x},t \right) \) the temperature field in region \(\mathrm {\Omega }\) (\(\textbf{x}=\left( x^{1},x^{2},x \right) , t\in \left[ 0,t_{*} \right] )\), the heat conduction equations, assuming that the internal heat generation is equal to 0, will take the form:
where \(k^{\alpha \beta }\left( \cdot \right) \) and \(k\left( \cdot \right) \) are the components of the heat conduction tensor, which are \(k^{\alpha \beta }\left( \cdot \right) =k_{p}^{\alpha \beta }\left( \cdot \right) \) and \(k\left( \cdot \right) =k_{p}\left( \cdot \right) \) when \(\textbf{x}\in \mathrm {\Omega }_{p}\), \(C\left( \cdot \right) \) is the specific heat, which is equal to \(C_{p}\left( \cdot \right) \) when \(\textbf{x}\in \mathrm {\Omega }_{p}\), \(\alpha \) and \(\beta \) take the values of 1 and 2 (summation is performed over repeated subscripts), \(\partial _{\alpha }=\frac{\partial }{\partial x^{\alpha }},\ \partial _{\beta }=\frac{\partial }{\partial x^{\beta }}\), \(\partial =\frac{\partial }{\partial x}\),\( \partial _{t}=\frac{\partial }{\partial t}\).
Equation (1) represents a partial differential equation with discontinuous and highly oscillating coefficients \(k^{\alpha \beta }\left( \cdot \right) \), \(k\left( \cdot \right) \) and \(C\left( \cdot \right) \), which depend only on x coordinate. The direct application of Eq. (1) in most cases is too complicated from the practical point of view. Below will be formulated the approximate tolerance models for the heat conduction problems, where Eq. (1) is replaced by equations having smooth and slowly varying coefficients.
4 Modelling concepts
The basic concepts and assumptions of the tolerance modelling method are presented, for example, in [35]. In this paper, these definitions will be adapted to the object of the analysis as it was done in [58].
4.1 Tolerance
The starting point of consideration is the concept of tolerance. As is well-recognised, any observation, measurement or numerical calculation is done with a certain degree of accuracy. The concept of a tolerance system in applications to mechanics was introduced by Woźniak in [59] and is a specific generalisation of the tolerance space defined by Zeeman [60].
Overall, the concept of tolerance in mechanics highlights the importance of robustness and stability in understanding the behaviour of complex systems, especially in the presence of small perturbations or parameter variations. Woźniak’s relationship of tolerance is interpreted as a specific “relationship of indistinguishability”. For every \(\left( \mu ,\nu \right) \in R^{2}\) from a computational viewpoint, the relation \(\mu \sim ^{\delta }\nu \) means that \(\mu \) can be approximated with a required accuracy \(\delta \) by \(\nu \) and vice versa, if and only if \(\left| \mu -\nu \right| \le \delta \).
The main new result of this paper is to obtain four mathematical models, using the extended concept of slowly varying functions, for heat conduction in multi-component composite with step-wise functionally graded material properties.
4.2 Slowly varying functions
The concept of tolerance is used to formulate definitions of slowly varying functions on which the tolerance modelling is based. These definitions have been extended in [58, 61] to formulate new mathematical models for heat conduction in a two-component composite with step-wise functionally graded material properties. Five systems of tolerance model equations were conceived there for special kinds of slowly varying functions.
Definitions of two classes of slowly varying functions—weakly slowly varying function (WSV) and slowly varying function (SV) will be quoted below after [58] but limited to space R.
To begin with, the tolerance parameter should be specified. As was said, this parameter is a criterion that determines the acceptable deviation or error from a desired or specified value. Here, tolerance parameter is a triplet of the real positive number \(d\equiv \left( \eta ,\delta _{0},\delta _{1} \right) \). In addition, let \(\Lambda =\left( 0,L \right) \) stands for an arbitrary convex set in the space R and let \(f\in C^{1}\left( \overline{\Lambda } \right) \) be an arbitrary real-valued function. Then:
-
1.
Function f is weakly slowly varying \((f\in WSV_{d}^{1}\left( \Lambda \right) \subset C^{1}\left( \Lambda \right) )\) if the condition \(\left| x-y \right| \le \eta \) yields to the conditions \(\left| f\left( x \right) -f\left( y \right) \right| \le \delta _{0}\) and \(\left| \partial f\left( x \right) -\partial f\left( y \right) \right| \le \delta _{1}\) for all pairs \(\left( x,y \right) \in \Lambda ^{2}\).
-
2.
Function f is slowly varying \((f\in SV_{d}^{1}\left( \Lambda \right) )\) if \(f\in WSV_{d}^{1}\left( \Lambda \right) \) and additionally the condition \(\eta \left| \partial f\left( x \right) \right| \le \delta _{0}\) is satisfied for every \(x\in \Lambda \). Clearly, \(WSV_{d}^{1}\left( \Lambda \right) \supset SV_{d}^{1}\left( \Lambda \right) \).
It is necessary to define the tolerance parameter as a set of three parameters because the distance between two points \(\left( x,y \right) \in \Lambda ^{2}\), the functions depending on the coordinates of the position of these two points \(f\left( x \right) \) and \(f\left( y \right) \), and their derivatives \(\partial f\left( x \right) \) and \(\partial f\left( y \right) \) are determined with different accuracies since they are endowed with different units of measure. Two points of the interval \(\Lambda =\left( 0,L \right) \) will be indistinguishable only if the distance between two points endowed with unit measures of length is less than the tolerance parameter \(\eta \), that is, \(\left| x-y \right| \le \eta \). Meanwhile, the derivative of order k of the function \(f\in C^{m}\left( \overline{\Lambda } \right) \), where \(k=0,\ldots ,m\) and \(m\ge 0\) should be assigned the tolerance parameter \(\delta _{k}\). Thus, it is easy to see that the tolerance is defined by an \(m+1\)-element sequence of tolerance parameters \(\left( \delta _{0},\delta _{1},\ldots ,\delta _{m} \right) \). Thus, in the considerations carried out, the sequence of tolerance parameters relating to the function f took the form \(\left( \delta _{0},\delta _{1} \right) \) because \(f\in C^{1}\left( \overline{\Lambda } \right) .\)
Note also that in the definition of slowly varying function appears an additional postulate \(\eta \left| \partial f\left( x \right) \right| \le \delta _{0}\) that absolute values of the linear part of increments of \(f\in C^{1}\left( \overline{\Lambda } \right) \) are negligibly small in \(\Lambda =\left( 0,L \right) \).
This condition appeared already at the stage of description of the composite which is the subject of consideration in the paper. Step-wise FGMs composites are a group of media with deterministic structure which on a macro-scale are characterised by a continuous change (gradation) of effective properties, and from the theoretical point of view the first problem to be solved is to formulate a physical mathematical description of the structure of this composite which would be reliable. At the micro-level, every two adjacent layers are indistinguishable from each other; however, layers lying at a considerable distance on a micro-scale can be distinguished even with the naked eye.
We remark also that Nagórko and Woźniak in [61] formulated similar subclasses of slowly varying functions to extend the tolerance modelling technique for bidirectionally graded heat conductors, and for more comprehensive information regarding the concept of tolerance in tolerance modelling, we encourage to take a closer look at the paper [62].
4.3 Averaging operator and tolerance averaging approximations
Independently of the tolerance in the modelling procedure, there is also the introduction of the notion of averaging operator and tolerance averaging approximations.
In order to establish a clear understanding of averaging operator for some function \(h\left( \cdot \right) \), the following notations are needed:
-
interval \(\Delta \equiv \left( -\frac{\eta }{2},\frac{\eta }{2} \right) \)
-
local interval \(\Delta \left( x \right) \equiv \left( x-\frac{\eta }{2},x+\frac{\eta }{2} \right) \) for every \(x\in \left( \frac{\eta }{2},L-\frac{\eta }{2} \right) \) (Fig. 2).
-
local cell. Each interval \(\Delta \left( x \right) \), together with \(k_{x}^{\alpha \beta }\left( \cdot \right) {k_{x}\left( \cdot \right) ,C}_{x}\left( \cdot \right) \) and local fluctuation shape function \(\gamma _{x}\left( \cdot \right) \) defined almost everywhere on \(\Delta \left( x \right) \), will be described the local cell.
-
material cell. If \(x=x_{n}\), \(n=1,\ldots ,N\) then the local cell will be termed the material cell.
-
arbitrary integrable function \(h_{x}\in L^{2}\left( \left( 0,L \right) \right) \).

A scheme of the local interval and local fluctuation shape function
Then, the averaging operator for the function \(h\left( \cdot \right) \) is defined as:
Now having functions \(h_{x}\in L^{2}\left( \Delta \left( x \right) \right) \) and \(f\in WSV_{d}^{1}\left( \left( 0,L \right) \right) \), the main mathematical tool of the tolerance modelling procedure can be formulated, i.e. the tolerance averaging approximations are:
This means that in averaging equations involving weakly slowly varying or slowly varying functions and their derivatives, the left-hand sides of formulas (3) will be approximated respectively by their right-hand sides. It has to be emphasised that the function f represents unknown fields in the problem under consideration. Moreover, all that is known about these functions is that their values have to be calculated within the tolerances determined respectively by certain tolerance parameters. If these parameters are specified, then the criteria of applicability of tolerance averaging approximations can be verified a posteriori, i.e. after finding the functions f.
If the tolerance parameters are not specified, then they can be calculated after finding functions f from the conditions \(f\in WSV_{d}^{1}\left( \left( 0,L \right) \right) \); in this way, the accuracy of the obtained solutions can be evaluated [63].
The presented tolerance averaging approximations allow a mathematical description of physical phenomena and processes that cannot be described, for example, within the framework of asymptotic homogenisation theory. It should be noted that the proposed approach first uses some general physical concepts and only later gives these concepts a mathematical form. The proof of these propositions is given in [34].
4.4 Global and local fluctuation shape function
Fluctuation shape functions are a fundamental component of tolerance modelling and provide a mathematical representation of the variation of unknown quantities within each element of composite structure [64]. These functions describe the spatial distribution of the unknown quantity within the analysed element and allow for the approximation of the field variable across the entire structure domain. The fluctuation shape functions typically have specific mathematical properties and are defined based on the structure type and its geometry.
Previous papers concerning tolerance modelling analysed mainly two-component composites. The fluctuation shape function formulated there had a form which was proper only for structures of this type [31, 42, 44]. Furthermore, due to the specific form of fluctuation shape function used there, a limit passing to a one-component body was impossible. The term of a fluctuation shape function for heat conduction problems, introduced at a Polish local conference by Woźniak [51] and applied by Szlachetka and Wągrowska [41, 65], makes it possible to describe the structure of periodic multi-component layered composite. In [41], it was proved that the global fluctuation shape function is equal to zero on the interfaces between the layers only if the structure of the periodicity layer is symmetrical with respect to the midplane of this layer. In other variants of material distribution, on the interfaces they had values different from zero. Woźniak, at other Polish local conferences, introduced the form of fluctuation shape function for multi-component step-wise FGMs for elastodynamics problems. Szlachetka and Wągrowska reformulated this function for heat conduction problems [53, 66]. This function allows the limit to pass from a multi-component to a one-component body. The form of fluctuation shape function for elastostatic problems in multi-component step-wise FGMs was also proposed in [54, 55].
Below it will be presented the global fluctuation shape function for heat conduction problems used in this paper. The real-valued function \(\gamma \left( \cdot \right) \in C^{0}\left( \left[ 0,L \right] \right) \) is a global fluctuation shape function in every interval \(\left( x_{n}-\frac{\eta }{2},x_{n}+\frac{\eta }{2} \right) \), if \(\gamma \left( \cdot \right) \) is linear in intervals: \(\left( \left( x_{n}-\frac{\eta }{2}+\sum \nolimits _{i=1}^{p-1} {\eta _{p-1}\left( x_{n} \right) } \right) ,\left( x_{n}-\frac{\eta }{2}+\sum \nolimits _{i=1}^p {\eta _{p}\left( x_{n} \right) } \right) \right) \), with values on the interfaces between sublayers of a layer given by \(\gamma _{p}^{n}=\gamma _{p-1}^{n}+\eta \varphi _{p}\left( x_{n} \right) \left( \frac{k_{eff}\left( x_{n} \right) }{k_{p}\left( x_{n} \right) }-1 \right) \), \(p=1,2, ..., P\), \(n=1,2,...,N\) where \(k_{eff}\left( \cdot \right) \) is effective conductivity coefficient \(k_{eff}\left( x_{n} \right) \equiv \left( \frac{\varphi _{1}\left( x_{n} \right) }{k_{1}}+...+\frac{\varphi _{P}\left( x_{n} \right) }{k_{P}} \right) ^{-1}\) and \(\left\langle \gamma \right\rangle =0\). Taking the assumptions mentioned above into consideration, the equation for global fluctuation shape function \(\gamma \left( \cdot \right) \) can be written in the form:
with the condition that \(\gamma _{p=P}=0\).
Independent of the global fluctuation shape function \(\gamma \left( \cdot \right) \) that describes the real geometry of the composite, the modelling process requires defining the local fluctuation shape function \(\gamma _{x}\in C^{0}\left( \Delta \left( x \right) \right) \) for every \(x\in \left( 0,L \right) \). Obviously \(\gamma _{x_{n}}\left( \cdot \right) =\gamma \left( \cdot \right) \left| \Delta \left( x_{n} \right) \right. \), \(i=1,...,n\). The diagrams of the functions \(\gamma \left( \cdot \right) \) and \(\gamma _{x}\left( \cdot \right) \) are shown in Fig. 2 and Fig. 3, respectively.

A scheme of the real interval and global fluctuation shape function
5 Tolerance modelling procedure
The process of the tolerance averaging technique is based on two assumptions.
Assumption 1
The first assumption, called micro–macro-decomposition of the temperature field \(\theta \left( \cdot \right) \) says that the temperature field \(\theta \left( \cdot \right) \) in the considered structure can be approximated by \(\tilde{\theta }\left( x,t \right) \) which is the sum of macro-temperature (averaging temperature) \(\vartheta \left( \cdot \right) \) and the product of global fluctuation shape function and amplitude of temperature fluctuations \(\psi \left( \cdot \right) \):
Functions \(\vartheta \left( \cdot \right) \) and \(\psi \left( \cdot \right) \) are two new unknowns that, in the next step of the modelling process, we will assume to be weakly slowly varying functions or slowly varying functions to obtain some specific systems of model equations similar to those in [58].
Under the decomposition introduced by (5), the governing equations of parabolic heat conduction given by (1) are satisfied only in a certain averaged form. To provide clarity, it should be defined the function \(r_{x}\left( \cdot \right) \) which is defined almost everywhere in \(\mathrm {\Omega }\times \left( 0,t_{*} \right) \):
where \(\tilde{\theta }\left( \cdot \right) \) is given by (5).
Assumption 2
The second assumption says that the residuum function (6) satisfies on its domain some orthogonal conditions for every \(x\in \left( 0,L \right) \):
This approach, for example, was also used by Ostrowski and Jędrysiak in their consideration of the dependence of temperature fluctuations on randomised material properties in two-component periodic laminate [67] and by Pazera and Jędrysiak [36] in consideration of the effect of microstructure in thermoelasticity problems of FGM laminates.
In this modelling step, instead of introducing the function (6) and deriving the model equations from conditions (7), the heat conduction in the considered composite can be described by an action functional in which the Lagrangian involved is assumed to be weakly slowly varying or slowly varying. Then, the variation of this functional is calculated and equated to zero, which leads to the Euler–Lagrange equations. Then, using these equations and taking into account the assumption of micro–macro-decomposition (5) and the concepts of the tolerance averaging approximations (3), the equations of the model are obtained. This approach is used by many authors using the tolerance averaging technique, for example, by Tomczyk and Gołąbczak in [38] for modelling dynamic thermoelasticity problems in thin micro-periodic cylindrical shells and by Kubacka and Ostrowski in [45] for modelling heat conduction problems in biperiodic composites. Both ways lead to the same model equations.
6 Tolerance models
The following subsections will present the four tolerance models for heat conduction in multi-component step-wise graded FGM as an extension of existing models for two-component step-wise FGM.
6.1 General model
The derivation of the equations of the general model will be presented below.
Let us recall that \(\vartheta \left( {\mathbf {\Xi }},\cdot , t \right) \) and \(\psi \left( {\mathbf {\Xi }},\cdot , t \right) \) are weakly slowly varying functions, i.e. \(\vartheta \left( {\mathbf {\Xi }},\cdot , t \right) \in WSV_{d}^{1}\left( \left( 0,L \right) \right) \) and \(\psi \left( {\mathbf {\Xi }},\cdot , t \right) \in WSV_{d}^{1}\left( \left( 0,L \right) \right) \). Firstly, by using the first condition from (7), i.e. \(\left\langle r \right\rangle _{T}\left( x \right) =0,\) and substituting \(\tilde{\theta }\left( \cdot \right) \) given by Eq. (5), one gets:
when expanded, one obtains:
If further expanded and using the definition of tolerance averaging (3), weakly slowly varying functions, i.e. \(\vartheta \) and \(\psi \) and their derivatives, can be excluded from averaging.
Because the shape function is linear and does not depend on time and \(x^{1}\) and \(x^{2}\) coordinates, the single-line underlined contributions in (10) are equal to zero.
Moreover, equation (10) simplifies because some averages are equal to zero \(\left\langle \gamma \right\rangle =0\) and \(\left\langle k\gamma \right\rangle =0\), \(\left\langle k^{\alpha \beta }\gamma \right\rangle =0\) for \(\alpha , \beta =1,2\). Terms that vanish due to the above reason are underlined in (10) with a double line.
Finally, the first equation of the general model takes the following form:
To deduce the second equation of the general model, we substitute \(\tilde{\theta }\left( \cdot \right) \) given by (5) in (6) and make use of the second condition from (7), i.e. \(\left\langle r\gamma \right\rangle _{T}\left( x \right) =0\), i.e.
Below, each part of the above equation will be considered separately.
When the first term in (12), i.e. \(\left\langle {\gamma k}^{\alpha \beta }\partial _{\alpha }\partial _{\beta }\left( \vartheta +\gamma \psi \right) \right\rangle _{T}\) is expanded and is purged from averaging weakly slowly varying functions, i.e. \(\vartheta \) and \(\psi \) and their derivatives, by using the definition of tolerance averaging (3), we get:
which reduces to:
because the parts of the expression in (13) including \(\left\langle k^{\alpha \beta }\gamma \right\rangle \) vanish.
The second term in (12) can be rewritten as shown below:
By expanding and excluding the vanishing terms originated from averaging weakly slowly varying functions, i.e. \(\vartheta \) and \(\psi \) and their derivatives, we have:
and because \(\left\langle k\gamma \right\rangle =0\), the only persistent term remains the following:
Finally, the third term in (12) can also be rewritten as shown below:
Because the shape function is linear and does not depend on time, then the term \(\left\langle {\left( \vartheta +\gamma \psi \right) \partial }_{t}\gamma C \right\rangle _{T}\) is equal to zero. By expanding \(\left\langle \partial _{t}\left( \gamma C\left( \vartheta +\gamma \psi \right) \right) \right\rangle _{T}\), we get:
and remembering that \(\left\langle C\gamma \right\rangle =0\), there will only be:
Putting together (14), (17) and (20), the equation (12) takes the form:
Therefore, the derived set of equations are:
together with Eq. (5) represents the general tolerance model for the heat conduction in multi-component step-wise FGMs composite.
The coefficients in Eq. (22) are slowly varying functions of argument \(x\in \left( 0,L \right) \) and are given by:
where \(\varphi _{0}=0\), \(\gamma _{P}=0\), and \(a_{i}\) is the slope of the fluctuation shape function in a given sublayer.
The above coefficients (23) depend on material properties as well as on the functions \(\varphi _{p}\left( \cdot \right) \).
The general model represents the starting point for deriving ulterior models. Note that a specific analysis of the direct applications of the general model to obtain solutions for engineering problems has not been conducted yet.
6.2 Standard model
In the standard model, the first equation from (22) remains unchanged. In the second equation, the term \(\partial \left( \left\langle k\left( \gamma \right) ^{2} \right\rangle \partial \psi \right) \) vanishes because in this case, we assume that \(\vartheta \left( {\mathbf {\Xi }},\cdot , t \right) \) and \(\psi \left( {\mathbf {\Xi }},\cdot , t \right) \) are slowly varying functions, i.e. \(\vartheta \left( {\mathbf {\Xi }},\cdot , t \right) \in SV_{d}^{1}\left( \left( 0,L \right) \right) \) and \(\psi \left( {\mathbf {\Xi }},\cdot , t \right) \in SV_{d}^{1}\left( \left( 0,L \right) \right) \).
In this case, the set of equations is:
6.3 Local homogenisation model
The local homogenisation model is obtained with the additional extra assumption that the term \(\left\langle C\left( \gamma \right) ^{2} \right\rangle \partial _{t}\psi \) in the second equation of (24) can be neglected. Moreover, we assume that \(\psi \left( {\mathbf {\Xi }},\cdot , t \right) \in SV_{d}^{1}\left( {\Omega } \right) \) and, thus, the term \(\left\langle k^{\alpha \beta }\left( \gamma \right) ^{2} \right\rangle \partial _{\alpha }\partial _{\beta }\psi \) in the second equation of (24) also vanishes.
In this case, the set of equations is:
From the second equation of (25), it can be obtained that:
Then substituting Eq. (26) into the first equation of (25), equation for \(\vartheta \left( \cdot \right) \) takes the form:
where \(k_{eff}\equiv \left\langle k \right\rangle -\frac{\left( \left\langle k\partial \gamma \right\rangle \right) ^{2}}{\left\langle k\left( \partial \gamma \right) ^{2} \right\rangle }\equiv \left( \frac{\varphi _{1}}{k_{1}}+\cdots +\frac{\varphi _{P}}{k_{P}} \right) ^{-1}\equiv \left( \sum \nolimits _{i-1}^P \frac{\varphi _{i}}{k_{i}} \right) ^{-1}.\)
The local homogenisation model is the simplest one and is suitable for analysing heat conduction issues in multi-component composites if the near-surface zone, i.e. at the edges crossing the layering, is not important. It is beneficial when one initially wants to determine the temperature distribution inside the composite. This model is applicable to simple engineering applications. In laboratory pilot tests for two-component periodic composites conducted by Jurczak [68] and by Szlachetka, Bagdasaryan, Wągrowska, and Dohojda [69], very good agreement was obtained between the model and measurements of the temperature inside the structure.
6.4 Local homogenisation model with a boundary layer effect
In this case, the set of equations is:
where \(\tilde{\psi }\) is given by the right-hand side of (26).
In this model, equations for \(\vartheta \) and \({\bar{\psi }}\) are independent, and the corresponding boundary value problems for these functions are coupled only by the boundary conditions. The second equation of system (14) will be called the boundary layer equation because it describes the perturbation of the temperature field associated with the form of the boundary conditions for \(\theta \left( x\textrm{,}t \right) \).
These four models are most often used in practice.
7 Example
This section presents the solution to a specific boundary value problem determined in the local homogenisation model for multi-component step-wise FGM. It will be considered the one-dimensional, stationary problem of heat conduction in the direction perpendicular to layers.
Composite occupies the region \({\Omega }\equiv R\times R\times \left( 0,L \right) \) where \(L=0.2 m\), and composed of \(N=20\) layers with constant thicknesses \(\eta =0.01~\textrm{cm}\). Each layer consists of five sublayers made of three different materials. The sublayers are symmetrically distributed with the midplane of the interval (layer). All materials of the discussed composite are assumed to be homogeneous and isotropic. The material fractions in sublayers are dependent on functions \(\varphi _{1}\left( \cdot \right) \), \(\varphi _{2}\left( \cdot \right) \), \(\varphi _{3}\left( \cdot \right) \), \(\varphi _{4}\left( \cdot \right) =\varphi _{2}\left( \cdot \right) \) and \(\varphi _{5}\left( \cdot \right) =\varphi _{1}\left( \cdot \right) \). The above functions take the form in considered example: \(\varphi _{1}=\varphi _{5}=\frac{1}{8}\frac{L-x}{L}\), \(\varphi _{2}\left( x \right) =\varphi _{4}\left( x \right) =\frac{1}{4}\frac{x}{L}\), \(\varphi _{3}\left( x \right) =\frac{3L-x}{4L}\). The thicknesses of each sublayer in several layers are not constant, but it is important to notice that every two adjacent layers can be treated as indistinguishable.
The thermal conductivity coefficients related to the corresponding sublayers are equal to \(K_{1}=K_{5}=10~\mathrm {W/mK}\), \(K_{2}=K_{4}=1~\mathrm {W/mK}\), \(K_{3}=5~\mathrm {W/mK}\).
The boundary conditions on the macro-temperature are: \(\vartheta \left( 0 \right) =\vartheta _{0}=-5^{\circ }C\), \(\vartheta \left( 20 \right) =\vartheta _{L}=25^{\circ }C\).
Figure 4 presents the global fluctuation shape function related to the analysed structure. For a better view, the part of the function assigned to the sublayer made of a particular material in the layer is drawn in a different colour. In addition, the form of the global fluctuation shape function in several selected layers is shown.

Global fluctuation shape function for considered example, a throughout the composite, b in the first layer, c in the fifth layer, d in the fifteenth layer, e in the twentieth layer
The distribution of the macro-temperature field \(\vartheta \left( \cdot \right) \) determined from Eq. 13 is shown in Fig. 5.

Distributions of the macro-temperature field \({\vartheta }\left( \cdot \right) \) for \(x\in \left( {0,0.2} \right) \)
It can be observed that the distribution of macro-temperature \(\vartheta \left( \cdot \right) \) is not a linear function as in periodic multi-component layered composite (see [41]). The macro-temperature equation is in the form:
The distribution of the temperature field \(\tilde{\theta }\left( \cdot \right) \) in the analysed composite is shown in Fig. 6, and the distribution of both \(\vartheta \left( \cdot \right) \) and \(\tilde{\theta }\left( \cdot \right) \) in the 1st, 5th, 15th and 20th layers is shown in Fig. 7.

Distribution of the approximated temperature field\( \tilde{\theta }\left( \cdot \right) \) for \({x}\in \left( {0,0.2} \right) \)

Distribution of the temperature field \({\vartheta }\left( \cdot \right) \) (dashed line) \(\tilde{\theta }\left( \cdot \right) \) (solid line) in a the first layer, b the fifth layer, c the fifteenth layer, d the twentieth layer
It is easy to notice that the distribution of field \(\tilde{\theta }\left( \cdot \right) \) varies along the \(\textrm{O}x \) axis. Let us emphasise that if we take an example where coefficients of thermal conductivity are equal to each other, the fluctuation shape function is reduced to 0. Thus, implying that \(\tilde{\theta }\left( \cdot \right) =\vartheta \left( \cdot \right) \). This means that the introduced concept of fluctuation shape function gives the possibility of the limit passing from a multi-component to a one-component body.
In this example was considered an unlimited composite in the \(\textrm{O}x^{1}\) and \(\textrm{O}x^{2}\) directions. The question arises what if the composite also had a finite dimension in the \(\textrm{O}x^{2}\) axis direction? In the interior of the conductor, the approximate temperature distribution will be as in Fig. 6; unfortunately, the same distribution will be on the edges crossing the layering. This indicates that the boundary conditions on these edges are not met. On the edges crossing the layering, the graph of the approximate temperature field should be smooth—without any oscillations.
The solution of the same composite will be presented below, however, assuming that it has a finite dimension in the direction of the \(\textrm{O}x^{2}\) axis \(L_{2}=1 m\). A local homogenisation model with a boundary layer effect will be used for the solution.
After solving the system of equations (28), equation for temperature field \(\theta \left( \cdot \right) \) takes the form:
where \(\xi =\left\{ {\begin{array}{*{20}c} x^{2}\\ L_{2}-x^{2}\\ \end{array} } \right. \) depending on the region of which of the edges cross the layering, and we determine the temperature distribution. In formula (30), \(\xi \) has a physical sense when substituted in centimetres.
Figure 8 presents the temperature field distribution \(\theta \left( \cdot \right) \) including the boundary layer effect at different distances from the edge crossing the layering for the last layer of the composite. The graph shows that as one moves away from the edge, the approximate temperature distribution approaches the temperature distribution given in Fig. 6.

Temperature distributions in twentieth layer of the composite at various distances from the edge crossing layering
8 Concluding remarks
This paper presents four mathematical models for the heat conduction in multi-component step-wise FGMs as an extension of existing tolerance modelling method for two-component step-wise FGMs. This extension to the more general case extends the utility of the tolerance averaging technique by applying it to a wider range of problems and scenarios.
What is already known from the literature, but is worth noting, is that the tolerance modelling technique cannot be treated as a purely mathematical method like homogenisation, for instance, since the tolerance averaging approximation is based on some physical premises rather than on certain formalised procedures. However, this approach leads to the collection of mathematical tolerance models describing various thermomechanical processes and phenomena. Thus, it should be emphasised that in tolerance modelling, the concept of tolerance used as a relationship of indistinguishability must use physical premises, and, therefore, knowledge and experience of the issue under study hold great importance.
As a result of applying tolerance modelling to describe the parabolic heat conduction problem for layered multi-component step-wise FGM-type structures, the equation with discontinuous strongly oscillating coefficients has been replaced by one with slowly varying coefficients. In this form, the equation does not create computational complications. Thus, the validity of the method was confirmed.
The introduced concept of fluctuation shape function allows the limit passing from a multi-component to a one-component body.
The general model represents the starting point for deriving more specified models. Note that the direct applications of the general model were not analysed to obtain solutions to specific engineering problems.
The local homogenisation model is the simplest one and is suitable for analysing heat conduction issues in multi-component composites if the near-surface zone, i.e. at the edges crossing the layering, is not important. It is beneficial when one initially wants to determine the temperature distribution inside the composite. This model is applicable to simple engineering applications.
In contrast, a local homogenisation model with a boundary layer effect allows for meeting the boundary conditions on edges crossing the layering and for analysing the temperature distribution in the near-surface zone.
The examples of the application of the local homogenisation model and local homogenisation model with boundary layer effect presented in the paper are primarily illustrative in nature, being limited to tasks that can be solved analytically. Nevertheless, these examples provide a benchmark that can be used to help solve tasks that require the use of numerical techniques, as well as other model problems. Above all, the following statements emerge from the examples presented:
-
a.
The approximate temperature distribution shows a relationship with the heterogeneous structure of the considered structure;
-
b.
For issues of heat conduction in a multi-component composite with inhomogeneity in one direction only, the sawtooth fluctuation shape function reflects well the nature of the structure of such a composite;
-
c.
Temperature disturbances arise only in the near-side areas. These areas are very small compared to the dimensions of the entire area occupied by the composite. Because the composite is not periodic, the depth of disturbance is not constant.
References
Karim, M.A., Abdullah, M.Z., Deifalla, A.F., Azab, M., Waqar, A.: An assessment of the processing parameters and application of fibre-reinforced polymers (FRPs) in the petroleum and natural gas industries: A review. Res. Eng. 18, 101091 (2023). https://doi.org/10.1016/j.rineng.2023.101091
Zhang, D.L., Zha, J.W., Li, C.Q., Li, W.K., Wang, S.J., Wen, Y., Dang, Z.M.: High thermal conductivity and excellent electrical insulation performance in double-percolated three-phase polymer nanocomposites. Compos. Sci. Technol. 144, 36–42 (2017). https://doi.org/10.1016/j.compscitech.2017.02.022
Lin, S., Ranatunga, V., Waas, A.M.: Experimental study on the panel size effects of the Low-Velocity Impact (LVI) and Compression After Impact (CAI) of laminated composites. Part I: LVI. Compos. Struct. 296, 115822 (2022). https://doi.org/10.1016/j.compstruct.2022.115822
Afshari, Z., Malek, S.: Moisture transport in laminated wood and bamboo composites bonded with thin adhesive layers—a numerical study. Constr. Build. Mater. (2022). https://doi.org/10.1016/j.conbuildmat.2022.127597
Robert, C., Mamalis, D., Obande, W., Koutsos, V., Ó Brádaigh, C.M., Ray, D.: Interlayer bonding between thermoplastic composites and metals by in-situ polymerization technique. J. Appl. Polym. Sci. 138, 1–10 (2021). https://doi.org/10.1002/app.51188
Banea, M.D., Da Silva, L.F.M.: Adhesively bonded joints in composite materials: an overview. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 223, 1–18 (2009). https://doi.org/10.1243/14644207JMDA219
Firouzi, D., Mudzi, P., Ching, C.Y., Farncombe, T.H., Ravi Selvaganapathy, P.: Use of pressure sensitive adhesives to create flexible ballistic composite laminates from UHMWPE fabric. Compos. Struct. 287, 115362 (2022). https://doi.org/10.1016/j.compstruct.2022.115362
Jeevi, G., Nayak, S.K., Abdul Kader, M.: Review on adhesive joints and their application in hybrid composite structures. J. Adhes. Sci. Technol. 33, 1497–1520 (2019). https://doi.org/10.1080/01694243.2018.1543528
Kuteneva, S.V., Gladkovsky, S.V., Vichuzhanin, D.I., Nedzvetsky, P.D.: Microstructure and properties of layered metal/rubber composites subjected to cyclic and impact loading. Compos. Struct. 285, 115078 (2022). https://doi.org/10.1016/j.compstruct.2021.115078
Gnaba, I., Legrand, X., Wang, P., Soulat, D.: Through-the-thickness reinforcement for composite structures: a review. J. Ind. Text. 49, 71–96 (2019). https://doi.org/10.1177/1528083718772299
Drake, D.A., Sullivan, R.W., Lovejoy, A.E., Clay, S.B., Jegley, D.C.: Influence of stitching on the out-of-plane behavior of composite materials—a mechanistic review. J. Compos. Mater. 55, 3307–3321 (2021). https://doi.org/10.1177/00219983211009290
Wang, B., Zhong, S., Lee, T.L., Fancey, K.S., Mi, J.: Non-destructive testing and evaluation of composite materials/structures: a state-of-the-art review. Adv. Mech. Eng. 12, 1–28 (2020). https://doi.org/10.1177/1687814020913761
Grillo, A., Federico, S., Wittum, G.: Growth, mass transfer, and remodeling in fiber-reinforced, multi-constituent materials. Int. J. Non. Linear. Mech. 47, 388–401 (2012). https://doi.org/10.1016/j.ijnonlinmec.2011.09.026
Ramírez-Torres, A., Penta, R., Rodríguez-Ramos, R., Grillo, A.: Effective properties of hierarchical fiber-reinforced composites via a three-scale asymptotic homogenization approach. Math. Mech. Solids 24, 3554–3574 (2019). https://doi.org/10.1177/1081286519847687
George, D., Spingarn, C., Dissaux, C., Nierenberger, M., Rahman, R.A., Rémond, Y.: Examples of multiscale and multiphysics numerical modeling of biological tissues. Biomed. Mater. Eng. 28, S15–S27 (2017). https://doi.org/10.3233/BME-171621
Ren, L., Wang, Z., Ren, L., Han, Z., Liu, Q., Song, Z.: Graded biological materials and additive manufacturing technologies for producing bioinspired graded materials: an overview. Compos. Part B Eng. 242, 110086 (2022). https://doi.org/10.1016/j.compositesb.2022.110086
Boggarapu, V., Gujjala, R., Ojha, S., Acharya, S., Venkateswara Babu, P., Chowdary, S., Kumar Gara, D.: State of the art in functionally graded materials. Compos. Struct. 262, 113596 (2021). https://doi.org/10.1016/j.compstruct.2021.113596
dell’Isola, F., Steigmann, D., Della Corte, A.: Synthesis of fibrous complex structures: designing microstructure to deliver targeted macroscale response. Appl. Mech. Rev. 67, 1–21 (2015). https://doi.org/10.1115/1.4032206
Schulte, J., Dittmann, M., Eugster, S.R., Hesch, S., Reinicke, T., dell’Isola, F., Hesch, C.: Isogeometric analysis of fiber reinforced composites using Kirchhoff–Love shell elements. Comput. Methods Appl. Mech. Eng. 362, 112845 (2020). https://doi.org/10.1016/j.cma.2020.112845
dell’Isola, F., Lekszycki, T., Pawlikowski, M., Grygoruk, R., Greco, L.: Designing a light fabric metamaterial being highly macroscopically tough under directional extension: first experimental evidence. Zeitschrift fur Angew. Math. und Phys. 66, 3473–3498 (2015). https://doi.org/10.1007/s00033-015-0556-4
Placidi, L., Barchiesi, E., Turco, E., Rizzi, N.L.: A review on 2D models for the description of pantographic fabrics. Zeitschrift fur Angew. Math. und Phys. 67, 55–57 (2016). https://doi.org/10.1007/s00033-016-0716-1
La Valle, G., Ciallella, A., Falsone, G.: The effect of local random defects on the response of pantographic sheets. Math. Mech. Solids 27, 2147–2169 (2022)
Min, K., Oh, M., Kim, C., Yoo, J.: Topological design of thermal conductors using functionally graded materials. Finite Elem. Anal. Des. 220, 103947 (2023). https://doi.org/10.1016/j.finel.2023.103947
Malikan, M., Eremeyev, V.A.: A new hyperbolic-polynomial higher-order elasticity theory for mechanics of thick FGM beams with imperfection in the material composition. Compos. Struct. 249, 112486 (2020). https://doi.org/10.1016/j.compstruct.2020.112486
Malikan, M., Wiczenbach, T., Eremeyev, V.A.: Thermal buckling of functionally graded piezomagnetic micro- and nanobeams presenting the flexomagnetic effect. Contin. Mech. Thermodyn. 34, 1051–1066 (2022). https://doi.org/10.1007/s00161-021-01038-8
Altenbach, H., Eremeyev, V.A.: On the time-dependent behavior of FGM plates. Key Eng. Mater. 63–70 (2009)
Ghatage, P.S., Kar, V.R., Sudhagar, P.E.: On the numerical modelling and analysis of multi-directional functionally graded composite structures: a review. Compos. Struct. 236, 111837 (2020). https://doi.org/10.1016/j.compstruct.2019.111837
Singh, A.K.: Siddhartha: a novel technique for manufacturing polypropylene based functionally graded materials. Int. Polym. Process. 33, 197–205 (2018). https://doi.org/10.3139/217.3449
Civalek, Ö., Baltacıoglu, A.K.: Free vibration analysis of laminated and FGM composite annular sector plates. Compos. Part B Eng. 157, 182–194 (2019). https://doi.org/10.1016/j.compositesb.2018.08.101
Godlewski, T., Mazur, Ł, Szlachetka, O., Witowski, M., Łukasik, S., Koda, E.: Design of passive building foundations in the polish climatic conditions. Energies (2021). https://doi.org/10.3390/en14237855
Woźniak, C., Wągrowska, M., Szlachetka, O.: Asymptotic modelling and design of some microlayered functionally graded heat conductors. ZAMM Zeitschrift fur Angew. Math. Mech. 92, 841–848 (2012). https://doi.org/10.1002/zamm.201100092
Mazur, Ł, Bać, A., Vaverková, M.D., Winkler, J., Nowysz, A., Koda, E.: Evaluation of the quality of the housing environment using multi-criteria analysis that includes energy efficiency: a review. Energies 15, 1–24 (2022). https://doi.org/10.3390/en15207750
Woźniak, C.: A model for of micro-heterogeneous solid. Mechanik-Berichte, vol. 1 (1999)
Woźniak, C., Wierzbicki, E.: Averaging Techniques in Thermomechanics of Composite Solids. Wydawnictwo Politechniki Częstochowskiej, Częstochowa (2000)
Awrajcewicz, J., Jemielita, G., Kołakowski, Z., Matysiak, S.J., Nagórko, W., Pietraszkiewicz, W., Śniady, P., Świtka, R., Szefer, G., Wągrowska, M., Wilmański, K., Woźniak, C. (eds.): Mathematical Modelling and Analysis Continuum Mechanics of Microstructured Media: Professor Margaret Woźniak pro memoria. Wydawnictwo Politechniki Śląskiej, Gliwice (2010)
Pazera, E., Jędrysiak, J.: Effect of microstructure in thermoelasticity problems of functionally graded laminates. Compos. Struct. 202, 296–303 (2018). https://doi.org/10.1016/j.compstruct.2018.01.082
Jędrysiak, J.: The effect of the material periodic structure on free vibrations of thin plates with different boundary conditions. Materials 15, 1–23 (2022). https://doi.org/10.3390/ma15165623
Tomczyk, B., Gołąbczak, M.: Tolerance and asymptotic modelling of dynamic thermoelasticity problems for thin micro-periodic cylindrical shells. Meccanica 55, 2391–2411 (2020). https://doi.org/10.1007/s11012-020-01184-4
Michalak, B., Woźniak, C., Woźniak, M.: Modelling and analysis of certain functionally graded heat conductors. Arch. Appl. Mech. 77, 823–834 (2007). https://doi.org/10.1007/s00419-007-0128-y
Ostrowski, P., Michalak, B.: The combined asymptotic-tolerance model of heat conduction in a skeletal micro-heterogeneous hollow cylinder. Compos. Struct. 134, 343–352 (2015). https://doi.org/10.1016/j.compstruct.2015.08.071
Wągrowska, M., Szlachetka, O.: Distribution of temperature in multicomponent multilayered composites. Contin. Media Microstruct. 2(15), 199–214 (2016). https://doi.org/10.1007/978-3-319-28241-1_14
Jȩdrysiak, J., Radzikowska, A.: Tolerance averaging of heat conduction in transversally graded laminates. Meccanica 47, 95–107 (2012). https://doi.org/10.1007/s11012-010-9420-y
Pazera, E., Ostrowski, P.: Heat transfer in functionally graded laminate—third type boundary conditions. AIP Conf. Proc. (2020). https://doi.org/10.1063/5.0007794
Pazera, E., Jȩdrysiak, J.: Thermomechanical analysis of functionally graded laminates using tolerance approach. AIP Conf. Proc. (2018). https://doi.org/10.1063/1.5019143
Kubacka, E., Ostrowski, P.: Heat conduction issue in biperiodic composite using Finite Difference Method. Compos. Struct. 261, 113310 (2021). https://doi.org/10.1016/j.compstruct.2020.113310
Kubacka, E., Ostrowski, P.: A finite difference algorithm applied to the averaged equations of the heat conduction issue in biperiodic composites–robin boundary conditions. Materials (2021). https://doi.org/10.3390/ma14216329
Brito-Santana, H., Thiesen, J.L.M., de Medeiros, R., Ferreira, A.J.M., Rodríguez-Ramos, R., Tita, V.: Multiscale analysis for predicting the constitutive tensor effective coefficients of layered composites with micro and macro failures. Appl. Math. Model. 75, 250–266 (2019). https://doi.org/10.1016/j.apm.2019.05.031
Wyczółkowski, R., Bagdasaryan, V., Tomczyk, B.: Modelling of effective thermal conductivity of a packed bed of steel bars with the use of chosen literature models. Compos. Struct. (2022). https://doi.org/10.1016/j.compstruct.2021.115025
Kula, D., Wierzbicki, E.: Surface localized heat transfer in periodic composites. Acta Mech. Autom. 13, 124–129 (2019). https://doi.org/10.2478/ama-2019-0017
Woźniak, C.: On elastodynamics of a functionally graded thick layer. In: Conference Mechanika Ośrodków Niejednorodnych. , Zielona Góra – Łagów (2013)
Woźniak, C.: Macroscopic models of the heat conduction in periodically stratified multicomponent composites (1D- models). In: 6th sympozjon Kompozyty. Konstrukcje Warstwowe. , Wrocław-Srebrna Góra (2012)
Wągrowska, M., Woźniak, C.: A new 2d-model of the heat conduction in multilayered medium-thickness plates. Acta Sci. Pol. Archit. 13, 37–44 (2014)
Wągrowska, M., Szlachetka, O.: Distribution of temperature in multicomponent multilayered composites. Acta Sci. Pol. Archit. 15, 27–39 (2016)
Bagdasaryan, V., Wągrowska, M., Szlachetka, O.: Displacements caused by the temperature in multicomponent, multi-layered periodic material structures. Mech. Mech. Eng. 22, 809–819 (2018). https://doi.org/10.2478/mme-2018-0063
Wągrowska, M., Szlachetka, O., Bagdasaryan, V.: Elastostatic problems in multicomponent, multilayered periodic composites. Przegląd Nauk. Inżynieria i Kształtowanie Środowiska. 27, 9–18 (2018). https://doi.org/10.22630/PNIKS.2018.27.1.2
Mostefa, A.H., Merdaci, S., Mahmoudi, N.: Proceedings of the Third International Symposium on Materials and Sustainable Development. Springer, Berlin (2018)
Giorgio, I.: A variational formulation for one-dimensional linear thermoviscoelasticity. Math. Mech. Complex Syst. 9, 397–412 (2022)
Woźniak, C., Wągrowska, M., Szlachetka, O.: On the tolerance modelling of heat conduction in functionally graded laminated media. J. Appl. Mech. Tech. Phys. 56, 274–281 (2015). https://doi.org/10.1134/S0021894415020133
Woźniak, C.: Tolerance and fuzziness in problems of mechanics. Arch. Mech. 35, 567–578 (1983)
Zeeman, E.: The topology of the brain and the visual perception. In: Fort, K. (ed.) Topology of 3-Manifolds and Selected Topics, pp. 240–256. Prentice Hall, New Jerse (1965)
Nagórko, W., Woźniak, C.: Mathematical modelling of heat conduction in certain functionally graded composites. Pamm. 11, 253–254 (2011). https://doi.org/10.1002/pamm.201110118
Woźniak, C.Z., Wierzbicki, E., Woźniak, M.: A macroscopic model for the heat propagation in the microperiodic composite solids. J. Therm. Stress. 25, 283–293 (2002). https://doi.org/10.1080/014957302317262314
Woźniak, C., Wierzbicki, E., Woźniak, M.: Tolerance averaging and boundary-layer equations for the heat transfer problems in micro-periodic solids. J. Theor. Appl. Mech. 2, 423–442 (2001)
Kubacka, E.: Effect of fluctuation shape functions on vibrations of laminated structures. Vib. Phys. Syst. 31, 1–8 (2020)
Szlachetka, O., Wągrowska, M.: Heat conduction in multicomponent multilayer composites (in Polish). Mater. Kompoz. 27–29 (2015)
Szlachetka, O., Wągrowska, M.: Distribution of temperature in multicomponent multilayered composite with transversal gradation of effective properties (in polish). J. Civ. Eng. Environ. Archit. 66, 61–68 (2016)
Ostrowski, P., Jędrysiak, J.: Dependence of temperature fluctuations on randomized material properties in two-component periodic laminate. Compos. Struct. 257, 113171 (2020). https://doi.org/10.1016/j.compstruct.2020.113171
Jurczak, T.: Modelowanie tolerancyjne przewodzenia ciepla w materialach periodycznie niejednorodnych. Acta Sci. Pol. Archit. 13, 15–28 (2014)
Szlachetka, O., Bagdasaryan, V., Wągrowska, M., Dohojda, M.: The theoretical and experimental analysis of temperature distribution in multi-layered structure.РЕСУРСОЕКОНОМНI МАТЕРIАЛИ, КОНСТРУКЦIÏ, БУДIВЛI ТА СПОРУДИ. 36, 321–328 (2018)
Acknowledgements
We want to thank Professor Monika Wągrowska and Professor Wiesław Nagórko for their discussions on tolerance modelling of multi-component structures, which years later resulted in the writing of this article.
Funding
Open access funding provided by Università degli Studi dell’Aquila within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Szlachetka, O., Giorgio, I. Heat conduction in multi-component step-wise FGMs. Continuum Mech. Thermodyn. (2024). https://doi.org/10.1007/s00161-024-01296-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00161-024-01296-2