
Abstract
Worldwide growth in high-speed rail (HSR) networks has brought a demand for improved structural performance of the bridges that make up a large portion of many of these HSR systems. While some improvement has been made via optimization either of the bridge or the passenger cars, the design criteria of passenger comfort has yet to be addressed in bridge optimization. The transient dynamics of vehicle–bridge interaction between a high-speed train and bridge make such structural optimization of these systems challenging. In this paper, we derive an approach for topology optimization of high-speed rail bridges including vehicle–bridge interaction that enables direct consideration of the passenger comfort in the objective function. Assuming constant contact between the vehicle’s wheels and the bridge, the two systems are combined into a single-state space system. The resulting system matrices are time dependent, as they are a function of the wheel contact locations which change as the vehicles move over the bridge. The equations of motion and the adjoint sensitivities are derived and solved numerically in the time domain. Several numerical examples are provided based on high-speed rail applications that minimize a multi-objective function comprised of bridge and vehicle responses, including passenger comfort. These examples generate topologies that improve passenger comfort at only a small cost to the bridge response and demonstrate the dependence of optimal topology on train speed and length. The proposed method offers the potential for improving high-speed rail passenger comfort through optimization of bridge topology by accounting for the vehicle–bridge interaction effects.













Similar content being viewed by others

References
Araz O, Kahya V (2022) Optimization of multiple tuned mass dampers for a two-span continuous railway bridge via differential evolution algorithm. Structures 39:29–38. https://doi.org/10.1016/J.ISTRUC.2022.03.021
Arvidsson T, Karoumi R (2014) Train–bridge interaction—a review and discussion of key model parameters. Int J Rail Transp 2:147–186. https://doi.org/10.1080/23248378.2014.897790
Beghini A, Beghini LL, Baker WF (2014) On the layout of a least weight single span structure with uniform load. Struct Multidisc Optim 50:49–64. https://doi.org/10.1007/s00158-013-1030-6
Behrou R, Guest JK (2017) Topology optimization for transient response of structures subjected to dynamic loads. In: 18th AIAA/ISSMO multidisciplinary analysis and optimization conference, 2017
Bendsøe MPM, Sigmund O (2004) Topology optimization: theory, methods, and applications. Springer, Berlin
Choi KK, Kim NH (2005) Structural sensitivity analysis and optimization 1. Springer, New York
Craig RR, Kurdila AJ (2011) Fundamentals of structural dynamics. Wiley, Hoboken
Deaton JD, Grandhi RV (2014) A survey of structural and multidisciplinary continuum topology optimization: post 2000. Struct Multidisc Optim 49:1–38. https://doi.org/10.1007/s00158-013-0956-z
Frýba L (1972) Vibration of solids and structures under moving loads. Springer, Dordrecht
Frýba L (1996) Dynamics of railway bridges. Thomas Telford Publishing, London
Garg VK, Dukkipati RV (1984) Dynamics of railway vehicle systems. Academic, New York
Giraldo-Londoño O, Paulino GH (2021) PolyDyna: a MATLAB implementation for topology optimization of structures subjected to dynamic loads. Struct Multidisc Optim 2021:1–34. https://doi.org/10.1007/S00158-021-02859-6
Golecki T, Gomez F, Carrion J, Spencer BFJ (2023) Bridge topology optimization considering stochastic moving traffic. Eng Struct. https://doi.org/10.1016/j.engstruct.2023.116498
Gomez F, Spencer BF (2019) Topology optimization framework for structures subjected to stationary stochastic dynamic loads. Struct Multidisc Optim 59:813–833. https://doi.org/10.1007/s00158-018-2103-3
Gufler V, Wehrle E, Zwölfer A (2021) A review of flexible multibody dynamics for gradient-based design optimization. Multibody Syst Dyn 53:379–409
Haug EJ, Choi KK, Komkov V (1986) Design sensitivity analysis of structural systems. Academic, New York
He X, Wu T, Zou Y, Chen YF, Guo H, Yu Z (2017) Recent developments of high-speed railway bridges in China. Struct Infrastruct Eng 13:1584–1595. https://doi.org/10.1080/15732479.2017.1304429
Hemp WS (1974) Michell framework for uniform load between fixed supports. Eng Optim 1:61–69. https://doi.org/10.1080/03052157408960577
Jensen JS, Nakshatrala PB, Tortorelli DA (2014) On the consistency of adjoint sensitivity analysis for structural optimization of linear dynamic problems. Struct Multidisc Optim 49:831–837. https://doi.org/10.1007/S00158-013-1024-4
Jo BW, Tae GH, Lee DW (2001) Structural vibration of tuned mass damper-installed three-span steel box bridge. Int J Press Vessel Pip 78:667–675. https://doi.org/10.1016/S0308-0161(01)00081-3
Kang BS, Park GJ, Arora JS (2006) A review of optimization of structures subjected to transient loads. Struct Multidisc Optim 312(31):81–95. https://doi.org/10.1007/S00158-005-0575-4
Kim RE, Moreu F, Spencer BF (2016) Hybrid model for railroad bridge dynamics. J Struct Eng 142:04016066. https://doi.org/10.1061/(ASCE)ST.1943-541X.0001530
Kim NH, Dong T, Weinberg D, Dalidd J (2021) Generalized optimality criteria method for topology optimization. Appl Sci. https://doi.org/10.3390/app11073175
Liu H, Zhang W, Gao T (2015) A comparative study of dynamic analysis methods for structural topology optimization under harmonic force excitations. Struct Multidisc Optim 51:1321–1333. https://doi.org/10.1007/S00158-014-1218-4
Luu M, Zabel V, Könke C (2012) An optimization method of multi-resonant response of high-speed train bridges using TMDs. Finite Elem Anal Des 53:13–23. https://doi.org/10.1016/J.FINEL.2011.12.003
Nielsen JCO, Abrahamsson TJS (1992) Coupling of physical and modal components for analysis of moving non-linear dynamic systems on general beam structures. Int J Numer Methods Eng 33:1843–1859. https://doi.org/10.1002/NME.1620330906
Niu B, He X, Shan Y, Yang R (2018) On objective functions of minimizing the vibration response of continuum structures subjected to external harmonic excitation. Struct Multidisc Optim 57:2291–2307. https://doi.org/10.1007/S00158-017-1859-1/
Pring B, Ruiz-Teran AM (2020) Modelling traffic action in high-speed railway bridges. Proc Inst Civ Eng Bridge Eng 173:123–142. https://doi.org/10.1680/jbren.19.00033
Shampine LF, Reichelt MW (1997) The MATLAB ODE Suite. SIAM J Sci Comput 18:1–22. https://doi.org/10.1137/S1064827594276424
Sigmund O (2007) Morphology-based black and white filters for topology optimization. Struct Multidisc Optim 33:401–424. https://doi.org/10.1007/s00158-006-0087-x
Sigmund O, Maute K (2013) Topology optimization approaches: a comparative review. Springer, Berlin
Siringoringo DM, Fujino Y (2012) Estimating bridge fundamental frequency from vibration response of instrumented passing vehicle: analytical and experimental study. Adv Struct Eng 15:417–433. https://doi.org/10.1260/1369-4332.15.3.417
Su M, Dai G, Marx S, Liu W, Zhang S (2018) A brief review of developments and challenges for high-speed rail bridges in China and Germany. Struct Eng Int 29:160–166. https://doi.org/10.1080/10168664.2018.1456892
Táuler Á, Martín S, Benito M (2022) High-speed rail atlas. Geography and Railway Traffic Research Group Fundación de los Ferrocarriles Españoles (FFE), International Union of Railways
van Keulen F, Haftka RT, Kim NH (2005) Review of options for structural design sensitivity analysis. Part 1: linear systems. Comput Methods Appl Mech Eng 194:3213–3243. https://doi.org/10.1016/J.CMA.2005.02.002
Venini P (2016) Dynamic compliance optimization: time vs frequency domain strategies. Comput Struct 177:12–22. https://doi.org/10.1016/J.COMPSTRUC.2016.07.012
Wang C, Zhao Z, Zhou M, Sigmund O, Zhang XS (2021) A comprehensive review of educational articles on structural and multidisciplinary optimization. Struct Multidisc Optim 64:2827–2880. https://doi.org/10.1007/S00158-021-03050-7
Wu YS, Yang YB (2003) Steady-state response and riding comfort of trains moving over a series of simply supported bridges. Eng Struct 25:251–265. https://doi.org/10.1016/S0141-0296(02)00147-5
Xia H, Zhang N, Guo W (2018) Dynamic interaction of train–bridge systems in high-speed railways: theory and applications. Springer, Berlin
Xu WT, Zhang YH, Lin JH, Kennedy D, Williams FW (2011) Sensitivity analysis and optimization of vehicle–bridge systems based on combined PEM-PIM strategy. Comput Struct 89:339–345. https://doi.org/10.1016/J.COMPSTRUC.2010.11.011
Yang Y-B, Yao Z, Wu YS (2004) Vehicle–bridge interaction dynamics: with applications to high-speed railways. World Scientific, River Edge, p 530
Yang Y, Zhu M, Shields MD, Guest JK (2017) Topology optimization of continuum structures subjected to filtered white noise stochastic excitations. Comput Methods Appl Mech Eng 324:438–456. https://doi.org/10.1016/j.cma.2017.06.015
Yau JD, Bin YY, Kuo SR (1999) Impact response of high speed rail bridges and riding comfort of rail cars. Eng Struct 21:836–844. https://doi.org/10.1016/S0141-0296(98)00037-6
Zargham S, Ward TA, Ramli R, Badruddin IA (2016) Topology optimization: a review for structural designs under vibration problems. Struct Multidisc Optim 53:1157–1177. https://doi.org/10.1007/S00158-015-1370-5
Zhai W, Xia H, Cai C, Gao M, Li X, Guo X, Zhang N, Wang K (2013) High-speed train–track–bridge dynamic interactions—Part I: theoretical model and numerical simulation. Int J Rail Transp 1:3–24. https://doi.org/10.1080/23248378.2013.791498
Zhai W, Han Z, Chen Z, Ling L, Zhu S (2019) Train–track–bridge dynamic interaction: a state-of-the-art review. Int J Veh Mech Mobil 57:984–1027. https://doi.org/10.1080/00423114.2019.1605085
Zhang N, Xia H, Guo W, Zhan J, Yao J, Cao Y (2010) Vehicle–bridge interaction analysis of heavy load railway. Procedia Eng 4:347–354. https://doi.org/10.1016/J.PROENG.2010.08.040
Zhao J, Wang C (2016) Dynamic response topology optimization in the time domain using model reduction method. Struct Multidisc Optim 53:101–114. https://doi.org/10.1007/S00158-015-1328-7
Acknowledgements
This work made use of the Illinois Campus Cluster, a computing resource that is operated by the Illinois Campus Cluster Program (ICCP) in conjunction with the National Center for Supercomputing Applications (NCSA) and which is supported by funds from the University of Illinois at Urbana-Champaign.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflicts of interest.
Replication of results
The information required to replicate the results contained herein has been provided in this manuscript. Should additional information be required, please contact the authors directly.
Additional information
Responsible Editor: Gang Li
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
(MP4 1648 kb)
Appendix A: Nomenclature
Appendix A: Nomenclature
State space system variables | |
|---|---|
\({\mathbf{A}}_{\bullet }\) | System matrix |
\({\mathbf{B}}_{\bullet }\) | Input matrix |
\({\mathbf{C}}_{\bullet }\) | Output matrix |
\({\mathbf{D}}_{\bullet }\) | Feedthrough matrix |
\({\mathbf{x}}_{\bullet }\) | State vector |
\({\mathbf{y}}_{\bullet }\) | Output vector |
\({\mathbf{A}}_{\mathrm{a}}, {\mathbf{B}}_{\mathrm{a}}, {\mathbf{C}}_{\mathrm{a}}, {\mathbf{D}}_{\mathrm{a}},{{\varvec{x}}}_{\mathrm{a}},{{\varvec{y}}}_{\mathrm{a}}\) | State space system variables of the augmented system |
\({\mathbf{A}}_{\mathrm{f}}, {\mathbf{B}}_{\mathrm{f}}, {\mathbf{C}}_{\mathrm{f}}, {\mathbf{D}}_{\mathrm{f}},{{\varvec{x}}}_{\mathrm{f}},{{\varvec{y}}}_{\mathrm{f}}\) | State space system variables of the filter system |
\({\mathbf{A}}_{\mathrm{vb}}, {\mathbf{B}}_{\mathrm{vb}}, {\mathbf{C}}_{\mathrm{vb}}, {\mathbf{D}}_{\mathrm{vb}},{{\varvec{x}}}_{\mathrm{vb}},{{\varvec{y}}}_{\mathrm{vb}}\) | State space system variables of the vehicle–bridge system |
Structural system variables | |
|---|---|
\({\mathbf{M}}_{\mathrm{b}},{\mathbf{C}}_{\mathrm{b}}, {\mathbf{K}}_{\mathrm{b}}\) | Mass, damping, and stiffness matrices of the bridge |
\({ \widetilde{\mathbf{M}}}_{\mathrm{b}}, {\widetilde{\mathbf{C}}}_{\mathrm{b}}, {\widetilde{\mathbf{K}}}_{\mathrm{b}}\) | Guyan reduced mass, damping, and stiffness matrices of the bridge |
\({{\mathbf{M}}_{\mathrm{vb}},\mathbf{C}}_{\mathrm{vb}},\boldsymbol{ }{\mathbf{K}}_{\mathrm{vb}},\boldsymbol{ }{\mathbf{G}}_{\mathrm{vb}}\) | Mass, damping, stiffness, and load effect matrices of the vehicle–bridge system |
\(\left[\begin{array}{cc}{{\varvec{m}}}_{\mathrm{uu}}& {{\varvec{m}}}_{\mathrm{uw}}\\ {{\varvec{m}}}_{\mathrm{wu}}& {{\varvec{m}}}_{\mathrm{ww}}\end{array}\right]\) | Partitioned mass matrix of the vehicle(s) |
\(\left[\begin{array}{cc}{{\varvec{c}}}_{\mathrm{uu}}& {{\varvec{c}}}_{\mathrm{uw}}\\ {{\varvec{c}}}_{\mathrm{wu}}& {{\varvec{c}}}_{\mathrm{ww}}\end{array}\right]\) | Partitioned damping matrix of the vehicle(s) |
\(\left[\begin{array}{cc}{{\varvec{k}}}_{\mathrm{uu}}& {{\varvec{k}}}_{\mathrm{uw}}\\ {{\varvec{k}}}_{\mathrm{wu}}& {{\varvec{k}}}_{\mathrm{ww}}\end{array}\right]\) | Partitioned stiffness matrix of the vehicle(s) |
Other variables | |
|---|---|
\(E(z)\) | Penalized elastic modulus |
\({E}_{0}\) | Elastic modulus of full density material |
\(g\) | Gravitational constant |
\(\mathbf{I}\) | Identity matrix |
\(J\) | Objective function |
\({ J}_{\mathrm{c}}\) | Objective function combining bridge displacement and passenger comfort |
\({ J}_{\mathrm{pc}}\) | Passenger comfort objective function |
\({ K}_{\mathrm{p}}, {C}_{\mathrm{p}}\) | Stiffness and damping of vehicle primary suspension system defined in Table 2 |
\({ K}_{\mathrm{s}}, {C}_{\mathrm{s}}\) | Stiffness and damping of vehicle secondary suspension system defined in Table 2 |
\(\mathcal{L}\) | Lagrangian form of objective function |
\({ L}_{\mathrm{c}}\) | Distance from vehicle body c.g. to bogie c.g. defined in Table 2 |
\({ L}_{\mathrm{t}}\) | Distance from bogie c.g. to wheel defined in Table 2 |
\({l}_{n}\) | Indicator of whether the \(n\) th car is on the span |
\({ n}_{\mathrm{r}}\) | Number of retained DOF in Guyan reduction |
\({ M}_{\mathrm{c}}, {I}_{\mathrm{c}}\) | Mass and inertia of the car body defined in Table 2 |
\({ M}_{\mathrm{t}}, {I}_{\mathrm{t}}\) | Mass and inertia of the bogie defined in Table 2 |
\({ M}_{\mathrm{w}}\) | Mass of a car wheel defined in Table 2 |
\({ N}_{\mathrm{el}}\) | Number of elements in the bridge model |
\({\boldsymbol{ }{\varvec{N}}}_{\mathrm{vi}}\) | Function to interpolate contact location displacements from the bridge displacements |
\(p\) | Stiffness penalty |
\(q\) | Mass penalty |
\(\mathrm{ SCI}\) | Sperling’s Comfort Index |
\(T\) | Total simulation time |
\(\mathbf{T}\) | Transformation matrix used in Guyan reduction |
\(t\) | Time |
\({\boldsymbol{ }{\varvec{u}}}_{\mathrm{b}}\) | Bridge DOF |
\({ \widetilde{{\varvec{u}}}}_{\mathrm{b}}\) | DOF in the Guyan reduced bridge model |
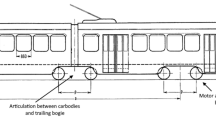
\({\boldsymbol{ }{\varvec{u}}}_{\mathrm{u}}\) | DOF of vehicle upper (non-contact) portion, shown in Fig. 1 |
\({\boldsymbol{ }{\varvec{u}}}_{\mathrm{w}}\) | DOF of vehicle wheels, shown in Fig. 1 |
\(V\left({\varvec{z}}\right)\) | Material volume used in the design |
\({ V}_{\mathrm{max}}\) | Material volume constraint |
\({\mathrm{v}}_{0}\) | Vehicle velocity |
\({x}_{k}\) | Contact location of the \(k\) th wheel |
\({\boldsymbol{ }{\varvec{y}}}_{\mathrm{bd}}\) | Bridge displacement outputs |
\({\boldsymbol{ }{\varvec{y}}}_{\mathrm{c}}\) | Combined bridge displacement and passenger comfort outputs |
\({{\varvec{y}}}_{\mathrm{m}}\) | Vector of passenger comfort outputs for multiple train cars |
\({ y}_{\mathrm{pc}}\) | Passenger comfort output for a single car |
\(\boldsymbol{ }{\varvec{z}}\) | Vector of element densities |
\({z}_{\mathrm{min}}, {z}_{\mathrm{max}}\) | Bounds of element densities |
\({ \alpha }_{1}, {\alpha }_{2}\) | Weight factors for passenger comfort and bridge displacement portions of the combined objective |
\({\varvec{\Lambda}}\) | Adjoint variable to compute sensitivities |
\(\boldsymbol{ }{\varvec{\lambda}}\) | Adjoint variable to compute sensitivities |
\(\rho (z)\) | Penalized mass density |
\({ \rho }_{0}\) | Mass density of solid material |
\(\psi \left({\varvec{y}}(t,{\varvec{z}})\right)\) | Time domain function of system responses |
\({ \psi }_{\mathrm{bd}}\) | Bridge displacement responses |
\({ \psi }_{\mathrm{c}}\) | Combined bridge displacement and passenger comfort responses |
\({\psi }_{\mathrm{m}}\) | Combined passenger comfort responses from multiple train cars |
\({\psi }_{\mathrm{pc}}\) | Passenger comfort response from a single train car |
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Golecki, T., Gomez, F., Carrion, J. et al. Topology optimization of high-speed rail bridges considering passenger comfort. Struct Multidisc Optim 66, 215 (2023). https://doi.org/10.1007/s00158-023-03666-x
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00158-023-03666-x