
Abstract
In this paper, we generalize a method introduced by Christodoulou for studying the Einstein-scalar field to prove a trapped surface formation criterion for the Einstein–Maxwell-charged scalar field system under spherical symmetry. If we further require the initial charge to be sufficiently small, we obtain an almost-scale-critical result in the perturbative regime. In the “Appendix”, we also include a proof of Christodoulou’s result on trapped surface formation for the Einstein-scalar field using double null coordinates, as well as a strengthed scale-critical criterion in the case of Minkowskian incoming characteristic initial data.



Similar content being viewed by others

Notes
A trapped surface is a two-dimensional sphere, with both incoming and outgoing null expansions negative.
This definition for r implies that \(g|_S = r^2(\mathrm{d}\theta ^2+sin^2\theta \mathrm{d}\phi ^2)\)
References
An, X., Luk, J.: Trapped surfaces in vacuum arising dynamically from mild incoming radiation. Adv. Theor. Math. Phys. 21(1), 1–120 (2017)
An, X.: A scale-critical trapped surface formation criterion: a new proof via signature for decay rates. Ann. PDE 8(3), 89 (2022)
Andréasson, H.: Black hole formation from a complete regular past for collisionless matter. Ann. Henri Poincaré 13, 1511–1536 (2012)
Andréasson, H., Rein, G.: Formation of trapped surfaces for the spherically symmetric Einstein–Vlasov system. J. Hyperbolic Differ. Equ. 7, 707–731 (2010)
Burtscher, A., LeFloch, P.: The formation of trapped surfaces in spherically-symmetric Einstein–Euler spacetimes with bounded variation. J. Math. Pures Appl. 102, 1164–1217 (2014)
Christodoulou, D.: The formation of black holes and singularities in spherically symmetric gravitational collapse. Commun. Pure Appl. Math. 44(3), 339–373 (1991)
Christodoulou, D.: Bounded variation solutions of the spherically symmetric Einstein-scalar field equations. Commun. Pure Appl. Math. 46(8), 1131–1220 (1993)
Christodoulou, D.: Examples of naked singularity formation in the gravitational collapse of a scalar field. Ann. Math. 140(3), 607–653 (1994)
Christodoulou, D.: The instability of naked singularities in the gravitational collapse of a scalar field. Ann. Math. 149(1), 183–217 (1999)
Dafermos, M.: Stability and instability of the Cauchy horizon for the spherically symmetric EinsteinMaxwell-scalar field equations. Ann. Math. 158, 875–928 (2003)
Dafermos, M.: The interior of charged black holes and the problem of uniqueness in general relativity. Commun. Pure Appl. Math. 58, 0445–0504 (2005)
Komemmi, J.: The global structure of spherically symmetric charged scalar field spacetimes. Commun. Math. Phys. 323(1), 35–106 (2013)
Liu, J., Li, J.: A robust proof of the instability of naked singularities of a scalar field in spherical symmetry. Commun. Math. Phys. 363(2), 561–578 (2018)
Luk, J., Oh, S.-J.: Strong cosmic censorship in spherical symmetry for two-ended asymptotically flat initial data I, the interior of the black hole region. Ann. Math. 190, 1–111 (2019)
Moschidis, G.: A proof of the instability of AdS for the Einstein-massless Vlasov system. arXiv:1812.04268 (2018)
Moschidis, G.: A proof of the instability of AdS for the Einstein-null dust system with an inner mirror, Analysis & PDE (to appear). arXiv:1704.08681 (2017)
Van de Moortel, M.: Stability and instability of the sub-extremal Reissner-Nordström black hole interior for the Einstein-Maxwell-Klein-Gordon equations in spherical symmetry. Commun. Math. Phys. 360, 103 (2018)
Acknowledgements
XA is supported by the MOE startup grant under Project Number R-146-000-269-133. ZFL conducted this research during his final year project at NUS supervised by XA.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Mihalis Dafermos.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Trapped Surface Formation for the Einstein Scalar Field
Here, we provide a proof of Christodolou’s sharp trapped surface formation criterion as in [6]. In the case for the real scalar field, the system of Eqs. (2.4) to (2.12) is reduced to
Also, the derivatives of the Hawking mass become:
For convenience, we restate theorem 1.1 here.
Theorem 1.1. Define the function
Consider the system (1.1) with characteristic initial data along \(u=u_0\) and \(v=v_1\). For initial mass input \(\eta _0\) along \(u=u_0\), if the following lower bound holds:
then a trapped surface \(S_{u,v}\), with properties \(\partial _v r(u,v)<0\) and \(\partial _u r(u,v)< 0\), forms in the region \([u_0,u_*]\times [v_1,v_2]\subset \mathcal {R}\).
In this section, we will first give a few technical estimates to the dynamical quantities in the strip \([u_0,0]\times [v_1,v_2]\). These will be used in the proof for Theorem 1.1. We start off by showing that \(\partial _ur\) is negative and bounded away from 0.
Lemma 4.1
\(\partial _ur\le -\frac{1}{2}\Omega ^2\) everywhere in \(\mathcal {D}(0,v_1)\cup \big ([u_0,0]\times [v_1,\infty )\big )\)
Proof
Rewrite (4.1) as
Note that \(\Omega ^2=1\) along C. Integrating both sides from 0 to v and dividing by r:
Setting \(v = 0 \) in the above gives us
Since \(\Omega ^2 = 1\) on C as well, (4.3) gives us that \(\partial _v\partial _vr\le 0\), i.e., r is concave with respect to v. Combining this with the fact that \(r(u_0,0) = v(u_0,0) = 0\), we have:
Hence,
Substitute this into (4.7), we get
By (4.3), \(\Omega ^{-2}\partial _ur\) is decreasing along incoming null geodesics. Hence for a general point in \(\mathcal {D}(0,v_1)\cup \big ([u_0,0]\times [v_1,\infty )\big )\), we have \(\Omega ^{-2}\partial _ur\le -\frac{1}{2}\). \(\square \)
Remark 4.2
\(m(u,v)\ge 0\) for all \((u,v)\in \mathcal {D}(0,v_1)\cup \big ([u_0,0]\times [v_1,\infty )\big )\)
Proof
Given any point \((u,v)\in \mathcal {R}\), we can extend the outgoing null geodesic backwards until it intersects \(\Gamma \) at some coordinate \((u,v_c)\), so that \(r(u,v_c) = 0\). Using (4.6), we have
and since \(\partial _ur\le 0\) by Lemma 4.1, we get that \(\partial _vm\ge 0\). Combining with the fact that \(m(u,v_c) = 0\), we obtain the desired result. \(\square \)
Next, we show that the mixed derivative of r is always negative. This places a upper bound on the growth on the ratio \(\frac{r_2}{r_1}\).
Proposition 4.3
Assume that \(\mathcal {D}(0,v_1)\cup \mathcal {R}\) is free of trapped surfaces. Then, i) \(\partial _u\partial _vr \le 0\) in \(\mathcal {R}\) and ii) \(\delta (x):=\frac{r_2}{r_1}-1\le \frac{1}{2}\) for \(u\in [u_0,u_*]\).
Proof
We rewrite (4.1) into the following equivalent form:
Since \(m\ge 0\), the right side of the above equation is non-positive. This proves the first part of the lemma.
Integrating with respect to u, we get:
Integrating the above inequality with respect to v,
Hence, we can use the above inequality to compute a bound for \(\delta (u)\):
where \(x(u):=r_2(u)/r_2(u_0)\). Recall \(r_2(u_*):=\frac{3\delta _0}{1+\delta _0}\cdot r_2(u_0)\) and since x(u) is monotonically decreasing, we have
and hence
\(\square \)
Next we prove two key lemmas. In the first one, we bound the difference in \(r\partial _u\phi \) between \(v=v_1\) and \(v=v_2\). Then in the second, we bound the ratio of \(\partial _vr\) between \(v=v_1\) and \(v=v_2\).
Lemma 4.4
Define \(\Theta :=r_2\partial _u\phi _2-r_1\partial _u\phi _1\). Suppose that \(\mathcal {D}(0,v_1)\cup \mathcal {R}\) is free of trapped surfaces. Then,
for all \(u\in [u_0,u_*]\).
Proof
We can write the wave Eq. (4.4) as
By integrating the above equation, we get
where we have applied Holder’s inequality for the last inequality.
The first integral can be written in terms of the hawking mass:
To bound the second integral, we apply Proposition 4.3 to get \(\partial _v\partial _ur\le 0\), and hence \(\partial _ur\ge \partial _ur_2\). Also, Eq. (4.3) implies that \(\Omega _2^{-2}\partial _vr_2\le \Omega ^{-2}\partial _vr\). Combining these two pieces of information, we have
Substituting (4.12) and (4.13) back into (4.11) gives us the desired result. \(\square \)
Lemma 4.5
Assume that \(\mathcal {D}(0,v_1)\cup \mathcal {R}\) is free of trapped surfaces. Then
for all \(u\in [u_0,u_*]\).
Proof
Dividing both sides of Eq. (4.3) by \(\Omega ^{-2}\partial _vr\) and integrating from \(v_1\) to \(v_2\), we get
By Eq. (4.6) and the definition of the Hawking mass, we have
Hence for any \(u\in [u_0,u_*]\)
Exponentiating both sides of the above inequality gives us the desired result. \(\square \)
Now we are ready to prove Theorem 1.1.
Proof
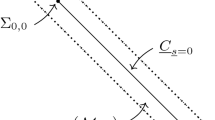
(Theorem 1.1) We consider the dimensionless length scale \(x(u):=\frac{r_2(u)}{r_2(u_0)}\). Note that x decreases as u increases and \(x(u_0) = 1\). We will show that \(\frac{\mathrm{d}\eta }{\mathrm{d}x}\) is bounded from above, i.e., \(\frac{\mathrm{d}\eta }{\mathrm{d}u}\) is bounded from below, and hence obtain a lower bound for \(\eta (u_*)\). If this lower bound is greater than 1, this implies \(S(u_*,v_2)\) is a trapped surface, for
See Fig. 4 for an illustration.

Idea of Proof of Theorem 1.1
To be precise, we prove a Gronwall-like inequality under the assumption that there is no trapped surface formed before \(u_*\). In particular, we assume that \(\partial _vr_2(u)>0\) for all \(u\in [u_0,u_*]\). We show that this assumption will lead to a contradiction.
Assuming that \(\partial _vr_2(u)>0\) for all \(u\in [u_0,u_*]\), the following chain of identities hold in the region \([u_0,u_*]\times [v_1,v_2]\):
Using Lemma 4.5, we can bound the factor in the second term:
The last expression, being a quadratic in \(\Theta \), can be bounded by a monic quadratic polynomial in \(\Theta \):
since \(\eta \ge 0\). This last inequality combines with (4.14) to give:
Applying Lemma 4.4, we have
Using (4.10), we get
Combining the above with (4.15), we obtain
Defining \(g(x):=1-\frac{\delta _0}{x(1+\delta _0)-\delta _0}\) and \(f(x):=\frac{\delta _0}{x(1+\delta _0)-\delta _0}\), we obtain the following differential inequality:
To solve this differential inequality, we multiply by an integrating factor then integrate with respect to x:
We denote \(G(x):= \int _x^1\frac{g(s)}{s}ds\) and \(F(x):=\int _x^1e^{-G(x')}\frac{f}{x'}\mathrm{d}x'\). In this notation, we get
Hence, in the region \([u_0,u_*]\times [v_1,v_2]\) free of trapped surfaces, we conclude that the following inequality holds:
Now, we compute explicit expressions for G(x) and F(x):
Using the assumption that there is no trapped surface or MOTS, we have \(\eta (x)=\frac{2(m_2-m_1)}{r_2}\le \frac{2m_2}{r_2}<1\) for \(x\in [\frac{3\delta _0}{1+\delta _0},1]\). Rearranging (4.16) results in
In particular, we can substitute \(x = \frac{3\delta _0}{1+\delta _0}\) into the above equation and get
This gives us the desired contradiction. \(\square \)
1.2 A Special Case of Minkowskian Incoming Characteristic Initial Data
Prescribe Minkowskian data along \(v=v_1\), we can improve the lower bound required on \(\eta _0\) in Theorem 1.1.
Theorem 1.2. Assume that Minkowskian data are prescribed along \(v=v_1\) and require \(\phi (u,v_1)=0\). Suppose that the following lower bound on \(\eta _0\) holds:
then there exist a MOTS or a trapped surface in \([u_0,u_*]\times [v_1,v_2]\subset \mathcal {R}\), i.e., \(\partial _vr\le 0\) at some point in \([u_0,u_*]\times [v_1,v_2]\).
Proof
(Theorem 1.3) In this special case, we have \(\phi _1\equiv 0\) and \(m_1 \equiv 0\). Equation (4.14) now reads:
and we also have
Combining the above equations, followed by applying Lemma 4.4, we get:
Integrating the above inequality:
Under the assumption of no trapped surfaces or MOTS, we have \(\eta (x)<1\) for all \(x\in [\frac{3\delta _0}{1+\delta _0},1]\), hence
In particular, choosing \(x=\frac{3\delta _0}{1+\delta _0}\) we have
This gives us the desired contradiction to the hypothesis. \(\square \)
Rights and permissions
About this article

Cite this article
An, X., Lim, Z.F. Trapped Surface Formation for Spherically Symmetric Einstein–Maxwell-Charged Scalar Field System with Double Null Foliation. Ann. Henri Poincaré 23, 3159–3190 (2022). https://doi.org/10.1007/s00023-022-01168-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00023-022-01168-y