
Abstract
This paper is about to formulate a design of predator–prey model with constant and time fractional variable order. The predator and prey act as agents in an ecosystem in this simulation. We focus on a time fractional order Atangana–Baleanu operator in the sense of Liouville–Caputo. Due to the nonlocality of the method, the predator–prey model is generated by using another FO derivative developed as a kernel based on the generalized Mittag-Leffler function. Two fractional-order systems are assumed, with and without delay. For the numerical solution of the models, we not only employ the Adams–Bashforth–Moulton method but also explore the existence and uniqueness of these schemes. We use the fixed point theorem which is useful in describing the existence of a new approach with a particular set of solutions. For the illustration, several numerical examples are added to the paper to show the effectiveness of the numerical method.
Similar content being viewed by others


1 Introduction
During the past decades, several mathematical models have been investigated to model prey–predator systems [1–16]. The understanding of the relationship between herbivores and plants is extremely important in the behavior of the ecosystems. Those studies have been implemented in dynamical systems of organic models incorporating integer-order differential equations. However, in these models, the effects of long-range memories are neglected. Recently, mathematical systems with fractional order (FO) have become more worthy than classical systems as FO models provide the description of the memory effects [17–29]. Owolabi et al. in [30] studied local and global stability of the fractional dynamical system of prey–predator with Holling type-II involving a time delay. Javidi and Nyamoradi provided a detailed study of the local stability of the FO predator–prey model [31]. Alkahtani in [32] investigated the FO triadic predator–prey model. This system was produced utilizing the latest FO differentiation related to the function of generalized Mittag-Leffler (GML). In [33], the authors proposed harvesting terms of a FO delayed predator–prey system. The stability of the model was studied and numerical results were presented to verify the theoretical outcomes. In [34], a FO singular predator–prey model with Holling type-II functional response was studied. The authors investigated the local stability and the solvability condition of this model. Numerical simulations were obtained for different values of the order of the FO derivative. Owolabi in [35] analyzed a FO predator–prey model. The Riemann–Liouville operator based on the pseudo-spectral technique was considered.
In this work, we develop a FO predator–prey system with constant and variable-order Atangana–Baleanu FO operator in the Liouville–Caputo sense. We assume the deterministic integer-order predator–prey model analyzed and studied by Li in [36]. Our system assumes a more realistic prey–predator model with two properties with and without time delay. The mathematical model is built using this FO derivative with the generalized Mittag-Leffler law as a kernel caused by nonlocality of the model and broad usability of the GML function. The Mittag-Leffler kernel applied in Atangana–Baleanu FO differentiation ordinarily exists in various physical models as a generalized exponential decay and as power-law asymptotic for a very large time.
The paper is organized as follows: In Sect. 2, the FO model involving Atangana–Baleanu–Caputo (ABC) operators is disputed. Results are displayed in Sect. 3 numerically, and conclusion is given in Sect. 4.
2 Predator–prey model
In this paper, we study the mathematical system proposed by Li in [36] and assume Atangana–Baleanu FO operator with constant and variable order. We aim to manufacture a superior estimate model to the real dynamics of a predator–prey system involving a prey refuge among heterogeneous populations. In this investigation, two FO models are treated. The first one depends on the Atangana–Baleanu–Caputo FO differential equations with constant order. We present the existence of positive solutions for the unique proposed design. We study the uniqueness and existence of the solutions. Furthermore, we consider this model involving FO differential equations of Atangana–Baleanu–Caputo type with variable order. Variable order is fixed as a smooth function to specify time differentiation bounded in (0;1]. To get simulation solutions for the suggested system, we employ the Adams process. Finally, the second one assumes a FO model with time delay; in this scenario, we portray the computative technique focused on the Adams–Bashforth–Moulton method to clarify FO delay differential equations relative to variable order through the Atangana–Baleanu–Caputo FO derivative.
In the first case, the system considered is defined as [36]
with the initial conditions \(\mathbf{x}(\tau _{0})=\mathbf{x}_{\tau {(0)}}\) and \(\mathbf{y}(\tau _{0})=\mathbf{y}_{\tau {(0)}}\). Fractional-order operator used in the proposed model (2.1) is in the ABC sense, \({}^{ABC}_{0}{\mathcal{D}}_{\tau }^{\epsilon }\). FO derivative with constant order is defined as [37]
where the function \(\varrho (\epsilon )\) represents normalization, \(1=\varrho (0)=\varrho (1)\). FO operator is using the Mittag-Leffler rule as a nonsingular and nonlocal kernel, where \(E_{\epsilon }\) is a Mittag-Leffler function of one parameter
The Atangana–Baleanu FO integral of function \(f(\tau )\) with order ϵ is characterized as [37]
System (2.1) can be made more realistic as the prey and the predators should not follow the same FO dynamics. For this reason, we provide two various orders of the fractional-differential derivatives \(\epsilon \in (0,1]\) and \(\varsigma \in (0,1]\).
In our model, \(\mathbf{x}(\tau )\) and \(\mathbf{y}(\tau )\) represent prey and predator populations at time τ, respectively. The environmental carrying capacity of prey and intrinsic growth rate and population are denoted by k and r, respectively; c represents predators attack rate on prey population; e denotes recently conceived predators for each prey catch; d represents the predator mortality rate. This system involves a constant shelter covering \(\mathfrak{M}\mathbf{x}(\tau )\) of the prey such that \(m\in [0,1)\), allowing \((1-\mathfrak{M})\mathbf{x}(\tau )\) of the prey be accessible to the predator [36]. These constants are all positive.
On the other hand, compared with constant FO systems, the research on variable FO differential equations is relatively new, and a numerical approximation of these equations is still at an early stage of development [37–49]. The variable FO operator of Atangana–Baleanu type in the sense of Liouville–Caputo is given as follows:
where the normalized function \(\varrho (\epsilon (\tau ))=1- \epsilon (\tau ) + \frac{\epsilon (\tau )}{\Gamma (\epsilon (\tau ))}\).
A variable FO integral in the sense of Atangana–Baleanu is listed as follows:
System (2.1) with the support of variable FO Atangana–Baleanu–Caputo derivatives produces
In the second case, we consider that the predatory-prey species is not an instantaneous operation; for this case, the model given by Eq. (2.1) is defined as
where the variable FO operator \({}^{ABC}_{0}{\mathcal{D}}\tau ^{\epsilon (\tau )}\) denotes Atangana–Baleanu–Caputo for each operator, and time delay κ represents the gestation delay.
3 Predator–prey model involving constant-order fractional derivative
First case
This portion is to investigate the existence and uniqueness of the solutions under constant order assuming the Atangana–Baleanu–Caputo FO operator.
Existence and uniqueness of the solution
For every real-valued continuous function, let \(\mathbf{y}=\lambda [a^{\circ },a^{\circ }_{1}]\) be the Banach space in \([a^{\circ },a^{\circ }_{1}]\), containing the subnorm and shaft Φ ={\(\mathbf{x},\mathbf{y} \in \mathbf{y}\), \(\mathbf{x}(\tau )>0\) and \(\mathbf{y}(\tau )\geq 0\), \(a^{\circ }\leq \tau \leq a^{\circ }_{1}\)}. Let Ψ be a real Banach space with a cone H. H initiates a restricted order in the succeeding approach [45]
The order interval for each \(u, v \in \Phi \) is specified as \(\langle a^{\circ }, a^{\circ }_{1}\rangle =\{f\in \Psi : a^{\circ }\leq f\leq a^{\circ }_{1} \}\). A cone Π speaks to typical if one can locate a positive constant α with the end goal that \(\mathbf{r}, l, \in \Pi \), \(\Upsilon <\mathbf{r}<l \rightarrow \Vert \mathbf{r} \Vert \leq \alpha \Vert l \Vert \), where ϒ is the zero component of Π.
Theorem 1
Let a Banach space Z have a closed set subspace H and \(T:H\rightarrow H\) with Lipschitz constant \(\upsilon <1\) be a contraction mapping so that T carries a fixed point \(\tau ^{*}\in H\). Furthermore, a sequence \(\{\tau _{\mathfrak{M}}\}\) is interpreted as \(\tau _{\mathfrak{M}+1}=T\tau _{\mathfrak{M}}\) (\(\mathfrak{M}=0,1,2,\ldots \)) for a random point \(\tau _{0}\in H\), then \(\tau _{\mathfrak{M}}\rightarrow \tau ^{*}\) in H for a large number \(\mathfrak{M}\) and \(l(\tau _{\mathfrak{M}},\tau ^{*})\leq (\upsilon ^{\mathfrak{M}}/(1- \upsilon ))l(\tau _{1},\tau _{0})\) [45]. To study the existence of solutions, let us assume the system given by Eq. (2.1).
Model (2.1) is identical to that of Volterra when it is integral in the Atangana–Baleanu sense. We apply the AB fractional integral in Eq. (2.1) to get the system
Now we assume the following lemmas.
Lemma 1
Suppose that \(T:H\rightarrow H\) is a mapping and gives
To handle this more easily, let us assume the following:
Lemma 2
Let \(M \subset H\) be bounded and constants \(\beta , \delta >0\)
Thus, \(\bar{T(M)}\) is compact.
Proof
Let us consider \(\Theta =\max\{((1-\epsilon )/(\varrho (\epsilon )))+S(\tau , \mathbf{x}(\tau ))\}\), \(0\leq \mathbf{x}(\tau )\leq P\). Therefore, for \(\mathbf{x}(\tau ) \in M\), we have
If \(\eta =\max\{((1-\varsigma )/(\varrho (\varsigma )))+S(\tau , \mathbf{x}(\tau ))\}\), \(0\leq \mathbf{y}(\tau )\leq Q\) for \(\mathbf{y}(\tau ) \in M\), then we have
Due to Eqs. (3.6) and (3.7), we assume that T is bounded. Now observe \(\mathbf{x}(\tau ) \in M\), \(\tau _{1}\), \(\tau _{2}\); \(\tau _{1}<\tau _{2}\) and if \(\vert \tau _{2}-\tau _{1} \vert <\mu \) for given \(\phi >0\), hence
Now we assume an integral part
Now we will study the following:
Equation (3.10) by taking the Lipschitz condition of the operator becomes
where \(\varphi =h (1-\frac{A}{k} )-\lambda (1-\mathfrak{M})(B)\).
Now putting Eqs. (3.9)–(3.11) in Eq. (3.8), we get
such that \(\Vert T[\mathbf{x}(\tau _{2})]-T[\mathbf{x}(\tau _{1})] \Vert <\rho \) is satisfied.
Now, for \(\mathbf{y}(\tau )\), we have
Taking the Lipschitz condition of the operator and Eq. (3.13), we consider the following:
where \(\mathbf{x}=e\lambda (1-\mathfrak{M})(A)-d\).
Now we get
Such that \(\Vert T[\mathbf{x}(\tau _{2})]-T[\mathbf{x}(\tau _{1})] \Vert <\epsilon \) and \(\Vert T[\mathbf{y}(\tau _{2})]-T[\mathbf{y}(\tau _{1})] \Vert <\epsilon \) hold. So \(\bar{T(M)}\) is equicontinuous and compact [45] due to the Arzela–Ascoli principle. This completes the proof. □
Theorem 2
Assume that the function \(S:[x_{1},x_{2}]\times [0,\infty )\rightarrow [0,\infty )\) is continuous and \(S(\tau ,\cdot )\) is increasing for each \(\tau \in [x_{1},x_{2}]\). Consider a constant \(\bar{\psi }^{\star }_{1}\) satisfying \(x(s)\bar{\psi }^{\star }_{1} \leq S(\tau ,\bar{\psi }^{\star }_{1})\), \(x(s)\bar{\psi }^{\star }_{2}\geq S(\tau ,\bar{\psi }^{\star }_{2})\), \(0\leq \bar{\psi }^{\star }_{1}(\tau )\leq \bar{\psi }^{\star }_{2}(\tau )\), \(x_{1}\leq \tau \leq x_{2}\). Then the concluding equation has a positive solution.
Proof
We require a fixed point operator of T to research the existence of a positive solution. With Lemma 1 structure, assume that the operator \(T: H\rightarrow H\) is entirely continuous. Consider two arbitrary predator population densities of \(x_{1} \) and \(x_{2} \) in H which meet \(x_{1}\leq x_{2} \) as well as the densities of prey population \(S_{1} \)and \(S_{2} \) in H which satisfy \(S_{1}\leq S_{2}\), then S is a positive function and
are satisfied, thus the mapping T is increasing, we have \(T\bar{\psi }^{\star }_{2}\geq \bar{\psi }^{\star }_{2}\) and \(T\bar{\psi }^{\star }_{2}\leq \bar{\psi }^{\star }_{2}\). So \(T:\langle \bar{\psi }^{\star }_{1},\bar{\psi }^{\star }_{2}\rangle \rightarrow \langle \bar{\psi }^{\star }_{1},\bar{\psi }^{\star }_{2}\rangle \) is a compact operator by the guideline of Lemma 2 and continuous by the perspective of Lemma 1. As H is a normal cone of T [45], this completes the proof. □
Uniqueness of the special solution
Consider
Thus
and
Therefore, if the following conditions hold:
and
then the system produces a unique positive solution because mapping T is a contraction with fixed point.
Numerical approximation
The Atangana–Baleanu FO integral numerical approximation by imposing the Adams–Moulton rule is granted by [24]
where \(b_{\mathbf{r}}^{\epsilon }=(\mathbf{r}+1)^{1-\epsilon }-(\mathbf{r})^{1- \epsilon }\).
With a similar previous numerical method, we have
Now consider FO differential equations with variable-order ABC of model Eq. (2.7), in which, to justify temporal changes, a FO derivative as a variable is used instead of integer-order derivatives.
3.1 Predator–prey model involving variable-order fractional derivative
Adams–Moulton method with variable order
Now, we show an alteration of variable order \(\epsilon (\tau )\) of the Adams–Moulton approach. Along these lines, the algorithm computes numerical results of a FO differential equation of the kind
where \(\epsilon (\tau )>0\) and \({}^{ABC}_{0}D_{\tau }^{\epsilon (\tau )}\) is the variable-order Atangana–Baleanu–Caputo FO derivative.
Equation (3.23) has one solution categorized in \(\tau \in [0,T]\), which can be reformulated by applying the FO Atangana–Baleanu integral as follows:
where \(\varrho (\epsilon (\tau ))=1- \epsilon (\tau ) + \frac{\epsilon (\tau )}{\Gamma (\epsilon (\tau ))}\) represents a normalization function.
The solution plot by applying the trapezoidal quadrature formulation appears as described:
where
and
-
Existence and uniqueness of the solution
Theorem 3
We show the existence and uniqueness of the solution.
Proof
Assuming that the space
we define
and
a compact cylinder of function f in Eq. (3.23) and Eq. (3.24) is \(M_{(T_{\max }},{y_{\max }}_{)}\) and the maximum gradient \(M_{(T_{\max }},{y_{\max }}_{)}\) of a module function is \(K=\sup \Vert f \Vert \). Additionally, \(\mathfrak{F}\) is the time constant for a Lipschitz function f. The Banach fixed point theorem will be used by the metric on its own built-in space \(M {(T {\max }},{y {\max }} )\), which will influence the uniform m norm
Create Picard’s operator
defined by
Find \(\Vert g\Phi f(\tau )-y_{0} \Vert < y_{\max }\) to establish the condition of well-posedness for which
Taking the triangular inequality, we obtain
For the above, we need to have
Presently, use an operator of Picard to contract on \(T_{\max }\) under some condition.
Let \(f_{1}\) and \(f_{2}\) be two functions in \(\mathbb{C}[A_{T_{\max }}(\tau _{0}),D_{y_{\max }}(y_{0})]\), then let us calculate the following:
The condition for contraction is
Under the prior setting, the derived Picard’s operation on a Banach space with the measurement included by norm uniformly is a contraction, hence Φ has the feature that an exceptional function x exists means \(\Phi \mathbf{x}=\mathbf{x}\), which is the special solution of Eq. (3.24). □
4 Predator–prey model with time delay variable-order fractional derivative
Second case
Now we assume the system given by Eq. (2.8). The underneath calculation ascertains a numerical solution of a time delayed FO system:
where \(T\in \mathbb{R}^{+}\), \(g(\tau )\), \(\mathbf{y}(\tau )\) and \(\mathbf{y}(\tau -\delta )\) denote smooth functions and delay by \(\delta \in \mathbb{R}^{+}\).
If f is a continuous function, the solution of Eq. (4.1) with FO Atangana–Baleanu integral may be restated as follows:
While implementing the predictor-corrector algorithm, Eq. (4.2) solution can be discrete where \(\mathbf{y}(\tau )\) should be consistent in \([0,T]\) and differential consistent in \((0,T)\).
Assume a uniform grid \(\{\tau _{\mathbf{r}_{1}}=\mathbf{r}_{1}h:\mathbf{r}_{1}=-\mathfrak{M},- \mathfrak{M}+1,\ldots,-1,0,1,\ldots,N\}\), \(\mathfrak{M}\) and N are integers such that \(\mathfrak{M}=\frac{\delta }{h}\) and \(N=\frac{T}{h}\). Let
notice
Now (4.2) is measured by assigning a trapezoidal quadrature scheme and
where
the predicted value \(y^{P}(\tau _{\mathbf{r}_{1}+1})\) is given by
where \(b_{j,\mathbf{r}_{1}+1}= \frac{h^{\epsilon (\tau _{\mathbf{r}_{1}+1})}}{\epsilon (\tau _{\mathbf{r}_{1}+1})}(( \mathbf{r}_{1}+1-j)^{\epsilon (\tau _{\mathbf{r}_{1}+1})}-(\mathbf{r}_{1}-j)^{ \epsilon (\tau _{\mathbf{r}_{1}+1})})\), \(j=0,1,2,\ldots,\mathbf{r}_{1}\).
The proof of existence and uniqueness given by Eq. (4.5) is acquired according to the past case.
5 Numerical simulations
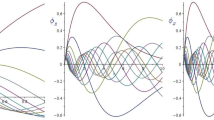
In this section, we show the dynamics of the fractional-order operator on the proposed model in the sense of constant fractional-order ϵ and variable fractional-order operator \(\epsilon (\tau )\). By assuming the parameter values and choosing a numerical method, we illustrate the mathematical results of the system by Eqs. (2.1), (2.7), and (2.8) with the numerical simulations (3.22), (3.26), and (4.5). We observed in the Figs. 2a–2f and 3a–3f that convergency of fractional-order derivative is faster than that of noninteger operator. We analyze the system’s dynamic characteristics to variate fractional-order derivative ϵ and \(\epsilon (\tau )\), individually. Simulated values are \(h=1.2\), \(\mathbf{r}=40\), \(\lambda =1\), \(d=0.4\), \(e=0.2\), \(\mathfrak{M}=0.1\) and the initial conditions are \(\mathbf{x}(0)=3\) and \(\mathbf{y}(0)=1\). In calculating the estimated solution, the step size used was \(Z=0.0001\). The solutions noted in Figs. 1a–1f, 2a–2f, and 3a–3f show numerical analysis of the suggested model’s special solution as a function of time for various estimations of \((\epsilon - \varsigma )\), \((\epsilon (\tau ) - \varsigma (\tau ))\) or delay \((\kappa )\), arbitrary selected. It is significant that expectation relies upon the estimation of alpha not just close to the hypothetical boundaries.

Numerical simulation for the prey–predator model via Atangana–Baleanu–Caputo fractional derivative with constant order (2.1) via the numerical scheme given by Eq. (3.22). In (a)–(b) phase portrait and time series \(\mathbf{x}(\tau )\) and \(\mathbf{y}(\tau )\) for \(\epsilon =1\) and \(\varsigma =1\). In (c)–(d) phase portrait and time series \(\mathbf{x}(\tau )\) and \(\mathbf{y}(\tau )\) for \(\epsilon =0.95\) \(\varsigma =0.9\). In (e)–(f) phase portrait and time series \(\mathbf{x}(\tau )\) and \(\mathbf{y}(\tau )\) for \(\epsilon =0.9\) and \(\varsigma =0.95\)

Mathematical reproduction for the prey–predator design by means of the Atangana–Baleanu–Caputo fractional derivative with variable order (2.7) through the numerical plan indicated by Eq. (3.26). In (a)–(b) phase portrait and time series \(\mathbf{x}(\tau )\) and \(\mathbf{y}(\tau )\) for \(\epsilon = \vert \sin (\epsilon \tau ) \vert \) and \(\varsigma =\tanh (3-\tau )\). In (c)–(d) phase portrait and time series \(\mathbf{x}(\tau )\) and \(\mathbf{y}(\tau )\) for for \(\epsilon =1-\frac{1}{10}\exp (-\frac{1}{2} \tau )\) and \(\varsigma =\frac{\sqrt{\tau }}{2}\). In (e)–(f) phase portrait and time series \(\mathbf{x}(\tau )\) and \(\mathbf{y}(\tau )\) for \(\epsilon = \vert \sin (\epsilon \tau ) \vert \) and \(\varsigma =1-\frac{1}{10}\exp (-\frac{1}{2} \tau )\)

Simulation for the delay prey–predator model of variable order (2.8) of the Atangana–Baleanu–Caputo fractional derivative numerically mentioned as Eq. (4.5). In (a)–(b) phase portrait and time series \(\mathbf{x}(\tau )\) and \(\mathbf{y}(\tau )\) for \(\epsilon = \vert \sin (\epsilon \tau ) \vert \), \(\varsigma =\tanh (3-\tau )\), and \(\kappa =0.01\) seconds. In (c)–(d) phase portrait and time series \(\mathbf{x}(\tau )\) and \(\mathbf{y}(\tau )\) for \(\epsilon =1-\frac{1}{10}\exp (-\frac{1}{2} \tau )\), \(\varsigma =\frac{\sqrt{t}}{2}\), and \(\kappa =0.03\) seconds. In (e)–(f) phase portrait and time series \(\mathbf{x}(\tau )\) and \(\mathbf{y}(\tau )\) for \(\epsilon = \vert \sin (\epsilon \tau ) \vert \), \(\varsigma =1-\frac{1}{10}\exp (-\frac{1}{2} \tau )\), and \(\kappa =0.5\) seconds
6 Conclusions
A model of predator–prey consisting of constant and variable-order time FO with and without delay (gestation delay) involving operators related to a Mittag-Leffler kernel of type Liouville–Caputo is investigated in this paper. Because of this system’s nonlocality, the predator–prey model was manufactured utilizing another FO differentiation developed along with the generalized Mittag-Leffler function as a kernel. With finality to make our model more realistic, preys and predators did not follow the same fractional dynamics and the orders of FO derivatives of prey and predator population concerning time \(\epsilon \in (0,1]\) and \(\varsigma \in (0,1]\) were not equal. The fixed point theorem is beneficial to explain the existence of a novel model having a special set of solutions. We offered a numerical pattern dependent on the Adams–Bashforth–Moulton method for variable order. The existence and uniqueness of this numerical framework and complex dynamics of the structure were studied with modification of fractional orders \((\epsilon - \varsigma )\), \((\epsilon (\tau ) - \varsigma (\tau ))\) or delay \((\kappa )\).
The presented findings emphasize that the variable-order fractional methodology was more appropriate to explain complex dynamics configurations under investigation. Eventually, the predator–prey model may show rich dynamical conduct. An Intel Core i7, 2.6 GHz CPU, 16.0-GB RAM (Matlab R.2013a) computer program was used to get the results in this article.
Availability of data and materials
Data sharing not applicable to this article as no datasets were generated or analysed during the current study.
Change history
17 September 2021
A Correction to this paper has been published: https://doi.org/10.1186/s13662-021-03585-5
References
Magnusson, K.G.: Destabilizing effect of cannibalism on a structured predator–prey system. Math. Biosci. 155(1), 61–75 (1999)
Wang, W., Chen, L.: A predator–prey system with stage-structure for predator. Comput. Math. Appl. 33(8), 83–91 (1997)
Petrovskii, S., Morozov, A.Y., Venturino, E.: Allee effect makes possible patchy invasion in a predator–prey system. Ecol. Lett. 5, 345–352 (2002)
Kar, T.: Stability analysis of a prey–predator model incorporating a prey refuge. Commun. Nonlinear Sci. Numer. Simul. 10, 681–691 (2005)
Tripathi, J., Abbas, S., Thakur, M.: Dynamical analysis of a prey–predator model with Beddington–DeAngelis type function response incorporating a prey refuge. Nonlinear Dyn. 80, 177–196 (2015)
Huang, Y., Chen, F., Li, Z.: Stability analysis of a prey–predator model with Holling type III response function incorporating a prey refuge. Appl. Math. Comput. 182, 672–683 (2006)
Ghanbari, B.: On approximate solutions for a fractional prey–predator model involving the Atangana–Baleanu derivative. Adv. Differ. Equ. 2020, 679, 1–24 (2020)
Ghanbari, B.: On the modeling of the interaction between tumor growth and the immune system using some new fractional and fractional-fractal operators. Adv. Differ. Equ. 2020, 585, 1–32 (2020)
Ghanbari, B.: A fractional system of delay differential equation with nonsingular kernels in modeling hand-foot-mouth disease. Adv. Differ. Equ. 2020, 536, 1–20 (2020)
Rahman, G., Nisar, K.S., Ghanbari, B., Abdeljawad, T.: On generalized fractional integral inequalities for the monotone weighted Chebyshev functionals. Adv. Differ. Equ. 2020, 368, 1–9 (2020)
Ghanbari, B.: On forecasting the spread of the COVID-19 in Iran: the second wave. Chaos Solitons Fractals 140, 110176 (2020)
Salih, D., Behzad, G.: The influence of an infectious disease on a prey–predator model equipped with a fractional-order derivative. Adv. Differ. Equ. 2021, 20, 1–16 (2021)
Munusamy, K., Ravichandran, C., Nisar, K.S., Ghanbari, B.: Existence of solutions for some functional integrodifferential equations with nonlocal conditions. Math. Methods Appl. Sci. 43, 10319–10331 (2020)
Ghanbari, B., Djilali, S.: Mathematical and numerical analysis of a three-species predator–prey model with herd behavior and time fractional-order derivative. Math. Methods Appl. Sci. 43, 1736–1752 (2020)
Ghanbari, B., Atangana, A.: Some new edge detecting techniques based on fractional derivatives with non-local and non-singular kernels. Adv. Differ. Equ. 2020, 435, 1–9 (2020)
Cui, J., Takeuchi, Y.: A predator–prey system with a stage structure for the prey. Math. Comput. Model. 44, 1126–1132 (2006)
Owolabi, K.M., Patidar, K.C.: Higher-order time-stepping methods for time dependent reaction–diffusion equations arising in biology. Appl. Math. Comput. 240, 30–50 (2014)
Khan, A., Gómez-Aguilar, J.F., Khan, T.S., Khan, H.: Stability analysis and numerical solutions of fractional order HIV/AIDS model. Chaos Solitons Fractals 122, 119–128 (2019)
Khan, Z.: On some explicit bounds of integral inequalities related to time scales. Adv. Differ. Equ. 2019, 243, 1–15 (2019)
Khan, H., Gómez-Aguilar, J.F., Alkhazzan, A., Khan, A.: A fractional order HIV-TB coinfection model with nonsingular Mittag-Leffler law. Math. Methods Appl. Sci. 43(6), 3786–3806 (2020)
Khan, H., Li, Y., Khan, A.: Existence of solution for a fractional-order Lotka–Volterra reaction–diffusion model with Mittag-Leffler kernel. Math. Methods Appl. Sci. 42(9), 3377–3387 (2019)
Khan, A., Abdeljawad, T., Gómez-Aguilar, J.F., Khan, H.: Dynamical study of fractional order mutualism parasitism food web module. Chaos Solitons Fractals 134, 109685 (2020)
Khan, A., Gómez-Aguilar, J.F., Abdeljawad, T., Khan, H.: Stability and numerical simulation of a fractional order plant-nectar-pollinator model. Alex. Eng. J. 59(1), 49–59 (2020)
Khan, Z.: Reconstruction of nonlinear integral inequalities associated with time scales calculus. Adv. Differ. Equ. 2020, 380, 1–18 (2020)
Shah, K., Khan, Z., Ali, A., Amin, R., Khan, H., Khan, A.: Haar wavelet collocation approach for the solution of fractional order COVID-19 model using Caputo derivative. Alex. Eng. J. 59, 3221–3231 (2020)
Khan, H., Khan, Z., Tajadodi, H., Khan, A.: Existence and data-dependence theorems for fractional impulsive integro-differential system. Adv. Differ. Equ. 2020, 458 (2020)
Owolabi, K.M., Atangana, A.: Computational study of multi-species fractional reaction–diffusion system with ABC operator. Chaos Solitons Fractals 128, 180–189 (2019)
Sher, M., Shah, K., Khan, Z., Khan, H., Khan, A.: Computational and theoretical modeling of the transmission dynamics of novel COVID-19 under Mittag-Leffler power law. Alex. Eng. J. 59, 3133–3147 (2020)
Owolabi, K.M., Atangana, A.: On the formulation of Adams–Bashforth scheme with Atangana–Baleanu–Caputo fractional derivative to model chaotic problems. Chaos, Interdiscip. J. Nonlinear Sci. 29(2), 023111 (2019)
Owolabi, K.M., Karaagac, B.: Dynamics of multi-pulse splitting process in one-dimensional Gray–Scott system with fractional order operator. Chaos Solitons Fractals 136, 109835 (2020)
Javidi, M., Nyamoradi, N.: Dynamic analysis of a fractional order prey–predator interaction with harvesting. Appl. Math. Model. 37(20), 8946–8956 (2013)
Alkahtani, B.S.T., Atangana, A., Koca, I.: A new nonlinear triadic model of predator–prey based on derivative with non-local and non-singular kernel. Adv. Mech. Eng. 8(11), 1–9 (2016)
Song, P., Zhao, H., Zhang, X.: Dynamic analysis of a fractional order delayed predator–prey system with harvesting. Theory Biosci. 135(1–2), 59–72 (2016)
Nosrati, K., Shafiee, M.: Dynamic analysis of fractional-order singular Holling type-II predator–prey system. Appl. Math. Comput. 313, 159–179 (2017)
Owolabi, K.M., Atangana, A.: Spatiotemporal dynamics of fractional predator–prey system with stage structure for the predator. Int. J. Appl. Comput. Math. 1, 1–22 (2017)
Li, H.L., Zhang, L., Hu, C., Jiang, Y.L., Teng, Z.: Dynamical analysis of a fractional-order predator–prey model incorporating a prey refuge. J. Appl. Math. Comput. 54(1–2), 435–449 (2017)
Atangana, A., Baleanu, D.: New fractional derivatives with nonlocal and non-singular kernel. Theory and application to heat transfer model. Therm. Sci. 20(2), 763–769 (2016)
Samko, S.G.: Fractional integration and differentiation of variable order. Anal. Math. 21(3), 213–236 (1995)
Ahmad, S., Ullah, A., Akgul, A., Baleanu, D.: Analysis of the fractional tumour-immune-vitamins model with Mittag-Leffler kernel. Results Phys. 19, 103559 (2020)
Alkahtani, B.S.T., Koca, I., Atangana, A.: A novel approach of variable order derivative: theory and methods. J. Nonlinear Sci. Appl. 9(6), 4867–4876 (2016)
Atangana, A.: On the stability and convergence of the time-fractional variable-order telegraph equation. J. Comput. Phys. 293, 104–114 (2015)
Sun, H.G., Chen, W., Wei, W., Chen, Y.Q.: A comparative study of constant-order and variable-order fractional models in characterizing memory property of systems. Eur. Phys. J. Spec. Top. 193(1), 185–192 (2011)
Atangana, A., Botha, J.F.: A generalized groundwater flow equation using the concept of variable-order derivative. Bound. Value Probl. 2013(1), 53 (2013)
Atangana, A., Alqahtani, R.T.: Stability analysis of nonlinear thin viscous fluid sheet flow equation with local fractional variable-order derivative. J. Comput. Theor. Nanosci. 13(5), 2710–2717 (2016)
Alkahtani, B.S.T., Atangana, A., Koca, I.: A new nonlinear triadic model of predator–prey based on derivative with non-local and non-singular kernel. Adv. Mech. Eng. 8(11), 1–9 (2016)
Atangana, A., Baleanu, D.: Numerical solution of a kind of fractional parabolic equations via two difference schemes. Abstr. Appl. Anal. 2013, 828764, 1–8 (2013)
Ullah, I., Ahmad, S., Mdallal, Q.A., Khan, Z., Khan, H., Khan, A.: Stability analysis of a dynamical model of tuberculosis with incomplete treatment. Adv. Differ. Equ. 2020, 499, 1–14 (2020)
Yang, X.J.: Fractional derivatives of constant and variable orders applied to anomalous relaxation models in heat-transfer problems. arXiv preprint. arXiv:1612.03202 (2016)
Shakeri, F., Dehghan, M.: Solution of delay differential equations via a homotopy perturbation method. Math. Comput. Model. 48, 486–498 (2008)
Acknowledgements
Aziz Khan would like to thank Prince Sultan University for funding this work through research group Nonlinear Analysis Methods in Applied Mathematics (NAMAM). José Francisco Gómez Aguilar acknowledges the support provided by CONACyT: cátedras CONACyT para jóvenes investigadores 2014 and SNI-CONACyT. G. Fernández-Anaya thanks the support from the DINVP—Universidad Iberoamericana.
Funding
This research was funded by the Deanship of Scientific Research at Princess Nourah bint Abdulrahman University through the Fast-track Research Funding Program.
Author information
Authors and Affiliations
Contributions
AK: writing—original draft, conceptualization, methodology, software. HMA: visualization, investigation, writing—review & editing. JFGÁ: conceptualization, methodology, software, visualization, investigation. ZAK: conceptualization, methodology, software. All authors read and approved the final version of the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
The original online version of this article was revised: the ‘University’ was missed in the affiliation of the second author and is added in the second author’s affiliation.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Khan, A., Alshehri, H.M., Gómez-Aguilar, J.F. et al. A predator–prey model involving variable-order fractional differential equations with Mittag-Leffler kernel. Adv Differ Equ 2021, 183 (2021). https://doi.org/10.1186/s13662-021-03340-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-021-03340-w