
Abstract
Landscape connectivity, the extent to which a landscape facilitates the flow of ecological processes such as organism movement, has emerged as a central focus of landscape ecology and conservation science. Connectivity modelling now encompasses an enormous body of work across ecological theory and application. The dominant connectivity models in use today are based on the framework of ‘landscape resistance’, which is a way of measuring how landscape structure influences movement patterns. However, the simplistic assumptions and high degree of reductionism inherent to the landscape resistance paradigm severely limits the ability of connectivity algorithms to account for many fundamental aspects of animal movement, and thus greatly reduces the effectiveness and relevance of connectivity models for conservation theory and practice. In this paper, we first provide an overview of the development of connectivity modelling and resistance surfaces. We then discuss several key drivers of animal movement which are absent in resistance-based models, with a focus on spatiotemporal variation, human and interspecies interactions, and other context-dependent effects. We look at a range of empirical studies which highlight the strong impact these effects have on movement and connectivity predictions. But we also provide promising avenues of future research to address this: we discuss newly emerging technologies and interdisciplinary work, and look to developing methodologies, models and conversations which move beyond the limiting framework of landscape resistance, so that connectivity models can better reflect the complexities and richness of animal movement.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Green mist red clouds a trail through bamboo - and a hut where quiet lasts - just let go and worries end - stop to think and the mind reappears - an unpolished mirror holds millions of shapes - a bell doesn’t ring until it is rung - our original nature is the real Buddha - nothing solid or empty nothing old or new.
-Stonehouse, translated by Red Pine (2009)
Movement is fundamental to all life processes, and is studied by diverse ecological disciplines. In the context of landscape ecology and conservation science, it is central to gene flow and organism dispersal, and plays a key role in population dynamics (Fahrig 2003; Cushman 2006; Moller et al. 2004). Animal movement behaviour is influenced by multiple biotic and abiotic factors, constituting a complex relationship between individuals and the landscape which is fluid in space and time, and which manifests at different scales (Wiens 1989; Abram 1996; Gibbs 1998; Lorimer 2015). Understanding and predicting animal movement thus forms a cornerstone of ecological science and its application to conservation practice. Yet it is often complex and challenging to accurately model due to the many ways movement occurs in different contexts.
The notion of ‘landscape connectivity’ concerns the extent to which a landscape facilitates the flow of various ecological processes, and is typically studied in the context of animal movement (Tischendorf and Fahrig 2000). It is an emergent and dynamic phenomenon based on the cumulative behavioural and movement choices of individuals across time and space (Cushman et al. 2013a). Conceptually, it provides a tractable and powerful methodology for analysing and mapping animal movement patterns, and its widespread utility has been established across an enormous body of ecological work (Hilty et al. 2012; Rudnick et al. 2012; Kaszta et al. 2020). As such, the theory, modelling and prediction of connectivity has grown to become a central focus of landscape ecology and conservation science.
The dominant paradigm for connectivity modelling uses ‘resistance surfaces’ to reflect the influence of landscape features on organism movement (Zeller et al. 2012). The major appeal of resistance surfaces is their ability to provide a spatially-explicit framework for connectivity models requiring relatively few parameters (Cushman et al. 2013a). However, as we argue in this paper, the simplistic assumptions and high degree of reductionism inherent to the landscape resistance paradigm severely limits the ability of connectivity algorithms to account for many fundamental aspects of animal movement, to the extent that they greatly reduce the effectiveness and relevance of connectivity models for conservation theory and practice. But unlike previous critiques of resistance-based connectivity models (such as Moilanen 2011), this paper is also upbeat and offers promising avenues for future research, emphasising how currently existing models can be expanded and enriched with newly available techniques and methods. It adds to a nascent body of work looking at future developments for connectivity modelling (e.g. Bolliger and Silbernagel 2020).
We begin by providing a technical and historical overview of the development of connectivity modelling and resistance surfaces. We then discuss several important drivers of movement behaviour which are absent in resistance-based models, with a focus on the context-dependent and spatiotemporally dynamic nature of animal movement, and we examine a range of recent empirical studies which demonstrate the substantial effects these have on connectivity predictions. This opens us to a huge and rich area of research, full of unexplored hypotheses which we believe to be central to the future of connectivity modelling. We conclude with a discussion of how we may look to newly emerging technologies and interdisciplinary work to develop methodologies, models and conversations which move beyond the limitations of landscape resistance, so that connectivity models can better reflect the complexities and richness of animal movement.
Landscape connectivity and resistance surfaces: a brief history
The emergence of landscape resistance
Early models for predicting connectivity were developed in the 1990s and 2000s, based on simple adaptations of random walk theory (Codling et al. 2008). Although these individual- (or agent-) based models did incorporate some basic aspects of movement—such as autocorrelation and differential mortality risks (Kareiva and Shigesada 1983; Bergman et al. 2000)—they paid little account to the heterogeneity of the landscape. Where this did appear, it involved no more than simple barriers or homogeneous landscape patches (Dunning et al. 1995; Schumaker 1996). Soon afterwards, the concept of the resistance surface (explained below) was introduced from the field of transport geography as an attempt to quantify how landscape features differentially affect movement, and to provide a greater degree of spatial complexity in connectivity modelling. This was made possible by the availability of increasingly high-quality and fine-scale GIS data, which allowed for more detailed parameterisation of the landscape than the simple habitat patches used in earlier models (Cushman and Huettmann 2010). Since its introduction, the paradigm of landscape resistance has swelled to become the dominant framework with which to model and predict connectivity (Zeller et al. 2012).
Estimating landscape resistance
A resistance surface is a pixelated map of the landscape; each pixel is assigned a numerical value which reflects the estimated ‘cost of movement’ through the region of the landscape corresponding to that pixel. These were originally developed according to ‘expert opinion’ (Adriaensen et al. 2003; Beier et al. 2008), but this approach had major disadvantages due to the lack of empirical evidence for its predictions (Cushman 2006). Hence in the last decade, ecologists have sought to craft methods for creating resistance surfaces which are explicitly informed by empirical data. The first such efforts began by assuming landscape resistance to be directly proportional to the inverse of habitat suitability data (Beier et al. 2009). However, habitat suitability reflects the ability of the landscape to support the needs of an organism dwelling there, whereas connectivity is centrally concerned with movement through the landscape. Habitat suitability has thus been established as an insufficient proxy for estimating resistance to movement in many cases (Wasserman et al. 2010; Keeley et al. 2017).
The most recent attempts to create resistance surfaces have focused on developing methods which optimise a functional relationship between the landscape—represented by a collection of chosen GIS layers—and data on animal movement patterns, for which telemetry or genetic data is often used (Cushman and Lewis 2010; Shirk et al. 2010). This approach typically employs a resource selection function (Boyce et al. 2002). In more detail, this means that a regression model is used with the empirical movement data to estimate the coefficients of a particular linear relationship: it expresses resistance to movement as a function of the different chosen environmental variables, where the coefficients reflect the degree to which each variable is predicted to assist or impede movement (Thurfjell et al. 2014). The resulting linear combination of these GIS layers produces a new layer, which is the resistance surface. Figure 1 illustrates a resistance surface used in Elliot et al. (2014a), created using a path-selection function with telemetry data gathered from the Hwange National Park locale in Zimbabwe.

Example of a resistance surface used in Elliot et al. (2014a). The surface was created using a path-selection function with telemetry data gathered from dispersing lions
Several studies have since shown this functional relationship approach to perform stronger than the earlier methods of expert opinion and habitat suitability (Shirk et al. 2015; Mateo-Sánchez et al. 2015a, b ). Yet there are limitations to the rigour and utility of the telemetry- and genetics-based methods too. Centrally—as for all applications of resource selection function theory—the practitioner must decide a priori which environmental factors are considered influential for movement, and thus which variables are included in predicting landscape resistance (Burnham and Anderson 2004; Manly et al. 2007).
Resistance-based connectivity modelling
Landscape resistance is point-specific: each pixel reflects the estimated difficulty of moving through that specific location in the landscape. It inherently does not account for the emergent routes through the landscape as a whole, which is the central focus of landscape connectivity. Resistance-based connectivity models thus typically work by applying a movement algorithm to a resistance surface in order to obtain predictions of landscape connectivity (Cushman et al. 2013a).
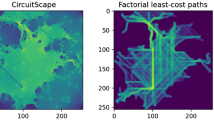
The first resistance-based models of landscape connectivity calculated the ‘least-cost path’ between two points on the resistance surface, as an approximation to the most favourable movement paths in a landscape (Adriaensen et al. 2003). In other words, they computed the route which minimises the accumulated cost of movement between two points. This was later extended by Cushman et al. (2009) to produce a network of least-cost paths between all combinations of any number of source points; similar multiple-path approaches are presented in Rayfield et al. (2010) and Pinto and Keitt (2009). However, there are severe limitations to these least-cost path approaches in practice. Centrally, there is little reason to assume that an animal knows (or even thinks in terms of) the route of the least-cost path. Moreover, the destination point may not be known to the animal prior to or during movement—and even if this were so, obtaining the knowledge of their precise destination can be very difficult in practice, especially with dispersing animals.
Further algorithms for predicting connectivity have since been developed, with the great majority still using the framework of landscape resistance. Presently, two major connectivity models in use are 'resistant kernels' and 'Circuitscape' (Compton et al. 2007; McRae et al. 2008). Resistant kernels is a cost-distance approach based on Dijkstra's algorithm, which estimates connectivity as a function of landscape resistance and dispersal thresholds; it produces a map of connectivity by summing together the expected dispersal density in the pixels around each source point. Circuitscape uses electrical circuit theory, in which the resistance surface is treated as a circuit and animals are modelled as electrons 'flowing through this circuit', with mortality and connectivity quantified by the mathematical relationships of circuit theory. This algorithm produces a map in which the current flowing through each pixel of the resistance surface is assumed to reflect the degree of connectivity. In both cases, animals are modelled as automatons moving according to simple rules from graph theory or random walk theory. See Cushman et al. (2013a) for a summary of resistance-based connectivity modelling. A comparative evaluation of performance and predictive abilities of these connectivity models can be found in Unnithan Kumar and Cushman (2022).
Combining individual- and resistance-based approaches to connectivity
These connectivity models use resistance surfaces to parameterise the energetic 'cost' of moving through the landscape, but this is only one of many factors influencing movement. For example, resistance-based connectivity models do not account for the autocorrelated nature of animal movement (Cushman 2010a)—as acknowledged with Circuitscape in McRae et al. (2008)—despite the present state of an animal’s movement being strongly influenced by their immediate past direction of travel (Dray et al. 2010). In contrast, the earlier agent-based algorithms (such as Kareiva and Shigesada 1983) did incorporate greater detail into simulating individual animal movement, and the mechanisms for individual movement parameters have been developed theoretically since then (DeAngelis and Mooij 2005; Lewis et al. 2013). However, the spatially homogeneous nature of these early individual-based algorithms greatly limited their effective use in landscape ecology and conservation science, in which spatial complexity plays a central role (McGarigal and Cushman 2005).
In light of this, research in connectivity modelling has sought to craft detailed individual-based models which also attend to variations in landscape composition. For example, Schumaker (1996) simulated individual movement using geospatial data on old-growth forest distribution in the Pacific Northwest, in order to assess the effects of habitat fragmentation on dispersal; Hargrove et al. (2005) developed an algorithm to detect dispersal corridors, using geospatial data to provide the locations of habitat patches. Although these models did weave a degree of spatial heterogeneity into their studies of connectivity, they worked with only binary values of landscape structure—namely, whether a location could be considered as habitat or not.
Thus, subsequent work has combined the detail of the individual-based approach with the more continuous measure of spatial patterns given by resistance surfaces. For example, Pathwalker (Unnithan Kumar et al. 2022a) simulates organism movement and predicts connectivity on a resistance surface as a function of several parameters other than energetic cost, including: mortality risk, autocorrelation, and bias towards chosen locations, all at multiple spatial scales. The algorithms HexSim (Schumaker and Brookes 2018) and RangeShifter (Bocedi et al. 2021) model movement based on the interplay of population dynamics and individual characteristics in a spatially-explicit framework. For example, HexSim allows for the use of multiple resistance-like surfaces which approximate landscape features such as food and nesting resources, in addition to a measure of the energetic cost of movement from a traditional resistance surface. These spatially heterogeneous individual-based models thus address some key drivers of movement which are missing in the simplistic assumptions used by the currently dominant resistance-based connectivity algorithms.
The trouble with landscape resistance
As discussed above, certain important aspects of animal movement which are absent in popular resistance-based algorithms like Circuitscape and other least-cost path approaches are addressed to some degree by recent spatially-explicit individual-based models such as Pathwalker. Yet it will be manifestly apparent that several fundamental drivers of movement and connectivity are not accounted for in currently available models which use the framework of landscape resistance. Centrally, there is a conspicuous lack of spatiotemporal variation and contextual detail in the animal's movement behaviour and their relationship with the landscape.
All scientific models ostensibly require a simplification of ecological complexity and dynamics. But does the extent of the reductionism involved in current resistance-based connectivity models, and their simplistic assumptions about animal behaviour, render them ineffective for application to the realities of conservation practice and landscape ecology?
The influence of spatiotemporal nonstationarity and context dependence on the actual patterns of animal movement has been largely unexplored in the scientific literature. Recent works, described below, are only just beginning to scratch the surface of this question, but already they point towards the enormous effect these factors can have on movement and connectivity predictions. In this section, we discuss conceptual arguments and look at a range of empirical studies, in order to establish the importance of spatiotemporal and context-dependent effects in understanding and modelling landscape connectivity.
Spatiotemporal effects
Temporal variability
The landscape resistance paradigm assumes that an animal’s movement decisions do not change over time, and thus is unable to account for the migratory, diurnal, seasonal and life-history cycles which greatly influence the way animals move through the landscape. Of these temporal changes, it is most obvious that connectivity for migratory species is inherently variable over time (Webster et al. 2002). What about the broader effects of seasonal cycles of animal and landscape on connectivity predictions?
From a year-long study of African elephant movement, Kaszta et al. (2021) found dramatic variation in landscape resistance and connectivity predictions in different months, highlighting a ‘potentially serious problem in using movement models from a particular temporal snapshot to infer general landscape effects on movement’. In a different study of African elephants, Osipova et al. (2019) conclude that ‘models disregarding seasonal resource fluctuations underestimate connectivity for the wet and transitional seasons, and overestimate connectivity for the dry season’. The temporally static nature of a resistance surface ignores the dynamism of the landscape itself, which is a process always in flux rather than a fixed entity (Ingold 1993; Lorimer 2015; Nhat Hanh 1993). Temporal landscape variation, such as seasonal rainfall and vegetation change, often greatly alters animal movement pathways, as demonstrated in Cushman et al. (2005).
Additionally, the broader temporal scale of an animal’s life history is not incorporated into the widely-used connectivity models, despite its established importance on patterns of movement and connectivity. For example, in a decade-long study of African lions, Elliot et al. (2014a) found connectivity predictions for young males to be vastly different than for adults, concluding that ignoring demographic variation when ‘parameterizing resistance surfaces intended for connectivity modelling may lead to erroneous conclusions about connectivity and potentially unsound management strategies’. Particularly with intra- and interspecific relationships, these dispersal and home range movement patterns interact with diurnal variation (Hearn et al. 2018; Broekhuis et al. 2019), and the temporality of the landscape itself (Schwartz et al. 2009).
Spatial variability
The question of spatial nonstationarity refers to whether the relationship between animal and landscape varies across space; and if so, to what extent does this variability affect resistance-based connectivity models? In other words, does the spatially unchanging functional relationship used to build a resistance surface from empirical data result in models whose predictions do not accurately reflect the actual pathways of movement and connectivity in different landscapes?
In ecological science, the biotic or abiotic variables which ostensibly have the greatest impact on the viability of animal movement or dwelling in a particular region are known as ‘limiting factors’ (Cushman et al. 2013b). Vergara et al. (2017) found that the limiting factors which most strongly influenced stone marten genetic connectivity varied vastly across Iberia. Their results highlight the importance for landscape models to be developed specific to the region of interest as a precursor to conservation management decisions, and for the effects of spatial nonstationarity to be carefully considered and evaluated in any application of connectivity modelling. In a study through both central and western India, Reddy et al. (2019) found tiger movements to be primarily related to topographic roughness and secondarily to diffuse disturbance. However, the relationship between the tiger and these two limiting factors was inverted between the west and central India, suggesting that a resistance surface built from a spatially constant functional relationship would at best be appropriate for only one of these two regions.
In some cases, such as the study of the American black bear in Cushman et al. (2014), resistance surfaces may provide adequate information to explain observed movement patterns. Yet the above recent works, and many others (e.g. Cushman et al. 2011; Reding et al. 2013; Shirk et al. 2015), give strong evidence that the movement choices made by animals in relation to different landscape features will vary through space, and that these variations substantially impact connectivity predictions. This spatially dynamic relationship between animal and landscape also interacts with human presence: for example, the sparse cover of hedgerows may be preferred in arable landscapes without forest, but not when more continuous forest is present (Tree 2018). Certain dense forest patches may be entirely avoided (Hearn et al. 2018), or highly desirable (Mathur 2021), dependent on the many possible effects of human presence on nonhuman movement. We discuss this further in the section on human-nonhuman interactions below.
Noise or fundamental driver?
Cushman (2010b) asked whether spatiotemporal complexity in ecological systems is merely noise around a stable, equilibrium state; or instead, is this variability in space and time a core driver of such systems, so that ‘ideal’ models which are spatiotemporally homogeneous do not represent the fundamental dynamics of ecological processes?
As described earlier, resistance surfaces are created from a functional relationship with a chosen set of environmental factors, and this relationship (which is typically linear or logistic) is modelled as stationary in both time and space. The above studies on spatiotemporal variation are mostly very recent; thorough investigations into these effects are only just beginning in ecological science research. In some cases, such as the aforementioned empirical study of the American black bear, landscape resistance may provide a sufficient explanation of observed movement patterns. Yet in the majority of studies published to date which analyse landscape effects on movement and connectivity predictions, spatial and temporal change is seen to have dramatic impact, to the degree that the equilibrium and stationary assumptions in the landscape resistance paradigm result in connectivity models which are often inadequate for conservation practice and management.
This growing body of work points towards embracing that an animal’s relationship with a region of the landscape is not composed by a universal and unchanging set of separate factors, as chosen by the modeller (such as elevation, terrain slope, forest cover, and so on). Instead, it is dynamic on multiple scales, thoroughly place-based, and experienced in relation to the composition of the landscape as a whole (Abram 1996; Ingold 2000, 2011; Powell and Mitchell 2012). In other words, this inherent spatiotemporal complexity is central to understanding the relationship between an animal and the landscape which it is part of, to the extent that much of animal movement through a changing landscape cannot be understood using only a pixelated map created from a weighted sum of static geospatial image layers.
Recent ecological work has looked at incorporating spatiotemporal variability into a resistance-based framework: for example, by adapting connectivity models so that the coefficients of the geospatial layers used to create the resistance surface vary with time, or with the location of the animal (Schumaker and Brookes 2018; Jennings et al. 2020; Zeller et al. 2020; Bocedi et al. 2021). However, the topic of nonstationarity in space and time is part of a broader issue of the many ways in which movement is thoroughly context-dependent. We now turn to examples of the effects of context dependence on connectivity modelling, and examine how they fundamentally call into question the paradigmatic assumptions of resistance surfaces, and the simplistic cost–benefit approach to quantifying animal movement.
Context dependence
Intraspecific and interspecific interactions
The pathways travelled by an animal are shaped by, and often centered around, their relationships with the changing presence and movements of other animals. Intimacy, territoriality, hunger, love, competition, curiosity, dialogue, a web of social dynamics, and countless other relational bonds, can be fundamental drivers of movement patterns. What effect do these interactions have on connectivity predictions?
The decade-long study of African lions in Elliot et al. (2014b) provides ‘the first investigation of seasonal movement patterns during dispersal in conjunction with territorial adults and how this varies depending on group size’, in which they found intraspecific group size to have a substantial impact on the pathways travelled by the lions. Social relations between demographic categories were seen to explain radically different predictions of connectivity (Elliot et al. 2014a). Broekhuis et al. (2019) analyse the relational movement of male cheetahs, and its link with territoriality and mortality, 'giving a first detailed insight into intraspecific interactions in cheetah[s].' As mentioned earlier, these effects on movement will vary with the spatiotemporal heterogeneity of the landscape (Gorini et al. 2012).
A similar argument applies to interspecific interactions, in which the details of a predatory or coexistive relationship play a key role in movement behaviour, as demonstrated in Broekhuis et al. (2013). Studying the relationships between cheetahs, lions and spotted hyaenas, they found cheetah movement routes to be highly influenced by the changing presence of lions; in conclusion, they encourage ‘a more dynamic approach to investigate interactions between species’. In a seven-year study using 'the largest Bornean felid detection dataset to date', Hearn et al. (2018) investigate the spatiotemporally dynamic coexistence of five felids, and analyse the intra- and interspecific influences on their spatial distribution.
Perhaps due to the complexity of such empirical investigation, few field-based analyses have emerged in the ecological science literature which look at the impact of creaturely interactions on connectivity predictions. Moreover, these relational drivers of spatial distribution also mix with the effects of human presence (discussed in the next section). For some species, these interactions may not be crucial to understanding their movement patterns. However, because connectivity pathways result from the cumulative movement choices made by individual animals, these above studies, among others, suggest connectivity predictions to be highly sensitive to many intra- and interspecific relationships (as explicitly shown in Elliot et al. 2014a).
This gives rise to many interesting hypotheses, which could be tested and explored using simulation techniques. For example, flexible existing individual-based models like Pathwalker and HexSim could be used—or straightforwardly adapted—to include parameters for simulating particular interactive effects, and assessing their impacts on connectivity. More broadly however, the degree of theoretical reductionism inherent to the landscape resistance paradigm does make it a rigid framework in which to perform such investigations (Moilanen 2011): due to the many different ways in which creatures relate and interact with each other, resistance-based models appear to be greatly limited by the cost–benefit, ‘animal economicus’ approach to modelling movement choice (Unnithan Kumar et al. 2022b). Can we develop ways to measure and quantify ecological processes that are not forced into this simplistic assumption of animal behaviour, which does little to reflect the complex and rich reality of these lively relationships?
Human-nonhuman interactions
Humans have long been, and still are, part of the interconnected ecological flows of this living and breathing world. However, the earth’s ecosystems are now increasingly shaped by anthropogenic presence. Conservation science thus inherently requires attention to be given to human-nonhuman relationships; for the effective modelling and application of landscape connectivity, it is obvious that these effects on movement patterns must be adequately accounted for. Traditional, ideal movement models which ignore the complexities of human influence on animal behaviour for the sake of theoretical and algorithmic simplicity are thus growing increasingly unreliable (Pooley et al. 2017; Berkes et al. 2008; Benson 2014). Ecological processes in reality do not follow a neat distinction between 'nature' and 'society' (Lorimer 2015; Cronon 1996; Ingold 2000). Indeed, Boettiger et al. (2011) show in a study with African elephants that predictions with existing movement models 'were most frequently inaccurate outside protected area boundaries near human settlements, suggesting that human activity disrupts typical elephant movement behavior.'
In producing a resistance surface, human presence is typically reduced to a static geospatial image layer, with each pixel given a positive or negative value according to the estimated push–pull effect of that region on animal movement. Many of the connectivity studies mentioned above point towards the impacts of human settlements on movement patterns and connectivity predictions, and the complex yet key effects these have on how animals move in relation to other animals. Can the reality of these effects be adequately captured by the spatiotemporally fixed, push–pull quantification of human presence used in resistance surfaces?
Penjor et al. (2022) show in their empirical analysis of carnivore groups in Bhutan that human settlements strongly shape movement patterns and spatial distribution, but that the effects are contrasting and varied. Integrating several methods from landscape ecology and landscape genetics in studying the anthropogenic impact on Sunda clouded leopards, Kaszta et al. (2019) find that management decisions using resistance-based connectivity models ‘might be misleading and may in some cases lead to decrease in population size’, if other factors like mortality risk are not accounted for. Rostro-García et al. (2016), in an empirical study showing how the relative movements of tigers, humans and leopards are varied and complex, conclude: 'it should be realized that all maps are partial truths, and their ability to approach reality can only be judged when ground-truthed.' Maps are representations built with particular methodologies; they are not the landscape itself (Patel and Moore 2017; Ingold 1993).
Many other studies reach similar conclusions, showing that resistance surfaces alone account for little of the complexities of how human presence—which itself is often dynamic—influences nonhuman movement patterns. Some, such as Elliot et al. (2014a , b), demonstrate how certain animals, which may generally avoid human settlements, are found to move in close proximity with humans due to intraspecific social dynamics. Others, such as Ash et al. (2020), highlight the importance of temporally varying mortality risk on species movement.
Rigorous and detailed analyses of how human-nonhuman interactions affect animal movement can be found in the overlapping disciplines of the conservation and environmental social sciences (Bennett et al. 2017). For example, in a study of Asian elephants, Barua (2014a) uses telemetry measurements and GIS data, together with data on land use change and interviews with local farmers, to obtain a more complete understanding of elephant movement patterns. In doing so, the multifaceted nature of human-elephant interactions is found to influence movement patterns in unexpected ways (Barua 2014b).
The utility of more interdisciplinary approaches to understanding animal movement and connectivity, and their compatibility with the diverse scientific analyses mentioned above, is being widely established in conservation science and landscape ecology, and we discuss this further in the conclusion. Interactions—with humans or other animals—are often fundamental drivers of movement patterns, and these fluid encounters are rarely captured by the binary cost–benefit framework of resistance surfaces, which collapses these dynamics into a single, static number (Abram 2010; Peterson et al. 2010; Pooley et al. 2017; Frank et al. 2019).
Dynamic individuation: internal states and movement behaviour
We now address one final aspect of context dependence, which has been a key focus in the growing field of movement ecology: the central importance of an animal’s internal states—physiological, emotional, physical—for shaping their movement patterns. Resistance surfaces, and the widely-used connectivity models based upon them (such as Circuitscape and resistant kernels), inherently assume an unchanging and universally applicable caricature of animal behaviour, in which animals are typically modelled as automatons following simple random walk rules. However, the internal state of an individual creature, varying through space and time—which we call dynamic individuation—has been increasingly recognised as a core component of movement ecology, and its application to conservation science (Nathan et al. 2008; Jeltsch et al. 2013). For example, in their study of puma movement patterns Zeller et al. (2014), found landscape resistance estimates to be sensitive to both spatial scale and movement behaviour, with different behavioural states inverting the puma's relationship with several landscape features. As a result, they 'recommend examining a continuum of scales and behavioral states' when estimating landscape resistance.
There is ostensibly little room in the framework of landscape resistance for understanding the ways an animal's internal state affects predictions of movement (and thus, connectivity). Though it is of central importance as a driver of animal movement patterns (Holyoak et al. 2008), incorporating such information into connectivity modelling appears challenging, and until recently may not have been plausible (as discussed in Bolliger and Silbernagel 2020). But newly emerging technologies, particularly in the recent field of conservation physiology, provide a rich and promising place from which to creatively develop methods to address this—see Cooke et al. (2013), who note that '[w]hen physiological knowledge is incorporated into ecological models, it can improve predictions of organism responses to environmental change and provide tools to support management decisions.'
For example, Cooke et al. (2012) link physiological and migratory data to provide valuable insights into the movement and survival of Pacific salmon, concluding that 'the best and only way to address complex conservation problems is through interdisciplinary research, of which conservation physiology is certainly becoming a recognized and important contributor.' Sherub et al. (2017) survey the development of biologging sensors in conservation practice, and use these sensors with GPS telemetry data to study the flight paths and mortality of Himalayan vultures.
Intuitively, conservation practitioners may expect a creature in a state of fear to respond to the landscape very differently to one in a state of calm, joy, sexual arousal or hunger. The emerging availability of biologging sensors in conservation practice is beginning to help understand how emotional and physiological states affect movement patterns (Bograd et al. 2010; Wilson et al. 2015). Further examples for integrating physiology, behaviour and conservation practice can be found in Cooke et al. (2014). See Ellis et al. (2012) for an extensive discussion of the value of conservation physiology for landscape ecology and conservation science, and their possibility for integration. These newly available conservation technologies also raise other crucial questions for wildlife management, such as those discussed in Arts et al. (2015), Parreñas (2018) and Bergman (2005).
More broadly, the assumption that animals behave as random walking automatons is also challenged by a question of vital importance for ecological practitioners across all disciplines: are we concerned only with maintaining the numbers of a population, or do we also place importance on the quality of the lives lived by the animals we study? These two priorities are inseparable, and both are essential for effective and resilient conservation practice (Wallach et al. 2018; Sekar and Shiller 2020; Hooks 2001). Focusing solely on population numbers to the exclusion of other such considerations has led to serious unintended consequences and harm in conservation efforts (Adams and Mulligan 2012; Pooley et al. 2017; Parreñas 2018; Paquet and Darimont 2010). The reduction of animal liveliness to simplistic adaptations of graph theory or random walk theory, modelled within the attraction-aversion framework of landscape resistance, is not only a poor methodology for reflecting the actual movement patterns relevant to conservation practice and landscape ecology—as historian of wildlife tracking technologies Etienne Benson (2016) explains, this ‘behavioural minimalism’ also leaves no scope for attending to the quality and richness of individual lives. Developing methods to account for dynamic individuation thus seems to be a promising, exciting and vital aspect of the future of movement and connectivity modelling.
Conclusion: moving beyond landscape resistance
Landscape connectivity has become a central focus of theoretical and applied ecological research. The paradigm of landscape resistance has become the dominant framework with which to develop connectivity models, providing a spatially-explicit foundation requiring relatively few parameters. Resistance surfaces and resistance-based connectivity algorithms typically model animals as random-walking automatons, moving in relation to the landscape according to a simplistic set of movement rules which do not vary in space and time.
However, connectivity is fundamentally a phenomenon which emerges from cumulative animal movement patterns. As we have argued in this paper, animal movement behaviour is dynamic in space and time, is inherently shaped by their internal states, and is thoroughly influenced by their rich and complex interactions with other creatures. Through both conceptual discussion and a survey of recent empirical studies of movement and connectivity, we have demonstrated that ignoring these fundamental drivers of movement often greatly limits the effectiveness and reliability of resistance-based connectivity algorithms. We acknowledge that all models require a simplification of ecological processes, and a choice of which biotic and abiotic effects on movement are considered significant enough to include as parameters. But the analyses presented and discussed in this paper highlight that the degree of reductionism inherent to the landscape resistance paradigm, and the rational-choice, cost–benefit assumptions made on animal movement behaviour, provide an often inadequate basis for connectivity models to have appropriate and useful application to conservation practice and policy.
We still believe that resistance surfaces can be very helpful for connectivity analyses, and will likely continue to have widespread application in landscape ecology and conservation science. The focus of this paper has been to show that accurately understanding and predicting movement and connectivity requires methods which account for aspects of animal movement other than just landscape resistance alone. Yet conceptually and in practice, it appears a challenging task for ecological practitioners to integrate spatiotemporal variability and context dependence into workable and effective models. We have intended in this paper to stimulate and draw attention to what promises to be a rich field of research, and one which we believe will be crucial for the development of many ecological disciplines. We thus end by revisiting the following question, which has been raised throughout this paper: as an ecological community, how are we to approach and develop techniques and methodologies which allow models to better reflect the realities of movement and connectivity?
Hypothesis testing, validation and simulation experiments
The studies discussed in this paper which evaluate and validate connectivity models have only just scratched the surface of an important set of hypotheses. Through decades of investigations and analyses, ecological science established the importance of scale as a fundamental aspect of ecosystem dynamics and animal movement (Wiens 1989; Levin 1992; Zeller et al. 2014). Attending to the temporal, spatial, and other context-dependent drivers of movement and is now long overdue. The empirical studies discussed in earlier sections highlight the substantial influence of these effects on connectivity predictions, and the inadequacy of current models, which are often too simplistic to appropriately inform conservation in practice. But empirical data alone is typically insufficient to thoroughly evaluate the performance and accuracy of connectivity models, since the underlying relationship between landscape and movement behaviour remains unknown and need not be reflected by the empirical data, and thus can only be inferred inductively (Cushman and Landguth 2010).
Working instead with simulated data reverses this process, since we are able to compare connectivity predictions to the ‘known truth’ of the connectivity pathways generated by simulated movement data. The importance and utility of simulation techniques for addressing key ecological questions has been established in many branches of spatial ecology: for example, the use of CDPOP in landscape genetics (Cushman et al. 2012; Shirk et al. 2018), and HexSim in population dynamics (Stronen et al. 2012; Heinrichs et al. 2016). Simulation tools thus provide a powerful and tractable framework with which to explore hypotheses concerning the influence of spatiotemporal variability and context dependence on connectivity predictions.
In particular, flexible spatially-explicit individual-based movement algorithms which are used for connectivity modelling—like Pathwalker, HexSim and RangeShifter—provide an excellent place from which to evaluate a wide range of theoretical and methodological questions in this area (e.g. Unnithan Kumar and Cushman 2022). Although these models still make use of resistance surfaces to provide the spatial input data, all three afford greater complexity to animal movement behaviour than models like Circuitscape and resistant kernels, and can straightforwardly be adapted to include additional parameters. For example, by simultaneously varying spatial input data with mortality risk, spatial scaling and directionality bias, Pathwalker provides a highly capable framework for investigating the precise effects of key drivers of movement patterns beyond just landscape resistance.
Interdisciplinary collaboration: models, methodologies, practice
Earth’s landscapes are increasingly shaped by anthropogenic presence, to the extent that ecological models which do not adequately attend for these impacts are likely to be ineffective and inappropriate for use in applied ecology. Moreover, since landscape ecology and conservation science are inherently interdisciplinary (Farina 2008; Kareiva and Marvier 2012), this is an excellent opportunity in which to draw upon the conservation social sciences. In recent years, contributions from these overlapping fields have been recognised as crucially important for all areas of conservation theory, modelling and practice (Bunnefeld et al. 2017). While disciplinary boundaries are often useful for focusing study and investigation, they must not become rigid categories which prevent the collaborations and conversations that are vital for the development of ecological science (Campbell 2005; Pooley et al. 2014; Johnson et al. 2016; Parathian et al. 2018). Adequately attending to the human dimensions of conservation practice is essential for such efforts to be successful (Adams et al. 2004; Ntuli et al. 2019). See Bennett et al. (2017) for a succinct and helpful overview of the value and fundamental importance in engaging with techniques, models and methods from the conservation social sciences.
The context-dependent effects on animal movement discussed in this paper, while demonstrated to often have a substantial influence on movement and connectivity predictions, may be difficult to address with existing mainstream quantitative techniques. In this regard, our intention is not to prematurely prescribe the exact methods for expanding the current field of connectivity modelling; instead, we aim to stimulate research and exploration into the many rich possibilities which arise from working to address the issues raised in this paper. Recent analyses in interrelated fields, such as ethnobiology, conservation geography, and multispecies ethnography, bring more relevant and powerful complementary techniques to landscape ecology and conservation science than ever before, as discussed in Parathian et al. (2018). These disciplines offer valuable material which may enable scientists to identify new parameters and objectives for models to fit better with the realities of conservation practice.
For example, the aforementioned study in which Barua (2014a) tracks elephant movements using telemetry, ethnographic and historical data together produces much greater insight into elephant movement patterns than with any one data type alone. Similarly, Parathian et al. (2018) synthesise primatology science with multispecies ethnography to give crucial information on the spatial distribution and conservation of western chimpanzees. Hodgetts and Lorimer (2015, 2020) introduce the concept of animals' mobilities, and discuss methodologies and studies involving tracking and genetic technologies (e.g. Cantor et al. 2012), which may help to address the spatiotemporally varying effects of social dynamics on individual and collective movement. Holistic approaches to connectivity are necessary for considering the many factors required for effective and resilient conservation practice (Hodgetts 2018). Paltsyn et al. (2019) integrate traditional ecological knowledge with remote sensing technologies to produce more robust maps of vegetation dynamics for management and policy. The seminal work of Berkes (2017) provides a comprehensive account of how scientific modelling and traditional ecological knowledge can greatly enrich and complement each other, addressing several key contemporary issues in conservation management (see also Salmón 2000; Kimmerer 2013). Scientists and modellers who are willing to engage with this interdisciplinary literature may find themselves at the forefront of revolutionary advances in applied ecological research.
Conclusion
Connectivity modelling is a rich and rapidly growing subdiscipline which lies at the heart of theoretical and applied ecology. Two decades ago, 'landscape resistance' emerged as the dominant paradigm for mapping connectivity, because it provided the best spatially-explicit framework available at the time. However, the reductionism and simplistic assumptions inherent to resistance surfaces do not account for several fundamental drivers of movement and connectivity, such as spatiotemporal variation, species interactions and other context-dependent effects. Through conceptual discussion and a range of recent empirical studies, we have highlighted how resistance-based connectivity models can thus be ineffective and unreliable for application to conservation practice. In light of this, we have drawn on emerging research across ecological disciplines to look at how to expand methodologies and techniques in conservation science, so that our models can better reflect the complexities of animal movement in this mysterious and beautiful world.
References
Abram D (1996) The spell of the sensuous. Vintage Books, New York
Abram D (2010) Becoming animal. Vintage Books, New York
Adams WB, Mulligan M (2012) Decolonizing nature: strategies for conservation in a post-colonial era. Routledge, London
Adams W M, Aveling R, Brockington D, Dickson B, Elliott J, Hutton J, Roe D, Vira B, Wolmer W (2004). Biodiversity conservation and the eradication of poverty. Science 306(5699):1146–1149
Adriaensen F, Chardon JP, De Blust G, Swinnen E, Villalba S, Gulinck H, Matthysen E (2003) The application of ‘least-cost’modelling as a functional landscape model. Landsc Urban Plan 64(4):233–247
Arts K, van der Wal R, Adams WM (2015) Digital technology and the conservation of nature. Ambio 44(4):661–673
Ash E, Cushman SA, Macdonald DW, Redford T, Kaszta Ż (2020) How important are resistance, dispersal ability, population density and mortality in temporally dynamic simulations of population connectivity? A case study of tigers in Southeast Asia. Land 9(11):415
Barua M (2014a) Bio-geo-graphy: Landscape, dwelling, and the political ecology of human-elephant relations. Environ Plan D 32(5):915–934
Barua M (2014b) Volatile ecologies: towards a material politics of human—animal relations. Environ Plan A 46(6):1462–1478
Beier P, Majka DR, Spencer WD (2008) Forks in the road: choices in procedures for designing wildland linkages. Conserv Biol 22(4):836–851
Beier P, Majka DR, Newell SL (2009) Uncertainty analysis of least-cost modeling for designing wildlife linkages. Ecol Appl 19(8):2067–2077
Bennett NJ, Roth R, Klain SC, Chan K, Christie P, Clark DA et al (2017) Conservation social science: understanding and integrating human dimensions to improve conservation. Biol Conserv 205:93–108
Benson ES (2014) Minimal animal: surveillance, simulation, and stochasticity in wildlife biology. Antennae 30:39
Benson ES (2016) Movement ecology and the minimal animal. LA+ Simul 4:30–33
Bergman C (2005) Inventing a beast with no body: radio-telemetry, the marginalization of animals, and the simulation of ecology. Worldviews: Glob Relig C Ecol 9(2):255–270
Bergman CM, Schaefer JA, Luttich SN (2000) Caribou movement as a correlated random walk. Oecologia 123(3):364–374
Berkes F (2017) Sacred ecology. Routledge, London
Berkes F, Colding J, Folke C (eds) (2008) Navigating social-ecological systems: building resilience for complexity and change. Cambridge University Press, Cambridge
Bocedi G, Palmer SC, Malchow AK, Zurell D, Watts K, Travis JM (2021) RangeShifter 2.0: an extended and enhanced platform for modelling spatial eco-evolutionary dynamics and species’ responses to environmental changes. Ecography 44(10):1453–1462
Boettiger AN, Wittemyer G, Starfield R, Volrath F, Douglas-Hamilton I, Getz WM (2011) Inferring ecological and behavioral drivers of African elephant movement using a linear filtering approach. Ecology 92(8):1648–1657
Bograd SJ, Block BA, Costa DP, Godley BJ (2010) Biologging technologies: new tools for conservation. Introduction. Endanger Spec Res 10:1–7
Bolliger J, Silbernagel J (2020) Contribution of connectivity assessments to green infrastructure (GI). ISPRS Int J Geo Inf 9(4):212
Boyce MS, Vernier PR, Nielsen SE, Schmiegelow FK (2002) Evaluating resource selection functions. Ecol Model 157(2–3):281–300
Broekhuis F, Cozzi G, Valeix M, McNutt JW, Macdonald DW (2013) Risk avoidance in sympatric large carnivores: reactive or predictive? J Anim Ecol 82(5):1098–1105
Broekhuis F, Madsen EK, Keiwua K, Macdonald DW (2019) Using GPS collars to investigate the frequency and behavioural outcomes of intraspecific interactions among carnivores: a case study of male cheetahs in the Maasai Mara, Kenya. PLoS ONE 14(4):e0213910
Bunnefeld N, Nicholson E, Milner-Gulland EJ (eds) (2017) Decision-making in conservation and natural resource management: models for interdisciplinary approaches (vol 22). Cambridge University Press, Cambridge
Burnham KP, Anderson DR (2004) Multimodel inference: understanding AIC and BIC in model selection. Sociol Methods Res 33(2):261–304
Campbell LM (2005) Overcoming obstacles to interdisciplinary research. Conserv Biol 19(2):574–577
Cantor M, Wedekin LL, Guimaraes PR, Daura-Jorge FG, Rossi-Santos MR, Simoes-Lopes PC (2012) Disentangling social networks from spatiotemporal dynamics: the temporal structure of a dolphin society. Anim Behav 84(3):641–651
Codling EA, Plank MJ, Benhamou S (2008) Random walk models in biology. J R Soc Interface 5(25):813–834
Compton BW, McGarigal K, Cushman SA, Gamble LR (2007) A resistant‐kernel model of connectivity for amphibians that breed in vernal pools. Conserv Biol 21(3):788–799
Cooke SJ, Hinch SG, Donaldson MR, Clark TD, Eliason EJ, Crossin GT et al (2012) Conservation physiology in practice: how physiological knowledge has improved our ability to sustainably manage Pacific salmon during up-river migration. Philos Trans R Soc B 367(1596):1757–1769
Cooke SJ, Sack L, Franklin CE, Farrell AP, Beardall J, Wikelski M, Chown SL (2013) What is conservation physiology? Perspectives on an increasingly integrated and essential science. Conserv Physiol 1(1):cot0001
Cooke SJ, Blumstein DT, Buchholz R, Caro T, Fernandez-Juricic E, Franklin CE et al (2014) Physiology, behavior, and conservation. Physiol Biochem Zool 87(1):1–14
Cronon W (1996) The trouble with wilderness: or, getting back to the wrong nature. Environ Hist 1(1):7–28
Cushman SA (2006) Effects of habitat loss and fragmentation on amphibians: a review and prospectus. Biol Cons 128(2):231–240
Cushman SA (2010a) Animal movement data: GPS telemetry, autocorrelation and the need for path-level analysis. In: Spatial complexity, informatics, and wildlife conservation. Springer, Tokyo, pp 131–149
Cushman SA (2010b) Space and time in ecology: noise or fundamental driver?. In Spatial complexity, informatics, and wildlife conservation. Springer, Tokyo, pp 19–41
Cushman SA, Huettmann F (eds) (2010) Spatial complexity, informatics, and wildlife conservation. Springer, Tokyo, pp 349–368
Cushman SA, Landguth EL (2010) Spurious correlations and inference in landscape genetics. Mol Ecol 19(17):3592–3602
Cushman SA, Lewis JS (2010) Movement behavior explains genetic differentiation in American black bears. Landscape Ecol 25(10):1613–1625
Cushman SA, Chase M, Griffin C (2005) Elephants in space and time. Oikos 109(2):331–341
Cushman SA, McKelvey KS, Schwartz MK (2009) Use of empirically derived source-destination models to map regional conservation corridors. Conserv Biol 23(2):368–376
Cushman SA, Raphael MG, Ruggiero LF, Shirk AS, Wasserman TN, O’Doherty EC (2011) Limiting factors and landscape connectivity: the American marten in the Rocky Mountains. Landscape Ecol 26(8):1137–1149
Cushman SA, Shirk A, Landguth EL (2012) Separating the effects of habitat area, fragmentation and matrix resistance on genetic differentiation in complex landscapes. Landscape Ecol 27(3):369–380
Cushman SA, McRae B, Adriaensen F, Beier P, Shirley M, Zeller K (2013a) Biological corridors and connectivity. In: Macdonald DW, Willis KJ (eds) Key topics in conservation biology 2. Hoboken, NJ, Wiley-Blackwell, pp 384–404
Cushman SA, Shirk AJ, Landguth EL (2013b) Landscape genetics and limiting factors. Conserv Genet 14(2):263–274
Cushman SA, Lewis JS, Landguth EL (2014) Why did the bear cross the road? Comparing the performance of multiple resistance surfaces and connectivity modeling methods. Diversity 6(4):844–854
DeAngelis DL, Mooij WM (2005) Individual-based modeling of ecological and evolutionary processes. Annu Rev Ecol Evol Syst 36:147–168
Dray S, Royer-Carenzi M, Calenge C (2010) The exploratory analysis of autocorrelation in animal-movement studies. Ecol Res 25(3):673–681
Dunning JB Jr, Stewart DJ, Danielson BJ, Noon BR, Root TL, Lamberson RH, Stevens EE (1995) Spatially explicit population models: current forms and future uses. Ecol Appl 5(1):3–11
Elliot NB, Cushman SA, Macdonald DW, Loveridge AJ (2014a) The devil is in the dispersers: predictions of landscape connectivity change with demography. J Appl Ecol 51(5):1169–1178
Elliot NB, Cushman SA, Loveridge AJ, Mtare G, Macdonald DW (2014b) Movements vary according to dispersal stage, group size, and rainfall: the case of the African lion. Ecology 95(10):2860–2869
Ellis RD, McWhorter TJ, Maron M (2012) Integrating landscape ecology and conservation physiology. Landscape Ecol 27(1):1–12
Fahrig L (2003) Effects of habitat fragmentation on biodiversity. Annu Rev Ecol Evol Syst 34(1):487–515
Farina A (2008) Principles and methods in landscape ecology: towards a science of the landscape (vol 3). Springer Science & Business Media, New York
Frank B, Glikman JA, Marchini S (eds) (2019) Human–wildlife interactions: turning conflict into coexistence (vol 23). Cambridge University Press, Cambridge
Gibbs JP (1998) Amphibian movements in response to forest edges, roads, and streambeds in southern New England. J Wildl Manag 62:584–589
Gorini L, Linnell JD, May R, Panzacchi M, Boitani L, Odden M, Nilsen EB (2012) Habitat heterogeneity and mammalian predator–prey interactions. Mammal Rev 42(1):55–77
Hargrove WW, Hoffman FM, Efroymson RA (2005) A practical map-analysis tool for detecting potential dispersal corridors. Landsc Ecol 20(4):361–373
Hearn AJ, Cushman SA, Ross J, Goossens B, Hunter LT, Macdonald DW (2018) Spatio-temporal ecology of sympatric felids on Borneo. Evidence for resource partitioning? PLoS ONE 13(7):e0200828
Heinrichs JA, Lawler JJ, Schumaker NH (2016) Intrinsic and extrinsic drivers of source–sink dynamics. Ecol Evol 6(4):892–904
Hilty JA, Lidicker WZ Jr, Merenlender AM (2012) Corridor ecology: the science and practice of linking landscapes for biodiversity conservation. Island Press, Washington, DC
Hodgetts T (2018) Connectivity as a multiple: in, with and as “nature.” Area 50(1):83–90
Hodgetts T, Lorimer J (2015) Methodologies for animals’ geographies: cultures, communication and genomics. Cult Geogr 22(2):285–295
Hodgetts T, Lorimer J (2020) Animals’ mobilities. Prog Hum Geogr 44(1):4–26
Holyoak M, Casagrandi R, Nathan R, Revilla E, Spiegel O (2008) Trends and missing parts in the study of movement ecology. Proc Natl Acad Sci 105(49):19060–19065
Hooks B (2001) All about love: new visions. Harper Perennial, New York
Ingold T (1993) The temporality of the landscape. World Archaeol 25(2):152–174
Ingold T (2000) The perception of the environment: essays on livelihood, dwelling and skill. Routledge, London
Ingold T (2011) Being alive: essays on movement, knowledge and description. Routledge, London
Jeltsch F, Bonte D, Pe’er G, Reineking B, Leimgruber P, Balkenhol N (2013) Integrating movement ecology with biodiversity research-exploring new avenues to address spatiotemporal biodiversity dynamics. Mov Ecol 1(1):1–13
Jennings MK, Zeller KA, Lewison RL (2020) Supporting adaptive connectivity in dynamic landscapes. Land 9(9):295
Johnson JT, Howitt R, Cajete G, Berkes F, Louis RP, Kliskey A (2016) Weaving Indigenous and sustainability sciences to diversify our methods. Sustain Sci 11(1):1–11
Kareiva PM, Shigesada N (1983) Analyzing insect movement as a correlated random walk. Oecologia 56(2):234–238
Kareiva P, Marvier M (2012) What is conservation science? Bioscience 62(11):962–969
Kaszta Ż, Cushman SA, Hearn AJ, Burnham D, Macdonald EA, Goossens B et al (2019) Integrating Sunda clouded leopard (Neofelis diardi) conservation into development and restoration planning in Sabah (Borneo). Biol Cons 235:63–76
Kaszta Ż, Cushman SA, Macdonald DW (2020) Prioritizing habitat core areas and corridors for a large carnivore across its range. Anim Conserv 23(5):607–616
Kaszta Ż, Cushman SA, Slotow R (2021) Temporal non-stationarity of path-selection movement models and connectivity: an example of African Elephants in Kruger National Park. Front Ecol Evol 9:207
Keeley AT, Beier P, Keeley BW, Fagan ME (2017) Habitat suitability is a poor proxy for landscape connectivity during dispersal and mating movements. Landsc Urban Plan 161:90–102
Kimmerer R (2013) Braiding sweetgrass: Indigenous wisdom, scientific knowledge and the teachings of plants. Milkweed Editions, Minneapolis
Levin SA (1992) The problem of pattern and scale in ecology: the Robert H. MacArthur award lecture. Ecology 73(6):1943–1967
Lewis MA, Maini PK, and Petrovskii SV (2013) Dispersal, individual movement and spatial ecology. Lecture notes in mathematics (mathematics bioscience series), 2071.
Lorimer J (2015) Wildlife in the Anthropocene: conservation after nature. University of Minnesota Press, Minnesota
Manly BFL, McDonald L, Thomas DL, McDonald TL, Erickson WP (2007) Resource selection by animals: statistical design and analysis for field studies. Springer Science & Business Media, New York
Mateo-Sánchez MC, Balkenhol N, Cushman S, Pérez T, Domínguez A, Saura S (2015a) A comparative framework to infer landscape effects on population genetic structure: are habitat suitability models effective in explaining gene flow? Landsc Ecol 30(8):1405–1420
Mateo-Sánchez MC, Balkenhol N, Cushman S, Pérez T, Domínguez A, Saura S (2015b) Estimating effective landscape distances and movement corridors: comparison of habitat and genetic data. Ecosphere 6(4):1–16
Mathur N (2021) Crooked cats: beastly encounters in the anthropocene. University of Chicago Press, Chicago
McGarigal K, Cushman S (2005) The gradient concept of landscape structure [Chapter 12]. In: Wiens JA, Moss MR (eds) Issues and perspectives in landscape ecology. Cambridge University Press, Cambridge, pp 112–119
McRae BH, Dickson BG, Keitt TH, Shah VB (2008) Using circuit theory to model connectivity in ecology, evolution, and conservation. Ecology 89(10):2712–2724
Moilanen A (2011) On the limitations of graph-theoretic connectivity in spatial ecology and conservation. J Appl Ecol 48:1543–1547
Moller H, Berkes F, Lyver POB, Kislalioglu M (2004) Combining science and traditional ecological knowledge: monitoring populations for co-management. Ecol Soc 9(3)
Nathan R, Getz WM, Revilla E, Holyoak M, Kadmon R, Saltz D, Smouse PE (2008) A movement ecology paradigm for unifying organismal movement research. Proc Natl Acad Sci 105(49):19052–19059
Hanh TN (1993) Transformation and healing: sutra on the four establishments of mindfulness. Rider, London
Ntuli H, Jagers SC, Linell A, Sjöstedt M, Muchapondwa E (2019) Factors influencing local communities’ perceptions towards conservation of transboundary wildlife resources: the case of the Great Limpopo Trans-frontier Conservation Area. Biodivers Conserv 28(11):2977–3003
Osipova L, Okello MM, Njumbi SJ, Ngene S, Western D, Hayward MW, Balkenhol N (2019) Using step-selection functions to model landscape connectivity for African elephants: accounting for variability across individuals and seasons. Anim Conserv 22(1):35–48
Paquet PC, Darimont CT (2010) Wildlife conservation and animal welfare: two sides of the same coin. Anim Welf 19(2):177–190
Parathian HE, McLennan MR, Hill CM, Frazão-Moreira A, Hockings KJ (2018) Breaking through disciplinary barriers: human–wildlife interactions and multispecies ethnography. Int J Primatol 39(5):749–775
Parreñas JS (2018) Decolonizing extinction. Duke University Press, Durham
Paltsyn MY, Gibbs JP, Mountrakis G (2019) Integrating traditional ecological knowledge and remote sensing for monitoring rangeland dynamics in the Altai Mountain region. Environ Manag 64(1):40–51
Patel R, Moore JW (2017) Cheap nature. In: A history of the world in seven cheap things: a guide to capitalism, nature, and the future of the planet. University of California Press
Penjor U, Astaras C, Cushman SA, Kaszta Ż, Macdonald DW (2022) Contrasting effects of human settlement on the interaction among sympatric apex carnivores. Proc R Soc B 289(1973):20212681
Peterson MN, Birckhead JL, Leong K, Peterson MJ, Peterson TR (2010) Rearticulating the myth of human–wildlife conflict. Conserv Lett 3(2):74–82
Pine R (2009) The Zen works of stonehouse: poems and talks of a 14th century Chinese Hermit.
Pinto N, Keitt TH (2009) Beyond the least-cost path: evaluating corridor redundancy using a graph-theoretic approach. Landsc Ecol 24(2):253–266
Pooley SP, Mendelsohn JA, Milner-Gulland EJ (2014) Hunting down the chimera of multiple disciplinarity in conservation science. Conserv Biol 28(1):22–32
Pooley S, Barua M, Beinart W, Dickman A, Holmes G, Lorimer J et al (2017) An interdisciplinary review of current and future approaches to improving human–predator relations. Conserv Biol 31(3):513–523
Powell RA, Mitchell MS (2012) What is a home range? J Mammal 93(4):948–958
Rayfield B, Fortin MJ, Fall A (2010) The sensitivity of least-cost habitat graphs to relative cost surface values. Landsc Ecol 25(4):519–532
Reddy PA, Puyravaud JP, Cushman SA, Segu H (2019) Spatial variation in the response of tiger gene flow to landscape features and limiting factors. Anim Conserv 22(5):472–480
Reding DM, Cushman SA, Gosselink TE, Clark WR (2013) Linking movement behavior and fine-scale genetic structure to model landscape connectivity for bobcats (Lynx rufus). Landsc Ecol 28(3):471–486
Rostro-García S, Tharchen L, Abade L, Astaras C, Cushman SA, Macdonald DW (2016) Scale dependence of felid predation risk: identifying predictors of livestock kills by tiger and leopard in Bhutan. Landsc Ecol 31(6):1277–1298
Rudnick D, Ryan SJ, Beier P, Cushman SA, Dieffenbach F, Epps C et al (2012) The role of landscape connectivity in planning and implementing conservation and restoration priorities. Issues Ecol 16:1–20
Salmón E (2000) Kincentric ecology: indigenous perceptions of the human–nature relationship. Ecol Appl 10(5):1327–1332
Schumaker NH (1996) Using landscape indices to predict habitat connectivity. Ecology 77:1210–1225
Schumaker NH, Brookes A (2018) HexSim: a modeling environment for ecology and conservation. Landsc Ecol 33(2):197–211
Schwartz MK, Copeland JP, Anderson NJ, Squires JR, Inman RM, McKelvey KS et al (2009) Wolverine gene flow across a narrow climatic niche. Ecology 90(11):3222–3232
Sekar N, Shiller D (2020) Engage with animal welfare in conservation. Science 369(6504):629–630
Sherub S, Fiedler W, Duriez O, Wikelski M (2017) Bio-logging, new technologies to study conservation physiology on the move: a case study on annual survival of Himalayan vultures. J Comp Physiol A 203(6):531–542
Shirk AJ, Wallin DO, Cushman SA, Rice CG, Warheit KI (2010) Inferring landscape effects on gene flow: a new model selection framework. Mol Ecol 19(17):3603–3619
Shirk AJ, Schroeder MA, Robb LA, Cushman SA (2015) Empirical validation of landscape resistance models: insights from the Greater Sage-Grouse (Centrocercus urophasianus). Landscape Ecol 30(10):1837–1850
Shirk AJ, Landguth EL, Cushman SA (2018) A comparison of regression methods for model selection in individual-based landscape genetic analysis. Mol Ecol Resour 18(1):55–67
Stronen AV, Schumaker NH, Forbes GJ, Paquet PC, Brook RK (2012) Landscape resistance to dispersal: simulating long-term effects of human disturbance on a small and isolated wolf population in southwestern Manitoba, Canada. Environ Monitor Assess 184(11):6923–6934
Thurfjell H, Ciuti S, Boyce MS (2014) Applications of step-selection functions in ecology and conservation. Mov Ecol 2(1):1–12
Tischendorf L, Fahrig L (2000) How should we measure landscape connectivity? Landscape Ecol 15(7):633–641
Tree I (2018) Wilding: the return of nature to a British farm. Pan Macmillan, UK
Unnithan Kumar S, Kaszta Ż, Cushman SA (2022a) Pathwalker: a new individual-based movement model for conservation science and connectivity modelling. ISPRS Int J Geo Inf 11(6):329
Unnithan Kumar S, Turnbull J, Hartman Davies O, Cushman SA, Hodgetts T (2022b) Minimal ecologies. http://www.digicologies.com/2022b/02/23/siddharth-unnithan-kumar-et-al/. Accessed 16 June 2022.
Unnithan Kumar S, Cushman SA (2022) Connectivity modelling in conservation science: a comparative evaluation. Under Review.
Vergara M, Cushman SA, Ruiz-González A (2017) Ecological differences and limiting factors in different regional contexts: landscape genetics of the stone marten in the Iberian Peninsula. Landsc Ecol 32(6):1269–1283
Wallach AD, Bekoff M, Batavia C, Nelson MP, Ramp D (2018) Summoning compassion to address the challenges of conservation. Conserv Biol 32(6):1255–1265
Wasserman TN, Cushman SA, Schwartz MK, Wallin DO (2010) Spatial scaling and multi-model inference in landscape genetics: Martes americana in northern Idaho. Landsc Ecol 25(10):1601–1612
Webster MS, Marra PP, Haig SM, Bensch S, Holmes RT (2002) Links between worlds: unraveling migratory connectivity. Trends Ecol Evol 17(2):76–83
Wiens JA (1989) Spatial scaling in ecology. Funct Ecol 3(4):385–397
Wilson AD, Wikelski M, Wilson RP, Cooke SJ (2015) Utility of biological sensor tags in animal conservation. Conserv Biol 29(4):1065–1075
Zeller KA, McGarigal K, Whiteley AR (2012) Estimating landscape resistance to movement: a review. Landsc Ecol 27(6):777–797
Zeller KA, McGarigal K, Beier P, Cushman SA, Vickers TW, Boyce WM (2014) Sensitivity of landscape resistance estimates based on point selection functions to scale and behavioral state: pumas as a case study. Landsc Ecol 29(3):541–557
Zeller KA, Lewsion R, Fletcher RJ, Tulbure MG, Jennings MK (2020) Understanding the importance of dynamic landscape connectivity. Land 9(9):303
Acknowledgements
Siddharth Unnithan Kumar would like to make the following acknowledgements. First, I thank Kayla Schulte for introducing me to Jonny Turnbull and helping me on my journey into the vibrant discipline of geography. I bow to Hannah Parkes, Sam Bickersteth and Sonakshi Srivastava for their generosity and hospitality; to my dear friends from the Nature, Society and Environmental Governance 2021/22 course for their beauty and kinship; to Katie Polkinghorne, for wild friendship and faith in love; to Allegra Wint, Hugo Shakeshaft, and my Sangha, for their cosmic love and wisdom; to David Abram, beloved teacher and friend; to Tara Brach and Jack Kornfield, for their heartfelt teachings; to Port Meadow, the landscape of my heart and the ground beneath my feet; to my dear family; and to our more-than-human earth which we all call home.
Funding
This research was funded by Pembroke College, Oxford; and by the Engineering and Physical Sciences Research Council grant number EP/R513295/1.
Author information
Authors and Affiliations
Contributions
Siddharth Unnithan Kumar led the writing of the manuscript. All authors provided substantial input to the discussions, writing and reviewing of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Conflict of interest
The authors declare no conflict of interest in this work.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Unnithan Kumar, S., Turnbull, J., Hartman Davies, O. et al. Moving beyond landscape resistance: considerations for the future of connectivity modelling and conservation science. Landsc Ecol 37, 2465–2480 (2022). https://doi.org/10.1007/s10980-022-01504-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10980-022-01504-x