
Abstract
We address a system of equations modeling a compressible fluid interacting with an elastic body in dimension three. We prove the local existence and uniqueness of a strong solution when the initial velocity belongs to the space \(H^{2+\epsilon }\) and the initial structure velocity is in \(H^{1.5+\epsilon }\), where \(\epsilon \in (0,1/2)\).
Similar content being viewed by others


1 Introduction
The objective of this paper is to establish the local-in-time existence of solutions for the free boundary fluid–structure interaction model under low regularity assumptions on the initial data. The model describes the interaction between a viscous compressible fluid and an elastic structure that is immersed in it. Mathematically, the dynamics of the fluid are governed by the compressible Navier–Stokes equations in the velocity and density variables \((u,\rho )\), while the elastic dynamics are described by a second-order elasticity equation (which is replaced by a wave equation for the sake of simplicity) in the vector variables \((w,w_{t})\) representing the displacement and velocity of the structure.
The interaction between the structure and the fluid is mathematically characterized by velocity and stress matching boundary conditions at the moving interface that separates the solid and fluid regions. Since the interface position evolves with time and is unknown a priori, this is a free-boundary problem. The problem is challenging due to the mismatch between parabolic and hyperbolic regularity, as well as the complexity of the stress-matching condition on the free boundary.
The local-in-time existence and well-posedness results for the fluid–structure interaction model have been extensively studied in the literature. In 2005, the authors of [18, 19] established the local-in-time existence and well-posedness for the incompressible model, using the Lagrangian coordinate system to fix the domain and the Tychonoff fixed point theorem to construct a solution, given an initial fluid velocity \(u_0 \in H^5\) and structural velocity \(w_1 \in H^3\). Subsequently, the papers [32, 33] provided a priori estimates for the local existence of solutions using direct estimates for the initial data, namely \(u_0 \in H^3\) and \(w_1 \in H^{5/2+r}\), where \(r \in (0, (\sqrt{2}-1)/2)\). The authors relied on the hidden regularity trace theorem for wave equations, established in [12, 38, 39, 42, 51, 53], as a key ingredient to obtain their result. Several works on wave-heat coupled systems on a non-moving domain have contributed to the understanding of the heat-wave interaction phenomena (cf. [2,3,4, 9, 10, 21, 35,36,37, 40]). Recently, Raymond and Vanninathan [50] obtained a sharp regularity result for the case when the initial domain is a flat channel. They studied the system in the Lagrangian coordinate setting and obtained local-in-time solutions for the 3D model, with the initial velocity \(u_0 \in H^{1+\alpha }\) and the initial structural velocity \(w_1 \in H^{1/2+\alpha +\beta }\), where \(\alpha \in (1/2, 1)\) and \(\beta > 0\). In [11], Boulakia, Guerrero, and Takahashi obtained a unique local-in-time solution for the general domain case, given the initial data \(u_0 \in H^2\) and \(w_1 \in H^{9/8}\).
The compressible model under consideration was first treated in [6], where the authors obtained the existence and uniqueness for the initial density \(\rho _0\) belonging to \(H^3\), the velocity \(u_0\) in \(H^4\), and the structure displacement and velocity \((w, w_t)\) in \(H^3\times H^2\). A similar result was later obtained by Kukavica and Tuffaha [34] with less regular initial data \((\rho _0, u_0, w_1) \in H^{3/2+r} \times H^3 \times H^{3/2+r}\), where \(r\in (0, (\sqrt{2} -1)/2)\). In [7], the existence of a regular global solution is proved for small initial data. In a recent work [8], the authors proved the existence of a unique local-in-time strong solution of the interaction problem between a compressible fluid and elastic structure for initial data \((\rho _0, u_0, w_1) \in H^3 \times H^6\times H^3\), where the elastic structure is modeled by the Saint-Venant Kirchhoff system. For some other works on fluid–structure models, cf. [1, 5, 13,14,15,16,17, 20, 22, 24,25,26,27,28,29,30,31, 40, 41, 44,45,49, 52, 54].
In this paper, we provide a natural proof of the existence of a unique local-in-time solution to the system under a low regularity assumptions \(u_{0} \in H^{2+\epsilon }\) and \(w_{1} \in H^{1.5+\epsilon }\), where \(\epsilon \in (0,1/2)\), in the case of the flat initial configuration. Our proof relies on a maximal regularity type theorem for the nonhomegeneous linear parabolic problem with Neumann type conditions on the fluid–structure interface, in addition to the hidden regularity theorems (cf. Lemmas 3.5–3.6) for the wave equation. The time regularity of the solution is obtained using the energy estimates, which, combined with the elliptic regularity, yield the spatial regularity of the solutions. An essential ingredient of the proof of the main results is a trace inequality
for functions which are Sobolev in the time variable and square integrable on the boundary (cf. Lemma 3.1 and (3.8) below). This is used essentially in the proof of the existence for the nonlinear parabolic-wave system, Theorem 5.4, and in the proof of the main result, Theorem 2.1. The construction of a unique solution for the fluid–structure problem is obtained via the Banach fixed point theorem. The scheme involves solving the nonlinear parabolic-wave system with the variable coefficients treated as a given forcing perturbations.
One of the essential difficulties in establishing the existence of solutions is that the constants in the inequality are inversely proportional to powers of time T, which poses a problem for establishing convergence of a fixed-point scheme for small time. The same issue with the growing constants also arises in the hidden regularity inequalities in Lemmas 3.5–3.6 for the wave equation. We overcome this difficulty by solving a modified system which is posed on the fixed time interval (0, 1]. As opposed to the velocity matching boundary condition (2.6) in the original fluid–structure interaction problem, we impose the integrated velocity matching boundary condition (5.13) on the unit time interval in the modified system. These two boundary conditions agree on a small time interval and thus the modified system agrees with the original system when restricted to a small time interval. In the integrated velocity matching boundary condition (5.13), an important ingredient is the cutoff function in time that depends on a variable time \(\tilde{T}\), which is then chosen to be less than a fixed time \(T_0\), allowing for contraction estimates on the solution map. Another major difficulty is the handling of the normal derivative of the elastic structure on the common boundary, which is estimated by appealing to the hidden trace regularity (see Lemma 3.6). The main issue with proving the fixed-point theorems (for the linear and nonlinear variants) is that time derivatives, which are frequently fractional, fall on the cutoff, showing that the constant dependence on \(\tilde{T}\) needs to be treated carefully.
Similarly, for the nonlinear system, treated in Sect. 6, we also need to modify the definition of the Lagrangian map and the variable coefficient matrix using a cutoff in time function to ensure similar contraction-type estimates on the solution map for the system with given variable coefficients. The solution in each iteration step is used to prescribe new variable coefficients for the next iteration step. The contracting property of the Navier-Stokes-wave system is maintained by taking a sufficiently short time \(\tilde{T}\) to ensure closeness of the Jacobian and the inverse matrix of the flow map to their initial states.
Note that the configuration we adopt, (2.8) with the periodic boundary conditions in the \(y_1\) and \(y_2\) directions, is needed only in Lemma 3.6. In these estimates, Sobolev time norms pose a particular challenge when the cutoff function is involved since they involve singular terms in \(\tilde{T}\) that have to be compensated by taking sufficiently high \(L^{p}\) norms of time derivatives of v.
The paper is structured as follows. In Sect. 2, we introduce the fluid–structure model and state our main result. Next, in Sect. 3, we present the trace inequality, interpolation, and hidden regularity lemmas. Section 4 provides the maximal regularity for the nonhomogeneous parabolic problem, which is a crucial ingredient in the proof of local existence for the nonlinear parabolic-wave system, discussed in Sect. 5. Finally, in Sect. 6, we prove our main result, Theorem 2.1, using the local existence result established in Sect. 5 and constructing a unique solution via the Banach fixed point theorem.
2 The Model and Main Results
We consider the fluid–structure problem for a free boundary system involving the motion of an elastic body immersed in a compressible fluid. Let \(\Omega _{\text{ f }}(t)\) and \(\Omega _{\text{ e }}(t)\) be the domains occupied by the fluid and the solid body at time t in \(\mathbb {R}^3\), whose common boundary is denoted by \(\Gamma _{\text{ c }}(t)\). The fluid is modeled by the compressible Navier–Stokes equations, which in Eulerian coordinates reads
where \(\rho = \rho (t,x) \in \mathbb {R}_+\) is the density, \(u = u(t,x) \in \mathbb {R}^3\) is the velocity, \(p = p(\rho (t,x)) \in \mathbb {R}_+\) is the pressure, and \(\lambda , \mu >0\) are physical constants. (We remark that the condition for \(\lambda \) and \(\mu \) can be relaxed to \(\lambda >0\) and \(3\lambda + 2\mu >0\).) The system (2.1)–(2.2) is defined on \(\Omega _{\text{ f }}(t)\) which set to \( \Omega _{\text{ f }}=\Omega _{\text{ f }}(0) \) and evolves in time. The dynamics of the coupling between the compressible fluid and the elastic body are best described in the Lagrangian coordinates. Namely, we introduce the Lagrangian flow map \(\eta (t,\cdot ) :\Omega _{\text{ f }}\rightarrow \Omega _{\text{ f }}(t)\) and rewrite the system (2.1)–(2.2) as
for \(j=1,2,3\), where \(R(t,x)= \rho ^{-1} (t, \eta (t,x))\) is the reciprocal of the Lagrangian density, \(v(t,x) = u(t, \eta (t,x))\) is the Lagrangian velocity, \(a(t,x)= (\nabla \eta (t,x))^{-1}\) is the inverse matrix of the flow map and q is a given function of the density. The system (2.3)–(2.4) is expressed in terms of Lagrangian coordinates and posed in a fixed domain \(\Omega _{\text{ f }}\).
On the other hand, the elastic body is modeled by the wave equation in Lagrangian coordinates, which is posed in a fixed domain \(\Omega _{\text{ e }}\) as
where \((w, w_t)\) are the displacement and the structure velocity. The interaction boundary conditions are the velocity and stress matching conditions, which are formulated in Lagrangian coordinates over the fixed common boundary \(\Gamma _{\text{ c }}= \Gamma _{\text{ c }}(0)\) as
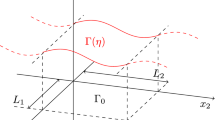
for \(j=1,2,3\), where \(J(t,x) = \det (\nabla \eta (t,x))\) is the Jacobian and \(\nu \) is the unit normal vector to \(\Gamma _{\text{ c }}\), which is outward with respect to \(\Omega _{\text{ e }}\). In the present paper, we consider the reference configurations \(\Omega = \Omega _{\text{ f }}\cup \Omega _{\text{ e }}\cup \Gamma _{\text{ c }}\), \(\Omega _{\text{ f }}\), and \(\Omega _{\text{ e }}\) given by (see Fig. 1)
where \(0<L_1<L_2 <L_3\) and \(\mathbb {T}^2\) is the two-dimensional torus with the side \(2\pi \). Thus, the common boundary is expressed as
while the outer boundary is represented by

Lagrangian domain to Eulerian domain
To close the system, we impose the homogeneous Dirichlet boundary condition
on the outer boundary \(\Gamma _{\text{ f }}\) and the periodic boundary conditions for w, \(\rho \), and u on the lateral boundary, i.e.,
Note that the inverse matrix of the flow map a satisfies the ODE system
where \(\mathbb {I}_3\) is the three-dimensional identity matrix, while the Jacobian satisfies the ODE system
The initial data of the system (2.3)–(2.5) is given as
where \(w_0 = 0\). For \(T>0\), we denote
with the corresponding norm
where \(r, s\ge 0\) are constant parameters. In Sects. 4–6, we shall work on a modified system with \(T=1\) to avoid issue with dependence of constants on small time. For simplicity of notation, we write
It is also convenient to abbreviate
where the domain of integration is \((0,1) \times \Omega _{\text{ f }}\) unless stated otherwise. Similarly, for the analogous space of functions defined on the boundary \(\Gamma _{\text{ c }}\), we write
and abbreviate
where the domain of integration is \((0,1)\times \Gamma _{\text{ c }}\) unless stated otherwise. We emphasize that the time domain of integration in the norms is (0, 1) when not indicated.
Our main result states the local-in-time existence of solution to the system (2.3)–(2.5) with the mixed boundary conditions (2.6)–(2.10) and the initial data (2.14).
Theorem 2.1
Let \(s\in (2, 2+ \epsilon _0]\) for \(\epsilon _0 \in (0,1/2)\). Assume that \(R_0 \in H^s (\Omega _{\text{ f }})\), \(R_0^{-1} \in H^s (\Omega _{\text{ f }})\), \(w_1 \in H^{s-1/2} (\Omega _{\text{ e }})\), \(v_0 \in H^s (\Omega _{\text{ f }})\), \(v_0 |_{\Gamma _{\text{ c }}} \in H^{s+1/2} (\Gamma _{\text{ c }})\), \(\partial _3 v_0 |_{\Gamma _{\text{ f }}} \in H^{s-1/2} (\Gamma _{\text{ f }})\), and \(w_0 = 0\), with the compatibility conditions
for \(j=1,2,3\). Then the system (2.3)–(2.5) with the coupling conditions (2.6)–(2.7), boundary conditions (2.9)–(2.10), and the initial data (2.14) admits a unique solution
for some constant \(T >0\), where the corresponding norms are bounded by a function of the norms of the initial data.
Remark 2.2
We assume \(v_0 \in H^s (\Omega _{\text{ f }})\) for \(s\in (2, 2+\epsilon _0]\) where \(\epsilon _0 >0\), since the elliptic regularity for \(\Vert v\Vert _{L^2_t H^4_x}\) in (4.29) requires that \(R^{-1} \in L^\infty ((0,T), H^2 (\Omega _{\text{ f }}))\). From the density equation (2.3), we deduce that the regularity for the initial velocity must be at least in \(H^2 (\Omega _{\text{ f }})\), showing the optimality of the range \(s\ge 2\). It would be interesting to find whether the statement of the theorem holds for the borderline case \(s=2\). \(\square \)
The proof of the theorem is given in Sect. 6 below. For simplicity, we present the proof for the pressure law \(q(R) = R\), noting that the case for smooth function q(R) follows completely analogously using the Sobolev and Hölder’s inequalities and (5.69). See Remark 5.5 below for necessary modifications.
3 Space-Time Trace, Interpolation, and Hidden Regularity Inequalities
In this section, we provide several auxiliary results needed in the fixed point arguments. The first lemma provides an estimate for the trace in a space-time norm and is an essential ingredient when constructing solutions to the nonlinear parabolic-wave system in Sect. 5 below.
Lemma 3.1
Let \(r>1/2\) and \(\theta \ge 0\). If \(u\in L^{2}((-\infty ,\infty ),H^{r}(\Omega _{\text{ f }})) \cap H^{2\theta r/(2r-1)} ((-\infty ,\infty ), L^{2}(\Omega _{\text{ f }}))\), then \( u \in H^{\theta } ((-\infty ,\infty ), L^{2}(\Gamma _{\text{ c }})) \), and for all \(\epsilon \in (0,1]\), we have the inequality
where \(C>0\) is a constant.
The above lemma was proven in [23], where moreover, the interpolation spaces were identified. Since in this paper, we only use the inequality (3.1), which allows a simpler proof, we provide an elementary argument below.
First, however, we point out a consequence when restricting the above result to a finite time interval.
Corollary 3.2
Let \(r>1/2\), \(\theta \ge 0\), and \(T>0\). If \(u\in L^{2}((0,T) ,H^{r}(\Omega _{\text{ f }})) \cap H^{2\theta r/(2r-1)} ((0,T), L^{2}(\Omega _{\text{ f }}))\), then \( u \in H^{\theta } ( (0,T), L^{2}(\Gamma _{\text{ c }})) \), and for all \(\epsilon \in (0,1]\), we have the inequality
where \(C>0\) is a constant, which depends on \(\Omega _{\text{ f }}\) and T.
The inequality (3.2) follows from Lemma 3.1 using the Sobolev extension operator. Clearly, the constant is uniform as \(T\rightarrow \infty \), but may increase to infinity as \(T\rightarrow 0\).
Proof of Lemma 3.1
It is sufficient to prove (3.2) for \(u\in C_{0}^{\infty }({{\mathbb {R}}} \times {{\mathbb {R}}}^3)\) with the trace taken on the set
the general case is settled by the partition of unity and straightening of the boundary. Since it should be clear from the context, we usually do not distinguish in notation between a function and its trace. Denoting by \({\hat{u}}\) the Fourier transform of u with respect to \((t, x_1,x_2,x_3)\), we have
Denote by
the quotient between the exponents r and \(2\theta r/(2r-1)\) in (3.2). Then, with \(\lambda >0\) to be determined below, we have
where we used the Cauchy-Schwarz inequality in \(\xi _3\). Using a substitution, we have
provided \(\lambda \) satisfies \( 2 \gamma \lambda >1 \), which is by (3.3) equivalent to
Note that \(2\gamma \lambda >1\) implies \(1/\gamma -2\lambda <0\) for the exponent of A in (3.4). Now we use (3.4) for the integral in \(\xi _3\) with \(A=(1+(\xi ^{2}_{1}+ \xi ^{2}_{2})^{\gamma }+ \tau ^{2})^{1/2}\), while noting that
provided \( \lambda -{1}/{2\gamma }\le \theta \), i.e.,
Under the condition (3.6), we thus obtain
for all \(\epsilon \in (0,1]\). Using (3.3), we get
for all \(\epsilon \in (0,1]\). Finally, note that \(\lambda =2r\theta /(2r-1)\) satisfies (3.5)–(3.6) under the condition \(r>1/2\).
Optimizing \(\epsilon \in (0,1]\) in (3.7) by using
we obtain a trace inequality
which is a more explicit version of (3.1). Note that from (3.8), one may obtain an inequality on the interval (0, T) with a T-dependent constant.
The second lemma provides a space-time interpolation inequality which is needed in several places in Sects. 5 and 6 below.
Lemma 3.3
Let \(\alpha ,\beta >0\). If \(u\in H^{\alpha }((-\infty , \infty ),L^2(\Omega _{\text{ f }})) \cap L^2((-\infty , \infty ), H^{\beta }(\Omega _{\text{ f }}))\), then we have that \( u \in H^{\theta } ((-\infty , \infty ), H^{\lambda }(\Omega _{\text{ f }})) \) for all \(\theta \in (0,\alpha )\) and \(\lambda \in (0,\beta )\) such that
In addition, for all \(\epsilon \in (0,1]\), we have the inequality
where \(C>0\) is a constant.
This statement immediately implies the following one regarding the same type of interpolation inequality on a finite time interval.
Corollary 3.4
Let \(\alpha ,\beta >0\) and \(T>0\). If \(u\in H^{\alpha }( (0,T),L^2(\Omega _{\text{ f }})) \cap L^2((0,T), H^{\beta }(\Omega _{\text{ f }}))\), then we have that \( u \in H^{\theta } ((0,T), H^{\lambda }(\Omega _{\text{ f }})) \) for all \(\theta \in (0,\alpha )\) and \(\lambda \in (0,\beta )\) such that
In addition, for all \(\epsilon \in (0,1]\), we have the inequality
where \(C>0\) is a constant depending on \(\Omega _{\text{ f }}\) and T.
As above, Corollary 3.4 follows by employing a Sobolev extension operator in the t variable.
Proof of Lemma 3.3
Using a partition of unity, straightening of the boundary, and a Sobolev extension, it is sufficient to prove the inequality in the case \(\Omega _{\text{ f }}={{\mathbb {R}}}^3\) and \(u\in C_{0}^{\infty }({\mathbb R}\times {{\mathbb {R}}}^3)\). Then, using Parseval’s identity and the definition of the Sobolev norms, we only need to prove
for \(\tau \in {{\mathbb {R}}}\) and \(\xi \in {{\mathbb {R}}}^{n}\), where \(\epsilon \in (0,1]\). Finally, (3.9) follows from the Young’s inequality.
In the last part of this section, we address the regularity for the wave equation. We first recall the hidden regularity result for the wave equation
and the initial data
(cf. [42]).
Lemma 3.5
[42] Assume that \((w_{0},w_{1}) \in H^{\beta }( \Omega _{\text{ e }})\times H^{\beta -1}( \Omega _{\text{ e }})\), where \(\beta \ge 1\), and
with the compatibility conditions \(\psi |_{t=0} = w_0|_{\Gamma _{\text{ c }}}\) and \(\partial _t \psi |_{t=0} = w_1 |_{\Gamma _{\text{ c }}}\). Then there exists a solution \((w, w_{t}) \in C([0,T],H^{\beta }( \Omega _{\text{ e }}) \times H^{\beta -1}( \Omega _{\text{ e }}))\) of (3.10)–(3.13), which satisfies the estimate
where the implicit constant depends on \(\Omega _{\text{ e }}\) and T.
In the final lemma of this section, we recall an essential trace regularity result for the wave equation from [50].
Lemma 3.6
[50] Assume that \((w_0, w_1) \in H^{\beta } (\Omega _{\text{ e }}) \times H^{\beta +1} (\Omega _{\text{ e }})\), where \(0<\beta <5/2\), and
with the compatibility condition \(\partial _t \psi |_{t=0} = w_1 |_{\Gamma _{\text{ c }}}\). Then there exists a solution w of (3.10)–(3.13) such that
where the implicit constant depends on \(\Omega _{\text{ e }}\) and T.
4 The Nonhomogeneous Parabolic Problem
In this section, we consider the parabolic problem
with the nonhomogeneous boundary conditions and the initial data
for \(j=1,2,3\). To state the maximal regularity for (4.1)–(4.5), we consider the homogeneous version when (4.2)–(4.5) is replaced by
for \(j=1,2,3\).
Lemma 4.1
Assume that \(f\in K^{2}((0,1)\times \Omega _{\text{ f }})\) with \(f(0, \cdot ) = 0\) on \(\Omega _{\text{ f }}\) and
Then the parabolic problem (4.1) with the boundary conditions and the initial data (4.6)–(4.9) admits a solution u satisfying
and
where the implicit constants depend on the norms of \(R\) and \(R^{-1}\) in (4.10).
Proof
Analogously to [43, Theorem 3.2], the parabolic problem (4.1) admits a solution \(u\in K^2((0,1) \times \Omega _{\text{ f }})\) if \(f \in K^0((0,1) \times \Omega _{\text{ f }})\) and \(u \in K^4((0,1) \times \Omega _{\text{ f }})\) if \(f \in K^2((0, 1) \times \Omega _{\text{ f }})\). Below, the norm of dependence on time and space are understood as (0, 1) and \(\Omega _{\text{ f }}\), unless stated otherwise. In the reminder of the proof we shall prove the regularity. Taking the \(L^2\)-inner product of (4.1) with u, we arrive at
For the second and third terms on the left side of (4.13), we integrate by parts with respect to \(\partial _k\) and \(\partial _j\) respectively to get
and
Inserting (4.14)–(4.15) into (4.13) and appealing to (4.6)–(4.7), we get
where the last inequality follows from Hölder’s and Young’s inequalities. Note that for any \(v \in H^1(\Omega _{\text{ f }})\), using the Sobolev and Young’s inequalities, we have
for any \(\epsilon \in (0,1]\), where \(C_\epsilon >0\) denotes a constant depending on \(\epsilon \). We integrate (4.16) in time from 0 to t and use
obtaining
for any \(\epsilon , \bar{\epsilon } \in (0,1]\), where we used (4.17) and the Young’s inequality. For the second term on the left, we use Korn’s inequality, which reads
From (4.19)–(4.20) it follows that
by choosing suitable \(\epsilon , \bar{\epsilon }>0\). By Gronwall’s inequality, we obtain
where we used \(e^{C t}\lesssim 1\) for \(t\le 1\), and then, after using (4.22) in (4.21), we arrive at
Next, we take the \(L^2\)-inner product of (4.1) with \(u_t\), obtaining
Then, proceeding as in (4.14)–(4.15), we get
and
Inserting (4.25)–(4.26) into (4.24) appealing to (4.6)–(4.7), and using
we arrive at
for any \(\epsilon \in (0,1]\), where we used Hölder’s and Young’s inequalities. Integrating in time from 0 to t and using the Young, Sobolev, and Korn’s inequalities with (4.17)–(4.18), we get
for any \(\epsilon , \bar{\epsilon }, \tilde{\epsilon } \in (0,1]\), where we used \(\Vert u (0) \Vert _{H^1} = 0\) in the last inequality by (4.9). For the space regularity, note that u is the solution of the elliptic problem
with the boundary conditions
for \(j=1,2,3\). From the elliptic regularity for (4.29)–(4.31) it follows that
from where
Combining (4.22)–(4.23), (4.28), and (4.33), we obtain
by taking suitable \(\epsilon , \bar{\epsilon }, \tilde{\epsilon }>0\). Using Gronwall’s inequality, we arrive at
and thus (4.34) implies
where we used \(e^{C t}\lesssim 1\) for \(t\le 1\). From (4.33) and (4.35) it follows that
completing the proof of (4.11).
Differentiating (4.1) in time and taking the \(L^2\)-inner product with \(u_t\), we arrive at
We proceed as in (4.14)–(4.15) to obtain
and
Inserting (4.37)–(4.38) into (4.36), we get
where we used Young’s, Hölder’s, and Sobolev inequalities. Integrating in time from 0 to t and using the Young’s and Korn’s inequalities and (4.17)–(4.18), we obtain
for any \(\epsilon , \bar{\epsilon } \in (0,1]\), since \(\Vert u_t (0)\Vert _{L^2} = \Vert f(0)\Vert _{L^2} =0\). From (4.32) and (4.35) it follows that
by taking appropriate \(\epsilon , \bar{\epsilon } >0\), where we also used
in the last inequality. Appealing to Gronwall’s inequality, (4.39) implies
and then, after using (4.41) in (4.39), we arrive at
Differentiating (4.1) in time and taking the \(L^2\)-inner product with \(u_{tt}\), we obtain
where we integrated by parts in spatial variables. We proceed as in (4.36)–(4.39) to get
for any \(\epsilon , \bar{\epsilon }, \tilde{\epsilon } \in (0,1]\), where we used the Young’s, Hölder, Sobolev, and Korn’s inequalities. Note that \(u_t\) is the solution of the elliptic problem
with the boundary conditions
for \(j=1,2,3\). The elliptic regularity implies that
where we used Hölder’s inequality. From (4.41)–(4.44), we obtain
by taking \(\epsilon , \bar{\epsilon }, \tilde{\epsilon }>0\) sufficiently small, where we used (4.40). Appealing to Gronwall’s inequality, we arrive at
whence
From the \(H^4\) regularity of the elliptic problem (4.29)–(4.31) and (4.44) it follows that
since \(H^2\) is an algebra. We combine (4.41) and (4.45)–(4.46) to get
completing the proof of (4.12). \(\square \)
The following lemma provides a maximal regularity for the parabolic system (4.1)–(4.5).
Lemma 4.2
Let \(s\in (2, 2+\epsilon _0]\), where \(\epsilon _0 \in (0,1/2)\) is arbitrary. Assume the compatibility conditions
for \(j=1,2,3\). Suppose that
and
with the nonhomogeneous terms satisfying
Then the system (4.1)–(4.5) admits a solution u satisfying
where the implicit constant depends on the norms of \(R\) and \(R^{-1}\) in (4.49).
Proof
In order to apply a lifting result in [43], we consider the boundary conditions
for \(j=1,2,3\), and the initial data
Below, the norm of dependence on time and space are understood as (0, 1) and \(\Omega _{\text{ f }}\), unless stated otherwise. From [43, Theorem 2.3] and the compatibility conditions (4.47)–(4.48) and since \(s>1/2\) it follows that there exists \(v \in K^{s+1} ((0,1)\times \Omega _{\text{ f }})\) satisfying the boundary conditions and initial conditions (4.53)–(4.61) with
from where
Now we consider the homogeneous parabolic problem
with the homogeneous boundary conditions and the initial data
for \(j=1,2,3\), where
Note that (4.61) implies that
By (4.49), (4.69), and Lemma 4.1, there exists a solution w to the system (4.63)–(4.68) satisfying
and
where the implicit constants depend on the norms of \(R\) and \(R^{-1}\) in (4.49). From [43, Theorem 6.2] and (4.70)–(4.71) it follows that
since \(s \notin 1/2 + \mathbb {Z}\) and \(s/2 \notin \mathbb {Z}\). From (4.68), we get
For the second term on the right side of (4.73), we obtain
where we used Corollary 3.4. To treat the last term on the right side of (4.73), we claim that
on the domain \((0,1)\times \Omega _{\text{ f }}\). Using extensions, we may assume that the domain is actually \(\mathbb {R}\times \mathbb {R}^{3}\). From the Hölder inequality it follows that
since \(2<s<5/2\). The claim (4.74) is thus completed by appealing to the Sobolev inequality. For the last term on the right side of (4.73), we use the Hölder’s inequality, yielding
and
where we appealed to (4.74) and Corollary 3.4. Note that from (4.63)–(4.68), we infer that the difference \(u=v-w\) is a solution of the system (4.1)–(4.5). From (4.62), (4.72)–(4.73), and (4.75) it follows that
concluding the proof of (4.52). \(\square \)
5 Solution to a Parabolic-Wave System
In this section, we consider the coupled parabolic-wave system
with the boundary conditions
for \(j =1,2,3\), and the initial data
In order to avoid issues of dependence of constants for small time, we introduce a cutoff function in time and work on the unit time interval (0, 1). Let \(\tilde{T}\in (0,1/4)\), and let \(\phi _{\tilde{T}} (t)\) be a smooth cutoff function valued in [0, 1] such that
and \(\Vert \phi _{\tilde{T}}' \Vert _{L^\infty (0,1)} \lesssim 1 /\tilde{T}\). The following lemma provides a necessary estimate for the cutoff function.
Lemma 5.1
We have \(\Vert \phi _{\tilde{T}} \Vert _{ H^{(s-2)/2}_t} \lesssim 1\).
Proof of Lemma 5.1
By the Sobolev interpolation inequality, we have
since \(s<3.\)
To obtain the existence of solutions and avoid issues with the dependence of constants for small time, we replace (5.1)–(5.3) and (5.4)–(5.7) with
with the boundary conditions
for \(j =1,2,3\), where \(\phi _{\tilde{T}} (t)\) is as in (5.9). Note that from (5.13) it follows that
and thus the boundary condition (5.17) agrees with (5.4) on the time interval \([0,\tilde{T}]\), and the solutions of (5.10)–(5.16) agree with the solution of (5.1)–(5.7) on the time interval \([0,{\tilde{T}}]\), with the same initial and boundary conditions (5.8).
To provide the maximal regularity for the system (5.10)–(5.16), we state the following necessary a priori density estimates.
Lemma 5.2
Let \(s\in (2, 2 + \epsilon _0]\), where \(\epsilon _0 \in (0,1/2)\) is arbitrary. Consider the ODE system
Assume that \( (R_0, R_0^{-1}, v_0) \in H^s (\Omega _{\text{ f }}) \times H^s (\Omega _{\text{ f }}) \times H^s (\Omega _{\text{ f }}) \) and \(\Vert v\Vert _{K^{s+1} ((0,1)\times \Omega _{\text{ f }})} \le M\), where \(M\ge 1\). Let \(\delta \in (0,1/2)\). Then for a sufficiently small constant \(\tilde{T}>0\), depending on M and \(\delta \), we have
-
(i)
\(\Vert R\Vert _{L^\infty _t L^\infty _x} +\Vert R^{-1} \Vert _{L^\infty _t L^\infty _x}+ \Vert R\Vert _{L^\infty _t H^s_x} + \Vert R^{-1} \Vert _{L^\infty _t H^s_x} \lesssim 1\),
-
(ii)
\(\Vert R^{-1}\Vert _{H^1_t H^{3/2+\delta }_x} +\Vert R\Vert _{H^1_t H^{3/2+\delta }_x} \lesssim 1\),
-
(iii)
\( \Vert R\Vert _{H^1_t H^s_x} \lesssim M\),
where the norm of dependence is \((0,1) \times \Omega _{\text{ f }}\).
We emphasize that the implicit constants in the above inequalities (i)–(iii) are independent of M and \(\delta \).
Proof of Lemma 5.2
(i) The solution of the ODE system (5.18)–(5.19) reads
Let \({\tilde{T}}\in (0,T]\) be a small time to be determined below. From Hölder’s and Sobolev inequalities it follows that
and
for some sufficiently small \(\tilde{T}>0\). Similarly, we have
and
(ii) From (5.18), we use Hölder’s and the Sobolev inequalities to get
Recall that for any \(0<r<r'\) and \(f \in H^{r'}\), we have the Sobolev interpolation inequality
for any \(\epsilon \in (0,1]\). From (5.21)–(5.22) it follows that
since \(s>2\). Taking \(\epsilon =1/M\) in (5.23), we arrive at
for some sufficiently small \(\tilde{T}>0\). Similarly, we have
Thus, we conclude the proof of (ii) by combining (i).
(iii) From (5.18) and Hölder’s inequality it follows that
Therefore, we conclude the proof of (iii).
The following lemma provides necessary estimates for the structure displacement and velocity on the boundary.
Lemma 5.3
Let \(s\in (2, 2 + \epsilon _0]\), where \(\epsilon _0 \in (0,1/2)\) is arbitrary. Assume that \(\Vert v\Vert _{K^{s+1} ((0,1)\times \Omega _{\text{ f }})} \le M\) for some \(M\ge 1\). Suppose that v and w satisfy (5.13) and (5.15) with the initial data satisfying \( (v_0, w_0, w_1) \in H^s(\Omega _{\text{ f }}) \times H^{s+ 1/2} (\Omega _{\text{ e }}) \times H^{s-1/2} (\Omega _{\text{ e }}) \) and \(v_0 |_{\Gamma _{\text{ c }}} \in H^{s+1/2} (\Gamma _{\text{ c }})\). Then we have
-
(i)
\(\Vert w \Vert _{L^2_t H_x^{s+1/2} ( \Gamma _{\text{ c }})} \lesssim \tilde{T}^{1/2} M +1\),
-
(ii)
\( \Vert w_t\Vert _{H^{s/2-3/4}_t H^{s/2+1/4}_x ( \Gamma _{\text{ c }})} + \Vert w \Vert _{H^{s/2-3/4}_t H_x^{s/2+1/4} (\Gamma _{\text{ c }})} \lesssim (\epsilon + \tilde{\epsilon } C_\epsilon + C_{\tilde{\epsilon }, \epsilon } \tilde{T}^{1/2}) M + C_\epsilon \),
-
(iii)
\(\Vert w\Vert _{H^{s/2+3/4}_t L^2_x (\Gamma _{\text{ c }})} \lesssim (\epsilon + \tilde{\epsilon } C_\epsilon + C_{\epsilon , \tilde{\epsilon }} \tilde{T}^{1/2}) M + C_\epsilon \),
for any \(\epsilon , \tilde{\epsilon } \in (0,1]\), where the implicit constants depend on the initial data.
Here and below, when not indicated, the time and space domains are understood to be (0, 1) and \(\Omega _{\text{ f }}\), respectively.
Proof of Lemma 5.3
(i) Using (5.13) we get
since \(v_0|_{\Gamma _{\text{ c }}} \in H^{s+1/2} (\Gamma _{\text{ c }})\), where we also used that for every \(t\in [0,1]\) we have
(ii) We use the Sobolev interpolation and Young inequalities to write
for any \(\epsilon \in (0,1]\).
Note that the implicit constant in the first inequality is independent of \(\tilde{T}\) since the interpolation is applied on a fixed domain \((0,1)\times \Gamma _{\text{ c }}\). For the term \(\mathcal {I}_1\), we use (5.17), the trace inequality, and the Leibniz rule, to obtain
The term \(\mathcal {I}_{11}\) is estimated using the Sobolev and Hölder inequalities as
where we used
in the second inequality and Corollary 3.4 in the last. Next, the terms \(\mathcal {I}_{12}\) and \(\mathcal {I}_{13}\) are estimated as
and
For the term \(\mathcal {I}_2\), we use (5.17), (5.22), and the trace inequality to get
where the last inequality follows from the identity \( (-4s^2+16s-7)/(14-4s) +1/2 =s \). Using the Sobolev interpolation inequality, we get
for any \(\tilde{\epsilon } \in (0,1]\). Combining (5.25)–(5.31), we arrive at
For the second term on the left side of (ii), we proceed as in (5.25), obtaining
since \(1/2\le (2s+5)/(14-4s)\). Note that \((2s+5)/(14-4s)<s+1/2\) for \(2<s<5/2\). Thus, using (5.22) and (5.24), we obtain
for any \(\epsilon \in (0,1]\).
(iii) First, we write
for any \(\epsilon \in (0,1]\), where the last inequality follows from (5.24). Note that the implicit constant in the second inequality is independent of \(\tilde{T}\) since the interpolation is performed on \((0,1)\times \Gamma _{\text{ c }}\). From (5.17) it follows that
For the first term on the far right side of (5.34), we use (5.35) and obtain
where the last inequality follows from (5.27) and Corollary 3.4. For the second term on the far right side of (5.34), we use (5.17) to arrive at
for any \(\tilde{\epsilon } \in (0,1]\), where we used the trace inequality and (5.22). The proof of (iii) is concluded by combining (5.34) and (5.36)–(5.37).
The following theorem provides the local existence for the parabolic-wave system (5.10)–(5.16).
Theorem 5.4
Let \(s\in (2, 2+\epsilon _0]\), where \(\epsilon _0 \in (0, 1/2)\). Assume the compatibility conditions
for \(j=1,2,3\). Suppose that the initial data satisfy
and
with the nonhomogeneous terms satisfying
Then there exists a unique solution
to the system (5.10)–(5.16), where \(\tilde{T}>0\) is a constant and the corresponding norms are bounded by a function of the initial data and the nonhomogeneous terms.
Let
where \(M\ge 1\) is a constant to be determined below. For \(v\in \mathcal {Z}\), define \(R\) by (5.20). Next, we solve the wave equation (5.12) for w with the boundary condition (5.13) and the initial data \((w, w_t) (0) = (w_0, w_1)\) in \(\Omega _{\text{ e }}\). With \((R, w)\) constructed this way, we define a mapping
where \(\bar{v}\) is the solution of the nonhomogeneous parabolic problem
with the boundary conditions and the initial data
for \(j=1,2,3\). We shall prove below that \(\Lambda \) is a contraction mapping and then use the Banach fixed-point theorem.
5.1 Uniform Boundedness of the Iterative Sequence
In this section, we show that the mapping \(\Lambda \) is well-defined from \(\mathcal {Z}\) to \(\mathcal {Z}\), for some sufficiently large constant \(M\ge 1\). Let \(\tilde{T}\in (0, 1/4)\) be a constant. We emphasize that the implicit constants in this section below depend on the initial data but are independent of M and \(\tilde{T}\). Denote the right side of (5.41)\(_1\) by \(\tilde{h}_j\). One may easily verify that
by (5.38)\(_3\). From (5.38)\(_2\), (5.42), Lemma 4.2, and Lemma 5.2, it follows that
from where
Here and below, when not indicated, the time and space domains are understood to be (0, 1) and \(\Omega _{\text{ f }}\), respectively.
For the space component of the first term on the right side of (5.43), we appeal to Lemma 3.6 to obtain
From (5.44) and Lemma 5.3 it follows that
for any \(\epsilon , \tilde{\epsilon }\in (0,1]\). For the time component of the first term on the right side of (5.43), we use Lemma 3.5 to get
For the third term on the right side of (5.46), we appeal to (5.24) to get
since \(s/2+3/4 \le s+1/2\). Applying Lemma 5.3 and (5.47) in (5.46), we get
for any \(\epsilon , \tilde{\epsilon }\in (0,1]\).
For the space component of the second term on the right side of (5.43), we use the Hölder’s and the Sobolev inequalities to obtain
where we appealed to Lemma 5.2. For the time component, we use Hölder’s and the Sobolev inequalities with Lemma 5.2 to obtain
For the space component of the third term on the right side of (5.43), we use the trace inequality to obtain
where the last inequality follows from Lemma 5.2. For the time component, we proceed analogously to (5.50), obtaining
since \(s\le 5/2\).
For the last term on the right side of (5.43), we proceed analogously as in (5.49), obtaining
Combining (5.43), (5.45), and (5.48)–(5.53), we arrive at
for any \(\epsilon , \tilde{\epsilon } \in (0,1]\). Taking appropriate \(\epsilon \), \(\tilde{\epsilon }\), and \(\tilde{T}>0\) (first \(\epsilon \) sufficiently small, then \(\tilde{\epsilon }\) sufficiently small depending on \(\epsilon \), and then \(\tilde{T}\) sufficiently small, depending on \(\epsilon \) and \(\tilde{\epsilon }\)), we get
by allowing \(M\ge 1\) sufficiently large.
Thus, we have shown that the mapping \(\Lambda :v\mapsto \bar{v}\) is well-defined from \(\mathcal {Z}\) to \(\mathcal {Z}\) and satisfies (5.54) for some \(M\ge 1\), which depends on the size of the initial data and nonhomogeneous terms.
5.2 Contracting Property
In this section, we prove
where \(M\ge 1\) is fixed as in (5.54) and \(\tilde{T}>0\) is a sufficiently small constant as in the previous section, which is further restricted below. We emphasize that the implicit constants below are allowed to depend on M.
Proof of Theorem 5.4
Let \(v_1, v_2 \in \mathcal {Z}\). Let \((R_1, \xi _1, \xi _{1t}, \bar{v}_1)\) and \((R_2, \xi _2, \xi _{2t}, \bar{v}_2)\) be the corresponding solutions of (5.18)–(5.19), (5.12)–(5.13), and (5.40)–(5.41) with the same initial data \((R_0, w_0, w_1, v_0)\) and the same nonhomogeneous terms (f, h). We denote \(\tilde{V} = \bar{v}_1 - \bar{v}_2\), \(\tilde{v}= v_1 - v_2\), \(\tilde{R} = R_1-R_2\), and \(\tilde{\xi } = \xi _1 - \xi _2\). The difference \(\tilde{V}\) satisfies
with the boundary conditions and the initial data
for \(j= 1,2,3\), where
Note that \( g(0)=0 \). We proceed as in (5.43) to obtain
where the last inequality follows from (5.56) and \( - R_1 \nabla R_1^{-1} + R_2 \nabla R_2^{-1} = R_1^{-1} \nabla {\tilde{R}} - R_{1}^{-1} R_{2}^{-1} {\tilde{R}}\nabla R_2 \). The difference \(\tilde{\xi }\) satisfies the wave equation
with the boundary condition and the initial data
For the first term on the right side of (5.57), we proceed as in (5.44)–(5.48) to obtain
for any \(\epsilon , \tilde{\epsilon } \in (0,1]\).
Since the difference \(\tilde{R}\) satisfies the ODE system
the solution is given by
For the second term on the right side of (5.57), we obtain
where we used Hölder’s inequality and Lemma 5.2, and then from (5.61) it follows that
where we used the Cauchy-Schwarz inequality. For the time component (note that \(s/2-1/4\le 1\)), we have
for any \(\epsilon \in (0,1]\), where we used Hölder’s inequality, Lemma 5.2, (5.59), and (5.61), as well as \( \Vert \tilde{R} \Vert _{L^\infty _t H^s_x} \lesssim \tilde{T}^{1/2} \Vert \tilde{v} \Vert _{L^2_t H^{s+1}_x} \). Note that \(\Vert \tilde{R} R_1^{-1} R_2^{-1} \nabla R_2 \Vert _{L^2_t L^2_x}\) does not need to be estimated since it is dominated by (5.63). Similarly, the third term on the right side of (5.57) is estimated as
and for the time component
Again, the term \(\Vert R_1 \nabla \tilde{R} \Vert _{L^2_t L^2_x}\) is dominated by (5.65). Regarding the fourth term on the right side of (5.57), we use Corollary 3.4 to obtain
To treat \(\Vert \tilde{R} D_x^2 \bar{v}_2 \Vert _{H^{(s-1)/2}_t L^2_x}\), we claim that for any \(\alpha >1/2\) and \(\delta >0\), we have
on the domain \((0,1)\times \Omega _{\text{ f }}\). Using extensions, we may assume that the domain is actually \(\mathbb {R}\times \mathbb {R}^{3}\). Then
since \(\alpha >1/2\), and (5.68) follows. Using (5.68), we then write
where we used Corollary 3.4 in the last inequality. From (5.22) and (5.59), it follows that
for any \(\epsilon \in (0,1]\), since \(s>2\). Combining (5.70) and (5.71), we arrive at
For the last term on the right side of (5.57), we use the trace inequality and arrive at
and
since \(s\le 5/2\). For the first term on the right side of (5.74), we proceed as in (5.64) to obtain
The second term on the right side of (5.74) is estimated analogously to (5.73), and we get
Applying the above estimates in (5.57), we obtain
for any \(\epsilon , \tilde{\epsilon } \in (0,1]\). Taking appropriate \(\epsilon \), \(\tilde{\epsilon }\), and \(\tilde{T}>0\) (first \(\epsilon \) sufficiently small, then \(\tilde{\epsilon }\) sufficiently small depending on \(\epsilon \), and then \(\tilde{T}\) sufficiently small, depending on \(\epsilon \) and \(\tilde{\epsilon }\)), we conclude the proof of (5.55). Thus, the mapping \(\Lambda \) is a contraction from \(\mathcal {Z}\) to \(\mathcal {Z}\). Using the Banach fixed point theorem, there exists a unique solution \(v \in \mathcal {Z}\) such that \(\Lambda (v) = v\) and which also satisfies (5.54) for some \(M\ge 1\).
Now we fix the constant \(\tilde{T}>0\) as above. Using Lemma 3.5, we have the interior regularity estimate
For the last term on the right side, we appeal to (5.17), yielding
For the first term on the far right side of (5.78), we appeal to Corollary 3.2 and Sobolev inequality to get
since \(s\le 2+2\epsilon _0\). From (5.24) and (5.77)–(5.79), it follows that
where \(C>0\) is a constant. By (5.80) and Lemma 5.2, there exists a unique solution
to the system (5.10)–(5.16), with the corresponding norms bounded by a function of the initial data and the nonhomogeneous terms. \(\square \)
Remark 5.5
As pointed out at the end of Sect. 2, the approach extends to more general pressure laws. For general equation of state q(r), we assume that q(r) is smooth such that \(q(0)=0\) and \(q(r_1) - q(r_2) = (r_1 -r_2) \tilde{q}(r_1, r_2)\) for any \(r_1\) and \(r_2\), where \(\tilde{q}\) is a smooth function. We shall briefly outline the modifications needed for this general pressure law. In Sect. 5.1, we have \(\Vert R \nabla (q(R^{-1})) \Vert _{K^{s-1}}\) instead of the second term on the right side of (5.43). For the space component, we use the Hölder and Sobolev inequalities to get
where the last inequality follows from (5.49). For the time component, we appeal to (5.69), yielding
where we used Lemma 5.2 and (5.50) in the last inequality. The third term on the right side of (5.43) is replaced by \(\Vert q(R^{-1})\Vert _{K^{s-1/2}_{\Gamma _{\text{ c }}}}\), which can be estimated in a similar fashion. In Sect. 5.2, the first two terms on the right side of (5.56) are replaced by \(-R_1 \nabla (q( R_1^{-1} ))+ R_2 \nabla (q( R_2^{-1} ))\) and the \(K^{s-1}\) norm can be estimated using the structural assumption on q(r). \(\square \)
6 Solution to the Navier–Stokes-Wave System
In this section, we provide the local existence for the coupled Navier-Stokes-wave system (2.3)–(2.5) with the boundary conditions (2.6)–(2.10) and the initial data (2.14). Let \(v\in \mathcal {Z}\) where \(\mathcal {Z}\) is as in (5.39), with constant \(M\ge 1\) to be determined below. Let \(\phi _{\tilde{T}} (t)\) be a smooth cutoff function as defined in Sect. 5; here, \(\tilde{T}\in (0, 1/4)\) is a constant to be determined below; it is assumed to be smaller than the constant \(\tilde{T}\) from the previous section, which we from here on denote by \(\tilde{T}_0\). We allow all constants to depend on \(\tilde{T}_0\) (but not on \(\tilde{T}\)).
We again modify the system to be able to construct a solution on a unit time interval. Let
be a modified Lagrangian flow map and \(a (t,x)= (\nabla \eta (t,x))^{-1}\) its inverse matrix, while we denote by \(J(t,x) = \det (\nabla \eta (t,x))\) the corresponding Jacobian. The density equations we consider is
with the solution given by
Next, we consider the solution w to the wave equation (5.12) with the boundary condition (5.13)–(5.16) and the initial data \((w, w_t) (0) = (w_0, w_1)\) in \(\Omega _{\text{ e }}\). With \((\eta , a, J, R, w)\) constructed, we define
where \(\bar{v}\) is the solution of the nonhomogeneous parabolic problem
and
for \(j=1,2,3\), where
and \(\mathbb {I}_3\) is the three-dimensional identity matrix.
Before we bound the terms in (6.8)–(6.9) and prove the contracting property, as in Sect. 5, we provide some necessary estimates on the variable coefficients.
6.1 The Lagrangian Flow Map, Jacobian Matrix, and Density Estimates
We start with estimates on the Jacobian and the inverse matrix of the flow map.
Lemma 6.1
Suppose that \(\Vert v\Vert _{K^{s+1} ((0,1)\times \Omega _{\text{ f }})} \le M\), where \(M\ge 1\), and let \(\delta \in (0,1/5)\). Then for \(\tilde{T}>0\) sufficiently small depending on M and \(\delta \), the following statements hold:
-
(i)
\(\Vert b \Vert _{L^\infty _t H^s_x} +\Vert b\Vert _{H^1_t H^{3/2+\delta }_x}\lesssim \tilde{T}^{1/20}\),
-
(ii)
\(\Vert b\Vert _{H^1_t H^s_x} \lesssim M\),
-
(iii)
\(\Vert 1-J\Vert _{L^\infty _t H^s_x} \lesssim \tilde{T}^{1/20}\),
-
(iv)
\(\Vert J\Vert _{L^\infty _t L^\infty _x} +\Vert J^{-1} \Vert _{L^\infty _t L^\infty _x}+ \Vert J\Vert _{L^\infty _t H^s_x} + \Vert J^{-1} \Vert _{L^\infty _t H^s_x} \lesssim 1\),
-
(v)
\(\Vert J^{-1}\Vert _{H^1_t H^{3/2+\delta }_x} + \Vert J\Vert _{H^1_t H^{3/2+\delta }_x}\lesssim 1\),
-
(vi)
\( \Vert J\Vert _{H^1_t H^s_x} \lesssim M\),
where the region of dependence is understood to be \((0,1)\times \Omega _{\text{ f }}\).
We emphasize that the implicit constants in the above inequalities (i)–(vi) are independent of M and \(\delta \).
Proof of Lemma 6.1
(i) From (2.11) and (6.1) it follows that
while \(b(0) = 0\). By the Fundamental Theorem of Calculus, it follows that for \(t\in (0,2\tilde{T})\) we have
where we appealed to the Cauchy-Schwarz inequality in the last step. Using Gronwall’s inequality, we obtain
for \(\tilde{T}>0\) sufficiently small; the choice of the power 1/20 is apparent in (6.12) below. Since also \(b_t = 0\) on \((2\tilde{T}, 1)\), we then infer that
Applying (6.11) in (6.10) and using (5.22), we obtain
for any \(\epsilon \in (0,1]\). Letting \(\epsilon = \tilde{T}^{1/20} M^{-1}\), we get
for \(\tilde{T}>0\) sufficiently small. Combining (6.11)–(6.12), we conclude the proof of (i).
(ii) From (6.10) and Hölder’s inequality it follows that
which gives (ii).
(iii) From (2.13) and (6.1) we infer that \(J\) satisfies the ODE system
The solution is given by
Using the nonlinear Sobolev estimate, we have
for \(\tilde{T}>0\) sufficiently small.
The proofs of (iv), (v), and (vi) are analogous to the proof of Lemma 5.2, and thus we omit the details.
The following lemma provides the necessary a priori density estimates.
Lemma 6.2
Assume that
and \(\Vert v\Vert _{K^{s+1} ((0,1)\times \Omega _{\text{ f }})} \le M\), where \(M\ge 1\). Let \(\delta \in (0,1/2)\). Then for \(\tilde{T}>0\) sufficiently small depending on M and \(\delta \), the solution to the ODE system (6.2)–(6.3) satisfies
-
(i)
\(\Vert R\Vert _{L^\infty _t L^\infty _x} +\Vert R^{-1} \Vert _{L^\infty _t L^\infty _x} +\Vert R\Vert _{L^\infty _t H^s_x} +\Vert R^{-1} \Vert _{L^\infty _t H^s_x} \lesssim 1\),
-
(ii)
\(\Vert R^{-1} \Vert _{H^1_t H^{3/2+\delta }_x}+ \Vert R\Vert _{H^1_t H^{3/2+\delta }_x} \lesssim 1\),
-
(iii)
\(\Vert R\Vert _{H^1_t H^s_x} \lesssim M\),
where the norm of dependence is \((0, 1)\times \Omega _{\text{ f }}\).
We emphasize that the implicit constants in the above inequalities (i)–(iii) are independent of M and \(\delta \). The proof of Lemma 6.2 is analogous to the proof of Lemma 5.2. Thus we omit the details.
6.2 Uniform Boundedness of the Iterative Sequence
In this section we shall prove that the mapping \(\Pi \) is well-defined from \(\mathcal {Z}\) to \(\mathcal {Z}\), for a sufficiently large constant \(M \ge 1\) and a sufficiently small constant \(\tilde{T}>0\). From Lemmas 4.2 and 6.2, it follows that
where f and h are as in (6.8)–(6.9). Here and below, the time and space domains in the norms are understood to be (0, 1) and \(\Omega _{\text{ f }}\), respectively, unless indicated otherwise. We emphasize that the implicit constants in this section are independent of M.
For the first term on the right side of (6.14), we proceed as in (5.44)–(5.48) to obtain
for any \(\epsilon , \tilde{\epsilon } \in (0,1]\). Next, we estimate the \(K^{s-1}\) norm of the terms on the right side of (6.8) for \(j=1,2,3\). For the space component of the term \(I_1\) in (6.8), we use Hölder’s inequality and Lemmas 6.1–6.2 to get
For the time component, we have
To treat the first term on the right side, we claim that for any \(\alpha >1/2\) we have
on the domain \((0,1)\times \Omega _{\text{ f }}\). Using extensions, we may assume that the domain is actually \(\mathbb {R}\times \mathbb {R}^{3}\). We proceed as in (5.69) and estimate
since \(\alpha >1/2\), and (6.18) follows. For the first term on the right side of (6.17), we now use (6.18) and write
for any \(\epsilon \in (0,1]\), where we used Corollary 3.4 and Lemmas 6.1–6.2. For the second term on the right side of (6.17), we appeal to (5.68) to get
for \(\delta \in (0,1/2)\), where we used Corollary 3.4 and Lemmas 6.1–6.2. Combining (6.16)–(6.17) and (6.19)–(6.20), we obtain
The terms \(I_2\), \(I_3\), \(I_4\), \(I_5\), and \(I_6\) are estimated analogously to \(I_1\), and we get
For the term \(I_7\), we use Hölder’s inequality and obtain
and
where we appealed to Lemmas 6.1–6.2. The term \(I_8\) is estimated analogously to \(I_7\), leading to
Using the estimates on \(I_1\)–\(I_8\) in (6.8), we conclude that
Next, we bound the \(K^{s-1/2} (\Gamma _{\text{ c }})\) norm of the terms on the right side of (6.9), for every fixed \(j=1,2,3\). For \(K_1\), we use Hölder’s and trace inequalities along with Lemma 6.1 to obtain
For the time component, we appeal to Corollary 3.2, obtaining
for any \(\epsilon _1 \in (0,1]\), where \(\delta \in (0,1/5)\). For the term \(K_{11}\), we use Corollary 3.4 and Lemma 6.1 and obtain
Similarly, the term \(K_{12}\) is estimated as
From (6.13), Corollary 3.4, and Lemma 6.1, it follows that
since \(1/2<(s-1)/2<1\) and \(\delta \in (0,1/5)\). Using Lemma 5.1 in (6.26) and applying the resulting inequality in (6.25), we get
where \(\epsilon \in (0,1]\), by taking \(\epsilon _1= \epsilon M^{-1}\). For the term \(K_{13}\), we have
for \(\tilde{T}>0\) sufficiently small. Combining (6.22)–(6.24) and (6.27)–(6.28), we arrive at
for any \(\epsilon \in (0,1]\), by taking \(\tilde{T}>0\) sufficiently small. The term \(K_2\) is estimated analogously to \(K_1\), and we obtain
For the space component of the term \(K_3\), we use Hölder’s and trace inequalities to obtain
where we appealed to Lemma 6.1. For the time component, using Corollary 3.2, we have
for any \(\epsilon _1 \in (0,1]\). The term \(K_{31}\) is estimated analogously to (6.25)–(6.27), and we obtain
by taking \(\epsilon _1= \epsilon M^{-1}\) in (6.32), where \(\epsilon \in (0,1]\) is a constant. The term \(\Vert b\Vert _{H^{s/2}_t H^{1/2}_x}\) is estimated analogously to (6.25)–(6.27), and we get
Therefore, we infer that
The term \(K_{33}\) is estimated using Corollary 3.4 as
while the term \(K_{34}\) is estimated analogously to (6.28) as
by taking \(\tilde{T}>0\) sufficiently small. Combining (6.31)–(6.32) and the estimates on \(K_{31}\)–\(K_{34}\), we conclude that
for any \(\epsilon \in (0,1]\). Regarding the term \(K_4\), we proceed as in (5.51)–(5.52) to obtain
where we used Lemmas 6.1–6.2. The term \(K_5\) is estimated in a similar fashion as \(K_4\), and we arrive at
The terms \(K_6\), \(K_7\), \(K_8\), \(K_9\), and \(K_{10}\) are estimated analogously to \(K_3\), and we have
for any \(\epsilon \in (0,1]\). For the term \(K_{11}\), we proceed as in (5.51)–(5.52) using Lemma 6.2 to obtain
Collecting the estimates (6.29)–(6.30) and (6.33)–(6.37), we conclude
for any \(\epsilon \in (0,1]\). For the fourth term on the right side of (6.14), we have
From (6.14)–(6.15), (6.21), and (6.38)–(6.39) it follows that
for any \(\epsilon , \tilde{\epsilon } \in (0,1]\). We first take \(\epsilon \) sufficiency small, and \(\tilde{\epsilon }\) sufficiently small depending on \(\epsilon \), and then \(\tilde{T}\) sufficiently small depending on \(\epsilon , \tilde{\epsilon }\), yielding
by allowing \(M\ge 1\) sufficiently large. Thus, the mapping \(\Pi :v\mapsto \bar{v}\) is well-defined from \(\mathcal {Z}\) to \(\mathcal {Z}\), for some constant \(M\ge 1\), which depends on the size of the initial data.
6.3 Contracting Property
In this section, we prove
where \(M\ge 1\) is fixed as in (6.40) and \(\tilde{T}\) sufficiently small. Note that the implicit constants below are allowed to depend on M. Let \(\tilde{T}>0\) be a sufficiently small constant such that Lemmas 6.1–6.2 hold.
Let \(v_1, v_2 \in \mathcal {Z}\) and \((\eta _1, \eta _2)\) be the corresponding Lagrangian flow maps as in (6.1). Denote by \((J_1, a_1)\) and \((J_2, a_2)\) the Jacobians and the inverse matrices of the corresponding flow map. First we solve for \((R_1, R_2)\) from (6.2)–(6.3) with the same initial data \(R_0\). Then we solve for \((\xi _1, \xi _{1t})\) and \((\xi _2, \xi _{2t})\) from (5.12) with the boundary conditions (5.13)–(5.16) and the same initial data \((w_0, w_1)\). To obtain the next iterate \((\bar{v}_1, \bar{v}_2)\), we solve (5.40) with the boundary conditions and the initial data (5.41). Denote \(b_1 = a_1 - \mathbb {I}_3\), \(b_2 = a_2 - \mathbb {I}_3\), \(\tilde{b} = b_1 - b_2\), \(\tilde{V} = \bar{v}_1 - \bar{v}_2\), \(\tilde{v} = v_1 - v_2\), \(\tilde{R} = R_1 - R_2\), \(\tilde{\xi } = \xi _1 - \xi _2\), \(\tilde{\eta }= \eta _1 -\eta _2\), and \(\tilde{J} = J_1 - J_2\). The difference \(\tilde{V}\) satisfies
where
and
for \(j=1,2,3\).
Before we bound the terms on the right sides of (6.43) and (6.44), we provide necessary a priori estimates for the differences of densities, Jacobians, and inverse matrices of the flow map.
Lemma 6.3
Let \(v_1, v_2 \in \mathcal {Z}\). Suppose \(\Vert v_1\Vert _{K^{s+1} ((0,1)\times \Omega _{\text{ f }})} \le M\) and \(\Vert v_2\Vert _{K^{s+1} ((0,1)\times \Omega _{\text{ f }})} \le M\), where \(M\ge 1\) is fixed as in (5.54). Let \(\delta \in (0,1/5)\). Then, for \(\tilde{T}>0\) sufficiently small depending on \(\delta \), we have
-
(i)
\(\Vert \tilde{b} \Vert _{L^\infty _t H^s_x} + \Vert \tilde{b} \Vert _{H^1_t H^{3/2+\delta }_x} \lesssim \tilde{T}^{1/20} \Vert \tilde{v} \Vert _{K^{s+1}}\),
-
(ii)
\(\Vert \tilde{R} \Vert _{L^\infty _t H^s_x} + \Vert \tilde{R} \Vert _{H^1_t H^{3/2+\delta }_x} \lesssim \tilde{T}^{1/20} \Vert \tilde{v} \Vert _{K^{s+1}}\),
-
(iii)
\(\Vert \tilde{J} \Vert _{L^\infty _t H^s_x} + \Vert \tilde{J} \Vert _{H^1_t H^{3/2+\delta }_x} \lesssim \tilde{T}^{1/20} \Vert \tilde{v} \Vert _{K^{s+1}}\),
-
(iv)
\(\Vert \tilde{R} \Vert _{H^1_t H^s_x} + \Vert \tilde{b} \Vert _{H^1_t H^s_x} + \Vert \tilde{J} \Vert _{H^1_t H^s_x} \lesssim \Vert \tilde{v} \Vert _{K^{s+1}}\),
for any \(\delta \in (0,1)\), where the norm of dependence is \((0,1)\times \Omega _{\text{ f }}\).
Proof of Lemma 6.3
(i) From (6.10) it follows that the difference \(\tilde{b}\) satisfies
with the initial data \(\tilde{b}(0) = 0\). Using the fundamental theorem of calculus, we obtain that for \(t\in (0, 2\tilde{T})\)
where the last inequality follows from Lemma 6.1. Using Gronwall’s inequality, we arrive at
Therefore, we have
since \(\tilde{b}_t = 0\) on \((2\tilde{T},1)\). From (6.45) and Hölder’s and the Sobolev inequalities it follows that
for any \(\epsilon _1 \in (0,1]\), where we used Corollary 3.4 and Lemma 6.1. Letting \(\epsilon _1 = \tilde{T}^{1/20}\), we obtain
Combining (6.47) and (6.49), we conclude the proof of (i).
(ii) Since the difference \(\tilde{R}\) satisfies the ODE system
the solution is given by
From Hölder’s inequality, it follows that
where we used (6.47) in the last inequality. Using (6.50) and Hölder’s and Sobolev inequalities, we obtain
We proceed analogously to Lemma 6.2 to get
By combining (6.52)–(6.53), we conclude the proof of (ii)
The proofs of (iii) and (iv) are analogous to the proofs of (i)–(iii), and thus we omit the details.
Proof of Theorem 2.1
From Lemmas 4.2 and 6.2, it follows that the solution \(\tilde{V}\) of (6.42) satisfies
where \(\tilde{f}_j\) and \(\tilde{h}_j\) are as in (6.43)–(6.44), for \(j=1,2,3\).
For the first term on the right side of (6.54), we proceed as in (5.44)–(5.48) to obtain
for any \(\epsilon , \tilde{\epsilon } \in (0,1]\).
Next we estimate the \(K^{s-1}\) norm of terms on the right side of (6.43) for \(j=1,2,3\). The space component of the term \(\tilde{R} b_{1kj} \partial _k (b_{1mi} \partial _m \bar{v}_{1i})\) is bounded as
while for the time component, we have
where we used Corollary 3.4 and Lemmas 6.1–6.3. Similarly, the term \(\mu R_2 b_{2kj} \partial _k \partial _i \tilde{V}_{i}\) is estimated as
and
Other terms on the right side of (6.43) are treated analogously as in the proof of Theorem 5.4 using Lemmas 6.1–6.3, and we arrive at
Next we estimate the \(K^{s-1/2}_{\Gamma _{\text{ c }}}\) norm of the terms on the right side of (6.44), for \(j=1,2,3\). The term \(\lambda (1- J_2) \partial _k \tilde{V}_j \nu ^k\) is estimated using the trace inequality and Lemma 6.1 as
For the time component, we proceed analogously to (6.23)–(6.28), obtaining
for any \(\epsilon _1 \in (0,1]\). Other terms on the right side of (6.44) are treated analogously to Theorem 5.4 using Lemmas 6.1–6.3, and we arrive at
for any \(\epsilon _1 \in (0,1]\).
Since the terms involving \(\Vert \tilde{V} \Vert _{K^{s+1}}\) on the right side of (6.56)–(6.57) are absorbed to the left side (6.54) by taking \(\epsilon _1\) and \(\tilde{T}>0\) sufficiently small, we obtain from (6.54)–(6.57) that
by taking suitable \(\epsilon \), \(\tilde{\epsilon }\), and \(\tilde{T}>0\). Thus the mapping \(\Pi \) is contracting from \(\mathcal {Z}\) to \(\mathcal {Z}\). Using the Banach fix point theorem, there exists a unique solution \(v \in \mathcal {Z}\) such that \(\Pi (v) = v\).
Fix the constant \(\tilde{T}>0\). We proceed as in (5.77)–(5.80) to obtain the interior regularity estimate
where \(C>0\) is a constant. From (6.58) and Lemma 6.2 it follows that the system (2.3)–(2.10) admits a unique solution
for some constant \(\tilde{T}>0\), with the corresponding norms bounded by a function of the initial data. \(\square \)
References
Abels, H., Liu, Y.: On a fluid–structure interaction problem for plaque growth. arXiv:2110.00042
Avalos, G., Lasiecka, I., Triggiani, R.: Higher regularity of a coupled parabolic-hyperbolic fluid–structure interactive system. Georgian Math. J. 15(3), 403–437 (2008)
Avalos, G., Triggiani, R.: The coupled PDE system arising in fluid/structure interaction. I. Explicit semigroup generator and its spectral properties, Fluids and waves, Contemp. Math., vol. 440, pp. 15–54. American Mathematical Society, Providence (2007)
Avalos, G., Triggiani, R.: Fluid-structure interaction with and without internal dissipation of the structure: a contrast study in stability. Evol. Equ. Control Theory 2(4), 563–598 (2013)
Boulakia, M.: Existence of weak solutions for the three-dimensional motion of an elastic structure in an incompressible fluid. J. Math. Fluid Mech. 9(2), 262–294 (2007)
Boulakia, M., Guerrero, S.: Regular solutions of a problem coupling a compressible fluid and an elastic structure. J. Math. Pures Appl.(9) 94(4), 341–365 (2010)
Boulakia, M., Guerrero, S.: A regularity result for a solid-fluid system associated to the compressible Navier–Stokes equations. Ann. Inst. H. Poincaré Anal. Non Linéaire 26(3), 777–813 (2009)
Boulakia, M., Guerrero, S.: On the interaction problem between a compressible fluid and a Saint-Venant Kirchhoff elastic structure. Adv. Differential Equations 22(1/2), 1–48 (2017)
Barbu, V., Grujić, Z., Lasiecka, I., Tuffaha, A.: Existence of the energy-level weak solutions for a nonlinear fluid–structure interaction model, Fluids and waves, Contemp. Math., vol. 440, pp. 55–82. American Mathematical Society, Providence (2007)
Barbu, V., Grujić, Z., Lasiecka, I., Tuffaha, A.: Smoothness of weak solutions to a nonlinear fluid–structure interaction model. Indiana Univ. Math. J. 57(3), 1173–1207 (2008)
Boulakia, M., Guerrero, S., Takahashi, T.: Well-posedness for the coupling between a viscous incompressible fluid and an elastic structure. Nonlinearity 32(10), 3548–3592 (2019)
Belishev, M.I., Lasiecka, I.: The dynamical Lamé system: regularity of solutions, boundary controllability and boundary data continuation. ESAIM Control Optim. Calc. Var. vol. 8, A tribute to J. L. Lions, pp. 143–167 (2002)
Bucci, F., Lasiecka, I.: Optimal boundary control with critical penalization for a PDE model of fluid–solid interactions. Calc. Var. Partial Differ. Equ. 37(1–2), 217–235 (2010)
Breit, D., Schwarzacher, S.: Compressible fluids interacting with a linear-elastic shell. Arch. Ration. Mech. Anal. 228, 495–562 (2018)
Bociu, L., Toundykov, D., Zolésio, J.-P.: Well-posedness analysis for a linearization of a fluid-elasticity interaction. SIAM J. Math. Anal. 47(3), 1958–2000 (2015)
Bociu, L., Zolésio, J.-P.: Sensitivity analysis for a free boundary fluid-elasticity interaction. Evol. Equ. Control Theory 2(1), 55–79 (2013)
Bociu, L., Zolésio, J.-P.: Existence for the linearization of a steady state fluid, nonlinear elasticity interaction, Discrete Contin. Dyn. Syst.: Dynamical systems, differential equations and applications. 8th AIMS Conference. Suppl. vol. I, pp. 184–197 (2011)
Coutand, D., Shkoller, S.: Motion of an elastic solid inside an incompressible viscous fluid. Arch. Ration. Mech. Anal. 176(1), 25–102 (2005)
Coutand, D., Shkoller, S.: The interaction between quasilinear elastodynamics and the Navier–Stokes equations. Arch. Ration. Mech. Anal. 179(3), 303–352 (2006)
Desjardins, B., Esteban, M.J., Grandmont, C., Le Tallec, P.: Weak solutions for a fluid-elastic structure interaction model. Rev. Mat. Complut. 14(2), 523–538 (2001)
Du, Q., Gunzburger, M.D., Hou, L.S., Lee, J.: Analysis of a linear fluid–structure interaction problem. Discrete Contin. Dyn. Syst. 9(3), 633–650 (2003)
Feireisl, E.: On the motion of rigid bodies in a viscous incompressible fluid. J. Evol. Equ. 3(3), 419–441 (2003). Dedicated to Philippe Bénilan
Grisvard, P.: Caractérisation de quelques espaces d’interpolation. Arch. Ration. Mech. Anal. 25, 40–63 (1967)
Grandmont, C., Hillairet, M.: Existence of global strong solutions to a beam-fluid interaction system. Arch. Ration. Mech. Anal. 220(3), 1283–1333 (2016)
Guidoboni, G., Glowinski, R., Cavallini, N., Canic, S.: Stable loosely-coupled-type algorithm for fluid–structure interaction in blood flow. J. Comput. Phys. 228(18), 6916–6937 (2009)
Guidoboni, G., Glowinski, R., Cavallini, N., Canic, S., Lapin, S.: A kinematically coupled time-splitting scheme for fluid–structure interaction in blood flow. Appl. Math. Lett. 22(5), 684–688 (2009)
Ignatova, M., Kukavica, I., Lasiecka, I., Tuffaha, A.: On well-posedness for a free boundary fluid–structure model. J. Math. Phys. 53(11), 115624 (2012)
Ignatova, M., Kukavica, I., Lasiecka, I., Tuffaha, A.: On well-posedness and small data global existence for an interface damped free boundary fluid-structure model. Nonlinearity 27(3), 467–499 (2014)
Kaltenbacher, B., Kukavica, I., Lasiecka, I., Triggiani, R., Tuffaha, A., Webster, J.T.: Mathematical theory of evolutionary fluid-flow structure interactions, Oberwolfach Seminars, vol. 48. Birkhäuser/Springer, Cham (2018). Lecture notes from Oberwolfach seminars, November 20–26, 2016
Kukavica, I., Mazzucato, A.L., Tuffaha, A.: Sharp trace regularity for an anisotropic elasticity system. Proc. Am. Math. Soc. 141(8), 2673–2682 (2013)
Kukavica, I., Ożański, W., Tuffaha, A.: On the global existence for a fluid–structure model with small data. arXiv:2110.15284
Kukavica, I., Tuffaha, A.: Solutions to a fluid–structure interaction free boundary problem. Discrete Contin. Dyn. Syst. 32(4), 1355–1389 (2012)
Kukavica, I., Tuffaha, A.: Regularity of solutions to a free boundary problem of fluid–structure interaction. Indiana Univ. Math. J. 61(5), 1817–1859 (2012)
Kukavica, I., Tuffaha, A.: Well-posedness for the compressible Navier–Stokes–Lamé system with a free interface. Nonlinearity 25(11), 3111–3137 (2012)
Kukavica, I., Tuffaha, A., Ziane, M.: Strong solutions to a nonlinear fluid structure interaction system. J. Differ. Equ. 247(5), 1452–1478 (2009)
Kukavica, I., Tuffaha, A., Ziane, M.: Strong solutions for a fluid structure interaction system. Adv. Differ. Equ. 15(3–4), 231–254 (2010)
Kukavica, I., Tuffaha, A., Ziane, M.: Strong solutions to a Navier–Stokes–Lamé system on a domain with a non-flat boundary. Nonlinearity 24(1), 159–176 (2011)
Lions, J.-L.: Quelques méthodes de résolution des problèmes aux limites non linéaires, Dunod (1969)
Lions, J.-L.: Hidden regularity in some nonlinear hyperbolic equations. Mat. Apl. Comput. 6(1), 7–15 (1987)
Lasiecka, I., Lu, Y.: Asymptotic stability of finite energy in Navier Stokes-elastic wave interaction. Semigroup Forum 82(1), 61–82 (2011)
Lasiecka, I., Lu, Y.: Interface feedback control stabilization of a nonlinear fluid–structure interaction. Nonlinear Anal. 75(3), 1449–1460 (2012)
Lasiecka, I., Lions, J.-L., Triggiani, R.: Nonhomogeneous boundary value problems for second order hyperbolic operators. J. Math. Pures Appl. (9) 65(2), 149–192 (1986)
Lions, J.-L., Magenes, E.: Nonhomogeneous Boundary Value Problems and Applications, vol. 2. Springer, Berlin (1972)
Lasiecka, I., Toundykov, D.: Semigroup generation and “hidden’’ trace regularity of a dynamic plate with non-monotone boundary feedbacks. Commun. Math. Anal. 8(1), 109–144 (2010)
Lasiecka, I., Triggiani, R.: Uniform stabilization of the wave equation with Dirichlet or Neumann feedback control without geometrical conditions. Appl. Math. Optim. 25(2), 189–224 (1992)
Lasiecka, I., Triggiani, R.: Sharp regularity theory for elastic and thermoelastic Kirchoff equations with free boundary conditions. Rocky Mountain J. Math. 30(3), 981–1024 (2000)
Muha, B., Čanić, S.: Existence of a weak solution to a nonlinear fluid–structure interaction problem modeling the flow of an incompressible, viscous fluid in a cylinder with deformable walls. Arch. Ration. Mech. Anal. 207(3), 919–968 (2013)
Muha, B., Čanić, S.: Existence of a weak solution to a fluid-elastic structure interaction problem with the Navier slip boundary condition. J. Differ. Equ. 260(12), 8550–8589 (2016)
Muha, B., Čanić, S.: Fluid-structure interaction between an incompressible, viscous 3D fluid and an elastic shell with nonlinear Koiter membrane energy. Interfaces Free Bound. 17(4), 465–495 (2015)
Raymond, J.-P., Vanninathan, M.: A fluid-structure model coupling the Navier–Stokes equations and the Lamé system. J. Math. Pures Appl. (9) 102(3), 546–596 (2014)
Sakamoto, R.: Hyperbolic boundary value problems. Cambridge University Press, Cambridge (1982). Translated from the Japanese by Katsumi Miyahara
San Martín, J.A., Starovoitov, V., Tucsnak, M.: Global weak solutions for the two-dimensional motion of several rigid bodies in an incompressible viscous fluid. Arch. Ration. Mech. Anal. 161(2), 113–147 (2002)
Tataru, D.: On the regularity of boundary traces for the wave equation. Ann. Scuola Norm. Sup. Pisa Cl. Sci. (4) 26(1), 185–206 (1998)
Trifunović, S.: Compressible fluids interacting with plates: regularity and weak–strong uniqueness. J. Math. Fluid Mech. 25(1), 1–28 (2023)
Acknowledgements
IK was supported in part by the NSF grants DMS-1907992 and DMS-2205493, while LL was supported in part by the NSF grants DMS-1907992, DMS-2009458, and DMS-2205493. The work was undertaken while the authors were members of the MSRI program “Mathematical problems in fluid dynamics” during the Spring 2021 semester (NSF DMS-1928930).
Funding
Open access funding provided by SCELC, Statewide California Electronic Library Consortium.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by G.P. Galdi.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kukavica, I., Li, L. & Tuffaha, A. On the Local Existence of Solutions to the compressible Navier–Stokes-Wave System with a Free Interface. J. Math. Fluid Mech. 26, 25 (2024). https://doi.org/10.1007/s00021-024-00861-8
Accepted:
Published:
DOI: https://doi.org/10.1007/s00021-024-00861-8