
Abstract
This paper is concerned with the finite-time synchronization of coupled networks with time-varying delays. We work without applying the finite-time stability theorem, which is widely used in finite-time synchronization for complex networks or finite-time consensus problems for multi-agent systems. We construct a novel Lyapunov functional and apply some new analytical techniques. Sufficient conditions are obtained to ensure synchronization within a setting time with no Zeno behaviors. The obtained conditions do not contain any uncertain parameter. The controllers are presented based on event-driven strategies, which can significantly reduce the communication consumption and the frequency of the controller updates. And the setting time is related to initial values of the network. Finally, numerical examples are examined to illustrate the effectiveness of the analytical results.
Similar content being viewed by others

1 Introduction
A coupled system is a suitable model for many distributed phenomena in communication engineering, economics and biological science [1–3]. And asymptotic synchronization of coupled complex network systems has been studied widely in the last few decades [4–9].
In practical engineering, it is often expected that one might realize synchronization as fast as possible. In terms of secure communication, it is an important application of synchronization. As is well known, the range of time during which the chaotic oscillators are not synchronized corresponds to the range of time during which the encoded message can unfortunately not be recovered [10]. That is, asymptotic synchronization is not optimal because machines’ and human’s life spans are limited [11]. Therefore, finite-time control technique has been introduced in the continuous systems [12, 13]. And it has better robustness and disturbance rejection properties when the system is stabilized within a setting time. Thus, the finite-time control technique has been extensively used to synchronize networks [11, 14–17].
Moreover, almost all the aforementioned works assume that the Markovian switching (or chain) is homogeneous, that is, the transition probabilities are time-invariant. However, in many real-world applications, the homogeneity assumption may not be scientific or cannot be verified. For example, the random component failure phenomenon is considered in descriptor systems. Usually, it is often assumed that the component failure rates (or probabilities) are time-independent and independent of system state. In other words, the underlying Markovian chain used to model random failures is homogeneous. But this assumption is often violated and the failure rate of a component usually depends on many factors in reality such as its age, working time [18]. In most cases, it is reasonable to assume that if a component has more influencing factors, it is more likely to fail. Most of the research results are based on the known transition probabilities for the Markovian jump systems (MJSs). On the other hand, estimation errors, also referred to as transition probability uncertainties, may lead to instability or at least degraded system performances. And this kind of estimation errors has been studied in [19, 20]. But the Markovian chain in [19, 20] is also homogeneous. Thus, considering time-varying uncertainties leads to nonhomogeneous Markovian chains. Therefore, we just consider a nonhomogeneous Markovian chain, and it will be more realistic to describe the real world.
However, traditional finite-time synchronization problems are based on sliding mode controllers (containing sign function), and utilize finite-time stability theorem, which cause the chattering phenomenon [16]. The chattering phenomenon may shock apparatuses in the network and consequently shorten the service life of the apparatuses. Taking account of this, the authors of [15] designed the new controller, which utilize the 1 norm to avoid the chattering phenomenon in realizing finite-time synchronization of coupled networks without time delays.
It is well known that time delays inevitably appear in the process of information storage and transmission in real coupled complex networks due to the finite speed of transmission as well as traffic congestion [21, 22]. Unfortunately, time delays often lead to system instability, oscillation, or bad performance, which is very harmful to the applications of coupled network systems [23]. If the existence of time delays is not considered, which will bring more conservativeness to the actual applications [24]. Therefore, there are many important results on stability analysis and synchronization of coupled complex networks with time-varying delays [25–28]. However, as for finite-time synchronization problems, most of the existing results focused on non-delayed network systems by using finite-time stability theorem [11, 14, 17]. When time delays exist in the coupled networks, the finite-time stability theorem in the existing results cannot directly be applied to the finite-time synchronization problem of coupled complex networks with time-varying delays [29]. This problem is therefore worthy of studying from the point of view of theory and engineering.
In some real-world networks, the connected nodes share information over a digital platform, which leads one to investigate the synchronization problems by using the limited communication network resource effectively. That is, the nodes communicate to their neighbors only at certain discrete-time instants [30]. Classical time-driven control was proposed by sampling the systems at a pre-specified time interval [31]. This can cause the problem of synchronization of sampling instants, and the simultaneous transmission of all the information over the network. Conversely, event-triggered control (ETC) can prevent unnecessary control updates with respect to the traditional periodic control [32]. Recently, by using different types of ETC, a great number of significant results on asymptotic synchronization of networked systems have become available in the literature [33–36]. However, to the best of the authors’ knowledge, finite-time synchronization problems have not yet been addressed for the coupled complex networks in terms of time-varying delays by using ETC. And the important issue is how to design the ETR (event-trigger rule) for each node to achieve finite-time synchronization of the coupled networks and meanwhile to prevent Zeno behavior.
Motivated by the above discussion, in this paper, we study finite-time synchronization for coupled networks with time-varying delays by using event-triggered control. The main novelties of this note are: (1) by constructing the new ETR of each node, designing new Lyapunov functional and using matrix inequalities, sufficient conditions are derived to guarantee the finite-time synchronization without Zeno behavior; (2) we do not use the well-known finite-time stability theorem in [12], and the setting time can be easily obtained.
Notation
Throughout this paper, a graph is defined as a pair \(\mathcal{G}=(\mathcal{V},\mathcal{A})\) consisting of a set of nodes \(\mathcal{V}=\{1,2,\ldots ,N\}\) and a time-varying matrix \(A(t)=\{a_{ij}(t)\geq 0\}\in R^{N\times N}\), \(A(t)\) is piecewise-constant, that is, \(a_{ij}(t)\geq 0\) is piecewise-constant for all \(i, j\in \mathcal{V}\). \(R^{n}\) and \(R^{n\times m}\) denote respectively, the set of \(n\times 1\) real vectors and the set of all \(n\times m\) real matrices. \(D^{+}\) stands for Dini derivative. The superscript “T” denotes the transpose and the notation \(X\geq Y\) (respectively, \(X >Y\)) where X and Y are symmetric matrices, means that \(X-Y\) is positive semi-definite (respectively, positive definite); \(I_{N}\) is the identity matrix with compatible dimension. \(\|\cdot \|_{1}\) refers to the 1-norm of a row (column) vector or a matrix, i.e., \(\|x\|_{1}=\sum_{i=1}^{n}|x_{i}|\) for \(x=(x_{1},x_{2},\ldots ,x_{n})\) (\(x=(x_{1},x_{2},\ldots ,x_{n})^{T}\in R^{n}\)) and \(\|A\|_{1}=\max_{j}\sum_{i=1}^{n}|a_{ij}|\) for \(A=(a_{ij})_{n\times n}\in R^{n\times n}\).
2 System description
Considering the coupled network composed of N identical nodes, each node is an n-dimensional delayed dynamical system described by
where \(x_{i}(t)=[x_{i1}(t), x_{i2}(t), \ldots , x_{in}(t)]^{T}\in R^{n}\) represent the state vectors of the ith node, \(\tau (t)\) is the time-varying delay of node i, \(f(x_{i}(t))= (f_{1}(x_{i}(t)), f_{2}(x_{i}(t)), \ldots , f_{n}(x_{i}(t)) )^{T}\in R^{n}\) is a continuous vector-valued function, and \(u_{i}(t)=[u_{i1}(t), u_{i2}(t), \ldots , u_{in}(t)]^{T}\in R^{n}\) are the control inputs. For simplicity, we take the network model (1) as the drive system and consider the response coupled network system described as follows:
where \(y_{i}(t)\) denote the states of the response system, \(u_{i}(t)\) denote the control inputs to realize finite-time synchronization, and the rest variables and parameters are the same as those in the drive system (1).
Definition 1
The complex networked system (1) is said to be synchronized with the drive system (2) in finite time if there exists a constant \(0\leq T\leq +\infty \), which depends on the initial values for arbitrary solutions of system (1) and system (2), such that \(\lim_{t\rightarrow T}\|e(t)\|_{1}=0\) and \(\|e(t)\|_{1}\equiv 0\) for \(\forall t > T\), where T is called the setting time.
We need the following assumptions to study the finite-time synchronization of the system (1).
Assumption 1
There exists a matrix \(\theta =(\theta _{ij})_{n \times n}\), in which \(\theta _{ij}\geq 0\), such that
\(\forall x=(x_{1},x_{2},\ldots ,x_{n})^{T}\in R^{n}\), \(y=(y_{1},y_{2},\ldots ,y_{n})^{T}\in R^{n}\), \(i=1,2,\ldots ,n\).
Assumption 2
There exist two constants τ and ξ, such that \(\xi <1\), \(\dot{\tau }(t)\leq \xi \), \(0<\tau (t)\leq \tau \).
3 Main results
It is well known that time delays are unavoidable for complex network modeling. Therefore, it is very important to consider the dynamics for the complex networks with time delays, and finite-time synchronization analysis is obviously one of the most important problems. In order to achieve the finite-time synchronization defined in Definition 1, the controllers should be designed and brought in cooperation to the nodes of system (1). The following controllers of the paper are considered for \(t\in [t_{k}^{i}, t_{k+1}^{i})\):
where \(\varXi _{i}=\sum_{j=1}^{N}|b_{ij}e_{j}(t_{k}^{j}-\tau (t))|\), \(k_{1}\), \(k_{2}\) and \(k_{3}\) are positive designed parameters. Time \(t_{k}^{i}\) are events of node i when signal \(u_{i}(t)\) change values. And the control signals \(u_{i}(t)\) are piecewise functions, since they hold different values over each interval \([t_{k}^{i}, t_{k+1}^{i})\). The measurement errors for node i are introduced as \(\hat{e}_{i}(t)=e_{i}(t)-e_{i}(t_{k}^{i})\), \(\tilde{e}_{i}(t)=e_{i}(t- \tau (t))-e_{i}(t_{k}^{i}-\tau (t))\), \(t\in [t_{k}^{i}, t_{k+1}^{i})\).
The time sequence \(t_{k}^{i}\) is described by the ETR
where the trigger functions for node i are designed as \(\hat{g}_{i}(t)=\|\hat{e}_{i}(t)\|_{1}-\hat{\rho } \|e_{i}(t)\|_{1}\), \(\tilde{g}_{i}(t)= |\tilde{e}_{i}(t) |-\tilde{\rho } |e_{i}(t- \tau (t)) |\), and \(0<\hat{\rho }<1\), \(0<\tilde{\rho }<1\).
Remark
If \(\hat{g}_{i}(t)=|\hat{e}_{i}(t)|-\hat{\rho }|e_{i}(t)|>0\), then \(\hat{g}_{i}(t)=\|\hat{e}_{i}(t)\|_{1}-\hat{\rho } \|e_{i}(t)\|_{1}>0\) can be deduced. However, the converse is not necessarily true. Therefore, the trigger condition (5) in this paper is weaker and easier to implement.
Subtracting (1) from (2) based on the controller (4), the following error dynamical systems are obtained in the following form for \(i=1, 2, \ldots , N\):
where \(F(e_{i}(t))=f(y_{i}(t))-f(x_{i}(t))\).
Based on the controller (4) and the error system (6), the following result is derived.
Theorem 1
Let Assumptions1–2be satisfied. If
hold, then the drive coupled system (1) and the response coupled system (2) are finite-time synchronized under the controller (4). Furthermore, the setting timeTis estimated as
where\(\tau _{0}=\tau (0)\), \(\|A\|_{1}=\max_{j}\sum_{i=1}^{N}|a_{ij}|\)and\(\|B\|_{1}=\max_{j}\sum_{i=1}^{N}|b_{ij}|\).
Proof
Consider the following Lyapunov–Krasovskii functional:
where \(V_{1}(t)=\sum_{i=1}^{N}\|e_{i}(t)\|_{1}\), \(V_{2}(t)=\frac{1}{1-\xi } \sum_{i=1}^{N}\sum_{j=1}^{N}\int _{t-\tau (t)}^{t} |b_{ij}e_{j}(s) |\,\mathrm{d}s\). Differentiating \(V(t)\) and considering the controller (4), we get
where
In addition, the trigger function (5) implies \(\|\hat{e}_{i}(t)\|_{1}\leq \hat{\rho }\|e_{i}(t)\|_{1}\), which implies \(\|\hat{e}_{i}(t)\|_{1}\leq \|e_{i}(t)\|_{1}\) due to \(0<\hat{\rho }<1\). Then, since
implies \(\operatorname{sign}(e_{i}(t))=\operatorname{sign}(e_{i}(t_{k}^{i}))\) for \(t\in [t_{k}^{i},t_{k+1}^{i})\), we thus have
From (10) and (12), we can get
Since
based on the trigger function (5), the above inequality (14) follows since
And by the trigger function (5), we get \(-\|\hat{e}_{i}(t)\|_{1}\geq -\hat{\rho }\|e_{i}(t)\|_{1}\),
From the inequalities (13)–(15), the following inequality is obtained:
Differentiating \(V_{2}(t)\), we derive
From Assumption 2, one obtains \(\dot{\tau }(t)\leq \xi \), then \(-(1-\dot{\tau }(t))\leq -(1-\xi )\). It follows from (11) that
Substituting inequalities (16) and (18) into \(\dot{V}(t)\) yields
It can be obtained from (7) that
Inspired by the method of proof in the finite-time synchronization problem investigated in [15], \(V(t)\) is positive definite, it can be seen from inequality (20) that there exists a nonnegative constant \(V^{\ast }\) such that
On the other hand, integrating (20) from 0 to t, we can get
if \(\sum_{i=1}^{N}\|e_{i}(t)\|_{1}+\frac{1}{1-\xi }\sum_{i=1}^{N}\sum_{j=1}^{N} \int _{t-\tau (t)}^{t} |b_{ij}e_{j}(s) |\,\mathrm{d}s=0\) at an instant \(T\in (0, +\infty )\), then we can proceed with the discussion from (23). If \(\sum_{i=1}^{N}\|e_{i}(t)\|_{1}+\frac{1}{1-\xi }\sum_{i=1}^{N}\sum_{j=1}^{N} \int _{t-\tau (t)}^{t} |b_{ij}e_{j}(s) |\,\mathrm{d}s>0\), \(\forall t\in [0, +\infty )\), then from \(k_{2} >0\), we get \(-k_{2} t<0\) for all \(t\in [0, +\infty )\). Then (23) means that \(\lim_{t\rightarrow +\infty }V(t)=-\infty \). This contradicts (21) and (22), and it is not true for \(t\rightarrow +\infty \). Therefore, there exists \(T\in (0, +\infty )\) such that
It is obvious that \(V(e(t_{0}))=0\) and \(V(e(t))\equiv 0\), \(\forall t\geq t_{0}\), where \(t_{0}=T+\tau _{0}\). From (19), it can be concluded that
Integrating both sides of the inequality (24) from 0 to \(t_{0}\), we can obtain \(t_{0}\leq \frac{V(e(0))}{k_{2}}\). Therefore, one can get \(T\leq t_{0}-\tau _{0}=\frac{V(e(0))}{k_{2}}-\tau _{0}\), then
The proof is hence completed. □
Through the following theorem, it is proved that the system under the controller (4) shows no Zeno behavior.
Theorem 2
Consider the drive coupled network system (1) and the response system (2) under the event-triggered controller (4) with trigger functions (5). Assume that the condition (7) is satisfied in Theorem 1, then, for a nodeiwith\(\|e_{i}(t_{k}^{i})\|_{1}\neq 0\)and\(e_{i}(t_{k}^{i}-\tau (t))\neq 0\), \(t\in [t_{k}^{i},t_{k+1}^{i})\).
Proof
\(\dot{V}(t)\leq -k_{2}<0\), for all \(t\in [t_{k}^{i},t_{k+1}^{i})\). Then when \(t\in [t_{k}^{i},t_{k+1}^{i})\), one has \(V(t)\leq V(t_{k}^{i})\), which yields \(\|e_{i}(t)\|_{1}\leq V(t_{k}^{i})\). Then, when \(t\in [t_{k}^{i},t_{k+1}^{i})\), one can get
Since \(\hat{e}_{i}(t_{k}^{i})=0\), we obtain
In addition, \(\|\hat{e}_{i}(t)\|_{1}\leq \frac{\hat{\rho }}{1+\hat{\rho }}\|e_{i}(t_{k}^{i}) \|_{1}\) yields \(\|\hat{e}_{i}(t)\|_{1}\leq \hat{\rho }\|e_{i}(t)\|_{1}\).
Thus, when \(t=t_{k+1}^{i}\) and \(\|\hat{e}_{i}(t_{k+1}^{i})\|_{1}>\frac{\hat{\rho }}{1+\hat{\rho }}\|e_{i}(t_{k}^{i}) \|_{1}\), then
which implies \(t_{k+1}^{i}-t_{k}^{i}>0\), since \(\|e_{i}(t_{k}^{i})\|_{1}\neq 0\).
Similarly, if the event is triggered due to \(|\tilde{e}_{i}(t)|>\tilde{\rho }|e_{i}(t-\tau (t))|\), \(t_{k+1}^{i}-t_{k}^{i}>0\) also holds. Further, from (25)–(27), one obtains
and
for all \(t\in [t_{k}^{i},t_{k+1}^{i})\), which implies \(\|e_{i}(t_{k+1}^{i})\|_{1}>0\) and \(|e_{i}(t_{k+1}^{i}-\tau (t))|>0\). Furthermore, these result in \(t_{k+2}^{i}-t_{k+1}^{i}>0\). By induction, it is obvious that node i will not exhibit Zeno triggering for all \(t>t_{k}^{i}\). This ends the proof. □
4 Numerical examples
In this section, the example is provided to demonstrate the effectiveness of the proposed approach.
Example 1
In this example, the finite-time synchronization of the time-varying delayed coupled drive system (1) and the response system (2) with the controller (4) is investigated as follows:
where \(x_{i}(t)=(x_{i1}(t),x_{i2}(t))^{T}\) and \(y_{i}(t)=(y_{i1}(t),y_{i2}(t))^{T}\) are the state variables of the ith node for the drive and response system, respectively, \(x_{i}(0)=x_{i,0}\) and \(y_{i}(0)=y_{i,0}\) are the initial state values, \(\tau (t)=\frac{\sin t}{2}\), and the outer coupling matrices are assumed to be
The nonlinear function \(f(\cdot )\) is given by [24]
in which
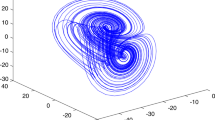
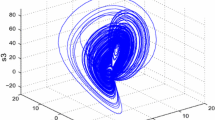
By simple computation, we have \(\|\theta \|_{1}=0.5303\), in view of (3), (4) and the parameters of network (32). From Assumption 1 and condition (7), letting \(\xi =0.5\), \(\hat{\rho }=0.2\), \(\tilde{\rho }=0.4\), we obtain \(k_{1}\geq 5.6828\), \(k_{3}\geq 1.6667\), and \(k_{2}\) can be any positive constant. Choosing \(k_{2}=2\), and the initial value arbitrarily chosen from \((-2,2)\) by uniform distribution and we get \(\sum_{i=1}^{4}\|e_{i}(0)\|_{1}=4.4744\), \(\forall t\in [-1,0]\), and \(e_{i}(t)=0\) for \(t<-1\), it is derived from (8) that the network is synchronized within \(T=3.7230\). Figure 1 shows that \(x_{1}(t)\)\(x_{2}(t)\)\(x_{3}(t)\)\(x_{4}(t)\) and \(y_{1}(t)\)\(y_{2}(t)\)\(y_{3}(t)\)\(y_{4}(t)\) evolve with the above initial values. Figure 2 describes the time evolution of the synchronization errors with the controller. When the controllers are added to the addressed network, one can see that the synchronization can be realized within \(T=3.7230\).

Time evolution of \(x_{1}(t)\), \(x_{2}(t)\), \(x_{3}(t)\), \(x_{4}(t)\), \(y_{1}(t)\), \(y_{2}(t)\), \(y_{3}(t)\), \(y_{4}(t)\) with controllers

Time evolution of synchronization errors \(e_{1}(t)\), \(e_{2}(t)\), \(e_{3}(t)\), \(e_{4}(t)\) with controllers
Figure 3 shows the control updates for each of the node in 2.6 seconds of the simulation, while Table 1 shows the average interevent time exhibited by each node during the simulation. It may be observed that the minimum of these values is above 0.1 s, which means that the node that updates its control input more often performs less than \(10\mbox{ updates} /s\) on average.

Instants when a control update is triggered during the time interval [0, 2.6]. The vertical positions of the markers indicate which node updates its control signal
5 Conclusions
In this paper, we have dealt with the finite-time synchronization problem of time-delayed coupled networks with event-trigger controller. Sufficient conditions have been established in terms of inequalities. And the finite-time synchronization problem is solved for the addressed networked systems with time-varying delays without Zeno behavior. Without using the finite-time stability theorem, the synchronization conditions are obtained for the systems. The numerical example has been presented to illustrate the usefulness and effectiveness of the main results obtained. Furthermore, the occurrence of time delay in the nonlinear function \(f(x_{i}(t))\) in (1) will be the subject of further study.
References
Mirollo, R., Strogatz, S.: Synchronization of pulse-coupled biological oscillators. SIAM J. Appl. Math. 50, 1645–1652 (1990)
Arenas, A., Kurths, J., Moreno, Y., Zhou, C.: Synchronization in complex networks. Phys. Rep. 469(3), 93–153 (2008)
Kocarev, L., Parlitz, U.: General approach for chaotic synchronization with applications to communication. Phys. Rev. Lett. 74, 5028–5034 (1995)
Tang, Y., Tang, Y., Gao, H., Zou, W., Kurths, J.: Distributed synchronization of coupled neural networks via randomly occurring control. IEEE Trans. Neural Netw. Learn. Syst. 24, 435–447 (2013)
Xie, X., Liu, X., Xu, H., Luo, X., Liu, G.: Synchronization of coupled reaction-diffusion neural networks: delay-dependent pinning impulsive control. Commun. Nonlinear Sci. Numer. Simul. 79, 104905 (2019)
Jiang, C., Zhang, F., Li, T.: Synchronization and antisynchronization of N-coupled fractional-order complex systems with ring connection. Math. Methods Appl. Sci. 41, 2625–2638 (2018)
Jiang, C., Zada, A., Senel, M.T.: Synchronization of bidirectional N-coupled fractional-order chaotic systems with ring connection based on antisymmetric structure. Adv. Differ. Equ. 2019, 456, 1–16 (2019)
Zhang, Y., Liu, S., Yang, R.: Global synchronization of fractional coupled networks with discrete and distributed delays. Phys. A, Stat. Mech. Appl. 514, 830–837 (2019)
Tang, Y., Wang, Z., Wong, W.K., Kurths, J., Fang, J.: Multi-objective synchronization of coupled systems. Chaos 21, 025114 (2011)
Bowong, S., Kakmeni, M., Koina, R.: Chaos synchronization and duration time of a class of uncertain chaotic systems. Math. Comput. Simul. 71, 212–228 (2006)
Yang, X., Wu, Z., Cao, J.: Finite-time synchronization of complex networks with nonidentical discontinuous nodes. Nonlinear Dyn. 73, 2313–2327 (2013)
Tang, Y.: Terminal sliding mode control for rigid robots. Automatica 34, 51–56 (1998)
Bhat, S.P., Bernstein, D.S.: Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 38, 751–766 (2000)
Aghababa, M.P., Khanohammadi, S., Alizadeh, G.: Finite-time synchronization of two different chaotic systems with unknown parameters via sliding mode technique. Appl. Math. Model. 35, 3080–3091 (2011)
Yang, X., Lu, J.: Finite-time synchronization of coupled networks with Markovian topology and impulsive effects. IEEE Trans. Autom. Control 61, 2256–2261 (2016)
Cui, W., Fang, J., Zhang, W., Wang, X.: Finite-time cluster synchronization of Markovian switching complex networks with stochastic perturbations. IET Control Theory Appl. 8, 30–41 (2014)
Wang, L., Xiao, F.: Finite-time consensus problems for networks of dynamic agents. IEEE Trans. Autom. Control 55, 950–955 (2010)
Aberkane, S.: Stochastic stabilization of a class of nonhomogeneous Markovian jump linear systems. Syst. Control Lett. 60, 156–160 (2011)
Zhang, Y., He, Y., Wu, M., et al.: Stabilization for Markovian jump systems with partial information on transition probability based on free-connection weighting matrices. Automatica 47(1), 79–84 (2011)
Zhang, L., Boukas, E.: Mode-dependent filtering for discrete-time Markovian jump linear systems with partly unknown transition probabilities. Automatica 45, 1462–1467 (2009)
Dai, Y., Cai, Y., Xu, X.: Synchronization analysis and impulsive control of complex networks with coupling delays. IET Control Theory Appl. 23, 1167–1174 (2012)
Li, H., Gao, H., Shi, P.: Passivity analysis for neural networks with discrete and distributed delays. IEEE Trans. Neural Netw. 22, 1842–1847 (2010)
Wu, Z., Shi, P., Su, H., Chu, J.: Passivity analysis for discrete-time stochastic Markovian jump neural networks with mixed time delays. IEEE Trans. Neural Netw. 22, 1566–1575 (2011)
Gilli, M.: Strange attractors in delayed cellular neural networks. IEEE Trans. Circuits Syst. I, Fundam. Theory Appl. 40, 849–853 (1993)
Wei, Y., Park, J.H., RezaKarimi, H., Chu, J.: Improved stability and stabilization results for stochastic synchronization of continuous-time semi-Markovian jump neural networks with time-varying delay. IEEE Trans. Neural Netw. Learn. Syst. 29, 2488–2501 (2018)
Zhang, W., Tang, Y., Fang, J.: Exponential cluster synchronization of impulsive delayed genetic oscillators with external disturbances. Chaos 21, 043137 (2011)
Cao, J., Wang, Z., Sun, Y.: Synchronization in an array of linearly stochastically coupled networks with time delays. Physica A 382, 718–728 (2007)
Liang, J., Wang, Z., Liu, Y., Liu, X.: Global synchronization control of general delayed discrete-time networks with stochastic coupling and disturbance. IEEE Trans. Syst. Man Cybern. B 38, 1073–1083 (2008)
Efimov, D., Polyakov, A., Fridman, E., Perruquetti, W., Richard, J.P.: Comments on finite-time stability of time-delay systems. Automatica 50, 1944–1947 (2014)
Liu, T., Cao, M., Persis, C.D., Hendrickx, J.M.: Distributed event-triggered control for asymptotic synchronization of dynamical networks. Automatica 86, 199–204 (2017)
Astrom, K.J., Wittenmark, B.: Computer Controlled Systems, pp. 30–40. Prentice Hall, New York (1997)
Heemels, W.P.M.H., Johansson, K.H., Tabuada, P.: An introduction to event-triggered and self-triggered control. In: IEEE Conference on Decision and Control, vol. 22, pp. 3270–3285 (2012)
Demir, O., Lunze, J.: Event-based synchronization of multi-agent systems. In: IFAC Conf. on Analysis and Design of Hybrid Systems, pp. 1–6 (2012)
Garcia, E., Cao, Y., Wang, X., Casbeer, D.: Decentralized event-triggered consensus of linear multi-agent systems under directed graphs. In: American Control Conference, pp. 5764–5769 (2015)
Liu, T., Cao, M., Persis, C., De, C., Hendrickx, J.M.: Distributed event-triggered control for synchronization of danamical networks with estimators. In: IFAC Workshop on Distributed Estimation and Control in Networked Systems, pp. 116–121 (2013)
Meng, X., Chen, T.: Event based agreement protocols for multi-agent networks. Automatica 49, 2125–2132 (2013)
Acknowledgements
We express great gratitude to the editor and the anonymous reviewers for your hard work in improving this article.
Availability of data and materials
Data sharing not applicable to this article as no datasets were generated or analysed during the current study.
Funding
This paper was supported by the National Natural Science Foundation of China (Grant No. 61673257, 61503238).
Author information
Authors and Affiliations
Contributions
WC deduced and calculated the results and wrote the paper, WJ drew the figures of the example, ZW polished up the English writing of the paper. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that no conflict of interest exists.
Additional information
Wenxia Cui and Zhenjie Wang contributed equally to this work.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Cui, W., Jin, W. & Wang, Z. Novel finite-time synchronization criteria for coupled network systems with time-varying delays via event-triggered control. Adv Differ Equ 2020, 388 (2020). https://doi.org/10.1186/s13662-020-02649-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-020-02649-2