
Abstract
This paper discusses the synchronization problem of N-coupled fractional-order chaotic systems with ring connection via bidirectional coupling. On the basis of the direct design method, we design the appropriate controllers to transform the fractional-order error dynamical system into a nonlinear system with antisymmetric structure. By choosing appropriate fractional-order Lyapunov functions and employing the fractional-order Lyapunov-based stability theory, several sufficient conditions are obtained to ensure the asymptotical stabilization of the fractional-order error system at the origin. The proposed method is universal, simple, and theoretically rigorous. Finally, some numerical examples are presented to illustrate the validity of theoretical results.
Similar content being viewed by others

1 Introduction
In recent years, more and more attention has been diverted towards the study of fractional-order chaotic systems due to their potential applications in the fields of secure communication, encryption, signal and control processing [1,2,3,4,5]. Various fractional-order dynamical systems, such as the fractional-order Lorenz system [6], the fractional-order Lü system [7], the fractional-order financial system [8], the fractional-order permanent magnet synchronous motor (PMSM) system [9], the fractional-order Rabinovich system [10], the fractional-order microscopic chemical system [11], the fractional-order hyperchaotic PWC system [12], have chaotic or hyperchaotic behavior. Meanwhile, several different types of synchronization for fractional-order chaotic systems have been observed and developed in the previous works. For instance, complete synchronization [13], phase synchronization [14], impulsive synchronization [15], and lag projective synchronization [16], just to enumerate a few examples.
Coupled chaotic systems, as a special class of nonlinear systems, have been extensively studied in theoretical physics and other fields of natural sciences and engineering. Multiple chaotic systems can be coupled in a ring which makes them correlative. Synchronization of coupled chaotic systems with ring connection extends the traditional mode of synchronization from one-to-one into one-to-many. Then this synchronization is realized at lower cost and has better flexibility and practicability. In the meantime, this method provides the possibility to realize simultaneous multiparty communications. Therefore, many researchers have paid attention to investigate synchronization of coupled chaotic systems with ring connection. For instance, in [17], it was shown that chaos synchronization of three coupled oscillators with ring connection was accomplished. Yu and Zhang [18] realized global synchronization of three coupled chaotic systems with ring connection. The adaptive synchronization method for coupled systems was proposed for multi-Lorenz systems family in [19]. Based on special antisymmetric structure, Chen et al. [20] studied synchronization of N-coupled integer-order chaotic systems via unidirectional coupling. With respect to other recent representative works on this topic, we refer the reader to [21,22,23,24,25] and the references cited therein.
Most of the above-mentioned works mainly focused on the coupled integer-order chaotic systems, not involving coupled fractional-order chaotic systems. Compared with the integer-order chaotic systems, the fractional-order chaotic systems can display much richer dynamical behaviors and therefore they are considered as the powerful tools in secure communication for their capability of improving the security of chaotic communication systems. As a result, it is meaningful and challenging to explore various synchronization schemes of coupled fractional-order chaotic systems with ring connection. As is well-known, N fractional-order chaotic systems with ring connection can be coupled in the unidirectional and bidirectional ways, which are two typical coupling cases. Zhou and Li [26] presented the theory for synchronization problems in an ω-symmetrically coupled fractional differential system. Synchronization of N-coupled fractional-order chaotic systems with unidirectional coupling and bidirectional coupling was studied in [27, 28]. Ouannas et al. [29] investigated Q-S synchronization in coupled chaotic incommensurate fractional-order systems. As shown in [30], synchronization of unidirectional N-coupled fractional-order chaotic systems can be derived. However, there are two problems to be addressed: one is shall we design the general controllers to achieve synchronization of the N-coupled fractional-order chaotic systems with ring connection via bidirectional coupling; the other is how to transform the fractional-order error system into a special antisymmetric structure. As far as we know, there is little work with consideration of these two problems.
On the basis of the above discussion, this paper is concerned with synchronization of bidirectional N-coupled fractional-order chaotic systems with ring connection. By virtue of the direct method, the general controllers are designed to transform the fractional-order error system into a nonlinear system with special antisymmetric structure and achieve synchronization via bidirectional coupling, which extends the existing results proposed in [27]. Noticeably, fractional-order Lyapunov functions are constructed to analyze the stability of fractional-order error dynamical systems, which is different from the synchronization schemes proposed in the previous literature.
The remainder of this paper is organized as follows. In the next section, some preliminaries are presented. Section 3 designs the general controllers to achieve synchronization of N-coupled fractional-order chaotic system via bidirectional coupling. Section 4 provides numerical examples to exhibit the feasibility and effectiveness of the proposed control technique. Finally, conclusions are drawn in Sect. 5.
2 Preliminaries
Fractional calculus is a generalization of integration and differentiation to arbitrary noninteger orders. Several existing definitions of fractional derivatives are given in [31], where the Caputo definition is used in engineering applications extensively. We firstly introduce the following Caputo definition.
Definition 1
(see [31])
For a function f, the Caputo fractional derivative of fractional-order α is defined as follows:
where \(m-1<\alpha<m\), \(m=[\alpha]+1\), \([\alpha]\) denotes the integer part of α, Γ stands for gamma function, and \(D^{\alpha}\) is generally called α-order Caputo differential operator.
The main advantage of Caputo definition is that Caputo derivative of a constant is equal to zero. Throughout, the fractional-order chaotic systems will be described by utilizing Caputo definition with lower limit of integral \(t_{0}=0\) and the order \(0<\alpha<1\).
From Definition 1, it is clear that the Caputo fractional derivative satisfies the linearity property
where λ and μ are real constants.
The property for Caputo fractional derivative of a general quadratic function is stated as follows.
Lemma 1
(see [32])
Assume that \(\alpha\in(0,1]\), \(x(t)=(x_{1}(t),x_{2}(t),\ldots ,x_{n}(t))\in\mathbb{R}^{n}\) and \(x_{i}(t)\) (\(i=1,2,\ldots,n\)) are continuous and derivable functions. Then
for any time instant \(t>0\), where \(P\in\mathbb{R}^{n\times{n}}\) is a positive definite matrix.
There are some stability results for various classes of fractional-order systems [33, 34]. Next, we recall the following useful results of the Lyapunov-based stability theory.
Definition 2
(see [33])
A continuous function \(\gamma: [0,t)\rightarrow[0,\infty)\) is said to be the class-K function if it is strictly increasing and \(\gamma(0)=0\).
Lemma 2
(see [33])
Suppose that \(x(t)=0\) is the equilibrium point of the fractional-order system \(D^{\alpha}x(t)=f(x,t)\), \(x\in\mathbb{R}^{n}\), where \(0<\alpha<1\). If there exist a Lyapunov function \(V(t,x(t))\) and three class-K functions \(\gamma_{i}\) (\(i=1,2,3\)) satisfying
then \(x(t)=0\) is asymptotically stable.
3 Synchronization scheme
Consider a general form of N fractional-order chaotic systems which can be expressed as
where \(X_{1},X_{2}, \ldots, X_{N}\in{\mathbb{R}^{n}}\) (\(N>2\)) are the state vectors of the chaotic systems; \(A_{1}, A_{2},\ldots, A_{N}\in{\mathbb{R}^{n\times{n}}}\) are constant matrices (\(A_{i}\neq A_{j}\), \(i\neq j\)); \(G_{i}(X_{i})\) (\(i=1,2,\ldots,N\)) are the continuous nonlinear functions (\(G_{i}\neq G_{j}\), \(i\neq j\)). Then, the structure for ring connection between N systems via bidirectional coupling is displayed in Fig. 1. Therefore, a bidirectional coupling scheme among N fractional-order chaotic systems (1) with ring connection can be expressed as follows:
where \(Q_{i}=\operatorname{diag}(q_{i1},q_{i2},\ldots,q_{in})\) are n-dimensional diagonal matrices and \(q_{ij}\geq0\) are the ideal gains which represent the coupled parameters.

The coupled mode of N systems via bidirectional coupling
Suppose that the first system is chosen as the aim system, and add the controller to the remaining systems. Thus, model (2) takes the form
Define the synchronization error vectors as \(e_{i}=X_{i+1}-X_{i}\in {\mathbb{R}^{n}} \) (\(i=1,2,\ldots,N-1\)). Then we have the error system
Taking into account system (3), we can obtain the error dynamical system as follows:
where
The objective of this paper is to find the suitable and effective controllers \(U_{i}\) (\(i=1,2,\ldots,N-1\)) such that the error dynamical system (4) is not only transformed into a nonlinear system with antisymmetric structure but also asymptotically stable at the origin. That is, we can achieve synchronization of bidirectional N-coupled fractional-order chaotic systems with ring connection based on antisymmetric structure.
In [35,36,37], the authors proposed a direct design method to achieve chaos synchronization. Two advantages of this method are to present an easy procedure for choosing proper controllers in chaos synchronization and construct simple controllers easily to implement. Therefore, in this paper, this method is used to realize our objective.
First, the controllers \(U_{i}\) are chosen as
where
and Θ is a coefficient matrix. Then, the error dynamical system (4) can be represented as
where
Clearly, there are many possible choices for Θ to guarantee that the error dynamical system (7) is asymptotically stable at the origin. Without loss of generality, Θ is defined by a state dependent coefficient matrix. As a result, the sufficient stability conditions of system (7) are obtained by transforming it into a stable system with antisymmetric structure. The main result is shown in the following.
Theorem 1
Synchronization of bidirectional N-coupled fractional-order system (3) can be achieved by utilizing the control laws in equation (5), if the state dependent coefficient matrix \(\varPhi(t)=\varPhi_{1}(t)+\varPhi _{2}\) satisfies the hypotheses
where \(\varphi_{i}=\operatorname{diag}(\varphi_{i1},\varphi_{i2},\ldots,\varphi _{in})\) (\(i=1,2,\ldots,N-1\)) and \(\varphi_{ij}>0\) (\(j=1,2,\ldots,n\)).
Proof
Consider a positive definite Lyapunov candidate function as
Calculating the Caputo derivative of \(V(e,t)\), we derive from Lemma 1 and system (7) that
Substituting (8) into the latter inequality, one can conclude that
where \(\varphi_{\min}=\min_{1\leq i\leq N, 1\leq j \leq n}\{ \varphi_{ij}\}\). An application of Lemma 2 yields that the closed-loop system (7) is globally asymptotically stable. Therefore, synchronization of bidirectional N-coupled fractional-order chaotic system (3) is accomplished. This completes the proof. □
As a consequence of Theorem 1, we can obtain the following corollary.
Corollary 1
If the structures of general fractional-order chaotic systems are identical, i.e., \(A_{i}=A_{j}=A\) and \(G_{i}(\cdot)=G_{j}(\cdot)=G(\cdot)\), then the controllers \(U_{i}\) can be designed as
where \(V_{i}\) (\(i=1,2,\ldots,N-1\)) are defined as in (6) and Θ is a coefficient matrix. Similarly to the aforementioned discussion, we can achieve synchronization of bidirectional N-coupled identical fractional-order chaotic systems with ring connection based on antisymmetric structure.
Remark 1
The fractional-order error dynamical system (4) is transformed into system (7) by virtue of the control laws \(U_{i}\). Furthermore, system (7) can be transformed into a stable system by choosing the appropriate coefficient matrix Θ which ensures that \(\varPhi(t)\) is an antisymmetric structure. Therefore, selecting of the coefficient matrices plays an important role in achieving synchronization of bidirectional N-coupled fractional-order chaotic systems with ring connection.
4 Numerical simulations
To illustrate the effectiveness of the proposed synchronization scheme, two groups of examples are considered and their numerical simulations are performed. Two cases including 3-coupled identical and nonidentical fractional-order chaotic systems are investigated, respectively.
4.1 Synchronization of 3-coupled identical fractional-order chaotic systems
In this case, we consider synchronization of 3-coupled fractional-order Lü systems via bidirectional coupling. Lü system connects Lorenz system and Chen system and represents the transition from one to the other. In 2006, Lu studied the chaotic dynamics of fractional-order Lü system and found that the lowest order for this system to have chaos is 0.3; see [7] for more details. The bidirectional 3-coupled fractional-order Lü systems with designed controllers are introduced in the form as
and
where
\(Q_{1}=\operatorname{diag}(q_{11},q_{12},q_{13})\), \(Q_{2}=\operatorname{diag}(q_{21},q_{22},q_{23})\), \(Q_{3}=\operatorname{diag}(q_{31},q_{32},q_{33})\) are the coupled matrices, \(U_{1}=(u_{11},u_{12},u_{13})^{T}\) and \(U_{2}=(u_{21},u_{22},u_{23})^{T}\) are the control inputs.
Next, we consider the synchronization error vectors \(e_{i}=X_{i+1}-X_{i}\) (\(i=1,2\)) and obtain the error dynamical system as follows:
where
Choosing the coefficient matrix
as follows:
we can design the controllers \(U_{1}\) and \(U_{2}\) as
Then, we obtain the error system as \(D^{\alpha}e(t)=(\varPhi_{1}(t)+\varPhi_{2})e(t)\), where \(\varPhi_{2}= \operatorname{diag}(-a-2q_{11}-q_{21},b-2q_{12}-q_{22},-c-2q_{13}-q_{23},-a-2q_{31}-q_{21},b-2q_{32}-q_{22}, -c-2q_{33}-q_{23})\) and
Assume that conditions
are satisfied. Thus, according to Corollary 1, the error system is asymptotically stable with the controllers \(U_{1}\) and \(U_{2}\). That is, synchronization of 3-coupled fractional-order Lü systems via bidirectional coupling is accomplished.
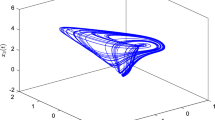
The Adams–Bashforth–Moulton predictor-corrector scheme [38] is used to obtain the simulation results illustrated with the initial condition \(X_{1}(0)=(1,2,3)^{T}\), \(X_{2}(0)=(30,9,-10)^{T}\), \(X_{3}(0)=(4,30,2)^{T}\), and \(\alpha=0.96\). The fractional-order Lü system with \((a,b,c)=(35,28,3)\) can generate chaotic attractor; see Fig. 2. Further, selecting \(q_{11}=q_{13}=q_{21}=q_{23}=q_{33}=2\), \(q_{12}=q_{22}=23\), \(q_{31}=5\), and \(q_{32}=26\), we obtain simulation results as displayed in Figs. 3 and 4. The state variables of the fractional-order Lü system with designed controllers are demonstrated in Fig. 3. Figure 4 illustrates that the errors of synchronization converge asymptotically to zero in a quite short period, i.e., synchronization of bidirectional 3-coupled fractional-order Lü systems can be realized.

Chaotic attractors of the fractional-order Lü system

The state trajectories \(x_{i1}\), \(x_{i2}\), and \(x_{i3}\) (\(i=1,2,3\)) of the fractional-order Lü system

The error dynamics of synchronization among three fractional-order Lü systems
4.2 Synchronization of 3-coupled nonidentical fractional-order chaotic systems
In the following, we consider synchronization of 3-coupled nonidentical fractional-order chaotic systems, which are the fractional-order Lorenz system [6], the fractional-order financial system [8], and the fractional-order PMSM system [9]. They are expressed as
and
where
\(Q_{1}=\operatorname{diag}(q_{11},q_{12},q_{13})\), \(Q_{2}= \operatorname{diag}(q_{21},q_{22},q_{23})\), \(Q_{3}=\operatorname{diag}(q_{31},q_{32},q_{33})\) are the coupled matrices, \(U_{1}=(u_{11},u_{12},u_{13})^{T}\) and \(U_{2}=(u_{21},u_{22},u_{23})^{T}\) are the control inputs. Let \(\alpha=0.99\), \((a_{1},a_{2},a_{3})=(10,28,8/3)\), \((b_{1},b_{2},b_{3})=(3,0.1,1)\), and \((c_{1},c_{2})=(50,4)\). In the absence of the controllers, fractional-order systems (9)–(11) without the coupling terms behave chaotically as shown in Fig. 5; see [6, 8, 9] for more details.

The synchronization error can be presented as \(e_{i}=X_{i+1}-X_{i}\) (\(i=1,2\)). Then, in view of systems (9)–(11), the error dynamical system reduces to
where
Choosing the coefficient matrix
as follows:
we can design the controllers in the form
and
Then, we have the error system as \(D^{\alpha}e(t)=(\varPhi_{1}(t)+\varPhi_{2})e(t)\), where \(\varPhi_{2}= \operatorname{diag}(-b_{1}-2q_{11}-q_{21},-b_{2}-2q_{12}-q_{22},-b_{3}-2q_{13}-q_{23},-1-2q_{31}-q_{21},-1-2q_{32}-q_{22}, -c_{2}-2q_{33}-q_{23})\) and
If conditions
are satisfied, then the error system is asymptotically stable under the designed controllers by means of Theorem 1. Hence, synchronization of systems (9)–(11) is realized.
The simulation results are illustrated with the initial condition \(X_{1}(0)=(1,4,5)^{T}\), \(X_{2}(0)=(2,3,2)^{T}\), \(X_{3}(0)=(6,2,4)^{T}\), and \(\alpha=0.99\). Furthermore, selecting \(q_{11}=q_{12}=q_{13}=2\), \(q_{21}=q_{22}=q_{23}=5\), \(q_{11}=q_{12}=q_{13}=q_{31}=q_{32}=q_{33}=8\), we obtain simulation results as displayed in Figs. 6 and 7. Figure 6 shows the state variables of the 3-coupled fractional-order systems (9)–(11). From Fig. 7, it is clear that the errors of synchronization converge asymptotically to zero in a quite short period. As expected, synchronization of bidirectional 3-coupled nonidentical fractional-order chaotic systems can be realized.


5 Conclusions
In this paper, we introduce, analyze, and validate synchronization of N-coupled fractional-order chaotic systems with ring connection by utilizing the bidirectional coupling. By virtue of the direct design method, the proper controllers are designed to transform the fractional-order error dynamical system into a nonlinear system with antisymmetric structure. Thus, on the basis of quadratic Lyapunov functions and the Lyapunov stability theory of fractional-order systems, we obtain several sufficient conditions which ensure the occurrence of synchronization among N-coupled fractional-order chaotic systems. Additionally, the synchronization scheme is applicable to all fractional-order chaotic systems, including those that can exhibit hyperchaotic behavior. Furthermore, the proposed results pave the way for new directions in the study of various kinds of chaos synchronization among N-coupled fractional-order systems with ring connection. For example, considering the unknown parameters, external disturbances, and the effect of noise on such synchronization schemes would be interesting and valuable directions for future work.
References
Muthukumar, P., Balasubramaniam, P., Ratnavelu, K.: Synchronization and an application of a novel fractional order King Cobra chaotic system. Chaos 24(3), Article ID 033105 (2014)
Zhao, J., Wang, S., Chang, Y., Li, X.: A novel image encryption scheme based on an improper fractional-order chaotic system. Nonlinear Dyn. 80(4), 1721–1729 (2015)
Kassim, S., Hamiche, H., Djennoune, S., Bettayeb, M.: A novel secure image transmission scheme based on synchronization of fractional-order discrete-time hyperchaotic systems. Nonlinear Dyn. 88(4), 2473–2489 (2017)
Li, T., Yang, M., Wu, J., Jing, X.: A novel image encryption algorithm based on a fractional-order hyperchaotic system and DNA computing. Complexity 2017, Article ID 9010251 (2017)
Liu, Z., Xia, T., Wang, J.: Fractional two-dimensional discrete chaotic map and its applications to the information security with elliptic-curve public key cryptography. J. Vib. Control 24(20), 4797–4824 (2018)
Grigorenko, I., Grigorenko, E.: Chaotic dynamics of the fractional Lorenz system. Phys. Rev. Lett. 91(3), Article ID 034101 (2003)
Lu, J.G.: Chaotic dynamics of the fractional-order Lü system and its synchronization. Phys. Lett. A 354(4), 305–311 (2006)
Chen, W.-C.: Nonlinear dynamics and chaos in a fractional-order financial system. Chaos Solitons Fractals 36(5), 1305–1314 (2008)
Li, C.-L., Yu, S.-M., Luo, X.-S.: Fractional-order permanent magnet synchronous motor and its adaptive chaotic control. Chin. Phys. B 21(10), Article ID 100506 (2012)
He, J., Chen, F.: Dynamical analysis of a new fractional-order Rabinovich system and its fractional matrix projective synchronization. Chin. J. Phys. 56(5), 2627–2637 (2018)
He, S., Banerjee, S., Sun, K.: Complex dynamics and multiple coexisting attractors in a fractional-order microscopic chemical system. Eur. Phys. J. Spec. Top. 228, 195–207 (2019)
Danca, M.-F., Fečkan, M., Kuznetsov, N.V., Chen, G.: Complex dynamics, hidden attractors and continuous approximation of a fractional-order hyperchaotic PWC system. Nonlinear Dyn. 91(4), 2523–2540 (2018)
Agrawal, S.K., Srivastava, M., Das, S.: Synchronization of fractional order chaotic systems using active control method. Chaos Solitons Fractals 45(6), 737–752 (2012)
Taghvafard, H., Erjaee, G.H.: Phase and anti-phase synchronization of fractional order chaotic systems via active control. Commun. Nonlinear Sci. Numer. Simul. 16(10), 4079–4088 (2011)
Li, D., Zhang, X.: Impulsive synchronization of fractional order chaotic systems with time-delay. Neurocomputing 216(5), 39–44 (2016)
Zhang, W., Cao, J., Wu, R., Alsaadi, F.E., Alsaedi, A.: Lag projective synchronization of fractional-order delayed chaotic systems. J. Franklin Inst. 356(3), 1522–1534 (2019)
Kyprianidis, I.M., Stouboulos, I.N.: Chaotic synchronization of three coupled oscillators with ring connection. Chaos Solitons Fractals 17(2), 327–336 (2003)
Yu, Y., Zhang, S.: Global synchronization of three coupled chaotic systems with ring connection. Chaos Solitons Fractals 24(5), 1233–1242 (2005)
Lu, J.-A., Han, X.-P., Li, Y.-T., Yu, M.-H.: Adaptive coupled synchronization among multi-Lorenz systems family. Chaos Solitons Fractals 31(4), 866–878 (2007)
Chen, X., Qiu, J., Song, Q., Zhang, A.: Synchronization of N coupled chaotic systems with ring connection based on special antisymmetric structure. Abstr. Appl. Anal. 2013, Article ID 680604 (2013)
Chen, X., Wang, C., Qiu, J.: Synchronization and anti-synchronization of N different coupled chaotic systems with ring connection. Int. J. Mod. Phys. C 25(5), Article ID 1440011 (2014)
Chen, X., Qiu, J., Cao, J., He, H.: Hybrid synchronization behavior in an array of coupled chaotic systems with ring connection. Neurocomputing 173, 1299–1309 (2016)
Chen, X., Cao, J., Park, J.H., Zong, G., Qiu, J.: Finite-time complex function synchronization of multiple complex-variable chaotic systems with network transmission and combination mode. J. Vib. Control 24(22), 5461–5471 (2018)
Chen, X., Huang, T., Cao, J., Park, J.H., Qiu, J.: Finite-time multi-switching sliding mode synchronisation for multiple uncertain complex chaotic systems with network transmission mode. IET Control Theory Appl. 13(9), 1246–1257 (2019)
Chen, X., Qiu, J., Cao, J., He, H.: Adaptive synchronization of multiple uncertain coupled chaotic systems via sliding mode control. Neurocomputing 273(17), 9–21 (2018)
Zhou, T., Li, C.: Synchronization in fractional-order differential systems. Physica D 212(1–2), 111–125 (2005)
Tang, Y., Fang, J.-A.: Synchronization of N-coupled fractional-order chaotic systems with ring connection. Commun. Nonlinear Sci. Numer. Simul. 15(2), 401–412 (2010)
Delshad, S.S., Asheghan, M.M., Beheshti, M.H.: Synchronization of N-coupled incommensurate fractional-order chaotic systems with ring connection. Commun. Nonlinear Sci. Numer. Simul. 16(9), 3815–3824 (2011)
Ouannas, A., Odibat, Z., Alsaedi, A., Hobiny, A., Hayat, T.: Investigation of Q-S synchronization in coupled chaotic incommensurate fractional order systems. Chin. J. Phys. 56(5), 1940–1948 (2018)
Jiang, C., Zhang, F., Li, T.: Synchronization and antisynchronization of N-coupled fractional-order complex chaotic systems with ring connection. Math. Methods Appl. Sci. 41(7), 2625–2638 (2018)
Podlubny, I.: Fractional Differential Equations. Academic Press, New York (1999)
Liang, S., Wu, R., Chen, L.: Adaptive pinning synchronization in fractional-order uncertain complex dynamical networks with delay. Physica A 444, 49–62 (2016)
Li, Y., Chen, Y.Q., Podlubny, I.: Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag-Leffler stability. Comput. Math. Appl. 59(5), 1810–1821 (2010)
Hristova, S., Tunç, C.: Stability of nonlinear Volterra integro-differential equations with Caputo fractional derivative and bounded delays. Electron. J. Differ. Equ. 2019, Article ID 30 (2019)
Cai, N., Jing, Y., Zhang, S.: Generalized projective synchronization of different chaotic systems based on antisymmetric structure. Chaos Solitons Fractals 42(2), 1190–1196 (2009)
Liu, B., Zhou, Y., Jiang, M., Zhang, Z.: Synchronizing chaotic systems using control based on tridiagonal structure. Chaos Solitons Fractals 39(5), 2274–2281 (2009)
Liu, B., Zhang, Z.-K.: Stability of nonlinear systems with tridiagonal structure and its applications. Acta Autom. Sin. 33(4), 442–445 (2007)
Diethelm, K., Ford, N.J., Freed, A.D.: A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn. 29(1–4), 3–22 (2002)
Acknowledgements
The authors express their sincere gratitude to the editors and two anonymous referees for the careful reading of the original manuscript and useful comments that helped to improve the presentation of the results and accentuate important details in the text.
Availability of data and materials
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
Funding
This work is supported by the National Natural Science Foundation of P.R. China (Grant No. 61503171), China Postdoctoral Science Foundation (Grant No. 2015M582091), Natural Science Foundation of Shandong Province (Grant No. ZR2016JL021), Key Research and Development Program of Shandong Province (Grant Nos. 2019GNC106027 and 2019GGX101003), Scientific Research Plan of Universities in Shandong Province (Grant No. J18KA352), and Doctoral Scientific Research Foundation of Qilu University of Technology (Shandong Academy of Sciences) (Grant No. 81110240).
Author information
Authors and Affiliations
Contributions
All four authors contributed equally to this work. They all read and approved the final version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Jiang, C., Zada, A., Şenel, M.T. et al. Synchronization of bidirectional N-coupled fractional-order chaotic systems with ring connection based on antisymmetric structure. Adv Differ Equ 2019, 456 (2019). https://doi.org/10.1186/s13662-019-2380-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-019-2380-1