
Abstract
The exact solution of fractional telegraph partial differential equation of nonlocal boundary value problem is obtained. The theorem of stability estimates is presented for this equation. Difference schemes are constructed for both the implicit finite difference scheme and the Dufort–Frankel finite difference scheme (DFFDS). The stability of these difference schemes for this problem are proved. With the help of these methods, numerical solutions of the fractional telegraph differential equation defined by Caputo fractional derivative for fractional orders \(\alpha=0.1, 0.5, 0.9\) are calculated. Numerical results are compared with the exact solution and the accuracy and effectiveness of the proposed methods are investigated.
Similar content being viewed by others


1 Introduction
Fractional differential equations lead to various significant applications in engineering, finance, physics, biology and seismology [1–4]. The present differential equation is solvable with respect to variables time and space. Some difference schemes are presented for the space-fractional heat equations in [5–7]. In [8, 9], the time-fractional equations are investigated. The solutions of fractional difference equations are obtained by different methods, which include the differential transform method [10], the exponential-function method [11], the variation iteration method [12], the homotopy perturbation method [13], the fractional sub-equation method [14] and analytical solutions in terms of the Mittag–Leffler function [15]. In developing those methods the usually used fractional derivative is Caputo derivative [16], Riemann–Liouville (R–L) [16], Jumarie’s left handed modification of R–L fractional derivative [17, 18]. In this paper, Caputo time fractional derivative is used. In [15], an algorithm was developed to solve the homogeneous fractional-order differential equations in terms of the Mittag–Leffler function and fractional sine and cosine functions. In [19], by finite difference and iteration methods, a fractional hyperbolic partial differential equation with the Neumann condition for \(\alpha =\frac{1}{2}\) was studied. In [20], the theta method was used for time-fractional differential diffusion equation. In [21, 22], differential equations were investigated by the nonlocal boundary problem. Yuan and Chen [23] worked on an expanded mixed finite element method for the two-sided time-dependent fractional diffusion problem with two-sided Riemann–Liouville fractional derivatives. In [24–28], alternative approaches were proposed to the corresponding fractional differential equations.
In the present paper, we shall investigate the following fractional telegraph partial differential equations for nonlocal boundary value problem:
Implicit and Dufort–Frankel difference scheme methods (IFDS and DFFDS methods, respectively) are used to obtain numerical results for the problem (1) with the nonlocal conditions. Then we shall investigate the stability estimates of these methods.
In the literature, the notions of gamma function, Caputo fractional derivative and first-order approach method are defined as follows.
Definition 1
([29])
For all complex numbers except the non-positive integers, the definition of the gamma function is given by
Definition 2
The Caputo fractional derivative \(D_{t}^{\alpha }u(t,x)\) of order α with respect to time is defined as
and for \(\alpha =n\in N\) is defined as
Definition 3
The first-order approach method for the calculation of the problem (3) is given by the formula
where \(g_{\alpha ,\tau }=\frac{1}{\Gamma (2-\alpha )\tau ^{\alpha }}\) and \(w_{j}^{(\alpha )}=j^{1-\alpha }-(j-1)^{1-\alpha }\). Using these values, one has the following approximation [30]:
For more details of the above definitions, we refer to [16, 31]. This paper is organized as follows. In Sect. 2, the exact solution of the given problem is shown and the stability estimates are presented. In Sect. 3, IFDS and DFFDS for solving fractional partial differential equation are introduced. In Sect. 4, the error estimates of the IFDS and DFFDS schemes for a test example are shown and numerical results are investigated. In Sect. 5, the results of our paper are discussed.
2 Solution and stability estimates of the abstract form for fractional telegraph equation
Using the method [32, 33], we rewrite Eq. (1) in the following abstract form:
in a Hilbert space \(H=L_{2}[0,L]\) with a self-adjoint positive definite operator A, A \(\geq \delta I\) and \(\delta >0\). Here \(f(t)=f(t,x)\) is given abstract function defined on \([0,T]\) with values in \(H=L_{2}[0,L]\). \(\varphi =\varphi (x)\) and \(\psi =\psi (x)\) are the elements of \(H=L_{2}[0,L]\). \(u(t)=u(t,x)\) is the unknown abstract function defined on \([0,T]\) with values in \(H=L_{2}[0,L]\).
\(A:D(A)\rightarrow H\) is the differential operator defined by
with domain
Here, \(F(t)=f(t)-D_{t}^{\alpha }u(t)\).
A function \(u(t)\) is called a solution of the problem (6) if the following conditions are satisfied:
-
(i)
\(u(t)\) is a twice continuously differentiable on the interval \([0,T]\). The derivatives at the endpoints of the interval are understood as the appropriate unilateral derivatives.
-
(ii)
The value of \(u(t)\) relates to \(D(A)\) for all \(t\in {}[ 0,T]\) and the function \(Au(t)\) is continuous on the interval \([0,T]\).
-
(iii)
\(u(t)\) satisfies both the equation and the boundary conditions (6).
Now, we shall obtain the formula for the solution of the problem (6). For this purpose, we can rewrite the problem (6) in the following the first-order differential equations systems form:
where \(B=A^{1/2}\). Here, \(z(t)\) is a continuously differentiable on the interval \([0,T]\). Integrating Eq. (7), we get
Applying the initial condition \(z(0)=u^{\prime }(0)+iBu(0)\), we can obtain
By an interchange of the order of integration, we can write
Then we obtain
where
Using Eq. (8) and the formula \(F(t)=f(t)-D_{t}^{\alpha }u(t)\), we obtain
From Eq. (9), it follows that
and from that we obtain
where \(D_{0^{+}}^{\alpha }u(0)=[D_{t}^{\alpha }u(t)]_{t=0}\). Applying Eqs. (9), (10) and the conditions \(u(0)=\lambda u(T)+\varphi \), \(u^{\prime }(0)=\mu u^{\prime }(T)+\psi \), we get
We shall obtain \(u(0)\) and \(u^{\prime }(0)\). We have
Using the fact that
we have
The assumption that
implies that
Using the operator P, solving Δ and (9), we obtain
and
Consequently, using Eqs. (9), (10), (15) and (16), we obtain the solution of the problem (6):
Thus, we write
Using the following formula for the fractional derivative of order \(0<\alpha <1\):
we get
Lemma 2.1
Suppose that \(\varphi \in D(A)\), \(\psi \in D(A^{1/2})\), \(D_{t}^{\alpha }u(t)\) and \(f(t)\) are continuously differentiable on \([ 0,T ] \) and assumption (14) holds. Then the following stability inequalities for Eqs. (15), (16) and (19) are true simultaneously:
where \(M_{1}\), \(M_{2}\), \(M_{3}\) do not depend on \(f(t)\), \(t\in {}[ 0,T]\), φ, and ψ.
Proof
Firstly, we shall prove (20). Using Eq. (18), applying the triangle inequality to Eq. (19), and by the formula changing integral order and the inequalities
it follows that
By a straightforward computation, we find
and
Putting (25) and (26) in (24), it follows that
for any \(0\leq t\leq T\). Consequently, it is obvious that
Using the estimate (27), we obtain
Secondly, we shall prove Eq. (21). Using Eqs. (15) and applying the triangle inequality, we obtain
Using Eqs. (20) and (23), we have
Finally, we shall show that Eq. (22) is true. Using Eqs. (16) and applying the triangle inequality, we get
Using Eqs. (20) and (23), we obtain
Thus, the proof of the lemma is completed. □
Theorem 2.2
Let \(\varphi \in D(A)\), \(\psi \in D(A^{1/2})\) and \(f(t)\) be continuously differentiable on \([ 0,T ] \) and assumption (14) holds. Then there exists a unique solution of problem (6) and the following stability inequalities hold:
where \(M_{4}\), \(M_{5}\), \(M_{6}\) do not depend on \(f(t)\), \(t\in {}[ 0,T]\), φ, and ψ.
Proof
Using (17) and the estimates (20) and (23), we obtain the following estimates:
for any \(t\in {}[ 0,T]\).
Hence, we obtain
Applying \(A^{\frac{1}{2}}\) to the estimates (32) and using the estimates (23), we obtain
for any \(t\in [ 0,T]\).
Now, we shall obtain an estimate for \(\Vert Au(t) \Vert _{H}\). Applying A to Eq. (9) and using an integration by parts, we can write the formula as
Using the previous formula and the estimate (23), we obtain
Applying \(A^{\frac{1}{2}}\) to the formulas \(\Vert A^{1/2}u(0) \Vert _{H}\), \(\Vert {A}^{\frac{1}{2}}u^{\prime }(0)\Vert _{H}\) and \(\Vert D_{t}^{\alpha }u(t) \Vert _{H}\), we obtain
for any \(t\in {}[ 0,T]\).
Then we get
The estimate (31) follows from the estimates (34). Finally, the estimate for \(\max_{0\leq t\leq T} \Vert \,\frac{d^{2}u}{dt^{2}} \Vert _{H}\) follows from the previous estimate and the triangle inequality, which completes the proof of the theorem. □
3 Discretization of two numerical methods
The first method used in this section is the IFDS method. For this method, let us suppose that \(h=\frac{L}{M}\) for the x-axis and \(\tau =\frac{T}{N}\) for the t-axis as grid mess, then we get
Using the method of [34] and the discrete formula (4) for the fractional partial differential equation (1), we construct the following difference schemes:
The second method used in this section is DFFDS. The first-order difference scheme of this method is
and the second-order difference scheme is
Writing (36) and (37) in Eq. (1), we get
Now, we shall show convergence and stability for the two methods.
3.1 The convergence of the methods
The error vector at level \(t=t_{k+1}\) is denoted by \(e^{k+1}=\overline{u}^{k+1}-u^{k+1}\), \(e^{0}=0\), where \(\overline{u}^{k}=(\overline{u}_{n-1}^{k},\overline{u}_{n-2}^{k},\ldots,\overline{u}_{1}^{k})^{T}\)is the exact solution of the problem (6).
First, we shall show that the equation for IFDS shows convergence. Using Eq. (5), we can write Eq. (35) in the following form:
where \(u_{n}^{k}=u(t_{k},x_{n})\), \(u_{n}^{0}=\varphi (x_{n}),\frac{u_{n}^{1}-u_{n}^{0}}{\tau }=\psi (x_{n})\) for \(n=0,1,\ldots,N\). From Eq. (39), we obtain
where \(u^{k}=(u_{n-1}^{k},u_{n-2}^{k},\ldots,u_{1}^{k})^{T}\), \(F^{k}=(\tau ^{2}f(u_{n-1}^{k-1},x_{n-1},t_{k}),\ldots,\tau ^{2}f(u_{1}^{k-1},x_{1},t_{k}))^{T}\),
where \(a=(2-\frac{\tau ^{2-\alpha }}{\Gamma (2-\alpha )}w_{1}^{(\alpha )}-\tau ^{2}-2\frac{\tau ^{2}}{h^{2}})\) and \(b=\frac{\tau ^{2}}{h^{2}}\),
Theorem 3.1
The system (40a) is convergent and \(\vert u_{n}^{k}-\overline{u}_{n}^{k} \vert =O(O(\tau )+O(h))\) for any n, k where
Proof
From (40a), we have \(e^{k+1}=A^{k}e^{k}-e^{k-1}+F_{e}^{k}+(O(\tau )+O(h))\);
when \(\Delta F^{k}=\operatorname{diag}((\tau ^{2}L_{n-1}^{k},\ldots,\tau ^{2}L_{1}^{k})^{T})\). Note that \(\vert L_{n}^{k} \vert \leq L\), for any \(k,n\).
For given h, we choose τ to satisfy the condition
From Eq. (41), we obtain \(\frac{2\tau ^{2}\Gamma (2-\alpha )}{2\Gamma (2-\alpha )-\tau ^{2-\alpha }-\tau ^{2}\Gamma (2-\alpha )}\leq h^{2}\).
For any constant \(C>0\) independent of τ, h, we obtain
Taking \(r_{1}=2+\tau ^{2}L\) and \(r_{2}=C(h^{2}+\tau )\), then
In a similar manner, using the method in [35], we obtain
From the second initial condition we have \(\Vert e^{1} \Vert _{n}\leq \Vert e^{0} \Vert _{n}\). Thus, the proof of the theorem is completed. □
Second, we shall present the convergence of the DFFDS formula. From Eq. (38), we get
Using a similar procedure to above and the method of [35], the previous formula can be written
Theorem 3.2
The system (42) is convergent and \(\vert u_{n}^{k}-\overline{u}_{n}^{k} \vert =O(O(\tau )+O(h))\) for any n, k where
Proof
We can write Eq. (42) in the following form:
Using the method in [36], we can obtain
Taking into consideration the previous theorem and the previous inequalities, the proof of this theorem is straightforward. □
As a consequence of the above facts, we have the following theorem.
3.2 The stability of the methods
Theorem 3.3
-
(i)
Equation (35) is unconditionally stable.
-
(ii)
If \(\frac{\tau ^{2-\alpha }}{\Gamma (2-\alpha )}<1\), then Eq. (38) is unconditionally stable.
Proof
To prove this theorem, we shall consider the Fourier method of analyzing stability and the von Neumann criterion in the method [37]; a small error is given as follows:
with
where λ is a complex and β is a real number. Due to the von Neumann criterion for stability, the condition \(|\lambda |\leq 1\) has to be satisfied.
First, we shall present stability analysis for Eq. (35). From (43) and (44), the stability of IFDS (35) is
where
The condition \(|\lambda |\leq 1\) is guaranteed if
is satisfied. Considering (46) in the left-hand side of (47), the following form is obtained:
which is true if
Considering (46) in the right-hand of (47), the following form is also obtained:
which is true if
From Eqs. (49) and (51), \(\tau \leq 1\) is obtained. Thus, the scheme (35) is stable.
Second, we shall present stability analysis for Eq. (38). Using Eqs. (43) and (44), we get the following stability equation:
where
Assume that \(\cos \beta h>0\), \(1-\frac{\tau ^{2-\alpha }}{\Gamma (2-\alpha )}>0\), if \(\ \overline{A}>0\), \(\overline{C}>0\) and \(\overline{A}>\overline{C}\), then \(\overline{B}^{2}-\overline{A}\overline{C}\leq 0\) always holds. Hence the solutions
of (52) satisfy \(\vert \lambda _{1,2} \vert \leq 1\), which implies that the scheme (38) is stable. □
Applications of this theorem are shown in the following numerical examples.
4 Numerical implementation
In this section, we shall present two examples which are applications of Theorem 3.3.
Example 1
Consider the following fractional telegraph partial differential equation for nonlocal boundary value problems:
Example 2
Consider the following fractional telegraph partial differential equation for a nonlocal boundary value problem:
Using the Laplace transform method, we see that the exact solution of the problem (53) is \(u(t,x)=(t^{3}-t+1)\sin x\) and Eq. (54) is obtained: \(u(t,x)=(t^{3}+1)(x^{2}-3x+2)\). To solve problem (53) we applied two difference schemes method given by Eqs. (35) and (38). We use a procedure of modified Gauss elimination method for the difference equations (53) and (54). Then we calculate the maximum norm of error of the numerical solution as
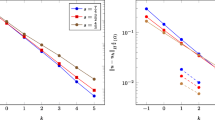
where \(u_{n}^{k}=u(t_{k},x_{n})\) is the approximate solution and \(u(t,x)\) is the exact solution. Table 1 shows the error analysis for the IFDS method and Table 2 presents the error analysis for the DFFDS method.
Remark 4.1
We note that in example (53), when we use IFDS, we see that the maxerror values are \(0.0028(\mbox{CPU}:2.171760)\), \(0.0025(\mbox{CPU}:0.801173)\), \(0.0018(\mbox{CPU}:0.79339)\) for \(\alpha =0.5\), 0.1, 0.9, respectively, at \(N=200 \) and \(M=100\). Furthermore, in example (54) when we use DFFDS, we see that the maxerror values are \(2.4246\times 10^{-4}(\mbox{CPU}:0.759911)\), \(3.1245\times 10^{-4}(\mbox{CPU}:0.714135)\), \(3.2523\times 10^{-4}(\mbox{CPU}:0.707563)\) for \(\alpha =0.5\), 0.1, 0.9, respectively, at \(N=200\) and \(M=100\). From these computations and Table 1 and Table 2, one finds more effective results for \(\tau =h^{2}\).
5 Conclusion
In this paper, the solution of the fractional differential equation (6) is obtained. The stability estimates are shown for the abstract form of this differential equation. The first-order implicit and Dufort–Frankel difference schemes for Eq. (1) are constructed. Stability inequalities are proved for given difference schemes methods. With the help of the difference scheme method with the Caputo fractional definition, we construct and obtain the accuracy algorithms for solving partial differential equations. Approximate solutions for numerical experiments are investigated by these methods. These results are compared with the exact solutions. MATLAB is used for all numerical calculations. Two different error analysis tables are obtained and compared. It was seen that the IFDS method is more effective than the DFFDS method in these numerical result tables.
References
Çelik, C., Duman, M.: Crank–Nicolson method for the fractional diffusion equation with the Riesz fractional derivative. J. Comput. Phys. 231(4), 1743–1750 (2012)
Goria, I.: Numerical methods for fractional reaction-dispersion equation with Riesz space fractional derivative. Eng. Tech. J. 29(4) (2011)
Jafari, H., Daftardar-Gejji, V.: Solving linear and nonlinear fractional diffusion and wave equations by Adomian decomposition. Appl. Math. Comput. 180(2), 488–497 (2006)
Ahmed, E., El-Sayed, A., El-Saka, H.A.: Equilibrium points, stability and numerical solutions of fractional-order predator–prey and rabies models. J. Math. Anal. Appl. 325(1), 542–553 (2007)
Karatay, İ., Bayramoğlu, Ş.R., Şahin, A.: Implicit difference approximation for the time fractional heat equation with the nonlocal condition. Appl. Numer. Math. 61(12), 1281–1288 (2011)
Su, L., Wang, W., Yang, Z.: Finite difference approximations for the fractional advection–diffusion equation. Phys. Lett. A 373(48), 4405–4408 (2009)
Tadjeran, C., Meerschaert, M.M., Scheffler, H.-P.: A second-order accurate numerical approximation for the fractional diffusion equation. J. Comput. Phys. 213(1), 205–213 (2006)
Karatay, I., Kale, N., Erguner, S.R.B., et al.: Stability and convergence of a finite difference scheme for fractional partial differential equations by matrix method. In: International Mathematical Forum, vol. 9, pp. 1757–1765 (2014)
Kaya, D., Gülbahar, S., Yokuş, A., Gülbahar, M.: Solutions of the fractional combined kdv–mkdv equation with collocation method using radial basis function and their geometrical obstructions. Adv. Differ. Equ. 2018(1), 77 (2018)
Nazari, D., Shahmorad, S.: Application of the fractional differential transform method to fractional-order integro-differential equations with nonlocal boundary conditions. J. Comput. Appl. Math. 234(3), 883–891 (2010)
Zheng, B.: Exp-function method for solving fractional partial differential equations. Sci. World J. 2013 (2013)
Wu, G.-c., Lee, E.: Fractional variational iteration method and its application. Phys. Lett. A 374(25), 2506–2509 (2010)
Abdulaziz, O., Hashim, I., Momani, S.: Application of homotopy-perturbation method to fractional ivps. J. Comput. Appl. Math. 216(2), 574–584 (2008)
Zhang, S., Zhang, H.-Q.: Fractional sub-equation method and its applications to nonlinear fractional pdes. Phys. Lett. A 375(7), 1069–1073 (2011)
Ghosh, U., Sengupta, S., Sarkar, S., Das, S.: Analytic solution of linear fractional differential equation with Jumarie derivative in term of Mittag–Leffler function (2015). arXiv:1505.06514
Podlubny, I.: Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications, vol. 198. Elsevier, Amsterdam (1998)
Jumarie, G.: Modified Riemann–Liouville derivative and fractional Taylor series of nondifferentiable functions further results. Comput. Math. Appl. 51(9–10), 1367–1376 (2006)
Ghosh, U., Sengupta, S., Sarkar, S., Das, S.: Characterization of non-differentiable points in a function by fractional derivative of jumarrie type (2015). arXiv:1505.06248
Ashyralyev, A., Dal, F.: Finite difference and iteration methods for fractional hyperbolic partial differential equations with the Neumann condition. Discrete Dyn. Nat. Soc. 2012 (2012)
Aslefallah, M., Rostamy, D., Hosseinkhani, K.: Solving time-fractional differential diffusion equation by theta-method. Int. J. Adv. Appl. Math. Mech. 2(1), 1–8 (2014)
Benchohra, M., Hamani, S., Ntouyas, S.: Boundary value problems for differential equations with fractional order and nonlocal conditions. Nonlinear Anal., Theory Methods Appl. 71(7–8), 2391–2396 (2009)
Ashyralyev, A., Modanli, M.: Nonlocal Boundary Value Problem for Telegraph Equations. AIP Conference Proceedings, vol. 1676, p. 020078. AIP, New York (2015)
Yuan, Q., Chen, H.: An expanded mixed finite element simulation for two-sided time-dependent fractional diffusion problem. Adv. Differ. Equ. 2018(1), 34 (2018)
Dehghan, M., Manafian, J., Saadatmandi, A.: Solving nonlinear fractional partial differential equations using the homotopy analysis method. Numer. Methods Partial Differ. Equ. 26(2), 448–479 (2010)
Dehghan, M., Yousefi, S., Lotfi, A.: The use of He’s variational iteration method for solving the telegraph and fractional telegraph equations. Int. J. Numer. Methods Biomed. Eng. 27(2), 219–231 (2011)
Dehghan, M.: Efficient techniques for the second-order parabolic equation subject to nonlocal specifications. Appl. Numer. Math. 52(1), 39–62 (2005)
Saadatmandi, A., Dehghan, M.: A new operational matrix for solving fractional-order differential equations. Comput. Math. Appl. 59(3), 1326–1336 (2010)
Dehghan, M., Safarpoor, M.: The dual reciprocity boundary integral equation technique to solve a class of the linear and nonlinear fractional partial differential equations. Math. Methods Appl. Sci. 39(10), 2461–2476 (2016)
Nishimoto, K.: An Essence of Nishimoto’s Fractional Calculus (Calculus in the 21st Century): Integrations and Differentiations of Arbitrary Order. Descartes Press Company (1991)
Karatay, I., Kale, N., Bayramoglu, S.: A new difference scheme for time fractional heat equations based on the Crank–Nicholson method. Fract. Calc. Appl. Anal. 16(4), 892–910 (2013)
Samko, S.G., Kilbas, A.A., Marichev, O.I., et al.: Fractional Integrals and Derivatives. Theory and Applications p. 44. Gordon and Breach, Yverdon (1993)
Ashyralyev, A., Modanli, M.: An operator method for telegraph partial differential and difference equations. Bound. Value Probl. 2015(1), 41 (2015)
Ashyralyev, A., Sobolevskii, P.: A note on the difference schemes for hyperbolic equations. Abstr. Appl. Anal. 6, 63–70 (2001)
Cannon, J.R., Yanping, L., Shingmin, W.: An implicit finite difference scheme for the diffusion equation subject to mass specification. Int. J. Eng. Sci. 28(7), 573–578 (1990)
Sweilam, N., Assiri, T.: Non-standard finite difference schemes for solving fractional order hyperbolic partial differential equations with Riesz fractional derivative. J. Fract. Calc. Appl. 7(1), 46–60 (2016)
Modanli, M., Akgül, A.: Numerical solution of fractional telegraph differential equations by theta-method. Eur. Phys. J. Spec. Top. 226(16–18), 3693–3703 (2017)
Liang, Z., Yan, Y., Cai, G.: A Dufort–Frankel difference scheme for two-dimensional sine-Gordon equation. Discrete Dyn. Nat. Soc. 2014, Article ID 784387 (2014)
Acknowledgements
The authors are thankful to the referees for their valuable comments and constructive suggestions towards the improvement of the paper.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Modanlı, M. Two numerical methods for fractional partial differential equation with nonlocal boundary value problem. Adv Differ Equ 2018, 333 (2018). https://doi.org/10.1186/s13662-018-1789-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1789-2