
Abstract
In this paper, the \(H_{\infty} \) performance analysis and switching control of uncertain discrete switched systems with time delay and linear fractional perturbations are considered via a switching signal design. Lyapunov-Krasovskii type functional and discrete Wirtinger inequality are used in our approach to improve the conservativeness of the past research results. Less LMI variables and shorter program running time are provided than our past proposed results. Finally, two numerical examples are given to show the improvement of the developed results.
Similar content being viewed by others


1 Introduction
In recent years, the dynamical systems have often been characterized by both continuous and discrete dynamics. Such systems are usually confronted in many engineering practical processes and are referred to as hybrid systems [1–7]. Hybrid systems may have the property that several discrete states are possible for some \(x(t)\) [5]. A switched system may be obtained from hybrid systems with only one discrete state for some \(x(t)\) [1, 4, 5]. This discrete state is called the switching signal. Hence the system dynamics of switched systems are comprised of a family of continuous or discrete subsystems and a signal handling the switching among the subsystems. This class of systems is usually called switched systems. Switched linear systems provide a framework that bridges the linear control systems and the complex or uncertain feedback systems [4]. Switching among systems may produce many complicated nonlinear system behaviors, such as multiple limit cycles and chaos [4, 8]. Switched systems include automated highway systems, automotive engine control systems, chemical process, constrained robotics, mutli-rate control, power systems and power electronics, robot manufacture, water quality control, and stepper motors [4, 8–10]. It is also well known that the existence of delay in a system may cause instability or bad performance in closed loop control systems [11–13]. The phenomena of time delay are usually confronted in many engineering systems, such as chemical engineering systems, hydraulic systems, inferred grinding model, neural network, nuclear reactor, and rolling mill. Hence stability and control for continuous and discrete switched systems with time delay have been investigated in recent years [1, 4, 8, 14–23].
The first interesting fact in a switched system is that the stability of overall system under arbitrary switching cannot be guaranteed with all stable subsystems [4, 8, 16, 21–23]. Another fact is that the stability of a switched system can be achieved by choosing an appropriate switching signal even when each subsystem is unstable [4, 8, 14–27]. Hence the issue of a suitable switching signal design is important and interesting for the stability and performance of switching systems. In [23], the switching signal is identified to guarantee the stability of a discrete switched time-delay system. In [17–20], some switching signal design techniques are proposed to guarantee the stability and performance of discrete switched systems with time delay. Hence it is interesting to develop a simple design scheme for switching signal which is suitable for continuous-time and discrete-time switched systems. In this paper, the design scheme for switching signal is more flexible than that in some recently published reports [17–20].
In recent years, the \(H_{\infty} \) performance criterion has been usually used to achieve this minimization for regulated output under various disturbance inputs. In [17, 21], \(H_{\infty} \) controls are investigated for discrete switched systems with perturbations under arbitrary switching signal. \(H_{\infty} \) controls were proposed to identify the switching signal via dwell time approach in [28]. In order to achieve better \(H_{\infty} \) performance of switched systems, designs for switching signal and control will be a good choice [19]. In our past results in [19], the developed switching signal design would depend on the parameters of a system. The used nonnegative inequality approach in our past results in [16–19, 24] is efficient, but this approach has more LMI variables and longer program running time. In this paper, less LMI variables and shorter program running time will be achieved. In the past, Wirtinger inequality approach was developed to improve the conservativeness of the proposed results in [29]. It is interesting to note that Wirtinger-based inequality approach is also less conservative than Jensen inequality one [30]. In this paper, Wirtinger-based inequality combined with some free-weighting variables is used to estimate the allowable bounds of time delay and minimize the \(H_{\infty} \) performance.
On the other hand, some perturbations of switched systems are also included in this paper. A more general perturbed form than parameter perturbations in [16, 21, 22] is considered as linear fractional perturbations in [17–19, 31]. Hence a simple method to design the switching signal in \(H_{\infty} \) performance and switching control is proposed for discrete switched systems with time delay and linear fractional perturbations. Some numerical examples are shown to demonstrate the use of proposed results. From the simulations, our proposed approach illustrates those less conservative results.
Notations
For a matrix A, we denote the transpose by \(A^{T}\), symmetric positive (negative) definite by \(A > 0\) (\(A < 0\)). \(A \le B\) (\(A < B\)) means that matrix \(B - A\) is symmetric positive semi-definite (definite). I denotes the identity matrix. Define \(\bar{N} = \{ 1, 2, \ldots,N \}\), \(A\backslash B = \{ x| x \in A\mbox{ and }x \notin B \}\), \(L_{2} ( 0,\infty ) = \{ w ( k ) |\sum_{k = 0}^{\infty} w^{T} ( k )w ( k ) < \infty \}\).
2 Problem formulation and the main results
Consider the following uncertain discrete switched time-delay system:
where \(x ( k ) \in \Re^{n}\), \(x_{k}\) is the state defined by \(x_{k}(\theta ): = x(k + \theta )\), \(\forall \theta \in \{ - \tau, - \tau + 1, \ldots, 0 \}\), \(w(k) \in \Re^{m}\) is the disturbance input, \(z ( k ) \in \Re^{q}\) is the regulated ouput, σ is a switching signal in the finite set \(\{ 1, 2, \ldots,N \}\) and will be designed to preserve the performance of the system, \(\varphi ( k ) \in \Re^{n}\) is an initial state function, delay τ is a given positive integer. Matrices \(A_{i}\), \(A_{\tau i}\), \(D_{i}\), \(A_{zi}\), \(A_{z\tau i}\), \(D_{zi}\), \(i = 1, 2, \ldots,N\), are constant with appropriate dimensions. \(\Delta A_{i} ( k )\), \(\Delta A_{\tau i} ( k )\), \(\Delta D_{i} ( k )\), \(\Delta A_{zi} ( k )\), \(\Delta A_{z\tau i} ( k )\), and \(\Delta D_{zi} ( k )\) are some perturbed matrices satisfying the following conditions:
where \(M_{i}\), \(M_{zi}\), \(N_{Ai}\), \(N_{A\tau i}\), \(N_{Di}\), \(N_{zAi}\), \(N_{zA\tau i}\), and \(N_{zDi}\), \(i = 1, 2, \ldots,N\), \(\Xi_{i}\) and \(\Xi_{zi}\) are some given constant matrices of appropriate dimensions. \(\Gamma_{i} ( k )\) and \(\Gamma_{zi} ( k )\) are some matrices representing the perturbations which satisfy
Define switching domains as
where matrices \(U_{i} = U_{i}^{T}\) will be selected from the proposed results in this paper and
From the above definition, the switching signal can be chosen by
where \(\bar{\Omega}_{i}\) is defined in (2b).
The following lemmas will be used to derive the main proposed results in this paper.
Lemma 1
([32])
If there exist some constants \(0 \le \alpha_{i} \le 1\), \(i \in \bar{N}\), \(\sum_{i = 1}^{N} \alpha_{i} = 1\), some matrices \(U_{i} = U_{i}^{T}\), \(i \in \bar{N}\), such that
we have
where Φ is an empty set of \(\Re^{n}\) and \(\bar{\Omega}_{i}\) is defined in (2a)-(2c).
Lemma 2
([33], Schur complement)
For a matrix \(S = \bigl[ {\scriptsize\begin{matrix}{} S_{11} & S_{12} \cr * & S_{22} \end{matrix}} \bigr]\) with \(S_{11} = S_{11}^{T}\), \(S_{22} = S_{22}^{T}\), the following conditions are equivalent:
-
(1)
\(S < 0\);
-
(2)
\(S_{22} < 0\), \(S_{11} - S_{12}S_{22}^{ - 1}S_{12}^{T} < 0\).
Lemma 3
([31])
Suppose that the matrix \(\Delta_{i} ( k )\) is defined in (1f) and satisfies (1h), then the following statements are equivalent for real matrices \(U_{i}\), \(W_{i}\), and \(X_{i}\) with \(X_{i} = X_{i}^{T}\):
-
(I)
The inequality is satisfied
$$X_{i} + U_{i}\Delta_{i} ( k )W_{i} + W_{i}^{T}\Delta_{i}^{T} ( k )U_{i}^{T} < 0; $$ -
(II)
There exists a scalar \(\varepsilon_{i} > 0\) such that
$$\left [ \begin{matrix} X_{i} & U_{i} & \varepsilon_{i} \cdot W_{i}^{T} \\ * & - \varepsilon_{i} \cdot I & \varepsilon_{i} \cdot \Xi_{i}^{T} \\ * & * & - \varepsilon_{i} \cdot I \end{matrix} \right ] < 0, $$where the matrix \(\Xi_{i}\) is defined in (1f).
Lemma 4
([29], Discrete Wirtinger inequality)
For a matrix \(R > 0\), a positive integer τ, and a vector function \(x ( k ) \in \Re^{n}\), the following inequality is satisfied:
where \(y ( i ) = x ( i + 1 ) - x ( i )\), \(\eta ( k ) = x ( k ) + x ( k - \tau ) - \varepsilon ( \tau ) \cdot \sum_{i = k - \tau + 1}^{k - 1} x ( i )\),
Proof
For any positive integer \(\tau > 1\), this proof is provided by [29]. For \(\tau = 1\), it is a trivial result. □
Definition 1
([18])
Consider system (1a)-(1h) with the switching signal in (2c). Assume the following:
-
(i)
With \(w ( k ) = 0\), system (1a)-(1h) is asymptotically stable by the switching signal in (2c).
-
(ii)
With zero initial conditions (i.e., \(\varphi ( k ) = 0\), \(- r_{M} \le k \le 0\)), the signals \(w ( k )\) and \(z ( k )\) satisfy
$$\sum_{k = 0}^{\ell} z^{T} ( k )z ( k ) \le \gamma^{2} \cdot \sum_{k = 0}^{\ell} w^{T} ( k )w ( k ),\quad \forall w \ne 0, $$for all integers \(\ell > 0\) and constant \(\gamma > 0\). Then we say that system (1a)-(1h) is asymptotically stablizable with \(H_{\infty} \) performance γ by switching signal in (2c). If the parameter ℓ is selected as ∞, the disturbance input w should be constrained in \(L_{2} ( 0,\infty )\).
A delay-dependent condition is now provided to guarantee the \(H_{\infty} \) performance of the considered switched system by the design of switching signal.
Theorem 1
Suppose that there exist some constants \(0 \le \alpha_{i} \le 1\), \(i \in \bar{N}\), and \(\sum_{i = 1}^{N} \alpha_{i} = 1\), the following LMI optimization problem:
subject to
where \(\Sigma_{j}\), \(\Pi_{j}\), \(\Gamma_{j}\) are defined by
has a feasible solution with a \(2n \times 2n\) matrix \(P > 0\), some \(n \times n\) matrices \(Q_{1} > 0\), \(Q_{2} > 0\), \(R > 0\), \(S > 0\), \(U_{j} = U_{j}^{T}\), \(W = W^{\mathrm{T}}\), and constants \(\bar{\gamma} > 0\), \(\varepsilon_{j} > 0\), \(j = 1, 2, \ldots,N\). Then system (1a)-(1h) is asymptotically stablizable with \(H_{\infty} \) performance \(\gamma = \sqrt{\bar{\gamma}} \) by switching signal in (2c).
Proof
Define the following Lyapunov-Krasovskii type functional:
where \(P > 0\), \(\hat{Q} = \operatorname{diag} [ Q_{1} \ Q_{2} ] > 0\), \(R > 0\), \(S > 0\), \(y ( i ) = x ( i + 1 ) - x ( i )\), \(\varsigma ( k ) = [4] [ x ( k )^{T} \ \sum_{i = k - \tau}^{k - 1} x ( i )^{T} ]^{T}\), and \(z ( i ) = [ x ( i )^{T} \ y ( i )^{T} ]^{T}\). The difference of the functional in (4) along the solutions of system (1a)-(1h) has the form
By the definitions \(y ( i ) = x ( i + 1 ) - x ( i )\) and \(z ( i ) = [ x ( i )^{T} \ y ( i )^{T} ]^{T}\), we have
From the previous derivations, we can obtain the following result:
with
and from (1a)-(1h) and Lemma 4, we have
where \(\eta ( k ) = x ( k ) + x ( k - \tau ) - \varepsilon ( \tau ) \cdot \sum_{i = k - \tau + 1}^{k - 1} x ( i )\). Assume \(\sigma ( x ( k ) ) = j \in \bar{N}\) and from (3a)-(3b), (3d), and (8a)-(8g), the following result can be derived:
where
Define
where
By condition (3b) with Lemma 1 and switching signal in (2c), the following results can be guaranteed from (9a):
By Lemmas 2 and 3 with (9d), the condition \(\Lambda_{j} < 0\) in (3b) will imply \(\bar{\Sigma}_{j} < 0\) in (9c). \(\bar{\Sigma}_{j} < 0\) in (9c) will also imply \(\hat{\Sigma}_{j} < 0\) in (9a)-(9b) and (10). Since \(\hat{\Sigma}_{j} < 0\) in (10), we can guarantee that system (1a)-(1h) with the switching signal in (2c) and \(w ( k ) = 0\) is asymptotically stable. Summing equation (10) from 0 to ℓ, we have
With zero initial condition (\(\varphi ( k ) = 0, - \tau \le k \le 0\)), we have
By the definition of \(V ( x_{k} )\) in (4), we have
From the previous derivations, the following condition can be guaranteed:
By Definition 1, system (1a)-(1h) is asymptotically stabilizable with \(H_{\infty} \) performance γ by switching signal in (2c). This completes the proof. □
3 Robust \(H_{\infty} \) switching control for switched time-delay system
In this section, we will consider the following uncertain discrete switched time-delay system with control input:
where \(x ( k ) \in \Re^{n}\), \(x_{k}\) is the state defined by \(x_{k}(\theta ): = x(k + \theta )\), \(\forall \theta \in \{ - \tau, - \tau + 1, \ldots, 0 \}\), \(w(k) \in \Re^{m}\) is the disturbance input, \(u(k) \in \Re^{\upsilon} \) is the control input, \(z ( k ) \in \Re^{q}\) is the regulated ouput, σ is a switching signal in the finite set \(\{ 1, 2, \ldots,N \}\) and will be designed to achieve the performance requirement of the system. \(\varphi ( k ) \in \Re^{n}\) is an initial state function, delay τ is a given positive integer. Matrices \(A_{i}\), \(A_{\tau i}\), \(D_{wi}\), \(D_{ui}\), \(A_{zi}\), \(A_{z\tau i}\), \(D_{zwi}\), \(i = 1, 2, \ldots,N\), are constant of appropriate dimensions. \(\Delta A_{i} ( k )\), \(\Delta A_{\tau i} ( k )\), \(\Delta D_{wi} ( k )\), \(\Delta D_{ui} ( k )\), \(\Delta A_{zi} ( k )\), \(\Delta A_{z\tau i} ( k )\), and \(\Delta D_{zwi} ( k )\) are some matrices satisfying the following conditions:
where \(M_{i}\), \(M_{zi}\), \(N_{Ai}\), \(N_{A\tau i}\), \(N_{Dwi}\), \(N_{Dui}\), \(N_{zAi}\), \(N_{zA\tau i}\), and \(N_{zwi}\), \(i = 1, 2, \ldots,N\), \(\Xi_{i}\), and \(\Xi_{zi}\) are some given constant matrices of appropriate dimensions. \(\Gamma_{i} ( k )\) and \(\Gamma_{zi} ( k )\) are some matrices representing the perturbations which satisfy
Define the switching domains as
where matrices \(U_{i} = U_{i}^{T}\) will be selected from our proposed results in this paper and
From the above domain definition, the switching signal can be designed by
where \(\bar{\Omega}_{i}\) is defined in (12b). The following state feedback switching control is used to achieve the stabilization and \(H_{\infty} \) performance for the switched system in (11a)-(11h):
where the state feedback gains \(K_{i}, K_{\tau i} \in \Re^{\upsilon \times n}\) will be designed from our proposed result.
Lemma 5
([34])
For some matrices X, Y, and Z with \(X = X^{T}\) and \(Z = Z^{T}\), the following conditions are equivalent:
-
(a)
The inequality is satisfied
$$S = \left [ \begin{matrix} X & Y \\ * & - Z^{ - 1} \end{matrix} \right ] < 0. $$ -
(b)
There exists a scalar \(\eta > 0\) such that
$$\left [ \begin{matrix} X & \eta \cdot Y & 0 \\ * & - 2\eta \cdot I & Z \\ * & * & - Z \end{matrix} \right ] < 0. $$
Lemma 6
([35])
Suppose that \(\Delta_{i} ( k )\) is defined in (11f) and satisfies (11h), then for real matrices \(V_{i}\), \(W_{i}\), and \(X_{i}\) with \(X_{i} = X_{i}^{T}\), the following statements are equivalent:
-
(a)
The inequality is satisfied
$$X_{i} + V_{i}\Delta_{i} ( k )W_{i} + W_{i}^{T}\Delta_{i}^{T} ( k )V_{i}^{T} < 0. $$ -
(b)
There exists a scalar \(\varepsilon_{i} > 0\) such that
$$\left [ \begin{matrix} X_{i} & \varepsilon_{i} \cdot V_{i} & W_{i}^{T} \\ * & - \varepsilon_{i} \cdot I & \varepsilon_{i} \cdot \Xi_{i}^{T} \\ * & * & - \varepsilon_{i} \cdot I \end{matrix} \right ] < 0, $$where the matrix \(\Xi_{i}\) is defined in (11f).
Definition 2
([19])
Consider the switched system (11a)-(11h) with switching signal in (12c) and switching control in (13). Assume
-
(i)
With \(w ( k ) = 0\), system (11a)-(11h) with switching signal in (12c) and switching control in (13) is asymptotically stable.
-
(ii)
With zero initial conditions (i.e., \(\varphi ( k ) = 0\), \(- r_{M} \le k \le 0\)), the signals \(w ( k )\) and \(z ( k )\) satisfy
$$\sum_{k = 0}^{\ell} z^{T} ( k )z ( k ) \le \gamma^{2} \cdot \sum_{k = 0}^{\ell} w^{T} ( k )w ( k ),\quad \forall w \ne 0, $$for all integers \(\ell > 0\) and constant \(\gamma > 0\).
Then we say that system (1a)-(1h) is asymptotically stablizable with \(H_{\infty} \) performance γ by switching signal in (12c) and switching control in (13). If the parameter ℓ is selected as ∞ in (ii), the disturbance input w should be constrained in \(L_{2} ( 0,\infty )\).
Theorem 2
Suppose that there exist some constants \(0 \le \alpha_{i} \le 1\), \(i \in \underline{N}\), and \(\sum_{i = 1}^{N} \alpha_{i} = 1\), the following LMI optimization problem:
subject to
where
has a feasible solution with some \(n \times n\) matrices \(P_{11} > 0\), \(P_{22} > 0\), \(Q_{1} > 0\), \(Q_{2} > 0\), \(R > 0\), \(S > 0\), \(U_{j} = U_{j}^{T}\), \(W = W^{\mathrm{T}}\), matrices \(\hat{K}_{j} \in \Re^{\upsilon \times n}\), \(\hat{K}_{\tau j} \in \Re^{\upsilon \times n}\), \(j = 1, 2, \ldots,N\), and constants \(\bar{\gamma} > 0\), \(\varepsilon_{j} > 0\), \(\eta_{j} > 0\), \(j = 1, 2, \ldots,N\). Then system (11a)-(11h) is asymptotically stablizable with \(H_{\infty} \) performance \(\gamma = \sqrt{\bar{\gamma}} \) by the designed switching signal in (12c) and switching control in (13) with control gains \(K_{i} = \hat{K}_{i} / \eta_{i}\) and \(K_{\tau i} = \hat{K}_{\tau i} / \eta_{i}\).
Proof
With \(P = \bigl[ {\scriptsize\begin{matrix}{} P_{11} & 0 \cr 0 & P_{22} \end{matrix}} \bigr]\) in the Lyapunov-Krasovskii type functional of (4), the following results can be provided in the derivations of (4)-(7):
where \(X ( k )\) is defined in (6a)-(6b), and
Define
where \(\bar{\Sigma}_{1j}\) is defined in (15b),
Consider the following matrices with constants \(\eta_{j} > 0\), \(j = 1, 2, \ldots, N\):
where
From Lemmas 2, 5, and 6, the conditions in (14b)-(14c) should be imposed to achieve the asymptotic stablization with \(H_{\infty} \) performance of the considered system in Definition 2. This completes the proof. □
Remark 1
The matrix uncertainties in (1d)–(1h) are often called linear fractional perturbations [17–19, 31]. The parametric perurbations in [16, 21, 22] are the special conditions of the considered perturbations with \(\Xi_{i} = 0\), \(\Xi_{zi} = 0\), \(i \in \bar{N}\).
Remark 2
In recent years, there have been some schemes proposed to define the switching domains as listed in the following:
-
(a)
In [20], the switching domains are selected as:
$$\Omega_{i} ( P,U,A_{i} ) = \bigl\{ x \in \Re^{n}:x^{T} \bigl[ ( r_{M} - r_{m} ) \cdot U - A_{i}^{T}P - PA_{i} \bigr]x < 0 \bigr\} , \quad i = 1, 2, \ldots,N, $$where matrices \(P > 0\), \(U > 0\), \(\bar{\Omega}_{1} = \Omega_{1}\), \(\bar{\Omega}_{2} = \Omega_{2}\backslash \bar{\Omega}_{1}\), … , and \(\bar{\Omega}_{N} = \Omega_{N}\backslash ( \bigcup_{i = 1}^{N - 1} \bar{\Omega}_{i} )\).
-
(b)
In [18], the switching domains are selected as:
$$\Omega_{i} ( P,U,A_{i} ) = \bigl\{ x \in \Re^{n}:x^{T} \bigl( A_{i}^{T}PA_{i} \bigr)x \le x^{T}Ux \bigr\} ,\quad i = 1, 2, \ldots,N, $$where matrices \(P > 0\), \(U > 0\), \(\bar{\Omega}_{1} = \Omega_{1}\), \(\bar{\Omega}_{2} = \Omega_{2}\backslash \bar{\Omega}_{1}\), … , \(\bar{\Omega}_{N} = \Omega_{N}\backslash \bar{\Omega}_{1}\backslash \cdots \backslash \bar{\Omega}_{N - 1}\).
-
(c)
In [19], the switching domains are selected as:
$$\Omega_{i} ( P,U,A_{i} ) = \bigl\{ x \in \Re^{n}:x^{T} \bigl( A_{i}^{T}PA_{i} \bigr)x \le x^{T}U_{i}x \bigr\} ,\quad i = 1, 2, \ldots,N, $$where matrices \(P > 0\), \(U_{i} > 0\), \(i = 1, 2, \ldots,N\), and \(\bar{\Omega}_{i}\) is defined in (b).
In this paper, the switching domains are defined in (2a)-(2b) and (12a)-(12b) with
$$\Omega_{i} ( U_{i} ) = \bigl\{ x \in \Re^{n}:x^{T}U_{i}x \ge 0 \bigr\} , $$where matrices \(U_{i} = U_{i}^{T}\), \(i = 1, 2, \ldots,N\). The proposed approach in this paper is simple and more flexible. This approach can be applied to continuous switched systems to design the switching signal in our future research.
Remark 3
For a given constant γ, the \(H_{\infty} \) performance results in Theorems 1 and 2 can be guaranteed by setting \(\bar{\gamma} = \gamma^{2}\) in LMI conditions in (3a)-(3d) and (14a)-(14d), respectively.
4 Illustrative examples
Example 1
Consider system (1a)-(1h) with the following parameters:
With \(\tau = 12\) and \(\alpha_{1} = \alpha_{2} = 0.5\), the optimization problem in Theorem 1 is feasible with (some solutions for LMI variables are not shown here)
System (1a)-(1h) with (17) is asymptotically stabilizable with \(H_{\infty} \) performance \(\gamma = \sqrt{\bar{\gamma}} = \ 0.2512\) by the switching signal given by
where \(\bar{\Omega}_{1} = \{ [ x_{1} \ x_{2} ]^{T} \in \Re^{2}: - 0.0327x_{1}^{2} + 0.000594x_{1}x_{2} + 0.07687x_{2}^{2} \ge 0 \}\).
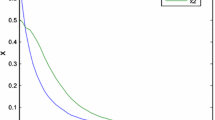
Under the disturbance inputs \(w ( k ) = [ 10 \times ( - 0.8 )^{k} \ - 10 \times ( 0.85 )^{k} ]^{T}\) shown in Figure 1 and zero initial conditions, the regulated outputs \(z ( k ) \in \Re^{2}\) of switched system (1a)-(1h) with (17)-(18) and without perturbations are shown in Figure 2. Under zero disturbance, the initial state function \(\varphi ( \theta ) = [ - 10 \ 10 ]^{T}\), \(\theta = - 12,\ldots , - 2, - 1, 0\), and without perturbations, state trajectories \(x ( k ) \in \Re^{2}\) of switched system (1a)-(1h) with (17)-(18) are shown in Figure 3. Good disturbance attenuation effect is shown in these simulation figures.

Disturbance inputs of the system (solid line: \(\pmb{w_{1}(k)}\) , dashed line: \(\pmb{w_{2}(k)}\) ).

Regulated outputs of the system (solid line: \(\pmb{z_{1}(k)}\) , dashed line: \(\pmb{z_{2}(k)}\) ).

State trajectories for the system (solid line: \(\pmb{x_{1}(k)}\) , dashed line: \(\pmb{x_{2}(k)}\) ).
The delay upper bound and switching signal in (18) that guarantee the asymptotic stability and \(H_{\infty} \) performance for system (1a)-(1h) with (17) are provided in Table 1 for \(\alpha_{1} = \alpha_{2} = 0.5\). From these comparisons in Table 1, our proposed results may be less conservative than some published ones.
Example 2
Consider system (11a)-(11h) with the following parameters:
With \(\tau = 15\) and \(\alpha_{1} = \alpha_{2} = 0.5\), the optimization problem in Theorem 2 is feasible with (some solutions for LMI variables are not shown here)
System (11a)-(11h) with (19) is asymptotically stabilizable with \(H_{\infty} \) performance \(\gamma = \sqrt{\bar{\gamma}} = \ 0.2951\) by switching signal in (12c) and switching control in (13). In this example, the gains of switching control in (13) are given by
The switching signal in (12c) is given by
where
Some delay upper bounds for the design of switching control and switching signal that guarantee the stabilization and \(H_{\infty} \) performance for system (11a)-(11h) with (19)-(21) are provided in Table 2 for \(\alpha_{1} = \alpha_{2} = 0.5\). From these comparisons in Table 2, our result provides major improvement on some previous published literature.
5 Conclusions
In this paper, the design scheme of switching signal for \(H_{\infty} \) performance analysis and switching control has been investigated for uncertain discrete switched systems with time delay and linear fractional perturbations. The Lyapunov-Krasovskii type functional and Wirtinger inequality approach are used to improve the conservativeness of the proposed results. The obtained results are shown to be less conservative and more useful via numerical examples. The major improvements in this paper compared to [17–19] are summarized as follows:
-
1.
A Lyapunov-Krasovskii type functional in (4) is proposed to derive the main results.
-
2.
Discrete Wirtinger inequality approach is used instead of nonnegative inequality approach in [17–19]. Less LMI variables and shorter program running time are proposed in the approach of this paper.
-
3.
Simple design scheme in (2a)-(2c) and (12a)-(12c) for switching signal is more flexible than that in [17–19].
References
Branicky, M: Stability of switched and hybrid systems. In: Proc. 33rd Conf. Decis. Control, pp. 3498-3503 (1994)
Bychkov, AS, Merkur’ev, MG: Stability of continuous hybrid systems. Cybern. Syst. Anal. 43, 261-265 (2007)
Bychkov, A, Ivanov, E, Suprun, O: Modified Lyapunov’s conditions for hybrid automata stability. Int. J. Inf. Content Process. 2, 115-126 (2015)
Mahmoud, MS: Switched Time-Delay Systems. Springer, Boston (2010)
Pettersson, S, Lennartson, B: Stability and robustness for hybrid systems. In: Proc. 35th Conf. Decis. Control, pp. 1202-1207 (1996)
Vlasov, AM, Bychkov, AS: Stability of linear stochastic hybrid automata. In: 11th National Cong. Theoretical and Appl. Mech., Article ID 104 (2009)
Ye, H, Michel, A, Hou, L: Stability theory for hybrid dynamical systems. IEEE Trans. Autom. Control 43, 461-474 (1998)
Sun, Z, Ge, SS: Switched Linear Systems Control and Design. Springer, London (2005)
Sun, Z, Ge, SS: Stability Theory of Switched Dynamical Systems. Springer, London (2011)
Mahmoud, MS, Nounou, HN, Xia, Y: Robust dissipative control for Internet-based switched systems. J. Franklin Inst. 347, 154-172 (2010)
Gu, K, Kharitonov, VL, Chen, J: Stability of Time-Delay Systems. Birkhäuser, Boston (2003)
Hale, JK, Lunel, SMV: Introduction to Functional Differential Equations. Springer, New York (1993)
Kolmanovskii, VB, Myshkis, A: Introduction to the Theory and Applications of Functional Differential Equations. Kluwer Academic, Dordrecht (1999)
Du, D: \(H_{\infty} \) filter for discrete-time switched systems with time-varying delays. Nonlinear Anal. Hybrid Syst. 4, 782-790 (2010)
Hou, L, Zong, G, Wu, Y: Observer-based finite-time exponential \(l_{2}\)-\(l_{\infty} \) control for discrete-time switched delay systems with uncertainties. Trans. Inst. Meas. Control 35, 310-320 (2013)
Lien, CH, Yu, KW, Chung, YJ, Chang, HC, Chen, JD, Chung, LY: Exponential stability and robust \(H_{\infty} \) control for uncertain discrete switched systems with interval time-varying delay. IMA J. Math. Control Inf. 28, 121-141 (2011)
Lien, CH, Yu, KW, Chen, JD, Chung, LY: Sufficient conditions for global exponential stability of discrete switched time-delay systems with linear fractional perturbations via switching signal design. Adv. Differ. Equ. 2013, 39 (2013)
Lien, CH, Yu, KW, Chung, LY, Chen, JD: \(H_{\infty} \) performance for uncertain discrete switched systems with interval time-varying delay via switching signal design. Appl. Math. Model. 37, 2484-2494 (2013)
Lien, CH, Yu, KW, Wu, LC, Chen, JD, Chung, LY: Robust \(H_{\infty} \) switching control and switching signal design for uncertain discrete switched systems with interval time-varying delay. J. Franklin Inst. 351, 565-578 (2014)
Phat, VN, Ratchagit, K: Stability and stabilization of switched linear discrete-time systems with interval time-varying delay. Nonlinear Anal. Hybrid Syst. 5, 605-612 (2011)
Sun, YG, Wang, L, Xie, G: Delay-dependent robust stability and \(H_{\infty} \) control for uncertain discrete-time switched systems with mode-dependent time delays. Appl. Math. Comput. 187, 1228-1237 (2007)
Zhang, L, Shi, P, Basin, M: Robust stability and stabilisation of uncertain switched linear discrete time-delay systems. IET Control Theory Appl. 2, 606-614 (2008)
Zhang, WA, Yu, L: Stability analysis for discrete-time switched time-delay systems. Automatica 45, 2265-2271 (2009)
Lien, CH, Yu, KW, Chung, YJ, Chang, HC, Chung, LY, Chen, JD: Switching signal design for global exponential stability of uncertain switched nonlinear systems with time-varying delay. Nonlinear Anal. Hybrid Syst. 5, 10-19 (2011)
Pairote, S, Phat, VN: Exponential stability of switched linear systems with time-varying delay. Electron. J. Differ. Equ. 2007, 159 (2007)
Phat, VN, Botmart, T, Niamsup, P: Switching design for exponential stability of a class of nonlinear hybrid time-delay systems. Nonlinear Anal. Hybrid Syst. 3, 1-10 (2009)
Sun, XM, Wang, W, Liu, GP, Zhao, J: Stability analysis for linear switched systems with time-varying delay. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 38, 528-533 (2008)
Song, Y, Fan, J, Fei, M, Yang, T: Robust \(H_{\infty} \) control of discrete switched system with time delay. Appl. Math. Comput. 205, 159-169 (2008)
Zhang, XM, Han, QL: Abel lemma-based finite-sum inequality and its application to stability analysis for linear discrete time-delay systems. Automatica 57, 199-202 (2015)
Zhu, XL, Yang, GH: Jensen inequality approach to stability analysis of discrete time systems with time-varying delay. In: Proc. Amer. Control Conf, pp. 1644-1649 (2008)
Li, T, Guo, L, Sun, C: Robust stability for neural networks with time-varying delays and linear fractional uncertainties. Neurocomputing 71, 421-427 (2007)
Lien, CH, Yu, KW, Chen, JD, Chung, LY: Global exponential stability of switched systems with interval time-varying delays and multiple nonlinearities via simple switching signal design. IMA J. Math. Control Inf. 33, 1135-1155 (2016)
Boyd, SP, Ghaoui, E, Feron, E, Balakrishnan, V: Linear Matrix Inequalities in System and Control Theory. SIAM, Philadelphia (1994)
Ibrir, S: Static output feedback and guaranteed cost control of a class of discrete-time nonlinear systems with partial state measurements. Nonlinear Anal. 68, 1784-1792 (2008)
Yang, J, Luo, W, Li, G, Zhong, S: Reliable guaranteed cost control for uncertain fuzzy neutral systems. Nonlinear Anal. Hybrid Syst. 4, 644-658 (2010)
Acknowledgements
The research reported here was supported by the Ministry of Science and Technology of Taiwan, R.O.C. under grant no. MOST 104-2221-E-022-003.
Author information
Authors and Affiliations
Contributions
The authors declare that the study was realized in collaboration with the same responsibility. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Yu, KW., Lien, CH. & Chang, HC. \({H} _{ {\infty}} \) analysis and switching control for uncertain discrete switched time-delay systems by discrete Wirtinger inequality. Adv Differ Equ 2017, 349 (2017). https://doi.org/10.1186/s13662-017-1405-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-017-1405-x