
Abstract
In this paper, synchronization of a network with time-varying topology and delay is investigated. Firstly, proper controllers are designed for achieving synchronization by adopting impulsive control scheme. Based on the linear matrix inequality technique and the Lyapunov function method, a synchronization criterion is derived and analytically proved. Secondly, controllers are improved by introducing adaptive strategy, and an adaptive synchronization criterion is obtained correspondingly. The updating law of the impulsive gain and the method for estimating the impulsive instant are provided in terms of the adaptive synchronization criterion. Finally, numerical simulations are performed to demonstrate the effectiveness of the theoretical results.
Similar content being viewed by others
1 Introduction
As we know, many large-scale systems consisting of interactive individuals, such as food webs, communication networks, social networks, power grids, cellular networks, world wide web, metabolic systems, disease transmission networks and so on [1–3], which are modeled by complex dynamical networks, exist in the real world. In the studies of dynamical networks, the outer coupling matrices are usually assumed as constant matrices. However, in many real systems, the interactions among the individuals change with time, i.e., networks topology or coupling strength is time-varying. For having intimate knowledge of those systems’ characteristics, it is necessary to investigate time-varying networks [4–11]. In [7], a time-varying dynamical network without delay is considered and impulsive synchronization criteria are obtained. In [10, 11], networks with switching topology as special cases of time-varying networks are well investigated. Nevertheless, many phenomena occurring in the real world indicate that the current state of a node is affected by the outdated states of its neighbor nodes. Therefore, taking time-varying delay into account is essential for better investigating them [12–14]. Up to now, a network with time-varying topology and delay has seldom been considered and deserves further studies.
Synchronization is an interesting collective dynamical behavior and has extensive applications in many fields such as regulation of power grid, parallel image processing, the operation of no-man air vehicle, the realization of chain detonation, etc. [15, 16]. Due to complexity of networks, achieving synchronization is difficult only relying on inner adjustments of network. Therefore, how to design proper controllers is a key issue. Researchers adopt different control schemes to design effective controllers, e.g., feedback control [17–19], impulsive control [20–31], intermittent control [32, 33], and so on. As a representative control scheme, impulsive control has received much attention from various fields. Due to working on the nodes only at inconsecutive instants, low cost is one of the most significant advantages of impulsive control. The impulsive gains and intervals are important parameters of impulsive controllers, and thus providing synchronization criteria for choosing appropriate impulsive gains and intervals is a key step. Generally, researchers need to choose those parameters repeatedly for different networks. In order to avoid repetitive choosing, researchers introduce adaptive strategy to improve proper controllers and make them unified.
Motivated by the above discussions, synchronization of a network with time-varying topology and delay is investigated. Impulsive control scheme is adopted to design proper controllers for achieving synchronization. In order to make controllers unified, adaptive strategy is introduced to design adaptive impulsive controllers. Correspondingly, a synchronization criterion is obtained on the basis of the linear matrix inequality technique and the Lyapunov function and generalized to adaptive case. Noticeably, the impulsive gains can adjust themselves to proper values in terms of the updating laws, and intervals can be estimated by solving a sequence of maximum value problems. In Section 2, the network model is introduced and some preliminaries are given. In Section 3, the impulsive controllers for achieving synchronization are designed and the sufficient conditions are provided. In Section 4, several numerical simulations are performed to verify the results. In Section 5, the conclusion for this paper is drawn.
2 Model description and preliminaries
Consider a dynamical network consisting of N nodes with time-varying topology and delay, which is described by
where \(z_{k}(t)=(z_{k1}(t),z_{k2}(t),\ldots ,z_{kn}(t))^{T}\in R^{n}\) is the state variable of node k, \(k=1,2,\ldots ,N\), \(g:R^{n}\to R ^{n}\) is a vector function, \(B=\operatorname{diag}(b_{1},b_{2},\ldots ,b_{n})\) is the inner coupling matrix, \(\xi (t)\geq 0\) is the time-varying coupling delay. \(U(t)=(\mu_{kj}(t))\in R^{N\times N}\) is the zero-row-sum outer coupling matrix at time t denoting the network topology and defined as follows: if node j has influence on node k (\(k\neq j\)) at time t, then \(\mu_{kj}(t)\neq 0\); otherwise, \(\mu_{kj}(t)=0\).
Network (1) is said to achieve synchronization if \(\lim_{t\rightarrow \infty }\Vert z_{k}(t)-w(t) \Vert =0\), where \(w(t)\) satisfies \(\dot{w}(t)=g(w(t))\).
For achieving the synchronization, impulsive controllers are designed and applied onto networks (1). The controlled networks are described by
where \(k=1,2,\ldots ,N\) , \(\psi =1,2,\ldots \) , the impulsive time instant \(t_{\psi }\) satisfies \(0=t_{0}< t_{1}< t_{2}<\cdots <t_{\psi }<\cdots \) , and \(t_{\psi }\to \infty \) as \(\psi \to \infty \). \(z_{k}(t_{\psi } ^{+})=\lim_{t\rightarrow t_{\psi }^{+}}z_{k}(t)\), \(z_{k}(t_{\psi } ^{-})=\lim_{t\rightarrow t_{\psi }^{-}}z_{k}(t)\). Any solution of (2) is assumed to be left continuous at each \(t_{\psi }\), i.e., \(z_{k}(t_{\psi }^{-})=z_{k}(t_{\psi })\). \(\vartheta (t_{\psi })\) is the impulsive gain at \(t=t_{\psi }\) and \(\vartheta (t)=0\) for \(t\neq t _{\psi }\).
Let \(\hat{g}(e_{k}(t))=g(z_{k}(t))-g(w(t))\), \(e_{k}(t)=z_{k}(t)-w(t)\) be the synchronization errors, then the error systems are
Assumption 1
[5]
Suppose that there exists a positive constant L such that
holds for any \(x(t),y(t)\in R^{n}\) and \(t>0\).
Remark 1
The function \(g(x)\) is \(QUAD((L+\kappa )I,\kappa )\) in [34], where κ is any real positive scalar.
Assumption 2
[5]
Suppose that the time-varying coupling delay \(\xi (t)\) is differentiable and there exist two constants \(\rho <1\) and \(\xi^{*}>0\) such that \(\dot{\xi }(t) \leq \rho \) and \(\xi (t)\leq \xi^{*}\).
3 Main results
Let \(E(t)= ((e_{1}(t))^{T}, (e_{2}(t))^{T},\ldots , (e_{N}(t))^{T} )^{T}\), \(d=2L+\frac{1}{1-\rho }\), \(\sigma_{\psi }=t_{\psi }-t_{ \psi -1}\) be the impulsive intervals, I be an identity matrix with appropriate dimension, \(\lambda_{\max }\) be the largest eigenvalues of \(dI+(U(t)\otimes B)(U(t)\otimes B)^{T}\), \(\mathcal{G}(t,\xi (t))=\{ \eta \mid t-\xi (t)< t_{\eta }< t, \eta =1,2,\ldots \}\), \(\underline{ \mathcal{G}}(t,\xi (t))\) and \(\overline{\mathcal{G}}(t,\xi (t))\) be the minimum and maximum values of \(\mathcal{G}(t,\xi (t))\), \(\delta (t)=(1+ \vartheta (t))^{2}\), from the definition of \(\vartheta (t)\), we have \(\delta (t)=1\) for \(t\neq t_{\psi }\).
Theorem 1
Suppose that Assumptions 1 and 2 hold. If there exists a constant \(\gamma >0\) such that
holds, then network (2) can achieve synchronization.
Proof
Consider the following Lyapunov function:
for \(t\in (t_{\psi -1},t_{\psi }]\), \(\psi =1,2,\ldots \) .
When \(t\in (t_{\psi -1},t_{\psi })\),
and the derivative of \(V(t)\) is
According to Assumptions 1 and 2,
which gives
When \(t=t_{\psi }\),
When \(\psi =1\), from inequalities (5) and (6),
When \(\psi =2\),
By mathematical induction, for any positive integer ψ,
If condition (4) holds,
and
which implies \(V(t_{\psi }^{+})\rightarrow 0\) as \(\psi \rightarrow \infty \).
Then, for \(t\in (t_{\psi },t_{\psi +1}]\),
which implies \(V(t)\rightarrow 0\) as \(t\rightarrow \infty \), i.e., the synchronization is achieved. This completes the proof. □
Remark 2
It is clear that \(V(t)\) is the quadratic sum of synchronization errors, i.e., \(V(t)\geq 0\) and \(V(t)=0\) if and only if \(e_{k}(t)=0\), \(k=1,2,\ldots ,N\). In particular, if the set \(\mathcal{G}(t,\xi (t))\) is an empty set, the Lyapunov function is
if the set \(\mathcal{G}(t,\xi (t))\) only has an element ϱ, \(\underline{\mathcal{G}}(t,\xi (t))=\overline{\mathcal{G}}(t,\xi (t))= \varrho \),
Remark 3
From condition (4), it is easy to see the relationship among system parameters, impulsive gains and impulsive intervals. Clearly, for any given network, we can calculate the needed impulsive gains and intervals such that condition (4) holds. As we know, different networks usually have different system parameters. That is, impulsive controllers with fixed impulsive gains and intervals are not always valid for different networks. In the following, we introduce adaptive strategy to design unified impulsive controllers.
Theorem 2
Suppose that Assumptions 1 and 2 hold. If there exists a constant \(\gamma >0\) such that
holds, where \(\dot{\widehat{M}}(t)=\varepsilon \sum_{k=1}^{N}e_{k} ^{T}(t)e_{k}(t)\) and \(\varepsilon >0\) is the adaptive gain, then network (2) can achieve synchronization.
Proof
Consider the following Lyapunov function:
for \(t\in (t_{\psi -1},t_{\psi }],\psi =1,2,\ldots \) .
When \(t\in (t_{\psi -1},t_{\psi })\),
and the derivative of \(V(t)\) is
which gives
When \(t=t_{\psi }\),
Thus, similar to the proof of Theorem 1, the proof can be completed. □
Remark 4
Generally, when the impulsive interval \(\sigma_{ \psi }\) is fixed, for any given γ, we can choose
such that condition (7) holds, where ϱ is an arbitrary small positive constant.
Remark 5
From condition (7), when \(\vartheta (t_{ \psi })\) and γ are fixed, we can estimate the control instants \(t_{\psi }\) through finding the maximum value of
with \(t_{0}=0\), \(\psi =1,2,\ldots \) .
4 Numerical illustrations
In this section, we provide two numerical examples to demonstrate the effectiveness of the theoretical results. Choose the inner coupling matrix B as an identity matrix and time-varying delay as \(\xi (t)=(1-\cos (t))/2\). We choose \(\rho =1/2\) such that Assumption 2 holds. In addition, choose the initial values of \(z_{k}(t)\) and \(w(t)\) randomly.
Example 1
Consider synchronization of a six-node network via impulsive control. Choose the node dynamics as the Chen system [35]
Choose the time-varying outer coupling matrix \(U(t)\) as
with \(U_{11}(t)=-\sin (t)-\exp (-t)-2\cos (t)-1\), \(U_{22}(t)=-2 \cos (t)-\exp (-t)-2\sin (t)\), \(U_{33}(t)=-\sin (t)-\exp (-t)-\cos (t)-2\), \(U_{44}(t)=-2\sin (t)- \exp (-t)-2\), \(U_{55}(t)=-2\sin (t)-\cos (t)-\exp (-t)-1\), \(U_{66}(t)=-2 \exp (-t)-\cos (t)-2\). According to [36], there exists a constant \(L=53\) such that Assumption 1 holds. Figure 1 shows the eigenvalue of \(dI+(U(t)\otimes B)(U(t)\otimes B)^{T}\) versus t. Then the maximum eigenvalue is \(\lambda_{\max }=108.275\). Choose the impulsive gains \(\vartheta (t_{\psi })=-0.999\) and the impulsive intervals as \(\sigma_{\psi }=0.12\). We have \(\ln \delta (t_{\psi })+ \gamma +\lambda_{\max }\sigma_{\psi }=-0.821<0\) with \(\gamma =0.001\), and thus condition (4) holds. Figure 2 shows the orbits of synchronization errors \(e_{kj}(t)\).

The eigenvalue of \(\pmb{dI+(U(t)\otimes B)(U(t)\otimes B)^{T}}\) versus t .

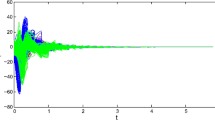
The orbits of \(\pmb{e_{kj}(t)}\) .
Example 2
Consider the same network in Example 1 via adaptive impulsive control.
Firstly, choose the impulsive intervals \(\sigma_{\psi }=0.12\), \(\varepsilon =0.00025\), \(\gamma =0.001\) and \(\widehat{M}(0)=0.05\). According to Remark 2, choose
with \(\varrho =0.001\). Figure 3 shows the orbits of synchronization errors \(e_{kj}(t)\) and Figure 4 shows the impulsive gain \(\vartheta (t_{\psi })\).

The orbits of \(\pmb{e_{kj}(t)}\) .

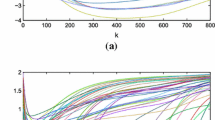
The impulsive gain \(\pmb{\vartheta (t_{\psi })}\) .
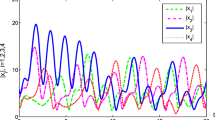
Secondly, choose the impulsive gain \(\vartheta (t_{\psi })=-0.999\), \(\widehat{M}(0)=0.05\), \(\gamma =0.001\) and \(\varepsilon =0.0006\). The impulsive instants can be estimated in terms of Remark 3. Figure 5 shows the orbits of synchronization errors \(e_{kj}(t)\) and Figure 6 shows impulsive interval \(\sigma_{\psi }\).

The orbits of \(\pmb{e_{kj}(t)}\) .

The impulsive interval \(\pmb{\sigma_{\psi }}\) .
In Example 2, we need not calculate \(\lambda_{\max }\) in advance. In Figure 6, the impulsive interval converges to 0.96 when the network achieves synchronization. It is larger than the estimated value 0.12 in Example 1. That is, adaptive impulsive control scheme can make the impulsive interval as large as possible through choosing proper parameters.
5 Conclusions
This paper investigates synchronization of the network with time-varying topology and delay. Combined with proper impulsive controllers, the network achieves synchronization, and we obtain a simple synchronization criterion. Further, we introduce adaptive strategy, make the impulsive controllers unified and obtain an adaptive synchronization criterion as well. Noticeably, when the impulsive interval is fixed, the impulsive gain can reach a proper value by adjusting itself; when the impulsive gain is fixed, we can estimate the impulsive interval by solving a sequence of maximum value problems. Finally, we consider a network coupled with six Chen systems to verify the obtained results.
References
Wang, J, Yang, Z, Huang, T, Xiao, M: Local and global exponential synchronization of complex delayed dynamical networks with general topology. Discrete Contin. Dyn. Syst., Ser. B 16, 393-408 (2011)
Zheng, C, Cao, J: Robust synchronization of coupled neural networks with mixed delays and uncertain parameters by intermittent pinning control. Neurocomputing 141, 153-159 (2014)
Wang, X, Li, C, Huang, T, Chen, L: Impulsive exponential synchronization of randomly coupled neural networks with Markovian jumping and mixed model-dependent time delays. Neural Netw. 60, 25-32 (2014). doi:10.1016/j.neunet.2014.07.008
Kohar, V, Ji, P, Choudhary, A, Sinha, S, Kurths, J: Synchronization in time-varying networks. Phys. Rev. E 90, Article ID 022812 (2014)
Zhang, L, Wang, Y, Huang, Y, Chen, X: Delay-dependent synchronization for non-diffusively coupled time-varying complex dynamical networks. Appl. Math. Comput. 259, 510-522 (2015)
Bhowmick, S, Amritkar, R, Dana, S: Experimental evidence of synchronization of time-varying dynamical network. Chaos 22, Article ID 023105 (2012)
Wu, Z, Gong, X: Impulsive synchronization of time-varying dynamical network. J. Appl. Anal. Comput. 6, 94-102 (2016)
Zhang, L, Wang, Y, Huang, Y: Synchronization for non-dissipatively coupled time-varying complex dynamical networks with delayed coupling nodes. Nonlinear Dyn. 82, 1581-1593 (2015)
Lu, J, Chen, G: A time-varying complex dynamical network model and its controlled synchronization criteria. IEEE Trans. Autom. Control 50, 841-846 (2005)
Li, C, Yu, X, Liu, Z, Huang, T: Asynchronous impulsive containment control in switched multi-agent systems. Inf. Sci. 370-371, 667-679 (2016). doi:10.1016/j.ins.2016.01.072
Li, C, Yu, W, Huang, T: Impulsive synchronization schemes of stochastic complex networks with switching topology: average time approach. Neural Netw. 54, 85-94 (2014)
Zheng, S: Projective synchronization in a driven-response dynamical network with coupling time-varying delay. Nonlinear Dyn. 69, 1429-1438 (2012)
Xu, Y, Zhou, W, Fang, J, Sun, W, Pan, L: Adaptive synchronization of stochastic time-varying delay dynamical networks with complex-variable systems. Nonlinear Dyn. 81, 1717-1726 (2015)
Cao, J, Lu, J: Adaptive synchronization of neural networks with or without time-varying delay. Chaos 16, Article ID 013133 (2006)
Andrew, L, Li, X, Chu, Y, Zhang, H: A novel adaptive-impulsive synchronization of fractional-order chaotic systems. Chin. Phys. B 24, Article ID 100502 (2015)
Chen, G, Wang, X, Li, X: Introduction to Complex Networks: Models, Structure and Dynamics. High Education Press, Beijing (2012)
Tong, D, Zhou, W, Zhou, X, Yang, J, Zhang, L, Xu, Y: Exponential synchronization for stochastic neural networks with multi-delayed and Markovian switching via adaptive feedback control. Commun. Nonlinear Sci. Numer. Simul. 29, 359-371 (2015)
Novicenko, V: Delayed feedback control of synchronization in weakly coupled oscillator networks. Phys. Rev. E 92, Article ID 022919 (2015)
Tang, S, Pang, W, Cheke, R, Wu, J: Global dynamics of a state-dependent feedback control system. Adv. Differ. Equ. 2015, Article ID 322 (2015)
Lu, J, Wang, Z, Cao, J, Ho, D, Kurths, J: Pinning impulsive stabilization of nonlinear dynamical networks with time-varying delay. Int. J. Bifurc. Chaos Appl. Sci. Eng. 22, Article ID 1250176 (2012)
Mahdavi, N, Menhaj, M, Kurths, J, Lu, J, Afshar, A: Pinning impulsive synchronization of complex dynamical networks. Int. J. Bifurc. Chaos Appl. Sci. Eng. 22, Article ID 1250239 (2012)
Lu, J, Kurths, J, Cao, J, Mahdavi, N, Huang, C: Synchronization control for nonlinear stochastic dynamical networks: pinning impulsive strategy. IEEE Trans. Neural Netw. Learn. Syst. 23, 285-292 (2012)
Lu, J, Ho, D, Cao, J, Kurths, J: Single impulsive controller for globally exponential synchronization of dynamical networks. Nonlinear Anal., Real World Appl. 14, 581-593 (2013)
Wu, Z, Wang, H: Impulsive pinning synchronization of discrete-time network. Adv. Differ. Equ. 2016, Article ID 36 (2016)
Wang, F, Yang, Y, Hu, A, Xu, X: Exponential synchronization of fractional-order complex networks via pinning impulsive control. Nonlinear Dyn. 82, 1979-1987 (2015)
Zhao, H, Li, L, Peng, H, Xiao, J, Yang, Y, Zheng, M: Impulsive control for synchronization and parameters identification of uncertain multi-links complex network. Nonlinear Dyn. 83, 1437-1451 (2016)
Sun, W, Lu, J, Chen, S, Yu, X: Pinning impulsive control algorithms for complex network. Chaos 24, Article ID 013141 (2014)
Yang, X, Cao, J, Lu, J: Stochastic synchronization of complex networks with nonidentical nodes via hybrid adaptive and impulsive control. IEEE Trans. Circuits Syst. I, Regul. Pap. 59, 371-384 (2012)
Li, C, Liao, X, Yang, X, Huang, T: Impulsive stabilization and synchronization of a class of chaotic delay systems. Chaos 15, Article ID 043103 (2005)
Huang, T, Li, C, Duan, S, Starzyk, J: Robust exponential stability of uncertain delayed neural networks with stochastic perturbation and impulse effects. IEEE Trans. Neural Netw. Learn. Syst. 23, 866-875 (2012)
Gong, X, Wu, Z: Adaptive pinning impulsive synchronization of dynamical networks with time-varying delay. Adv. Differ. Equ. 2015, Article ID 240 (2015)
Liu, X, Chen, T: Synchronization of complex networks via aperiodically intermittent pinning control. IEEE Trans. Autom. Control 60, 3316-3321 (2015)
Li, N, Cao, J: Periodically intermittent control on robust exponential synchronization for switched interval coupled networks. Neurocomputing 131, 52-58 (2014)
DeLellis, P, Bernardo, M, Russo, G: On QUAD, Lipschitz, and contracting vector fields for consensus and synchronization of networks. IEEE Trans. Circuits Syst. I, Regul. Pap. 58, 576-583 (2011)
Chen, G, Ueta, T: Yet another chaotic attractor. Int. J. Bifurc. Chaos Appl. Sci. Eng. 09, 1465-1466 (1999)
Yu, W, Chen, G, Lü, J: On pinning synchronization of complex dynamical networks. Automatica 45, 429-435 (2009)
Acknowledgements
This work is jointly supported by the NSFC under Grant No. 61463022, the NSF of Jiangxi Province under Grant No. 20161BAB201021, and the Graduate Innovation Project of Jiangxi Normal University under Grant No. YJS2016067.
Author information
Authors and Affiliations
Contributions
All the authors contributed equally to this work. They all read and approved the final version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Leng, H., Wu, Z. Impulsive synchronization of a network with time-varying topology and delay. Adv Differ Equ 2017, 299 (2017). https://doi.org/10.1186/s13662-017-1361-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-017-1361-5