
Abstract
This paper is devoted to a Bitsadze-Samarskii type overdetermined multipoint nonlocal boundary value problem (NBVP). This inverse problem is reduced to an auxiliary multipoint NBVP. Stability estimates for the solution of the auxiliary NBVP are established. The finite difference method is applied to get the first and second order of accuracy of approximate solutions of the abstract overdetermined problem. Stability estimates for the solution of difference problems are proved. Then the established abstract results are applied to get stability estimates for the solution of the Bitsadze-Samarskii type overdetermined elliptic multidimensional differential and difference problems with multipoint nonlocal boundary conditions (NBVC). Finally, numerical results with explanation on the realization for two dimensional and three dimensional elliptic overdetermined multipoint NBVPs in test examples are presented.
Similar content being viewed by others

1 Introduction
The theory and methods of the solutions of inverse problems of determining the parameter of partial differential equations have been extensively studied by several researchers (see [1–19] and the references therein).
The well-posedness of source identification problems for elliptic type differential and difference equations was studied in [12–19]. These papers were devoted to various inverse elliptic problems and their approximations. For abstract elliptic equations in general \(L_{p}\) spaces and some exposition on practical applications of inverse problems we refer to [20, 21] and the references therein.
In recent years, Bitsadze-Samarskii type NBVPs have been investigated extensively (see [22–27]).
Let A be a self-adjoint positive definite operator (SAPD) in an arbitrary Hilbert space H. Then \(B=A^{\frac{1}{2}}\) is also an SAPD operator. One assumes that the smooth function \(f ( \cdot ) \), elements \(\varphi ,\psi,\zeta\in D(B)\), numbers \(\lambda_{0}\), \(\lambda_{i}\), \(i=1,\ldots,q\), and nonnegative real coefficients \(k_{i}\), \(i=1,\ldots,q\), are given. In [8], the Bitsadze-Samarskii type inverse elliptic problem of finding an element \(p\in H\) and a function \(u ( \cdot ) \in C^{2} ( [ 0,T ] , H ) \cap C ( [ 0,T ] , D(A) ) \) such that
was studied. Here \(\lambda_{1},\ldots,\lambda_{q} \) such that \(0<\lambda _{1}<\lambda_{2}<\cdots<\lambda_{q}<T\).
Under the conditions
the theorem on the solvability and uniqueness of the solution of problem (1) was proved.
Denote by \(C(H)\), \(C^{\alpha}(H)\), and \(C_{0T}^{\alpha,\alpha}(H)\) the corresponding Banach spaces of smooth H-valued functions u on \([0,T]\) with the following norms:
Lemma 1
The following inequalities are fulfilled ([28]):
In beginning of this paper, we discuss stability estimates for the solution of the overdetermined problem (1). Next, we apply the finite difference method and establish stability estimates for the first and second order of accuracy difference schemes. Later, we consider Bitsadze-Samarskii type overdetermined elliptic multidimensional differential and difference problems with multipoint NBVC and we obtain stability estimates for their solutions. Finally, we present numerical results with an explanation on the realization for two dimensional and three dimensional elliptic overdetermined multipoint NBVP in test examples.
2 Overdetermined differential problem
Let us take \(Q= ( I-e^{-2TB} ) ^{-1}\). It is well known that ([9]) the function
is the Green function for the following elliptic problem with second kind boundary conditions:
Under the assumptions that \(\varphi,\xi\in D(B)\), \(f ( \cdot ) \in C^{1} ( [ 0,T ] ,H ) \), the solution of problem (5) is defined by the equation ([9])
Moreover, the derivative is given by the formula
Let us take \(\alpha\in(0,1)\). To formulate our results, we use the notation
Theorem 1
Suppose that A is an SAPD operator, condition (2) for coefficients is valid, \(\varphi,\psi,\zeta\in D(A)\cap D(A^{-\frac{1}{2}})\), and \(f(t)\in C_{0T}^{\alpha,\alpha}(H)\). Then for the solution \((p,u(t))\) of problem (1) the following stability estimates hold:
where \(M ( \delta ) \) does not depend on α, φ, ψ, ζ, and \(f(t)\).
Proof
Applying the substitution
we get the auxiliary nonlocal boundary value problem:
to find a function \(v ( \cdot ) \).
Thus, we consider the algorithm to solve (1) which includes three stages. In the first stage, we solve the nonlocal boundary value problem (12). In the second stage, we put \(t=\lambda_{0}\), and find \(v(\lambda_{0})\). Then we obtain an element p by the formula
In the third stage, we use equation (11) to find \(u(t)\).
In [22–27], the well-posedness of the Bitsadze-Samarskii type nonlocal BVP (12) in the case of \(q=1\) and its applications were investigated. The stability and coercive stability estimates for the solution of problem (12) were established.
Taking into account equation (7) in the nonlocal condition of problem (12), we get the equation
to find \(v_{t}(T)\). In ([23]), the authors proved that the operator
has an inverse and its norm is bounded by
So, we can obtain a solution of problem (5) by
Applying estimates (2), (3), (15), and the Cauchy-Schwartz and the triangle inequalities, we can obtain
From (17) it follows that
By using (13),(16) and (3), the estimates (9) and (10) can be established.
From (11), (13), (16), (18), and the triangle inequalities the estimate (8) follows. □
Theorem 2
Under the assumptions that A is an SAPD operator, condition (2) for the coefficients is valid, \(\varphi,\psi ,\zeta\in D(A)\cap D(A^{\frac{1}{2}}) \) and \(f(t)\in C_{0T}^{\alpha,\alpha }(H)\) (\(0<\alpha<1 \)), and the solution \((p,u(t))\) of problem (1) obeys the following coercive inequality:
where \(M ( \delta ) \) is independent of α, φ, ψ, ζ, and \(f(t)\).
Proof
Applying (11) and (16), we have
The proof of estimate (20) is based on equation (21) and the estimates (3). □
3 Difference schemes for problem (1)
Since A is an SAPD operator, the operator \(C=\frac{1}{2}(\tau A+\sqrt{ 4A+\tau^{2}A^{2}})\) will be an SAPD operator, too ([29]). Denote \(R=(I+\tau C)^{-1}\), \(P=(I-R^{2N})^{-1}\), \(D=(I+\tau C)(2I+\tau C)^{-1}C^{-1}\).The bounded operator R is defined on the whole space H.
Lemma 2
[28]
The following estimates hold:
Lemma 3
Under the assumptions that (2) is valid, the operator
has inverse \(G_{1}^{-1}\) and the following estimate holds:
Lemma 4
Under the assumptions that (2) is valid, the operator
has inverse \(\Delta_{2}^{-1}\) and the following estimate holds:
It is well known that [28]
is a solution of the direct problem
Let \([\cdot]\) be the notation of the greatest integer function, and
We consider the first and second order of accuracy difference schemes (ADSs) for the nonlocal problem (1). First, by using the approximate formulas
problem (1) is reduced to the first order of the ADS
Second, applying the approximate formulas
problem (1) can be reduced to the second order of the ADS,
Introduce the set of grid points \(\{ t_{k}=k\tau, 1\leq k\leq N-1, N\tau=T \} \) and the spaces \(C_{\tau}(H)\), \(C_{\tau}^{\alpha }(H)\), and \(C_{\tau}^{\alpha,\alpha}(H)\) (\(\alpha\in (0,1)\)) of H-valued grid functions \(f_{\tau}= \{ f_{k} \} _{k=1}^{N-1}\) with the corresponding norms,
Theorem 3
Under the assumptions that \(\varphi,\psi,\zeta\in D(A)\), \(f_{\tau}\in C_{\tau}^{\alpha,\alpha}(H) \) the solution \(( p, \{ u_{k} \} _{k=1}^{N-1} ) \) of the difference problems (28) and (30) in \(C_{\tau}(H)\times H \) obeys the following stability estimates:
where \(M ( \delta,\lambda_{1},\ldots,\lambda_{q} ) \) does not depend on parameters τ, α, elements φ, ψ, ξ, and the grid function \(f_{\tau}\).
Proof
Applying equation (11) at the point \(t=t_{k}\) to the difference problem (28) , we get the auxiliary nonlocal difference problem
By using (25), and the local and nonlocal conditions of problem (34), one can get the system of equations
to find \(v_{0} \) and \(v_{N}\), where
It easy to check that the determinant of system (35) is defined by equation (22). Since the operator \(\Delta_{1}\) has a bounded inverse, we obtain the solution of (35),
Hence, problem (34) has a unique solution \(\{ v_{k} \} _{k=0}^{N}\) and it is defined by equations (25), (37).
Applying equation (11) to the difference problems (30), we have the auxiliary nonlocal difference problem
Later, by using the local and nonlocal conditions of problem (38), we have the following system of equations:
where
Since the operator \(\Delta_{2}\) has bounded inverse, we obtain the solution of (39) in the following form:
Thus, problem (34) has a unique solution \(\{ v_{k} \} _{k=0}^{N}\) and it is defined by equations (25), (42). Applying equations (25), (37), (42) and the method of [28], we get
for the solutions of both difference problems (34), (38). The proofs of the estimates (32), (33) for the solutions of the difference problems (34), (38) are based on equation (11) and estimates (43), (44). By using equation (11) and estimates (43), (32), we can get estimate (31). □
Denote by F an SAPD operator in a Hilbert space H, introduce \(E_{\alpha }=E_{\alpha} ( D ( F ) ,H ) \), the Banach space of such functions \(u\in H\) for which the norm
is finite.
Theorem 4
Under the assumptions \(\varphi,\psi,\zeta\in D(C)\), \(f_{\tau}\in C_{\tau}^{\alpha,\alpha}(H)\) (\(\alpha\in(0,1)\)) the solution \(( p, \{ u_{k} \} _{k=1}^{N-1} ) \) of the difference problems (28) and (30) obeys the coercive stability estimate
where \(M ( \delta,\lambda_{1},\ldots,\lambda_{q} ) \) is independent from parameters τ, α, elements φ, ψ, ξ, and the grid function \(f_{\tau}\).
4 Multidimensional elliptic problem
Now, we give the application of the abstract Theorems 1 and 3.
Let \(\Omega=(0,\ell)\times\cdots\times(0,\ell)\) be the open cube in the n-dimensional Euclidean space with boundary S, \(\overline {\Omega}=\Omega\cup S \) and numbers \(\lambda_{0}\), \(\lambda_{i}\), \(i=1,\ldots,q\) (\(0<\lambda_{1}<\lambda_{2}<\cdots<\lambda_{q}<T\)) and nonnegative real coefficients \(k_{i}\), \(i=1,\ldots,q\), be given, condition (2) for coefficients be valid, \(x=(x_{1},\ldots,x_{n})\). Consider the inverse problem of finding functions \(p(x)\) and \(u(t,x)\) for the multidimensional elliptic equation in \([0,T]\times\Omega\),
Here, \(\sigma>0\) is a known number, \(a_{r}(x)\) (\(x\in\Omega\)), \(\varphi (x)\), \(\psi(x)\), \(\zeta(x)\) (\(x\in\overline{\Omega}\)), and \(f(t,x)\) (\(t\in (0,1)\), \(x\in\Omega\)) are given smooth functions, \(a_{r}(x)\geq a>0\) (\(x\in \Omega\)).
It is well known that the differential expression [28]
defines a self-adjoint positive definite operator \(A^{x}\) acting on \(L_{2}(\overline{\Omega})\) with the domain \(D(A^{x})= \{ u(x)\in W_{2}^{2}(\overline{\Omega}), u=0\text{ on }S \} \).
Let H be the Hilbert space \(L_{2}(\overline{\Omega})\). Denote by \(C_{0T}^{\alpha,\alpha}(L_{2}(\overline{\Omega}))\) the space obtained by completion of the space of all smooth \(L_{2}(\overline{\Omega})\)-valued functions ρ on \([0,1]\) with the norm
Applying the abstract Theorems 1 and 3, we get the following estimates for the solution of problem (46).
Theorem 5
Assume that \(A^{x}\) is defined by equation (47), condition (2) for coefficients is valid, \(f\in \mathcal{C}_{0T}^{\alpha,\alpha}(L_{2}(\overline{\Omega})) \) and \(\varphi ,\zeta,\psi\in D(A^{x})\cap D ( ( A^{x} ) ^{-\frac{1}{2} } ) \). Then, for the solutions \((p,u)\) of the inverse boundary value problem (46), the stability estimates
are satisfied, where \(M(\delta)\) is independent of α, \(\varphi (x)\), \(\zeta(x)\), \(\psi(x)\), and \(f(t,x)\).
Now, we will discretize problem (46) into two steps. In the first step, we define the grid spaces
To the differential operator \(A^{x}\) generated by problem (46) we assign the difference operator \(A_{h}^{x}\) defined by the formula
acting in the space of grid functions \(u^{h}(x)\), satisfying the condition \(u^{h}(x)=0\) for all \(x\in S_{h}\). It is well known that \(A_{h}^{x}\) is a self-adjoint positive definite operator.
By using \(A_{h}^{x}\), we arrive at the following BVP:
for a system of ordinary differential equations.
In the second step of discretization, problem (48) is replaced by the following difference schemes:
For the calculation of \(p^{h}(x)\) we have
To formulate our results, let \(L_{2h}=L_{2}(\widetilde{\Omega}_{h})\) and \(W_{2h}^{2}=W_{2}^{2}(\widetilde{\Omega}_{h})\) be spaces of the grid functions \(\rho^{h}(x)=\{\rho(h_{1}m_{1},\ldots,h_{n}m_{n})\}\) defined on \(\widetilde{\Omega}_{h}\), equipped with the norms
Let τ and \(\vert h \vert =\sqrt{h_{1}^{2}+\cdots +h_{n}^{2}}\) be sufficiently small positive numbers.
Theorem 6
For the solutions of the difference schemes (49) and (50) the following stability estimates hold:
where \(M ( \delta,\lambda_{1},\ldots,\lambda_{q} ) \) is independent of τ, α, h, \(\varphi^{h}(x)\), \(\psi^{h}(x)\), \(\zeta^{h}(x)\) and \(\{ f_{k}^{h}(x) \} _{1}^{N-1}\).
The proof of Theorem 6 is based on the symmetry property of the operator \(A_{h}^{x}\) in \(L_{2h}\) and the following theorem on the coercivity inequality for the solution of the elliptic difference problem in \(L_{2h}\).
Theorem 7
[30]
For the solution of the elliptic difference problem
the following coercivity inequality holds:
where M is independent of h and ω.
5 Numerical results
In this section, we present numerical results with explanation on the realization for two dimensional and three dimensional examples of the Bitsadze-Samarskii type overdetermined elliptic multipoint NBVP. The MATLAB program is used to get numerical results.
5.1 Two dimensional example
It is easy to check that pair functions \(p(x)= [ (1+x)\pi^{2}+1 ] \sin(\pi x)-\pi\cos(\pi x)\) and \(u(t,x)= ( \exp ( -t ) +1 ) \sin(\pi x)\) is an exact solution of the following two dimensional overdetermined elliptic three-point NBVP:
where
Denote by \([ 0,1 ] _{\tau}\times [ 0,1 ] _{h}\) the set of grid points depending on the small parameters τ and h
where \(N \tau=1\), \(Mh=1\). Let us
To approximately solve (53), we use an algorithm with three stages. In the first stage, we find a numerical solution of the auxiliary NBVP. We can write
the first order of accuracy in t and the second order of accuracy in x and
the second order of accuracy in t and the second order of accuracy in x difference schemes for corresponding NBVP.
In the second stage, we find \(p_{n}\). It is carried out by
for the first order approximation, and
for the second order approximation.
Both difference problems (54) and (55) can be rewritten in the matrix form
Here, \(g_{n}\) is \((N+1)\times1\) a column matrix, \(A_{n}\), \(B_{n}\), \(C_{n}\) are \((N+1)\times(N+1)\) square matrices, and I is the \((N+1)\times(N+1)\) identity matrix, \(v_{s}\) is the \((N+1)\times1\) matrix \(v_{s}= [ v_{s}^{0} \ \cdots\ v_{s}^{N} ] ^{t}\), \(s=n-1,n,n+1\). Denote
Then
for the first order approximation, and
for the second order approximation.
Finally, in the third stage, we calculate \(\{ u_{n}^{k} \} \) by \(u_{n}^{k}=v_{n}^{k}+\zeta_{n}-v_{n}^{l_{0}}\), and \(u_{n}^{k}=v_{n}^{k}+ \zeta_{n}- ( \mu_{0}v_{n}^{l_{0}+1}- ( \mu_{0}-1 ) v_{n}^{l_{0}} ) \), for the first and second order approximations, respectively.
To solve (56), we use a modification of the Gauss elimination method ([31]). Let \(v_{M}=\overrightarrow{0}\), \(\alpha_{n}\) (\(n=1,\ldots,M-1\)) be \((N+1)\times(N+1)\) square matrices and \(\beta_{n}\) (\(n=1,\ldots,M-1\)) be \((N+1)\times1\) column vectors, \(\alpha_{1}\) be the zero matrix and \(\beta_{1}\) be zero column vector. Searching the solution of (56) by
we get formulas for \(\alpha_{n+1}\), \(\beta_{n+1}\):
Results of numerical calculations are presented in Tables 1-3 for both the first and second order approximations in the cases \(N=M=20, 40, 80\) and 160. Table 1 gives the error between the exact solution of NBVP and the solutions derived by difference schemes. Table 2 contains the error between exact and approximate u. Tables 3 includes the error for p. It can be seen from Tables 1-3 that the second order of the ADS is more accurate compared to the first order of the ADS.
5.2 Three dimensional example
Now, consider the three dimensional overdetermined elliptic two point NBVP
where
It is easy to see that the pair functions \(p(x,y)= ( 2\pi ^{2}+1 ) \sin(\pi x)\sin(\pi y)\) and \(u(t,x,y)= ( e^{-t}+1 ) \sin(\pi x)\sin(\pi y)\) are an exact solution of (57).
Denote by \([ 0,1 ] _{\tau}\times [ 0,1 ] _{h} \times [ 0,1 ] _{h}\) the set of grid points depending on the small parameters τ and h,
Let us take
In the first stage, the difference schemes for the approximate solution of NBVP can be written in the following forms:
and
respectively.
In the second stage, the calculation of \(p_{n}\) (\(n=\overline {1,M-1}\), \(m=\overline{1,M-1}\)) is carried out by
for the first order approximation, and
for the second order approximation.
In the third stage, we calculate \(\{ u_{n}^{k} \} \) by
for the first and second order approximation, respectively.
The difference problems (58) and (59) can be rewritten in the matrix form (56). In this case, \(g_{n}\) is \((N+1)(M+1)\times1\) a column matrix, A, B, C, I are \((N+1)(M+1)\times (N+1)(M+1)\) square matrices, and I is the identity matrix, \(v_{s}\) is the \((N+1)(M+1)\times1\) column matrix such that
Denote
Then
for the first order approximation, and
for the second order approximation.
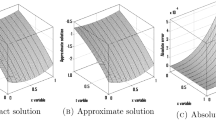
In Tables 4-6, we give the results of the numerical calculations for both first and second order approximations in the cases \(N=M=10, 20, 40\). Table 1 presents the error between exact and approximately solutions of NBVP . Table 2 includes the error between exact and approximate u. Table 3 gives the error for p. It can be seen from Tables 1-3 that the second order of the ADS is more accurate compared with the first order of the ADS.
6 Conclusion
In the present paper, we discuss stability estimates for the solution of a Bitsadze-Samarskii type elliptic overdetermined multipoint NBVP. We apply the finite difference method to construct the first and second order of the ADSs for this problem and establish stability estimates for its solutions. The abstract results established are applied to get stability estimates for the solution of Bitsadze-Samarskii type overdetermined elliptic multidimensional differential and difference problems with multipoint NBVCs. Stability estimates for the solution of difference schemes are obtained. Finally, we present numerical results with explanation on the realization for two dimensional and three dimensional elliptic overdetermined multipoint NBVP in test examples.
Moreover, applying the results of [28, 32, 33] the high order ADSs for the numerical solution of a Bitsadze-Samarskii type elliptic overdetermined multipoint NBVP can be presented.
References
Samarskii, AA, Vabishchevich, PN: Numerical Methods for Solving Inverse Problems of Mathematical Physics. Inverse and Ill-Posed Problems Series. de Gruyter, Berlin (2007)
Kabanikhin, SI: Inverse and Ill-Posed Problems: Theory and Applications. de Gruyter, Berlin (2011)
Kirane, M, Malik, SA, Al-Gwaiz, MA: An inverse source problem for a two dimensional time fractional diffusion equation with nonlocal boundary conditions. Math. Methods Appl. Sci. 36(9), 1056-1069 (2013)
Ashyralyyev, C, Demirdag, O: The difference problem of obtaining the parameter of a parabolic equation. Abstr. Appl. Anal. 2012, Article ID 603018 (2012)
Ashyralyyev, C, Dural, A, Sozen, Y: Finite difference method for the reverse parabolic problem with Neumann condition. AIP Conf. Proc. 1470, 102-105 (2012)
Ashyralyev, A, Erdogan, AS: Well-posedness of the right-hand side identification problem for a parabolic equation. Ukr. Math. J. 66(2), 165-177 (2014)
Kalmenov, TS, Shaldanbaev, AS: On a criterion of solvability of the inverse problem of heat conduction. J. Inverse Ill-Posed Probl. 18, 471-492 (2010)
Orazov, I, Sadybekov, MA: On a class of problems of determining the temperature and density of heat sources given initial and final temperature. Sib. Math. J. 53, 146-151 (2012)
Orlovsky, DG: Inverse problem for elliptic equation in a Banach space with Bitsadze-Samarsky boundary value conditions. J. Inverse Ill-Posed Probl. 21, 141-157 (2013)
Orlovsky, DG, Piskarev, S: The approximation of Bitsadze-Samarsky type inverse problem for elliptic equations with Neumann conditions. Contemp. Anal. Appl. Math. 1(2), 118-131 (2013)
Ashyralyev, A, Agirseven, D: On source identification problem for a delay parabolic equation. Nonlinear Anal., Model. Control 19(3), 335-349 (2014)
Ashyralyyev, C, Dedeturk, M: Approximate solution of inverse problem for elliptic equation with overdetermination. Abstr. Appl. Anal. 2013, Article ID 548017 (2013)
Ashyralyyev, C: Inverse Neumann problem for an equation of elliptic type. AIP Conf. Proc. 1611, 46-52 (2014)
Ashyralyev, A, Ashyralyyev, C: On the problem of determining the parameter of an elliptic equation in a Banach space. Nonlinear Anal., Model. Control 19(3), 350-366 (2014)
Ashyralyyev, C, Akkan, Y: Numerical solution to inverse elliptic problem with Neumann type overdetermination and mixed boundary conditions. Electron. J. Differ. Equ. 2015, 188 (2015)
Ashyralyyev, C, Dedeturk, M: Approximation of the inverse elliptic problem with mixed boundary value conditions and overdetermination. Bound. Value Probl. 2015, 51 (2015)
Ashyralyyev, C, Akyuz, G: Stability estimates for solution of Bitsadze-Samarskii type inverse elliptic problem with Dirichlet conditions. AIP Conf. Proc. 1759, 020129 (2016)
Ashyralyyev, C: A fourth order approximation of the Neumann type overdetermined elliptic problem. Filomat 31(4), 967-980 (2017)
Ashyralyyev, C: Stability estimates for solution of Neumann type overdetermined elliptic problem. Numer. Funct. Anal. Optim. 38(7) (2017). doi:10.1080/01630563.2017.1316993
Shahmurov, R: Solution of the Dirichlet and Neumann problems for a modified Helmholtz equation in Besov spaces on an annulus. J. Differ. Equ. 249(3), 526-550 (2010)
Shahmurov, R: On strong solutions of a Robin problem modelling heat conduction in materials with corroded boundary. Nonlinear Anal., Real World Appl. 13(1), 441-451 (2010)
Ashyralyev, A: A note on the Bitsadze-Samarskii type nonlocal boundary value problem in a Banach space. J. Math. Anal. Appl. 344(1), 557-573 (2008)
Ashyralyev, A, Ozturk, E: On Bitsadze-Samarskii type nonlocal boundary value problems for elliptic differential and difference equations: well-posedness. Appl. Comput. Math. 219(3), 1093-1107 (2012)
Ashyralyev, A, Ozturk, E: On a difference scheme of fourth order of accuracy for the Bitsadze-Samarskii type nonlocal boundary value problem. Math. Methods Appl. Sci. 36, 936-955 (2013)
Ashyralyev, A, Tetikoglu, FSO: FDM for elliptic equations with Bitsadze-Samarskii-Dirichlet conditions. Abstr. Appl. Anal. 2012, Article Number 454831 (2012)
Ashyralyev, A, Tetikoglu, FSO: A note on Bitsadze-Samarskii type nonlocal boundary problems: well-posednesss. Numer. Funct. Anal. Optim. 34(9), 939-975 (2013)
Ashyralyev, A, Tetikoglu, FSO: On well-posedness of nonclassical problems for elliptic equations. Math. Methods Appl. Sci. 37(17), 2663-2676 (2014)
Ashyralyev, A, Sobolevskii, PE: New Difference Schemes for Partial Differential Equations, Operator Theory Advances and Applications. Birkhäuser, Basel (2004)
Krein, SG: Linear Differential Equations in Banach Space. Nauka, Moscow (1966)
Sobolevskii, PE: Difference Methods for the Approximate Solution of Differential Equations. Voronezh State University Press, Voronezh (1975)
Samarskii, AA, Nikolaev, ES: Numerical Methods for Grid Equations, vol. 2. Birkhäuser, Basel (1989)
Ashyralyev, A, Agarwal, RP, Shahmurov, R: Taylor’s decomposition at several points for odd order ordinary DEs. Neural Parallel Sci. Comput. 17, 1-16 (2009)
Dosiyev, AA, Buranay, SC, Subasi, D: The highly accurate block-grid method in solving Laplace’s equation for nonanalytic boundary condition with corner singularity. Comput. Math. Appl. 64(4), 616-632 (2012)
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The author declares that he has no competing interests.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Ashyralyyev, C. Numerical solution to Bitsadze-Samarskii type elliptic overdetermined multipoint NBVP. Bound Value Probl 2017, 74 (2017). https://doi.org/10.1186/s13661-017-0804-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-017-0804-y