
Abstract
In this work, we revisit the perturbations that are generated in the bounce inflation scenario constructed within the framework of f(T) theory. It has been well known that pure f(T) theory cannot give rise to bounce inflation behavior, so aside from the gravity part, we also employ a canonical scalar field for minimal extension. We calculate the perturbations in f(T) theory using the well-established ADM formalism, and find various conditions to avoid their pathologies. We find that it is indeed very difficult to obtain a healthy model without those pathologies, however, one may find a way out if a potential requirement, say, to keep every function continuous, is abandoned.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 introduction
Inflation [1,2,3] has been viewed as one of the most successful theory in modern cosmology. Not only is it simple and elegant, it can also simultaneously solve several cosmological puzzles of Big-Bang, such as horizon, flatness, unwanted relics and so on, as well as predicts nearly scale-invariant power spectrum, which is verified by the observational data [4]. Nonetheless, inflation cannot avoid the notorious Big-Bang Singularity, whose existence has been proved by Hawking and Penrose [5,6,7]. one of the easiest ways of avoiding the singularity point might be to assume that the universe starts from a contracting phase, and bounce into the expanding one as we observed [8]. Together with the inflation period that follows up, this can be called as “bounce inflation” scenario of the early universe [9,10,11].
For the universe to bounce, some conditions must be satisfied, such as the Null Energy Condition violating [12]. In order to do so, one may either introduce exotic matter which can violate the NEC, or modify the classical General Relativity. Recently the studies of bounce cosmology encountered a boost in the literatures and fruitful bounce models are built in both two ways. The first way includes double-scalar-field bounce [13,14,15] and higher-order single-scalar-field bounce [16,17,18,19,20], while the second way includes nonminimal coupling bounce [21, 22], f(R) bounce [23], f(T) bounce [24, 25], Loop-quantum bounce [26] and so on.
In Ref. [27] (see also [28,29,30]), it is proved that it is indeed very difficult for a single scalar to make a alhealthy bounce (inflation) scenarios, which needs to go even beyond Horndeski theory [31,32,33,34]. However, the conclusion only applies to single scalar models, and for modified gravity driven bounces whether there is such “no-go” theorem is unknown. In this paper, we will focus on an interesting type of bounce inflation scenario, driven by the f(T) modified gravity theory. The f(T) theory is an extension of the so-called “Teleparallel Equivalent General Relativity (TEGR)”. Although TEGR, as a torsion theory, is equivalent to General Relativity, f(T) is no longer equivalent to the extension to GR, namely f(R) theory, but act as a totally new theory, with many interesting properties not shared by GR or f(R) theories. For more information on f(T) theory, see reviews [35, 36].
We will perform a detailed investigation of perturbations generated by f(T) modified gravity theory, and apply it into the bounce inflation scenario. Note that the general formulation of perturbations on f(T) has been investigated in, for instance, [37,38,39,40,41,42]. We study on what conditions could the perturbations remain healthy passing through the bounce. The rest of our paper is organized as follows: in Sect. 2 we set up with the basic formulation of f(T) theory, as well as the FRW background analysis which can be applied to the bounce inflation scenario. In Sect. 3, we focus on the perturbations (both tensor and scalar) generated from f(T) theory, respectively, and demonstrate the conditions for a healthy bounce inflation scenario. An explicit example of f(T) bounce inflation scenario satisfying all the conditions are given in Sects. 4, and 5 comes the final remarks.
2 f(T) modified gravity and the bounce inflation ansatz
According to General Relativity, the torsion tensor of a 4-dimensional curved spacetime manifold is defined as:
which is also known as the antisymmetric part of the affine connection \(\Gamma ^{\rho }_{~\mu \nu }\). As is well known, with the existence of torsion tensor, the affine connection \(\Gamma ^{\rho }_{\mu \nu }\) can no longer be expressed in terms of metric, but act as an independent variable. Actually, from this definition, \(\Gamma ^{\rho }_{\mu \nu }\) can be expressed as:
where \({\tilde{\Gamma }}^{\rho }_{~\mu \nu }\) is the Christoffel symbol which can be expressed in terms of metric \(g_{\mu \nu }\), namely \({\tilde{\Gamma }}^{\rho }_{~\mu \nu }=g^{\rho \alpha }(\partial _\nu g_{\mu \alpha }+\partial _\mu g_{\nu \alpha }-\partial _\alpha g_{\mu \nu })/2\), and
is the so-called contorsion tensor. Furthermore, the Ricci scalar R can be calculated as:
where \({\tilde{R}}\) is the Ricci scalar made of Christoffel symbols, and
is the difference between R and \({\tilde{R}}\). In the above formula, \(T_\mu \equiv T^{~~\nu }_{\mu \nu }\) and \(\nabla _\mu T^\mu \equiv \partial _\mu T^\mu -\Gamma ^\mu _{~\mu \nu }T^\nu \) is the covariant derivative of \(T^\mu \).
If there is no torsion, say, \(\Gamma ^{\rho }_{~\mu \nu }\rightarrow {\tilde{\Gamma }}^{\rho }_{~\mu \nu }\) which is symmetric, then \(\Delta R=0\) and R reduces to \({{\tilde{R}}}\) as in GR. However, if we choose \(\Gamma ^{\rho }_{~\mu \nu }\) to be another kind of connection, e.g. \(\Gamma ^{\rho }_{~\mu \nu }=e^\rho _A\partial _\nu e^A_\mu \) (Weitzenbock connection [43]) where \(e^A_\mu \) is the tetrad with an internal index \(A=0,1,2,3\) and a contraction relation \(e^A_\mu e^B_\nu \eta _{AB}=g_{\mu \nu }\) with normal metric \(g_{\mu \nu }\) via a flat metric \(\eta _{AB}=diag(-1,1,1,1)\), one has \({\tilde{R}}=-\Delta R\) and there will be no curvature. However, there could be torsion instead. One can construct the torsion scalar:
which is actually equivalent to \({{\tilde{R}}}\) except a total derivative [37,38,39,40,41,42]:
so an action containing only T as its Lagrangian, as has been demonstrated in the introduction, it is actually nothing but GR, thus is called “Teleparallel Equivalent of General Relativity” (TEGR). As in the case of f(R) modified gravity, TEGR can also be extended to be a function of T. This f(T), however, is different from either GR or even f(R) gravity, and become a totally new theory.
We start with the general action of f(T) modified gravity:
where ef(T) is the gravity part, while \(\mathcal{L}_m\) is the matter part which could be added to the gravity. Moreover, since the connection now is constructed based on the tetrad rather than metric, we use the determinant of \(e^A_\mu \) to construct the invariant volume element, and
which is equivalent to \(\sqrt{-g}\) in Riemann geometry, while \(\epsilon _{ABCD}\) and \(\epsilon ^{\mu \nu \rho \sigma }\) are totally antisymmetric tensors. The background equation of motion can be obtained by varying (8) with respect to \(e^A_\mu \),
As a specific case, let’s consider the cosmological solution, namely the flat FRW spacetime, where the tetrad is given as:
therefore Eq. (10) can be reduced to Friedmann equations:
where \(\rho _m\) and \(p_m\) are energy density and pressure coming from \(\mathcal{L}_m\), and \(_{,T}\) denotes derivative with respect to T. Also note that \(T=-6H^2\) in flat FRW spacetime. For analyzability, it is useful to consider everything as functions of t, so from Eq. (12) one gets
which has a general solution as
where
and \(\lambda \) is the integration constant.
We are focusing on the bounce inflation solution given by f(T) modified gravity theory. The bounce, by definition, is the scenario where the universe goes from contracting phase (\(H<0\)) to expanding phase (\(H>0\)), therefore there must be a pivot point where \(H=0\), \(\dot{H}>0\) is satisfied, which we call the bounce point. However, in absence of the matter part, namely \(\rho _m=p_m=0\), from Eqs. (12) and (13) one can only get a trivial solution of \(f(T)=-T/3+\lambda /\sqrt{-T}\) with an integral constant \(\lambda \), and \(\dot{H}=0\) forever, so no bounce will happen. This is a well-known result [24] and that’s why a matter part will be needed. Moreover, in order to solve the inconsistency problem in usual bounce model with single scalar degree of freedom (namely one cannot both solve the anisotropy problem and get the scale-invariant power spectrum) (last two references in [16,17,18,19,20]), we explore the bounce inflation model where the contracting phase has a large equation of state, \(w\ge 1\), or, in terms of the slow-varying parameter \(\epsilon \equiv 3(1+w)/2\), \(\epsilon \ge 3\), while in expanding phase usual slow-roll conditions for inflation, \(w\simeq -1\), \(\epsilon \simeq 0\), is imposed. Note that other bounce inflation solutions in f(T) theory has been discussed in Ref. [44].
In principle, one can employ the reconstruction method to obtain the functional form of f(T), which gives the bounce inflation solution, as has been done in [24, 45]. However, there will be several conditions coming from perturbations, namely ghost-free and gradient stable conditions for both scalar and tensor perturbations, violating which will make the model pathologic. So before heading to specific models, we will first analyze the perturbation theory of f(T) in a very general form, to find whether these conditions will impose rigid constraints on f(T) models.
3 Perturbations generated from f(T) modified gravity
3.1 \(3+1\) decomposition
In order to calculate the perturbations in f(T) bounce inflation scenario, first of all we write down the tetrads containing perturbation as:
where \(a=1,2,3\) is the spatial part of internal indices, N is the lapse function, \(N^a\) is the shift vector, and \(h^a_i\) is the induced 3-vierbein. Note that although the metric is symmetric, the tetrad used to construct it does not need to be symmetric, therefore \({\tilde{N}}_i\) and \(N^a\) has independent components. However, both \({\tilde{N}}_i\) and \(N^a\) can be decomposed into a pure vector and gradient of a scalar, say, \({\tilde{N}}_i=\partial _i\beta +u_i\), \(N^a=\delta ^a_{~i}(\partial _i B+v_i)\) [46]. In this paper we don’t consider vector perturbations, and to make the calculations simpler, hereafter we set \(\beta =0\) as a gauge fixing. By making use of the relation \(e^A_\mu e^B_\nu \eta _{AB}=g_{\mu \nu }\), we can get the line element as:
which is consistent in the result of ADM metric decomposition usually used in Riemannian gravity theories. Note that the index \(a,b,\cdots \) is upper/lowered by \(\delta _{ab}\), \(i,j,\cdots \) is upper/lowered by \(h_{ij}\), and the transfer between them is via \(h^a_i\). Moreover, the determinant of the tetrad is:
The Weitzenbock connection turns out to be
and one can also find that \({}^{(3)}\Gamma ^i_{~jk}=\Gamma ^i_{jk}\), where \({}^{(3)}\Gamma ^i_{~jk}\) is defined using the 3D tetrad, \(h^a_{~i}\). From the above, one can also obtain the torsion tensor as:
where \(\nabla _iN^j=h^{~j}_a\nabla _i{N^a}=h^{~j}_a\partial _i{N^a}\). Moreover, since it is well known that the curvature scalar \(\tilde{R}\) can be decomposed into \(3+1\) form as:
where \({{\tilde{R}}}^{(3)}\) is the 3D curvature scalar,
is the extrinsic curvature in Riemannian gravity theories, and \({{\tilde{\nabla }}}_i\) is the 3D covariant derivative connected with Christoffel symbols. Thus making use of Eq. (7) one can have
where
In the last step we’ve made use of Eqs. (21), (22) and (23). See also [47] for other formulations for torsion gravity.
Besides the gravity part, in principle the matter part can also have perturbations. However, since we mainly focus on the perturbations generated in f(T) gravity, we for simplicity assume the matter part consists of a background fluid or field that is totally homogeneous and isotropic, and temporarily turn off the perturbations for matter part. This is valid if the (isocurvature) perturbations generated by matter is quite small. As an explicit example, we set it to be a canonical scalar field:
3.2 Perturbations generated from bounce inflation: tensor part
We first consider the tensor perturbations produced from action (8). Since the gravity part is modified, the tensor perturbations are expected to be different from those in GR theories. To analyze the tensor perturbations, we first perturb the tetrad in terms of tensor as:
with other components of \(e^A_{~\mu }\) being zero. Note that since the tensor perturbations decouples with the scalar counterpart at 2nd order level, one can consider them separately. According to the above, the induced 3D metric \(h_{ij}\) can be obtained as:
where \(\gamma _{ij}\equiv \delta _{ab}(\delta _{i}^{a}\gamma _{j}^{b}+\delta _{j}^{b}\gamma _{i}^{a})/2\). Moreover, the transverse and traceless conditions are imposed, namely:
From this, one can get
and from the last equation,
According to Eq. (27), the torsion can be expand (to second order) as:
where there is no first order term, \(\delta T^{(1)}\). Therefore the second order action is:
From this action one can see that it is very much alike that of GR, except for the coefficients in front of both kinetic term and spatial derivative terms are \(f_T\big |_0\), with the sound speed squared being unity. If \(f_{T}=1\), we can get back to GR as it must be. For \(f_{T}\ne 1\) case, in order for the tensor perturbation to be free of both ghost and gradient instabilities, one should require \(f_{T}\) be positive definite. Therefore the first condition to have healthy perturbation is:
1. from stability of tensor perturbation:
Note that this condition is the generalization of the condition \(\partial \mathcal{L}/\partial R>0\) in scalar-tensor gravity, and \(f_R>0\) in f(R) gravity to f(T) gravity, the breaking of which leads to the formation of generic curvature singularity at a spatial hypersurface where this derivative becomes zero [48].Footnote 1
3.3 Perturbations generated from bounce inflation: scalar part
We then consider the scalar perturbation produced from action (8). As in Riemannian gravity theory, we perturb the components in the tetrad as:
and from Eq. (18) one can find \(h^a_{~i}=ae^\zeta \delta ^a_i\), \(h^{~i}_a=(ae^\zeta )^{-1}\delta ^i_a\). Therefore from the definitions in Subsec. 3.1 that
up to second order, which can be combined to give
Moreover, the reduced 3D Ricci scalar is
and the 3D torsion tensor is:
which makes the surface term \(\Delta _T\) as:
Making all the elements together, one can finally get the perturbation of torsion scalar up to second order:
from which the first and second lines are the 0th order and 1st order separately, while the rest lines are the 2nd order.
The variation of the action (8) with respect to the constraint perturbations N and \(N_i\) are:
By setting \(\delta _{N}S=0\), \(\delta _{N_i}S=0\), one can get the constraint equations:
We can expand the above equations to 1st order to solve N and \(N_i\). Using the results (39), (42), (43), (45) and (46) in above subsection, and notice that f(T) and \(f_T(T)\) can be expanded as:
where the subscript ‘0’ means the background value, we can get the solution of N (in terms of \(\alpha \)) and \(N_i\) (in terms of \(\psi \)) as:
where
With the results given in the above subsection, one can obtain the second order perturbed action as:
With Eqs. (39), (53) and (54), one can perform straightforward calculation to obtain:
where “\(^\prime \)” denotes derivative with respect to conformal time, \(\eta \equiv \int a^{-1}(t)dt\), and
where we’ve made use of the relation: \(\dot{f_T}=f_{TT}\dot{T}=-12f_{TT}H{\dot{H}}\). Note that different from f(R) theories, the perturbation action contains also a higher-spatial-derivative term \(\alpha _3(\partial ^2\zeta )^2\). This is due to the fact that the constraint variable \(\alpha \) now contains not only terms \(\sim {{\dot{\zeta }}}\), but also terms \(\sim \partial ^2\zeta \), which is similar to the case of non-trivial kinetic coupling gravity theory explored in [49, 50]. Moreover, from action (60) one has the equation of motion of \(\zeta \), or, the redefined variable \(u\equiv \sqrt{\alpha _1}\zeta \), as
In order to have the theory be free of ghost, one requires that \(\alpha _1>0\) for all the time. Furthermore, from Eq. (64), to eliminate the gradient instability in all region of k, one needs \(\alpha _2>0\), \(\alpha _3>0\) as well. Considering Eqs. (61), (62) and (63), one has the following conditions for stability:
2) from )\(\alpha _1>0\),
3) from \(\alpha _2>0\),
4) from \(\alpha _3>0\),
Note that actually Condition 2) is contained in Condition 4).
3.4 A “no-go theorem”?
In this section, we analyze that under the conditions 1) to 4) obtained from the above subsections, what kind of f(T) theory can survive. Interestingly, we find that, in order to obey all the conditions, one may have very harsh constraints on f(T) theory. To be precise, we compile our results as a “theorem” which we think is useful for construction of bounce (or bounce inflation) scenarios in framework of f(T) theories. The theorem is presented in the following:
- 1.:
-
the gravity theory with pure f(T) cannot give rise to a bounce universe;
- 2.:
-
bounce can be realized with the help of exotic matter, e.g., a canonical scalar field. However, if the field doesn’t contribute the perturbations, then in order for the perturbations be stable within all scales, at least at bounce point \(\dot{f}_T\) cannot be a continuous function with respect to t.
The first item is already demonstrated in the previous Sect. 2. To prove the second item, let’s first introduce a lemma:
Lemma. For any function V(t)which satisfies \(V(t)>0\) for \(t>0\), \(V(t)<0\) for \(t<0\), or vice versa, then at \(t=0\) point, V(t)can either be vanishing, or become discontinuous.
This is easy to prove. if V(t) is continuous acrossing \(t=0\) point, and assume \(V(t=0)=V_*\ne 0\), then we always have a small number \(\varepsilon \), such that \(V(t=0+\varepsilon )\approx V_*+V^\prime _*\varepsilon \), and \(V(t=0-\varepsilon )\approx V_*-V^\prime _*\varepsilon \), where \(V^\prime _*\varepsilon \) is the time derivative of V(t) at \(t=0\). So \(V(t=0+\varepsilon )\cdot V(t=0-\varepsilon )=(V_*+V^\prime _*\varepsilon )(V_*-V^\prime _*\varepsilon )\approx V_*^2-V^{\prime 2}_*\varepsilon ^2\approx V_*^2>0\) for small enough \(\varepsilon \) and regular \(V^\prime _*\varepsilon \). This violates the condition that V(t) changes its sign before and after \(t=0\) point. Proof completed.
Now we prove the second item of the theorem. Since H must change its sign when crossing the bounce point, in order to have \(\alpha _1>0\), i.e., to eliminate the ghost problem, \(\dot{f}_T-3Hf_T\) must change its sign when crossing the bounce point, which we set to be \(t=0\). According to the lemma, \(\dot{f}_T-3Hf_T\) can either cross 0 or become discontinuous. If \(\dot{f}_T-3Hf_T\) crosses 0 at \(t=0\), it means that \(3af_T^2/(\dot{f}_T-3Hf_T)\) gets divergent when t approaches to zero, unless\(f_T\) also goes to zero to compensate the divergence. In that case, as \(3af_T^2/(\dot{f}_T-3Hf_T)\) blows up, its time derivative will be at least positive, and \(f_T\) is also positive considering the stability of tensor perturbations, which gives rise to \(\alpha _2<0\), leading to a gradient instability.
The only loophole is to have \(f_T\) also goes to zero at \(t=0\), as mentioned before. However, it is also impossible. Since \(f_T\) is constrained to be positive either before or after the bounce, \(f_T\rightarrow 0\) means that \(f_T\) decreases (\(\dot{f}_T<0\)) before the bounce, while increases (\(\dot{f}_T>0\)) after the bounce, contradicting with the requirement of \(\alpha _3>0\). Therefore, the only way to have all the three \(\alpha \)’s be positive all the time is to have \(\dot{f}_T-3Hf_T\) discontinuous, at least at \(t=0\).
The discontinuity of \(\dot{f}_T-3Hf_T\) implies that either \(\dot{f}_T\) or \(f_T\) be discontinuous, or both. However, the case where \(f_T\) is discontinuous while \(\dot{f}_T\) is not cannot be true. The reason is that according to the lemma and requirement of positivity of \(\alpha _3\), \(\dot{f}_T\) can either be discontinuous, or cross zero. If \(\dot{f}_T\rightarrow 0\) at \(t=0\), since \(\dot{f}_T-3Hf_T\) cannot cross 0, it means \(f_T\) has to be divergent (to compensate the vanishing of H), and moreover, \(\dot{f}_T-3Hf_T\simeq -3Hf_T\). In this case, one has
where one can see that, every term has a negative value. The first term is because \(\dot{f}_T\) and H must have opposite signs, the second term is because \(\ddot{f}_T\) must be negative while \(\dot{f}_T\) goes continuously from positive value to negative value, and the third term is because both \(\dot{H}\) and \(f_T\) are positive during bounce region. Therefore \(\dot{f}_T\) must be discontinuous at least crossing the bounce point \(t=0\). Hitherto the full proof completed.
Actually, the implication of discontinuous function in cosmology solutions is not rare at all in the literature. For example, in Refs. [51,52,53] people explore interesting observational effects brought by step-like functions in inflation model buildings. In next section, we will give an example of a bounce inflation scenario, which is modeled by f(T) theory with discontinuous \(\dot{f}_T\) at the bounce point.
4 An example
According to the theorem above, in this section, we provide a parameterized model of f(T) theory that could have bounce inflation solution and satisfy all the requirements 1) to 4) for stabilities of perturbations. First of all, we parameterize the scale factor to be:
where we assume that the bounce happens at \(t=0\) point. And according to this, the Hubble parameter can be written as:
Moreover, this parameterization will give the equation of state (EoS) \(w_1=2/(3p_1)-1\) for \(t<0\) and \(w_2=2/(3p_2)-1\) for \(t>0\). Considering the requirement on background demonstrated in Sec. 2, one then has \(0<p_1\le 1/3\) and \(p_2\rightarrow +\infty \). For specific choice, we set \(p_1=1/3\) and \(p_2=100\).
The Torsion scalar T will be
In order to solve f(t) from Eq. (15), we also need to parameterize the scaling of matter density \(\rho _m(t)\). For simplicity, we temporarily let
so that we can write \(\rho _{mi}\sim a^{\frac{2r_i}{p_i}}\) with \(i=1,2\) for \(t</>0\), which can give us the relation between the EoS of matter and that of background given by f(T): \(w_{mi}=-2r_i/p_i-1=-r(1+w_i)-1\). Since both before and after bounce we have \(w_i>-1\), therefore, if we use a single canonical scalar field as we did to describe the matter, such a relation requires that \(r_i<0\) for both before and after the bounce. A more stringent constraint on \(r_i\) will be given by the conditions 1) to 4). They gives i) \(r_i(1+2r_i)>0\), ii) \(-2r_i(1+r_i)/(1+2r_i)>0\), iii) \(r_i(2r_i+3)/[(r_i+1)(2r_i+1)]<0\), respectively, which can be combined to have \(-3/2<r_i<-1\).
Substituting Eqs. (70) and (72) into Eq. (15) one can get
and considering the expression of T in Eq. (71), one has the form of f(T):
and \(i=1,2\), \(\pm =+,-\) for \(t</>0\), respectively.

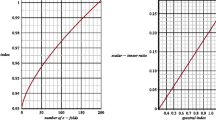
From top to bottom are the plots of \(f_T\), \(\alpha _1\), \(\alpha _2\) and \(\alpha _3\) respectively, with respect to cosmic time t, while \(t=0\) is the bounce point. Note that all these parameters are positive (\(\alpha _i\)’s are plotted in Logarithm scale.) while \(f_T\) presents a sharp peak. The parameters are chosen as: \(a_1=10^{-100}\), \(a_2=\root -1/3 \of {3}/10\), \(t_1=\frac{1}{3}\times 10^{-3}M_p^{-1}\), \(t_2=-0.1M_p^{-1}\), \(p_1=1/3\), \(p_2=100\), \(\rho _{m1}=\root -5/2 \of {3}\times 10^{-5}M_p^4\), \(\rho _{m2}=1M_p^4\), \(\lambda _1=\lambda _2=0\), \(r_1=r_2=-5/4\), \(M_p=1\)
Figure 1 shows the time evolution of the parameters \(\alpha _1\), \(\alpha _2\), \(\alpha _3\) as well as \(f_T\) [derived from Eq. (74)] which describes the stabilities of tensor and scalar perturbations. One can see that although \(f_T\) appears continuous, it forms a sharp peak around the bounce point, demonstrating a discontinuity of its further derivative, \(\dot{f}_T\) (In our numerical calculation, \(\dot{f}_T(0_-)\approx 0.13M_p^3\) while \(\dot{f}_T(0_+)\approx -4.39\times 10^{-4}M_p^3\)). \(\alpha _i\)’s may also be discontinuous as they contain \(\dot{f}_T\), nonetheless, all the parameters remain positive, leading to a totally stable bounce inflation solution. For parameter choices, we choose \(a_1=10^{-100}\), \(a_2=\root -1/3 \of {3}/10\), \(t_1=10^{-3}/3M_p^{-1}\), \(t_2=-0.1M_p^{-1}\), \(p_1=1/3\), \(p_2=100\), \(\rho _{m1}=\root -5/2 \of {3}\times 10^{-5}M_p^4\), \(\rho _{m2}=1M_p^4\), \(\lambda _1=\lambda _2=0\), and \(r_1=r_2=-5/4\), which means \(w_{m1}=3/2\) for contracting phase with \(w_1=1\), and \(w_{m2}\approx -1\) for expanding phase with \(w_2\approx -1\). These choices can ensure the continuity of a(t), T(t), \(\rho _m(t)\) and f(T), however, as all the degrees of freedom are thus used up, one has to abandon the continuities of further derivatives, namely \(\dot{f}_T\).
As a side remark, we note that scalar field with arbitrary EoS larger than \(-\,1\) can be realized by potential parameterization, an example having been given in [54]. In our case, the function form of the potential can be given by
while \(V_{0i}=\rho _{mi}[2+r(1+w_i)]/2\), \(A_i=(1+r_i)/\sqrt{-r_i\rho _i(1+w_i)}\), and \(\phi _0\) is a integral constant. Since according to [54], for \(-3/2<r_i<-1\) the condition for existence of scaling solution, namely the power index \(2r_i/(r_i+1)>2\), is satisfied, therefore with such a parameterized potential, there exists a scaling solution of \(\phi -\phi _{0i}\sim t^{r_i+1}\), which can be used to get (72).
5 Conclusions
In this paper, we investigated the properties of perturbations generated from f(T) modified gravity theory applied to bounce inflation scenario. We calculated the perturbation action of f(T) theory plus a scalar field, and found conditions for obtaining a stable bounce inflation solution. We found it is actually very difficult to satisfy all the conditions, and one way out is to give up the continuity of derivative function of f(T), say, \(\dot{f}_T\). An example of such a solution is also presented.
As a member of the big modified gravity family, f(T) theory has many interesting features that are deserved further investigation. For example, as it breaks the local Lorentz symmetry [55], an interesting idea is to extend the current study to a more general torsion theory which restored the symmetry. One example of such a torsion theory, namely the Cartan theory, has been explored in Ref. [57]. Moreover, since we only consider perturbations from the gravity part. If the matter part also takes the role, the perturbation analysis will be more complicated since isotropic modes of perturbation also involved in. A higher order perturbations (Non-Gaussianities) of the system might also be interesting especially for future observational data. Another smoking-gun of the work in this paper is that we have chosen the gauge \(\beta =0\) so that the tetrad (17) is made diagonal. However, since one has freedom to choose other gauges, which may make the tetrad non-diagonal, whether the conclusion will be affected is still unknown. We leave all these topics for upcoming works.
Data Availability Statement
This manuscript has no associated data or the data will not be deposited. [Authors’ comment: This is a theoretical study and no experimental data has been listed.]
Notes
We thank the anonymous referee for pointing this to us.
References
A.A. Starobinsky, Phys. Lett. B 91, 99 (1980)
A.H. Guth, Phys. Rev. D 23, 347 (1981)
A.D. Linde, Phys. Lett. B 108, 389 (1982)
Y. Akrami et al. [Planck Collaboration], arXiv:1807.06211 [astro-ph.CO]
S.W. Hawking, R. Penrose, Proc. Roy. Soc. Lond. A 314, 529 (1970)
S.W. Hawking, G.F.R. Ellis, Cambridge University Press, Cambridge (1973)
A. Borde, A. Vilenkin, Phys. Rev. Lett. 72, 3305 (1994). arXiv:gr-qc/9312022
M. Novello, S.E.P. Bergliaffa, Phys. Rept. 463, 127 (2008). arXiv:0802.1634 [astro-ph]
Y.-S. Piao, B. Feng, X.-M. Zhang, Phys. Rev. D 69, 103520 (2004). arXiv:hep-th/0310206
Y.-S. Piao, Phys. Rev. D 71, 087301 (2005). arXiv:astro-ph/0502343
Y.-S. Piao, S. Tsujikawa, X.-M. Zhang, Class. Quant. Grav. 21, 4455 (2004). arXiv:hep-th/0312139
Y.-F. Cai, T. Qiu, Y.-S. Piao, M. Li, X. Zhang, JHEP 0710, 071 (2007). arXiv:0704.1090 [gr-qc]
Y.-F. Cai, T. Qiu, R. Brandenberger, Y.-S. Piao, X. Zhang, JCAP 0803, 013 (2008). arXiv:0711.2187 [hep-th]
Y.-F. Cai, T.-T. Qiu, J.-Q. Xia, X. Zhang, Phys. Rev. D 79, 021303 (2009). arXiv:0808.0819 [astro-ph]
Y.-F. Cai, T.-T. Qiu, R. Brandenberger, X.-M. Zhang, Phys. Rev. D 80, 023511 (2009). arXiv:0810.4677 [hep-th]
T. Qiu, J. Evslin, Y.-F. Cai, M. Li, X. Zhang, JCAP 1110, 036 (2011). arXiv:1108.0593 [hep-th]
D.A. Easson, I. Sawicki, A. Vikman, JCAP 1111, 021 (2011). arXiv:1109.1047 [hep-th]
Y.-F. Cai, D.A. Easson, R. Brandenberger, JCAP 1208, 020 (2012). arXiv:1206.2382 [hep-th]
T. Qiu, X. Gao, E.N. Saridakis, Phys. Rev. D 88(4), 043525 (2013). arXiv:1303.2372 [astro-ph.CO]
T. Qiu, Y.T. Wang, JHEP 1504, 130 (2015). arXiv:1501.03568 [astro-ph.CO]
T. Qiu, K.-C. Yang, JCAP 1011, 012 (2010). arXiv:1007.2571 [astro-ph.CO]
T. Qiu, Class. Quant. Grav. 27, 215013 (2010). arXiv:1007.2929 [hep-ph]
S. Carloni, P.K.S. Dunsby, D.M. Solomons, Class. Quant. Grav. 23, 1913 (2006). arXiv:gr-qc/0510130
Y.F. Cai, S.H. Chen, J.B. Dent, S. Dutta, E.N. Saridakis, Class. Quant. Grav. 28, 215011 (2011). arXiv:1104.4349 [astro-ph.CO]
M. Hohmann, L. Jarv, U. Ualikhanova, Phys. Rev. D 96(4), 043508 (2017). arXiv:1706.02376 [gr-qc]
G. Date, G.M. Hossain, Phys. Rev. Lett. 94, 011302 (2005). arXiv:gr-qc/0407074
M. Libanov, S. Mironov, V. Rubakov, JCAP 1608(08), 037 (2016). arXiv:1605.05992 [hep-th]
T. Kobayashi, Phys. Rev. D 94(4), 043511 (2016). arXiv:1606.05831 [hep-th]
A. Ijjas, P.J. Steinhardt, Phys. Rev. Lett. 117(12), 121304 (2016). arXiv:1606.08880 [gr-qc]
D.A. Dobre, A.V. Frolov, J.T.G. Ghersi, S. Ramazanov, A. Vikman, JCAP 1803, 020 (2018). arXiv:1712.10272 [gr-qc]
Y. Cai, Y. Wan, H.G. Li, T. Qiu, Y.S. Piao, JHEP 1701, 090 (2017). arXiv:1610.03400 [gr-qc]
P. Creminelli, D. Pirtskhalava, L. Santoni, E. Trincherini, JCAP 1611(11), 047 (2016). arXiv:1610.04207 [hep-th]
Y. Cai, H.G. Li, T. Qiu, Y.S. Piao, Eur. Phys. J. C 77(6), 369 (2017). arXiv:1701.04330 [gr-qc]
Y. Cai, Y.S. Piao, JHEP 1709, 027 (2017). arXiv:1705.03401 [gr-qc]
F.W. Hehl, P. Von Der Heyde, G.D. Kerlick, J.M. Nester, Rev. Mod. Phys. 48, 393 (1976)
Y.F. Cai, S. Capozziello, M. De Laurentis, E.N. Saridakis, Rept. Prog. Phys. 79(10), 106901 (2016). arXiv:1511.07586 [gr-qc]
R. Aldrovandi, J.G. Pereira, Fundam. Theor. Phys. 173, (2013)
S.H. Chen, J.B. Dent, S. Dutta, E.N. Saridakis, Phys. Rev. D 83, 023508 (2011). arXiv:1008.1250 [astro-ph.CO]
Y.P. Wu, C.Q. Geng, Phys. Rev. D 86, 104058 (2012). arXiv:1110.3099 [gr-qc]
Y.P. Wu, Phys. Lett. B 762, 157 (2016). arXiv:1609.04959 [gr-qc]
H. Abedi, S. Capozziello, R. D’Agostino, O. Luongo, Phys. Rev. D 97(8), 084008 (2018). arXiv:1803.07171 [gr-qc]
A. Golovnev, T. Koivisto, JCAP 1811(11), 012 (2018). arXiv:1808.05565 [gr-qc]
R. Aldrovandi, J.G. Pereira, Singapore (World Scientific, Singapore, 1995), p. 699
K. Bamba, G.G.L. Nashed, W. El Hanafy, S.K. Ibraheem, Phys. Rev. D 94(8), 083513 (2016). arXiv:1604.07604 [gr-qc]
S. Nojiri, S.D. Odintsov, V.K. Oikonomou, Phys. Rept. 692, 1 (2017). arXiv:1705.11098 [gr-qc]
K. Izumi, Y.C. Ong, JCAP 1306, 029 (2013). arXiv:1212.5774 [gr-qc]
C. Li, Y. Cai, Y.F. Cai, E.N. Saridakis, JCAP 1810(10), 001 (2018). arXiv:1803.09818 [gr-qc]
A.A. Starobinsky, Sov. Astron. Lett. 7, 36 (1981)
T. Qiu, Phys. Rev. D 93(12), 123515 (2016). arXiv:1512.02887 [hep-th]
J. Chen, W. Hou, D. Hou, T. Qiu, Chin. Phys. C 42(4), 045102 (2018). arXiv:1711.06580 [astro-ph.CO]
A.A. Starobinsky, JETP Lett. 55, 489 (1992)
Z.G. Liu, J. Zhang, Y.S. Piao, Phys. Lett. B 697, 407 (2011). arXiv:1012.0673 [gr-qc]
J. Liu, Y.S. Piao, Phys. Lett. B 705, 1 (2011). arXiv:1106.5608 [hep-th]
A.R. Liddle, R.J. Scherrer, Phys. Rev. D 59, 023509 (1999). arXiv:astro-ph/9809272
M. Krššák, E.N. Saridakis, Class. Quant. Grav. 33(11), 115009 (2016). arXiv:1510.08432 [gr-qc]
M. Hohmann, L. Jrv, U. Ualikhanova, Phys. Rev. D 97(10), 104011 (2018). arXiv:1801.05786 [gr-qc]
S. Farnsworth, J.L. Lehners, T. Qiu, Phys. Rev. D 96(8), 083530 (2017). arXiv:1709.03171 [gr-qc]
Acknowledgements
We thank Yi-Fu Cai, Jun Chen, Wenjie Hou, Keisuke Izumi, Ze Luan, Jiaming Shi, Taishi Katsuragawa, Emmanuel N. Saridakis and Yun-Long Zheng for useful discussions. This work is supported by NSFC under Grant nos. 11405069 and 11653002.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
Funded by SCOAP3.
About this article

Cite this article
Qiu, T., Tian, K. & Bu, S. Perturbations of bounce inflation scenario from f(T) modified gravity revisited. Eur. Phys. J. C 79, 261 (2019). https://doi.org/10.1140/epjc/s10052-019-6782-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjc/s10052-019-6782-8