
Abstract
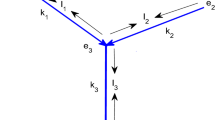
Models for population dynamics in rivers and streams have highlighted the importance of spatial and temporal variations for population persistence. We present a novel model that considers the longitudinal variation as introduced by the sinuosity of a meandering river where a main channel is laterally extended to point bars in bends. These regions offer different habitat conditions for aquatic populations and therefore may enhance population persistence. Our model is a nonstandard reaction–advection–diffusion model where the domain of definition consists of the real line (representing the main channel) with periodically added intervals (representing the point bars). We give an existence and uniqueness proof for solutions of the equations. We then study population persistence as the (in-) stability of the trivial solution and population spread as the minimal wave speed of traveling periodic waves. We conduct a sensitivity analysis to highlight the importance of each parameter on the model outcome. We find that sinuosity can enhance species persistence.


Similar content being viewed by others

References
Anholt BR (1995) Density dependence resolves the stream drift paradox. Ecology 76:2235–2239
Ballyk M, Dung L, Jones DA, Smith H (1998) Effects of random motility on microbial growth and competition in a flow reactor. SIAM J Appl Math 59(2):573–596
Bencala KE, Walters RA (1983) Simulation of solute transport in a mountain pool-and-riffle stream: a transient storage model. Water Resour Res 19(3):718–724
Boldin B (2007) Persistence and spread of gastro-intestinal infections: the case of enterotoxigenic escherichia coli in piglets. Bull Math Biol 70(7):2077–2101
Byers JE, Pringle JM (2006) Going against the flow: retention, range limits and invasions in advective environments. Mar Ecol Prog Ser 313:27–41
Constantin P, Foias C (1988) Navier–Stokes equations. Chicago Lectures in Mathematics. University of Chicago Press, Chicago
Dey S (2014) Fluvial hydrodynamics: hydrodynamic and sediment transport phenomena. GeoPlanet: earth and planetary sciences. Springer-Verlag Berlin Heidelberg
Foias C, Manley O, Rosa R, Temam R (2001) Navier–Stokes equations and turbulence. Encyclopedia of mathematics and its applications. Cambridge University Press, Cambridge
Hershey AE, Pastor J, Peterson BJ, Kling GW (1993) Stable isotopes resolve the drift paradox for baetis mayflies in an arctic river. Ecology 74:2315–2325
Jin Y, Lewis MA (2011) Seasonal influence on population spread and persistence in streams: critical domain size. SIAM J Appl Math 71:1241–1262
Jin Y, Hilker FM, Steffler PM, Lewis MA (2014) Seasonal invasion dynamics in a spatially heterogeneous river with fluctuating flows. Bull Math Biol 76(7):1522–1565
Kolpas A, Nisbet RM (2010) Effects of demographic stochasticity on population persistence in advective media. Bull Math Biol 72(5):1254–1270
Lam K-Y, Lou Y, Lutscher F (2016) The emergence of range limits in advective environments. SIAM J Appl Math 76(2):641–662
Larios A, Pei Y (2016) On the local well-posedness and a Prodi–Serrin type regularity criterion of the three-dimensional mhd-boussinesq system without thermal diffusion. arXiv:1609.06002
Lou Y, Lutscher F (2014) Evolution of dispersal in open advective environments. J Math Biol 69(6–7):1319–1342
Lutscher F, Seo G (2011) The effect of temporal variability on persistence conditions in rivers. J Theor Biol 283:53–59
Lutscher F, Pachepsky E, Lewis MA (2005) The effect of dispersal patterns on stream populations. SIAM Rev 47(4):749–772
Lutscher F, Lewis MA, McCauley E (2006) The effects of heterogeneity on population persistence and invasion in rivers. Bull Math Biol 68(8):2129–2160
Lutscher F, McCauley E, Lewis MA (2007) Spatial patterns and coexistence mechanisms in rivers. Theor Popul Biol 71(3):267–277
Lutscher F, Nisbet R, Pachepsky E (2010) Population persistence in the face of advection. Theor Ecol 3:271–284
Müller K (1954) Investigations on the organic drift in north Swedish streams. Technical report 34, Institute of Freshwater Research, Drottningholm
Müller K (1982) The colonization cycle of freshwater insects. Oecologica 53:202–207
Pachepsky E, Lutscher F, Nisbet R, Lewis MA (2005) Persistence, spread and the drift paradox. Theor Popul Biol 67:61–73
Pasour VB, Ellner SP (2010) Computational and analytic perspectives on the drift paradox. SIAM J Appl Dyn Syst 9:333–356
Pringle JM, Lutscher F, Glick E (2009) Going against the flow: the effect of non-Gaussian dispersal kernels and reproduction over multiple generations. Mar Ecol Prog Ser 337:13–17
Ramirez JM (2012) Population persistence under advection–diffusion in river networks. J Math Biol 65(5):919–942
Samia Y, Lutscher F (2012) Persistence probabilities for stream populations. Bull Math Biol 74:1629–1650
Sarhad J, Carlson R, Anderson K (2014) Population persistence in river networks. J Math Biol 69:401–448
Seo G, Lutscher F (2011) Spread rates under temporal variability: calculation and application to biological invasions. Math Models Methods Appl Sci 21:2469–2489
Shigesada N, Kawasaki K, Teramoto E (1986) Traveling periodic waves in heterogeneous environments. Theor Popul Biol 30:143–160
Speirs DC, Gurney WSC (2001) Population persistence in rivers and estuaries. Ecology 82(5):1219–1237
Temam R (2001) Navier–Stokes equations, theory and numerical analysis. AMS Chelsea Publishing, Providence Reprint of the 1984 edition
Vasilyeva O, Lutscher F, Lewis MA (2016) Analysis of spread and persistence for stream insects with winged adult stages. J Math Biol 72(4):851–875
Weinberger HF (1982) Long-time behavior of a class of biological models. SIAM J Math Anal 13:353–396
Weinberger HF (2002) On spreading speeds and traveling waves for growth and migration models in a periodic habitat. J Math Biol 45:511–548
Acknowledgements
YJ gratefully acknowledges an AMS-Simons Travel grant and NSF Grant DMS 1411703. FL is grateful for an NSERC Discovery Grant RGPIN-2016-04795.
Author information
Authors and Affiliations
Corresponding author
Appendix A: Existence and Uniqueness of Solutions
Appendix A: Existence and Uniqueness of Solutions
In this appendix, we prove the existence and uniqueness of model (6) over a bounded periodic domain [0, nL] under the interface conditions (7) and (9), hostile upstream boundary condition and free-flow downstream boundary condition, i.e.,
Without loss of generality, we provide the proof over a two-period domain \(\Omega =[0,2L] = \Omega _1 \cup \Omega _2\), where \(\Omega _1 = [0, L_1] \cup [L, L+L_1]\) and \(\Omega _2 = [L_1, L] \cup [L+L_1, 2L]\).
We briefly summarize the key steps of the Galerkin approximation and energy method that we use for the proof. A detailed process can be found in Larios and Pei (2016) and references therein.
Given a PDE system
for some smooth function \(\mathcal {F}\), we consider a sequence of approximated systems
for \(m = 1, 2, \dots \) after formally applying certain projections \(P_{\sigma }^{(m)}\) onto a finite-dimensional subspace of the domain of the differential operator in the equation. Then, we take the inner product of the projected system with the eigenfunctions \(\{\psi _{i}(x)\}_{i=1}^{m}\) of the differential operator, which is positive-definitive, self-adjoint, and compact, and obtain a sequence of ordinary differential equations (ODE). Each of the ODE system has a unique solution \(\{\alpha (t)\}_{i=1}^{M}\) from which we obtain \(P_{\sigma }^{(m)}u(x, t) = \sum _{i=1}^{m}\alpha _{i}(t)\psi _{i}(x)\) for \(m = 1, 2, \dots \).
Then, we obtain the energy estimates for \(P_{\sigma }^{(m)}u(x, t)\) in some Banach space Y, say, \(Y = L^2(\Omega )\), as well as the boundedness of those solutions in some space X, say, \(X = H^1(\Omega )\), which is compactly embedded in Y. Hence, we can extract a convergent subsequence of the above solutions as a sequence in Y, provided that the time derivative of the aforementioned sequence also remains bounded in Z, say, the dual space of X, and Y is continuously embedded in Z. The limit of the above convergent subsequence indeed satisfies the original PDE.
A critical result for the process to work is the Aubin–Lions Compactness Lemma below [see remarks after Lemma 8.2 in Chapter Eight of Constantin and Foias (1988) as well as Lemma 2.1 in Sect. 2, Chapter 3 of Temam (2001)].
Lemma A.1
Let \(T>0\), fix some \(p \in (1, \infty ),\) and let \(\{f_{n}(\cdot , t)\}_{n=1}^{\infty }\) be a bounded sequence of functions in \(L_{t}^{p}(Y;[0, T]),\) where Y is a Banach space. If \(\{f_{n}\}_{n=1}^{\infty }\) is also bounded in \(L_{t}^{p}(X;[0, T])\), where X is compactly imbedded in Y, and \(\{\partial f_{n}/\partial t\}_{n=1}^{\infty }\) is uniformly bounded in \(L_{t}^{p}(Z;[0, T]),\) where Y is continuously imbedded in Z, then \(\{f_{n}\}_{n=1}^{\infty }\) is relatively compact in \(L_{t}^{p}(Y;[0, T])\).
For simplicity, we provide only the key a priori energy estimates under the interface conditions that lead to the boundedness results required in this lemma. We omit the details for constructing solutions via the standard Galerkin approximation; see Constantin and Foias (1988), Temam (2001).
Throughout this section, we use \(L^2\) and \(H^{k} = W^{k,2}=\{u\in L^2: D^\alpha u\in L^2, \forall \alpha \text{ with } |\alpha |\le k\}\), \(k=1, 2\), to denote Lebesgue and Sobolev spaces, respectively, while we denote by \(C_{0}^{\infty }\) the space of compactly supported smooth functions in space and time.
First, we give the definition of weak solutions to (6).
Definition A.1
Let \(T>0\) and suppose that \(u_0, w_0 \in L^2\) with \(u_0\ge 0\) and \(w_0\ge 0\). We say that the pair (u, w) is a weak solution to (6), if \(u, w \in L^{\infty }(L^2;[0, T]) \cap L^{2}(H^1;[0, T])\). Furthermore, for test functions \(\phi ^{(1)} \in C_{0}^{\infty }([0, L_1] \times [0, T])\), \(\phi ^{(2)} \in C_{0}^{\infty }([L, L+L_1] \times [0, T])\), and \(\psi ^{(1)} \in C_{0}^{\infty }( [L_1, L]\times [0, T])\), \(\psi ^{(2)} \in C_{0}^{\infty }([L+L_1, 2L] \times [0, T])\), (6) holds in the weak sense, i.e., we have
In the following proof of the well-posedness of system (6), for the sake of simplicity, we provide only the a priori \(L^2\)-energy and \(H^1\)-enstrophy estimates. We denote \(u(\cdot ) = u(\cdot , t)\) and similarly for the derivatives of u in space and time.
Proof of Theorem 2.1
Step 1: \(L^2\) -estimates Multiply the three equations in (6) by \(A_1u\), \(A_{w}w\), and \(A_2 u\), respectively, integrate by parts over \(\Omega _1\) and \(\Omega _2\) accordingly, and add, so we obtain
where \(\mathbf{(B_1)}\) on the left side of the equation represents the boundary terms, which from integration by parts can be written as
by using the interface conditions (9).
In order to estimate the three parts I, II, and III on the right side of (52), we first notice that due to the hydrological condition (1) and integration by parts, we have
Therefore, by the boundary conditions (50), we have
Next, by denoting \(A = \max \{A_1, A_2, A_{w}\}\) and \(\alpha = \max \{\alpha _{u}, \alpha _{w}\}\), we estimate II as
where we used Cauchy–Schwarz inequality. Regarding the remaining integrals, we use the assumption that \(f_1, f_2, g \in L^{\infty }(\Omega )\) and proceed as
Thus, by denoting
all the above estimates imply that
where for \(j=1,2\), the constant C depends on \(A_{j}\), \(A_{w}\), \(\alpha _{u}\), \(\alpha _{w}\), and \(\Vert f_{j}\Vert _{L^{\infty }(\Omega )}\), \(\Vert g\Vert _{L^{\infty }(\Omega )}\). Hence, we conclude that \(u, w \in L^{\infty }(L^2;[0, T]) \cap L^{2}(H^1;[0, T])\).
Step 2: Uniqueness Suppose there are two solutions to the system (6), say, \((u^{(1)}, w^{(1)})\) and \((u^{(2)}, w^{(2)})\), possessing the same initial data and satisfying the identical hostile boundary and interior interface conditions. We denote the difference \(\tilde{u} = u^{(1)} - u^{(2)}\) and \(\tilde{w} = w^{(1)} - w^{(2)}\) and subtract the systems satisfied by the two solutions. Then, we perform the same energy estimates to the system for \((\tilde{u}, \tilde{w})\) as in Step 1, and obtain
where we assumed that \(f_1\), \(f_2\), and g are Lipschitz continuous. Hence, the uniqueness of the above solution follows from Grönwall’s inequality applied to the analogues of (57) with the initial value \(\tilde{u}_0 = \tilde{w}_0 = 0\). For simplicity, we skip the details here.
Step 3: Higher regularity (\(H^1\)-estimates) Assume \(u_0, w_0 \in H^1\) with \(u_0\ge 0\) and \(w_0\ge 0\) and \(T>0\). We prove a priori that the solution (u, w) is actually regular on \(\Omega \times [0, T]\). Multiply (6) by \(-A_1D_1u_{xx}\), \(-A_{w}D_{w}w_{xx}\), and \(-A_2D_2u_{xx}\), respectively, integrate by parts over \(\Omega _1\) and \(\Omega _2\) accordingly, and add, so that we have
where \(\mathbf{(B_2)}\) represents the boundary terms from the left side of (58), which by the interface conditions, add up to 0, i.e.,
where we used the condition \(u_{t}=w_{t}\) at \(x=0, L, L_1\), and \(L+L_1\), and boundary conditions (50). In order to estimate IV, we use Cauchy–Schwarz inequality and proceed as
where for \(j=1, 2\), the constant \(C_1\) depends on \(A_{j}\), \(v_{j}\), and \(A_{w}\), \(v_{w}\). Next, we integrate by parts and bound V as
where we used Cauchy–Schwarz inequality. Here the constant \(C_2\) depends on all parameters including \(D_1\), \(D_2\) and \(D_{w}\). Note that the boundary terms from the above integration by parts add up to 0 due to the continuity condition (7). Regarding VI, we first apply Hölder’s inequality and get
where we also used Cauchy–Schwarz and Poincaré’s inequality in the last step. The constant \(C_3\) in the above estimates depends on \(A_{j}\), \(A_{w}\), L, \(L_{1}\), and \(\Vert f_{j}\Vert _{L^{\infty }(\Omega _{j})}\), \(\Vert g\Vert _{L^{\infty }(\Omega _1)}\), for \(j=1, 2\). Summing up all the above estimates, and denoting
we get
where C depends on \(A_{j}\), \(v_{j}\), \(\alpha _{u}\), \(\alpha _{w}\), and \(A_{w}\), \(v_{w}\), for \(j=1, 2\). Thus, Grönwall’s inequality implies that \(u, w \in L^{\infty }( H^1;[0, T]) \cap L^{2}(H^2;[0, T] )\). Hence, the proof is complete. \(\square \)
Remark A.1
From the above \(L^2\) and \(H^1\) estimates, we see that the time derivatives \(\frac{\mathrm{d}u}{\mathrm{d}t}\) and \(\frac{\mathrm{d}w}{\mathrm{d}t}\) are also uniformly bounded. Therefore, we obtain that u and w are in fact weakly continuous in time. Namely, \(u, w \in C_{w}(H^1;[0, T])\) for all \(T>0\), where the space \(C_{w} \subset L^{\infty }\) here consists of all functions that are weakly continuous in time with values in \(H^1\). In particular, the initial conditions are satisfied in the weak sense, i.e.,
for \(i=1, 2\) and any test function \(\xi \) being \(\phi \) or \(\psi \). Moreover, by standard arguments, e.g., Constantin and Foias (1988), Foias et al. (2001), we have that the solution is actually analytic in time.
Remark A.2
In view of Sobolev embedding \(H^1 \hookrightarrow L^{\infty }\) in one-dimensional space, we conclude that u and w are in fact uniformly bounded for all time.
Remark A.3
Now with the \(H^1\) estimates available, we can repeat the above arguments but testing the system by \(\Delta ^2 u\) and \(\Delta ^2 w\) over \(\Omega _{j}\), \(j=1, 2\), and obtain the \(H^2\) boundedness of the solution (see e.g., Larios and Pei 2016). Similarly, we have that the solution is in fact smooth. For simplicity, we omit the details here.\(\square \)
Rights and permissions
About this article

Cite this article
Jin, Y., Lutscher, F. & Pei, Y. Meandering Rivers: How Important is Lateral Variability for Species Persistence?. Bull Math Biol 79, 2954–2985 (2017). https://doi.org/10.1007/s11538-017-0358-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11538-017-0358-2