
Abstract
This study is keyed to enhancing our ability to characterize naturally fractured reservoirs through quantification of uncertainties associated with fracture permeability estimation. These uncertainties underpin the accurate design of well drilling completion in heterogeneous fractured systems. We rely on monitored temporal evolution of drilling mud losses to propose a non-invasive and quite inexpensive method to provide estimates of fracture aperture and fracture mud invasion together with the associated uncertainty. Drilling mud is modeled as a yield power law fluid, open fractures being treated as horizontal planes intersecting perpendicularly the wellbore. Quantities such as drilling fluid rheological properties, flow rates, pore and dynamic drilling fluid pressure, or wellbore geometry, are often measured and available for modeling purposes. Due to uncertainty associated with measurement accuracy and the marked space–time variability of the investigated phenomena, we ground our study within a stochastic framework. We discuss (a) advantages and drawbacks of diverse stochastic calibration strategies and (b) the way the posterior probability densities (conditional on data) of model parameters are affected by the choice of the inverse modeling approach employed. We propose to assist stochastic model calibration through results of a moment-based global sensitivity analysis (GSA). The latter enables us to investigate the way parameter uncertainty influences key statistical moments of model outputs and can contribute to alleviate computational costs. Our results suggest that combining moment-based GSA with stochastic model calibration can lead to significant improvements of fractured reservoir characterization and uncertainty quantification.












Similar content being viewed by others


References
Al-Adwani T, Singh S, Khan B, Dashti J, Ferroni G, Martocchia A (2012) Real time advanced surface flow analysis for detection of open fractures. In: EAGE annual conference & exhibition incorporating SPE Europec. https://doi.org/10.2118/154927-MS
Alcolea A, Carrera J, Medina A (2006) Pilot points method incorporating prior information for solving the groundwater flow inverse problem. Adv Water Resour 29:1678–1689. https://doi.org/10.1016/j.advwatres.2005.12.009
ANSYS Inc. (2009) ANSYS® FLUENT® User’s guide, Rel. 12.1
Campolongo F, Cariboni J, Saltelli A (2007) An effective screening design for sensitivity analysis of large models. Environ Model Softw 22:1509–1518. https://doi.org/10.1016/j.envsoft.2006.10.004
Carrera J, Neuman SP (1986) Estimation of aquifer parameters under transient and steady state conditions: 2. Uniqueness, stability, and solution algorithms. Water Resour Res 22(2):211–227. https://doi.org/10.1029/WR022i002p00211
Carrera J, Alcolea A, Medina A, Hidalgo J, Slooten LJ (2005) Inverse problem in hydrogeology. Hydrogeol J 13(1):206–222. https://doi.org/10.1007/s10040-004-0404-7
Chen M, Izady A, Abdalla OA, Amerjeed M (2018) A surrogate-based sensitivity quantification and Bayesian inversion of a regional groundwater flow model. J Hydrol 557:826–837. https://doi.org/10.1016/j.jhydrol.2017.12.071
Dell’Oca A, Riva M, Guadagnini A (2017) Moment-based metrics for global sensitivity analysis of hydrological systems. Hydrol Earth Syst Sci 21:1–16. https://doi.org/10.5194/hess-21-6219-2017
API Draft (2009) Rheology and hydraulics of oil-well draft. In API recommended practice 13D Draft, p 16
Faysal A, Shahriar M, Sheikh ZI (2019) Computational fluid dynamics study of yield power law drilling fluid flow through smooth-walled fractures. J Pet Explor Prod Technol. https://doi.org/10.1007/s13202-019-0646-5
Galvis Barros NE (2018) Geomechanics, fluid dynamics and well testing, applied to naturally fractured carbonate reservoirs, extreme naturally fractured reservoirs. Springer theses. Springer, New York. https://doi.org/10.1007/978-3-319-77501-2
Keller JB (1976) Inverse problems. Am Math Mon 83:107–118
Kennedy J, Eberhart R (1995) Particle swarm optimization. In: Proceedings of the IEEE international conference on neural networks, vol 4, pp 1942–1948. http://dx.doi.org/10.1109/ICNN.1995.488968
Kullback S (1959) Information theory and statistics. Wiley, New York
Lagarias JC, Reeds JA, Wright MH, Wright PE (1998) Convergence properties of the Nelder–Mead simplex method in low dimensions. SIAM J Optim 9(1):112–147. https://doi.org/10.1137/S1052623496303470
Laloy E, Rogiers B, Vrugt JA, Mallants D, Jacques D (2013) Efficient posterior exploration of a high-dimensional groundwater model from two-stage Markov chain Monte Carlo simulation and polynomial chaos expansion. Water Resour Res 49:2664–2682. https://doi.org/10.1002/wrcr.20226
Lavrov A (2014) Radial flow of non-Newtonian power-law fluid in a rough-walled fracture: effect of fluid rheology. Transp Porous Med 105(3):559–570. https://doi.org/10.1007/s11242-014-0384-6
Majidi R, Miska SZ (2011) Fingerprint of mud losses into natural or induced fractures. SPE 143854 SPE European formation damage conference held in Noordwijk, The Netherlands, 7–10 June 2011
Majidi R, Miska SZ, Ahmed R, Yu M, Thompson LG (2010) Radial flow of yield-power-law fluids: numerical analysis, experimental study and the application for drilling fluid losses in fractured formations. J Pet Sci Eng 70(3):334–343. https://doi.org/10.1016/j.petrol.2009.12.005
Mara TA, Fajraoui N, Guadagnini A, Younes A (2017) Dimensionality reduction for efficient Bayesian estimation of groundwater flow in strongly heterogeneous aquifers. Stoch Environ Res Risk Assess 31:2313–2326. https://doi.org/10.1007/s00477-016-1344-1
Medina A, Carrera J (1996) Coupled estimation of flow and solute transport parameters. Water Resour Res 32(10):3063–3076. https://doi.org/10.1029/96wr00754
Mitsoulis E, Abdali SS (1993) Flow Simulation of Herschel–Bulkley fluids through extrusion dies. Can J Chem Eng 71:147–160. https://doi.org/10.1002/cjce.5450710120
Neuman SP (1973) Calibration of groundwater flow models viewed as a multiple-objective decision process under uncertainty. Water Resour Res 9(4):1006–1021. https://doi.org/10.1029/WR009i004p01006
Pianosi F, Beven K, Freer J, Hall JW, Rougier J, Stephenson DB, Wagener T (2016) Sensitivity analysis of environmental models: a systematic review with practical workflow. Environ Model Softw 79:214–232. https://doi.org/10.1016/j.envsoft.2016.02.008
Rahmat-Samii Y, Michielsen E (1999) Electromagnetic optimization by genetic algorithms. Wiley, New York
Ratto M, Tarantola S, Saltelli A (2001) Sensitivity analysis in model calibration: GSA-GLUE approach. Comput Phys Commun 136:212–224. https://doi.org/10.1016/S0010-4655(01)00159-X
Razavi S, Gupta HV (2015) What do we mean by sensitivity analysis? The need for comprehensive characterization of ‘‘global’’ sensitivity in Earth and Environmental systems models. Water Resour Res 51:3070–3092. https://doi.org/10.1002/2014WR016527
Razavi O, Lee HP, Olson JE, Schultz RA (2017) Drilling mud loss in naturally fractured reservoirs: theoretical modelling and field data analysis. SPE-187265-MS. https://doi.org/10.2118/187265-MS
Rehm B, Haghshenas A, Paknejad AS, Al-Yami A, Hughes J, Shubert J (2012) Underbalanced drilling: Limits and extremes. Gulf Publishing Company, Houston
Robinson J, Rahmat-Samii Y (2004) particle swarm optimization in electromagnetics. IEEE Trans Antennas Propag 52(2):397–407. https://doi.org/10.1109/TAP.2004.823969
Roehl P, Choquette P (1985) Carbonate petroleum reservoir. Springer, New York
Russo E, Colombo I, Nicolotti I (2018) Uncertainty quantification of fracture characterization in naturally fractured reservoirs. Presented at FRONTUQ18 Pavia, Italy
Saltelli A, Ratto M, Andres T, Campolongo F, Cariboni J, Gatelli D (2008) Global sensitivity analysis: the primer. Wiley, Chichester
Sobol IM (1993) Global sensitivity indices for nonlinear mathematical models and their Monte Carlo estimates. Math Comput Simul 55:271–280. https://doi.org/10.1016/S0378-4754(00)00270-6
Sochala P, Le Maître OP (2013) Polynomial chaos expansion for subsurface flows with uncertain soil parameters. Adv Water Resour 62:139–154. https://doi.org/10.1016/j.advwatres.2013.10.003
Song X, Zhang J, Zhan C, Xuan Y, Ye M, Xu C (2015) Global sensitivity analysis in hydrological modeling: review of concepts, methods, theoretical framework, and applications. J Hydrol 523:739–757. https://doi.org/10.1016/j.jhydrol.2015.02.013
Sudret B, Marelli S, Wiart J (2017) Surrogate models for uncertainty quantification: an overview. In: 11th European conference on antennas and propagation (EUCAP), Paris, pp 793-797. https://doi.org/10.23919/eucap.2017.7928679
Tang J, Zhuang Q (2009) A global sensitivity analysis and Bayesian inference framework for improving the parameter estimation and prediction of a process-based Terrestrial Ecosystem Model. J Geophys Res 114:D15303. https://doi.org/10.1029/2009JD011724
Van Griensven A, Meixner T, Grunwald S, Bishop T, Diluzio M, Srinivasan R (2006) A global sensitivity analysis tool for the parameters of multi-variable catchment models. J Hydrol 324:10–23. https://doi.org/10.1016/j.jhydrol.2005.09.008
World Energy Outlook (2006) International energy agency. https://www.iea.org/publications/freepublications/publication/weo2006.pdf
Zhou H, Gómez-Hernández JJ, Li L (2014) Inverse methods in hydrogeology: evolution and recent trends. Adv Water Resour 63:22–37. https://doi.org/10.1016/j.advwatres.2005.12.009
Acknowledgements
The Authors acknowledge funding from Geolog Srl (Project: Feedback between mud losses and fractures during along wellbores in fractured formations).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest in preparing this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1: Derivation of the analytical model and theoretical analysis
The momentum Eq. (1) and the strain rate tensor, \(\varvec{\bar{\gamma } }\), in cylindrical coordinates read
Considering laminar flow (i.e., \(v_{\theta } = v_{z} = 0\)), the problem is axisymmetric (i.e., \(\frac{{\partial v_{r} }}{\partial \theta } = \frac{\partial p'}{\partial \theta } = 0\)) and (17)–(18) reduce to
Substituting (20) into (19) yields
Making use of mass conservation, i.e., \(\left( {\partial \left( {rv_{r} } \right)} \right)/\partial r\) = 0, considering that the viscous term is dominant over the inertial one, i.e., \(\rho \frac{{\partial v_{r} }}{\partial t} \ll k\left[ {\frac{\partial }{\partial z}\left( {\frac{{\partial v_{r} }}{\partial z}} \right)^{m} } \right]\), noting that \(\left( {\frac{{\partial v_{r} }}{\partial r} \ll \frac{{\partial v_{r} }}{\partial z}} \right)\) and
and introducing the quantity \(p = p^{\prime} + \rho g\), (21) becomes
Note that the vertical gradient of p (1) vanishes when \(m = 1\) (i.e., for a Newtonian or Bingham plastic fluid) and (2) decreases as the distance from the pumping well, \(r\), increases. Therefore, pressure is hydrostatic when \(m = 1\) or tends to become hydrostatic (for \(m\) ≠ 1) as the distance from the well increases.
The mud flow rate, \(Q\), can be obtained by integrating (7) along the fracture aperture, resulting in
Evaluating \(Q^{m}\) from (24), expanding \(Q^{m}\) as a Taylor series in terms of \(\tau_{Y} /\left( { - \frac{w}{2}\frac{ \partial p}{\partial r}} \right)\) and retaining only the first two terms in the expansion, yields the following approximate solution for the pressure gradient:
A closed-form expression for \(\Delta p = p_{w} - p_{f}\) can be obtained by integrating (25) from the wellbore radius, \(r_{w}\) (with pressure pw), to the mud front \(r_{f}\) (with pressure \(p_{f}\)), as:
Appendix 2: Particle swarm optimization algorithm
We start by introducing the vector x of Np × N entries. The optimal choice for the number of particles Np to sample the N-dimensional parameter space (N = 5 in our example) is problem-dependent. The results included in Sect. 5 have been obtained with Np = 50, similar findings being achieved with 40 ≤ Np ≤ 80.
PSO is implemented according to the following steps:
-
1.
Step i = 0. Random selection of a number Np of points x0(j) with j = 1,…, Np within the N-dimensional parameter space together with a random value of a displacement vector v0(j).
-
2.
Displace the Np particles within the N-dimensional space as xi+1(j) =xi(j) +vi(j).
-
3.
Evaluate (16) and select the value of j = jbest (i.e., the particle) giving the minimum of (16) and set gbest=xbest = x(jbest).
-
4.
Evaluate a new displacement vi+1(j) = \(\omega\)vi(j) + c1U[xbest− xi(j)] + c2U[gbest− xi(j)] where U is a random number uniformly distributed between 0 and 1, c1 and c2 are constant coefficients and \(\omega\) is a step dependent variable (Lagarias et al. 1998). Here, we follow Rahmat-Samii and Michielssen (1999) and fix c1 = c2 = 1.495.
-
5.
Update the particle position with the displacement evaluated at step 4, evaluate (16), select the value of j = jbest (i.e., the particle) rendering the minimum of (16) and set xbest = x(jbest). If (16) evaluated with xbest is smaller than (16) evaluated with gbest, set gbest = xbest, otherwise set gbest = gbest.
-
6.
Set i = i + 1 and go to Step 2.
Steps 2–6 are repeated until the maximum number of prescribed displacements is reached. We set this quantity to 60 in our application. In order to avoid selection of a local minimum, PSO has been performed upon varying the initial condition x0, for a total of 800 iterations.
Appendix 3: Acceptance-rejection sampling
The objective of the sampling algorithm ARS is to draw random samples from the posterior pdf of a parameter set collected in vector \(\varvec{P},\)\(f_{{\varvec{P}|\varvec{V}_{m}^{*} }}\), given a vector of \(n_{t}\) observed values of \(\varvec{V}_{m}^{*}\). According to Bayes’ theorem
where \(f_{{\varvec{V}_{m}^{*} |\varvec{P}}}\) is the likelihood function and \(f_{\varvec{P}}\) is the prior pdf of P. We assume that \(f_{{\varvec{V}_{m}^{*} |\varvec{P}}}\) is multiGaussian, i.e.,
where \(\sigma_{{V_{m} }}^{{}}\) is the standard deviation of the measurement errors (which we set to \(0.01\) and 0.1, for event 3 and 4, respectively, in our application example).
ARS can be used to draw samples from \(f_{{\varvec{P}|\varvec{V}_{m}^{*} }}\) according to the following iterative procedure:
-
1.
Sample N values from a uniform distribution in the interval (0,1) to obtain normalized parameters.
-
2.
Map normalized parameters onto \(\varvec{P}\).
-
3.
Evaluate (8) to compute the temporal evolution of \(\varvec{V}_{\varvec{m}} \left( \varvec{P} \right)\).
Evaluate \(\alpha_{i}\) that is the acceptance probability of \(\varvec{P}\) as
-
4.
Draw a random value u from a uniform distribution in the interval (0,1).
-
5.
Accept current realization of \(\varvec{P}\) if \({ \ln }\left( u \right) < \ln \left( {\alpha_{i} } \right),\) otherwise reject it and return to Step 1.
Steps 1–6 are repeated until a stable \(f_{{\varvec{V}_{m}^{*} |\varvec{P}}}\) is obtained. In our application, convergence has been attained after about \(10^{6}\) iterations.
Appendix 4: Posterior probability distribution of model parameters resulting from stochastic inverse modeling
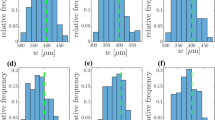
See Fig. 13.

Sample pdfs of \(\tau_{Y} /k\,\, [\text s^{{\text{-m}}}]\) (a, e), \(\Delta p/k\,\, [\text s^{{\text{-m}}}]\) (b, f), \(m\) (c, g) and \(r_{w}\,\, [\text m]\) (d, h) obtained for event a–d 3 and e–h 4 by stochastic inverse modeling implemented via NMS (black dotted curves), PSO (blue curves) and ARS (red curves). Widths of the prior support have been computed from of experimental measurements taking into account measurements errors and relative error propagations
Rights and permissions
About this article

Cite this article
Russian, A., Riva, M., Russo, E.R. et al. Stochastic inverse modeling and global sensitivity analysis to assist interpretation of drilling mud losses in fractured formations. Stoch Environ Res Risk Assess 33, 1681–1697 (2019). https://doi.org/10.1007/s00477-019-01729-4
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00477-019-01729-4