Investigation of the effects of human body stability on joint angles’ prediction A. A. Pasha ZanoosiD. NaderiK. Fallahnejad OriginalPaper 13 May 2015 Pages: 111 - 129
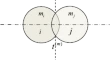
A dissipative contact force model for impact analysis in multibody dynamics Shiwu HuXinglin Guo OriginalPaper 29 April 2015 Pages: 131 - 151
A comprehensive study on the locomotion characteristics of a metameric earthworm-like robot Hongbin FangChenghao WangJian Xu OriginalPaper 23 September 2014 Pages: 153 - 177
A new modeling method for flexible multibody systems Jie ZhaoRui ZhaoKaiping Yu OriginalPaper 18 July 2014 Pages: 179 - 190
Fully analytical solution to discrete behavior of hybrid zero dynamics in limit cycle walking with constraint on impact posture Fumihiko Asano OriginalPaper 15 January 2015 Pages: 191 - 213