
Abstract
Background
Acoustic telemetry is widely used as a method for high resolution monitoring of aquatic animal movement to investigate relationships between individual animals and their environment. In shallow freshwater ecosystem, aquatic macrophytes are common and their presence increases habitat complexity and baffles sound propagation. These properties may be likely to affect the performance of acoustic telemetry, however, to date this issue has received little attention, when studying the ecology of movements of fishes in and around the important macrophyte habitats. Here, we conducted a range-test study in a freshwater riverine ecosystem, with mass development of the aquatic macrophyte Juncus bulbosus (L.), to assess how dense macrophytes impact detection probability, detection range, and performance of a three-dimensional receiver positioning system. Supersaturation of gas frequently occurs at the study site as a by-product of upstream hydroelectric power generation and gave a unique opportunity to investigate how total gas saturation affects the performance of acoustic telemetry. We also investigated the influence of environmental conditions (i.e., day-of-year, time of day, average water level above J. bulbosus) on detection probability together with vertical position of transmitters and location inside or outside macrophytes.
Results
The detection probability and range were generally low for transmitters in and outside J. bulbosus stands, with mean hourly detection probabilities ranging from 1.18 to 5% and detection ranges between 17.26 m ± 0.74. The interaction between total macrophyte biomass and distance to receiver reduced the detection probability and detection range substantially. Detection probability further decreased with increasing total gas saturation, and transmitters positioned near the sediment and close to the surface also had lower detection probabilities compared to receivers in the middle of the water column. Finally, the low detection probability affected position estimates, where only 23% of the detections could be positioned using the average positioning estimation method and positional accuracy and precision were low ranging from 1.48 to 164.8 m and 0 to 50.1 m, respectively.
Conclusions
Our findings demonstrate the impact of macrophytes and total gas saturation on detection probability and range of acoustic transmitters in a shallow ecosystem, where tagged fish are unlikely to be detected by receivers or positioned. These results emphasise that in situ range testing is strongly needed before determining the density and design of receiver array when performing acoustic telemetry studies in shallow ecosystems.
Similar content being viewed by others

Explore related subjects
Find the latest articles, discoveries, and news in related topics.Background
Acoustic telemetry is widely used in animal movement ecology to quantify movement of aquatic animals and elucidate their use of different habitats [10]. Studies on the performance of acoustic telemetry between different ecosystem types and habitats are limited, however [6, 11, 13, 27]. Performance of acoustic telemetry highly depends on detection efficiency, the probability of a receiver to detect an acoustic transmission, and detection range, the distance between transmitter and receiver with a successful detection at a given detection efficiency, generally 50% [13]. Understanding detection efficiency, hereafter detection probability, and detection range is essential when receiver arrays are designed as positioning systems. Positioning systems allow determination of fine-scale movements of tagged individuals as their positions can be estimated through triangulation. However, the triangulation method requires that transmitted acoustic signals are detected on a minimum of three receivers at the same time [1]. A successful application of a positioning system, therefore, depends on a receiver arrays’ detection probability and overlapping detection range of receivers [27]. The performance of acoustic receiver arrays is sometimes assumed and in situ range testing not conducted. Consequently, data on the performance of acoustic telemetry in many types of habitats and environmental conditions are lacking today.
Acoustic biotelemetry has the underlying assumption that the rate of acoustic signal attenuation is stable over space and time [6]; however, acoustic receivers performance is influenced by dynamic environmental conditions. This can potentially cause dramatic variation in detection probability and detection range of the receiver array and hence the performance of positioning systems. Physical obstruction, such as topography [3], the presence of aquatic macrophytes [8, 25, 27, 31] and air bubbles, derived from wind-generated waves [6] or gas supersaturated water, can block and refract the transmission of acoustic signals. Supersaturated water occurs when water at atmospheric pressure becomes even more pressurised under higher pressure, allowing additional gas to be dissolved in the water making it supersaturated relative to atmospheric pressure [20]. Supersaturated water are generated as a by produced for some hydropower plants [15]. Moreover, water temperature [34] and stratification layers in the water column such as thermoclines (temperature) and haloclines (salinity) can change speed and refract sound [7, 11]. Noise from natural and anthropogenic sources, such as wind-generated waves [13], biological noise [7] and anthropogenic sounds, i.e., boat traffic [7], can further temporarily reduce the detection probability and detection range. Finally, behavioural traits can affect the performance of acoustic telemetry as variation in detection probability occurs when fish shelter or refuge behind rocks or within macrophytes, hindering the transmission of acoustic signals [27, 33]. These factors all contribute to spatial and temporal variation in the performance of acoustic telemetry. This creates a strong need to perform in situ range testing prior to conducting studies in such ecosystems, in order to optimise the receiver array design to the varying conditions and consequently reveal the limitations for the following data analyses.
Performance of acoustic telemetry is poorly understood in shallow freshwater ecosystems with dense aquatic macrophytes [26, 27, 31]. Macrophytes are structurally complex and often considered as ecosystem engineers in freshwater ecosystems due to their key functions for ecosystem structure and functions [12]. The spatial distribution of many fish species is linked to macrophytes t for foraging, shelter, spawning or as nurseries [16, 28]. Shallow freshwater ecosystems with dense macrophytes are, however, under increasing anthropogenic pressure as macrophytes are often perceived a nuisance when interfering with human activities such as fishing, boating and swimming [30] and thus frequently removed. Evaluating the effects of macrophyte removal for fish communities and their movements is, therefore, a focus for many conservation and fisheries managers. This has contributed to the increasing interest in evaluating the spatial and temporal use of dense macrophyte habitats in shallow freshwater ecosystems [9, 16, 29] and using acoustic telemetry is one approach to explore relationships between individual animals and their use of macrophytes as habitat. However, shallow ecosystem with dense macrophytes pose challenges for conducting acoustic telemetry studies. Macrophytes are likely to obstruct the signal by causing a physical barrier for sound propagation together with their photosynthetic activity producing oxygen emitted as air bubbles that influence on sound propagation [5, 33]. Recently, some studies have evaluated the performance of acoustic telemetry in ecosystems with aquatic macrophytes [26, 27, 31], but no studies have yet performed in situ range testing and evaluated positioning systems in shallow ecosystems with very dense macrophytes growth, i.e., mass developments. Successful implementation of acoustic telemetry in ecosystems with high densities of macrophytes will require understanding of how macrophytes influence detection efficiency and detection range to determine the restrictions that may constrain the conclusions in such studies.
In this study, we assessed dense submerged macrophyte influence on the performance of acoustic telemetry in a shallow riverine ecosystem with extensive growth of the aquatic macrophyte Juncus bulbosus (L.). Specifically, the aim was to compare detection probability and range for transmitters within and outside macrophytes over a gradient in J. bulbosus density and distance to receivers. We also assessed how other environmental variables such as total gas saturation and water level above macrophytes influence on performance of acoustic telemetry. Finally, we evaluated how positional accuracy and position precision were influenced by dense J. bulbosus stands when using the position averaging method.
Methods
Study area
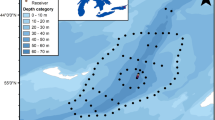
This study was conducted in the Rysstad Basin, a part of River Otra, Southern Norway (Fig. 1). The Rysstad Basin is shallow (average depth, < 5 m) and the habitat is mainly dominated by the native aquatic macrophyte species J. bulbosus that forms dense stands across the entire basin. The biomass of J. bulbosus is relatively constant throughout the year, as the plants do not senesce in autumn due to low temperature fluctuations (min: 4 °C and max:12 °C) (Schneider et al., unpublished data). A few other macrophyte species, such as Potamogeton polygonifolius (Pourr.) and Sparganium spp., have been observed in the Rysstad Basin, but their abundance < 1% of the total macrophyte biomass (Thiemer, K., unpublished data). In addition to dense plant coverage, supersaturation of dissolved gases (mainly oxygen and nitrogen) is frequently occurring as a by-product of the upstream hydropower plant at Brokke and levels have been measured as high as 172% with peak in spring and winter [21].

Map of study site and location of receivers and transmitters. Black dots represent receivers, green and red the transmitter deployments inside and outside J. bulbosus at the six locations (deployment and five relocations), respectively. Numbers indicate the relocation period
Experimental design
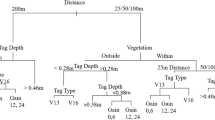
A network of 20 receivers (TBR700, Thelma Biotel, Trondheim, Norway) was installed in a section of the Rysstad Basin in May 2020 (Fig. 1). The receivers formed a triangulation grid and the distances among receivers were less than 200 m. All receivers were attached to rebar moored in place on a concrete block. The 20 receivers were deployed at depth ranging from 1.35 to 1.80 m. Eight sync tags (ART-MP-13, Thelma Biotel, output power: 153 dB re 1 uPa at 1 m) were attached to selected receivers (Fig. 1). Range testing was conducted using six transmitters (Model D-2MP7, 32 mm length, 3.7 g in air, 60–120 s transmission interval, 69 kHz, Power output: 141 dB re 1 µPa at 1 m, 0–25 m depth range (0.1 m resolution), 10.6 month battery life, Thelma Biotel, Trondheim, Norway) attached to two mobile moorings. The transmitters were placed at three heights from the substrate, 8 cm, 55 cm and 95 cm above bottom, to assess the influence of vertical position of potential fishes in the water column on detection efficiency. Transmitters are hereafter referred to as bottom, middle and top positions. It is likely that transmitters implanted internally in fish will perform differently than transmitters on the deployments, thus there is a small risk of overestimation of detection range in our study [4]. The transmitter deployments were relocated six times (approximately every second week) during the study period (May to September) (Fig. 1). The relocations of the two transmitter deployments were done so one transmitter deployment was always located outside J. bulbosus stands, whereas the other transmitter deployment was inside J. bulbosus stands. Distances between transmitter deployments and each receiver for each relocation period were calculated as Euclidean distance using GPS-points (Differential GPS, Trimble, TSC3). In Fig. 2, potential scenarios of J. bulbosus densities between transmitter deployments (inside and outside) and receivers at varying distances are illustrated.

Illustration of potential scenarios of J. bulbosus densities and distance between receivers and transmitter deployment inside or outside J. bulbosus stands
Macrophyte biovolume mapping
Submerged aquatic macrophytes biovolume (plant volume inhabited in water column) of J. bulbosus was measured five times during the study period. Plant cover (0–10%, 11–20%, 21–30%, 31–40%, 41–50%, 51–60%, 61–70%, 71–80%, 81–90%, 91–100%), average plant height (cm) and depth (cm) were measured in 130–284 quadrats randomly distributed within the study area. From this, macrophyte biovolumes (L m−2) were calculated as plant cover (%) multiplied by plant average height (dm). Density maps of predicted macrophyte biovolume were made from the point data collected at each relocation time using the calculated biovolumes and the ordinary kriging method as interpolation method (Fig. 3). Density maps of predicted water level above J. bulbosus (i.e., the difference between depth and average plant height) were likewise made for the five periods using the kriging interpolation method (Additional file 1).

J. bulbosus biovolume (L m−2) density maps of the study area at the five relocation and mapping days. Lines with dots represent unique receiver–transmitter deployment pairs (40 lines per plot)
Total gas saturation
Total gas saturation (%) was monitored every 30 min by a Total Gas Analyzer 3.0 (FischundWassertechnik with an accuracy of +—1% TGS). Total gas saturation is measured as percentage of dissolved air in the surface water. The gas logger was located approximately five km downstream the study site (Fig. 1) and as the degassing in the Rysstad Basin is slow cf. Lennox et al. [15], we, therefore, used measurements from the downstream station as a proxy for the total gas saturation in our study area. Total gas saturation averaged from 101 to 130% with values below 110% in the beginning of May and the first peak > 130% was recorded on May 27th followed by peaks in June (15th,16th and 18th) (Table 1, Fig. 4).

Relationship between total number of detections pr. day-of-year (DoY) and Total gas saturation (%)
Data preparation
Detection probability
The detection probability for each receiver and transmitter deployment was calculated as the total number of recorded detections over the number of expected detections. Expected detections were simulated ping sequences retrieved from Thelma Biotel based on the tag programming. Retrieval days were omitted from the data set to provide detection measures for uninterrupted 24 h periods from 14th May to 9th September 2020. Detection probability was then binned in hourly means. The top-transmitter on the transmitter deployment positioned within J. bulbosus was lost 24th June (103 days after deployment, experiment run in a total of 180 days) and detection probabilities were, therefore, not calculated for this transmitter for the remaining period. Finally, five receivers were temporarily on land from June 14th to June 24th, while the area underwent maintenance mowing of the macrophytes under purview of the municipality (Thiemer et al. in prep), thus probabilities for these receivers during this time were also omitted.
Environmental conditions
Total macrophyte biovolume values between the transmitter deployments and receivers were calculated for all five periods by extracting the predicted macrophyte biovolumes along a line combining the respective receivers and transmitter deployments (40 combinations for each period). The extracted biovolume values were then summed for each line to produce a proxy for Total macrophyte biovolume between each transmitter deployment and receiver pairs and were assigned to all observations within each relocation period. Regrowth of J. bulbosus within each period was considered to be negligible in the 2–3 week span between macrophyte mappings, as growth rates for J. bulbosus is slow (Schneider et al., unpublished data). Distances between transmitter deployments and receivers ranged from 4.18 to 452.13 m (Table 1) with corresponding total macrophyte biovolumes ranging from 375.7 to 39,251.9 L m−2 (Fig. 3, Table 1). Moreover, average water level above J. bulbosus was calculated using the same approach as the total macrophyte biovolume corrected by hourly water levels changes. Average water level above J. bulbosus (cm) ranged from 62.64 to 250.14 cm and was generally highest in June due to snowmelt-induced increase in discharge from the upstream catchment (see density maps in Additional file 1). Finally, the environmental variables, total macrophyte biovolume, average water level above J. bulbosus and total gas saturation (%) were then merged to the data sets (hourly and daily mean, respectively).
Statistical analyses
Influence of macrophyte biovolume and environmental conditions on detection probability
The influence of distance on detection probability of the transmitter deployment inside and outside J. bulbosus was estimated by fitting GLM models with a binomial family (logit-link) and the dose.p function from the MASS-package and was used to determine the detection range.
Relationships between mean hourly detection probability of the transmitter deployments and environmental variables were estimated by fitting Generalized Additive Mixed models (GAMMs) using the bam function in mgcv package [35]. The GAMMs were fitted using a beta regression, which is suitable for proportional data, and with distance to receiver, total macrophyte biovolume, total gas saturation, average water level above J. bulbosus, day-of-year (collinear with temperature in temperate rivers), location (inside and outside J. bulbosus) and height (bottom, middle and top) as independent variables and with tag ID and receiver ID as random intercept effects to account for the lack of independence between detections within ID and receiver, respectively. Smoothing functions were applied to the variables: distance to receiver, total macrophyte biovolume and day-of-year, as these are expected not to follow a linear response. Total gas saturation and average water level above J. bulbosus were linear variables. Hour of day was fitted using cyclic smooth to account for the cyclic nature. Day-of-year was not fitted with a cyclic smooth as the study was not conducted throughout a full year. Total macrophyte biovolume was likely to depend on distance. Therefore, two candidate models were fitted, one with the interaction of distance and Total macrophyte biovolume and one without the interaction. The two models were compared by Akaike Information Criterion (AIC). The model including the interaction between distance to receiver and total macrophyte biovolume attained more AIC support (AIC = 711.5185 model with interaction and AIC = 735.4965 model with no interaction). The final model was, therefore:
bam(Probability ~ s(Distance to receiver) + Location + Height + s(Day-of-year) + s(Hour-of-day) + Total Gas saturation + Average water level above J. bulbosus + s(Total Macrophyte Biovolume) + s(Total Macrophyte Biovolume, Distance to receiver) + s(ID, bs = "re") + s(Receiver, bs = ”re”).
Positional accuracy and Position precision
Position averaging estimates were calculated in 30 min bins following the procedure in Simpfendorper et al. [24], as the sync tag network was not powerful enough for synchronization of the receiver array, and therefore, high-resolution positioning via triangulation was not possible (Additional file 2). This method has been widely used in acoustic telemetry studies on fish movement patterns and habitat use [3]. The ability of the receiver array (i.e., Positioning system) to position a transmitter is dependent on at least three receivers detecting an acoustic transmission signal at the same time [1]. Position estimates from detections on < 3 receivers were, therefore, not included in further analysis. Hourly mean positional accuracy, indicating the bias in position estimates, was calculated as Euclidean distance between transmitter deployments measured with GPS and the estimated positions. Position precision, reflecting the variability in positional accuracy, was measured as the standard deviation of positional accuracy estimates. Generalized linear models (GLMs) were used to test the influence of the position of transmitters (location x height) on hourly accuracy and precision. The GLMs were fitted with a gamma distribution.
All statistical analyses were performed in R Studio programme for Statistical computing v. 3.6.6.4 [22] using the following packages: kriging [18], mgcv [35] and MASS [23]. Graphics were made using ggplot2 [32].
Results
Detection summary
The range testing in the Rysstad basin was completed from May to September 2020, producing a total of 375,819 detections on 16 receivers. The four receivers with no detections were all located opposite the transmitter deployments in the river. In general, the mean hourly detection probability detected over the study period was low for all transmitters, ranging from 1.18 to 5.00% with highest values for transmitters in the middle (Table 2). The positional averaging estimates contained a total of 19,304 estimates and showed the same trend as the fraction of detections (Table 2). Positional averaging estimates based on detections on more than two receivers accounted for only 23% of the total detections, indicating that many transmitter detections were not possible to include in the triangulation procedure.
Influence of environmental conditions on detection probability and detection range
Detection probability decreased with distance to receiver as expected, and the overall detection range for both transmitter deployments was 17.26 m ± 0.74 (SE) (GLM, P < 0.0001). Detection range, the distance, where detection probability is 50%, differed between the transmitters located inside and outside J. bulbosus stands (GLM, P = 0.00017, Fig. 5). Detection range for transmitters inside J. bulbosus varied between 17.46 and 23.34 m and for transmitters outside J. bulbosus 0–18.81 m, where transmitters placed in the top and middle did not have detection probabilities > 50% (Fig. 5).

Mean hourly Detection probability at varying distance between receiver and transmitters at three different heights A Transmitter deployment inside J. bulbosus and B Transmitter deployment out J. bulbosus. Red dashed line represents the distance at which 50% of the transmissions were detected
Overall, the results of the GAMM model showed that total macrophyte biovolume, distance to receiver, their interaction, total gas saturation, average water level above J. bulbosus together with position of transmitters significantly influenced detection probability. Mean hourly detection probability was influenced by the position of the transmitter (GAMM, t = 2.46, P = 0.0856). Detection probability improved when transmitters were positioned in the middle compared to the top and bottom positions (Fig. 6). Location of transmitter deployments inside or outside J. bulbosus stands did not significantly affect detection probability, but there was a tendency that detection probabilities were higher for transmitters outside J. bulbosus (GAMM, t = -1.60, P = 0.1094). Variation in mean hourly detection probability was further explained by distance to receiver, total macrophyte biovolume, their interaction, total gas saturation and average water level above J. bulbosus (GAMM, Deviance explained = 68%, R2 = 0.47, Fig. 6). Considering that acoustic signals attenuate over distance and that high biovolumes of macrophytes is also likely to obstruct acoustic signals, their interaction was expected to be an important variable for prediction of detection probability. The significant interaction between distance and total macrophyte biovolume showed that higher total macrophyte biovolumes have negative effects on detection probability with greater distances than lower total macrophyte biovolumes (F = 86.71, P < 0.001, Fig. 6). The linear effects of total gas saturation and average water above J. bulbosus were significant with a negative slope (GAMM, t = -13.05, P < 0.0001, Fig. 6) and positive slope (GAMM, t = 10.29, P < 0.001), respectively, indicating that detection probability was reduced with increasing gas levels and improved with increasing average water level above J. bulbosus. Finally, the day-of-year and hour-of-day smoothers were also significant (GAMM, F = 197, P < 0.0001, Fig. 6), with highest detection probability in the spring (cooler temperatures approx. 4–8 °C) compared to summer and a strong diurnal pattern increasing from the middle at the day to evening, maximum at approx. 6 pm (GAMM, F = 3.48, P < 0.0001, Fig. 6).

Generalized additive mixed model (GAMM) plots showing the partial effects of selected explanatory variables on the detection probability of acoustic signals. The y-axis represents the partial effect of each variable. Solid and dashed lines indicate the predictions of the model and the 95% confidence intervals, respectively. Rug plot inside each plot indicate the distribution of observations
Positional accuracy and Position precision errors
Receiver array performance was generally low when using the average positioning method (Fig. 7A) and highly affected by the location and height of transmitters. The hourly mean positional accuracy ranged from 1.48 to 164.8 m and improved for transmitters located within J. bulbosus and for transmitters positioned near the bottom (GLM, P < 0.001, Fig. 7A). Hourly mean position precision was likewise low and ranged from 0 to 50.1 m and improved for transmitters located within J. bulbosus and for transmitters positioned towards the bottom (GLM, P < 0.001, Fig. 7B).

Distributions of the mean hourly A positional accuracy (m) and B position precision (m) for the transmitters within or outside J. bulbosus stands in three heights, respectively. Horizontal lines represent the mean. No precision estimates were possible for bottom position within J. bulbosus stands
Discussion
This study demonstrates that dense macrophyte growth has a strong impact on the performance of acoustic telemetry in a shallow freshwater riverine ecosystem. Overall, the results revealed low mean hourly detection probabilities (1.18–5%) with corresponding low detection ranges (17.26 m ± 0.74). The poor detection probability and range affected the position estimates, where only 23% of the detections could be positioned using the average positioning method estimation. In addition, the positional accuracy and precision for the position estimates were likewise low ranging from 1.48 to 164.8 m and 0 to 50.1 m, respectively. This highlights the poor ability of detecting a sufficient number of acoustic signals to calculate the position of fish individuals in the Rysstad Basin, which experiences high density of J. bulbosus and periodically gas supersaturation.
The detection probability of the six ID-MP7 transmitters (141 dB, 69 kHz) in the Rysstad Basin was explained by several environmental variables. Detection probability decreased with increasing total macrophyte biovolumes and thus align with the a priori expectation and previous studies that macrophytes represent an obstacle for transmission of acoustic signals [8, 25, 27, 31]. The significant interaction between total biovolume and distance to receiver further indicates that high total biovolume in the receiver–transmitter line substantially reduced detection probability even at short distance between receiver and transmitter. Vertical position of transmitters was found to influence detection probability, where detection probability was reduced for transmitters near the top and bottom. Location of transmitters (inside or outside J. bulbosus stands), on the other hand, did not have any significant influence on detection probability, which contrasted with expectation and previous findings [27]. A likely explanation is that J. bulbosus accounted for the majority of the macrophyte biovolume in the Rysstad Basin and filled up a high proportion of the water column. The average water level above J. bulbosus between each transmitter and receiver pair, which allows better propagation of acoustic signals, was generally low irrespective of the location of the transmitter deployments. The positive relationship between detection probability and average water level above J. bulbosus represents the better sound propagation in open waters which has been highlighted in other range testing studies [7, 11]. Location and vertical position also influenced on positional accuracy, with higher positional accuracy for transmitters located inside J. bulbosus compared to outside and for transmitters close to the sediment. This contrasts with expectations and the results of the GAMM model. An apparent explanation is the that the positioning averaging method can be strongly influenced by the number of receivers that positional estimates are based on and the number of detections within the bin-time, thus the transmitters outside J. bulbosus may have been detected on more receiver and thus the averaging estimates based on larger spatial area.
Previous range testing studies performed in ecosystems with aquatic macrophytes have reported similar results as found in the current study [27, 31]. Detection range has been found to decrease up to ~ 96% from 196 m to 7.85 in a near shore riverine ecosystem with native macrophytes [31] and by 47% from 85 to 40 m in a marine ecosystem with seagrass meadows [27]. Seasonal differences in macrophyte biovolumes (i.e., growth in spring/summer and senescence in autumn) have, moreover, been reported to strongly influence detection range [31]. Seasonal variability in detection probability and range due to macrophyte senescence was not observed in the current study as J. bulbosus biomass is relatively constant in the Rysstad Basin (Schneider et al., unpublished data). The significant effect of day-of-year is thus related to temperature rather than macrophyte growth or senescence. A single study, from a shallow (< 1 m) freshwater wetland, found a positive effect of macrophyte presence on detection probability, but this was explained as an artefact of the nested nature of the random effects that could not be accounted for in the study design [26]. The impact of aquatic macrophytes on the performance of a positioning systems (based on time of arrival) has only been evaluated in a single study from a marine seagrass habitat. Here positional accuracy and precision were significantly lower when transmitters were positioned within seagrass (0.9 m) compared to above (0.45 m) [27]. These results demonstrate the importance of in situ range testing before conducting acoustic telemetry studies in ecosystem with macrophytes. The current range testing studies from ecosystem with macrophytes have been conducted under different design and environmental conditions, e.g., with receivers placed above the seagrass meadow [27], in very shallow ecosystem (< 1 m) with sparse Phragmites spp. stems and use of high-powered transmitters (158 dB) [26] or with just a single receiver [31]. However, no studies have reported detection ranges larger than 196 m hence designing receiver arrays in ecosystems with macrophytes suggest high density of receivers.
The effect of macrophytes on detection probability has, moreover, been suggested to be species dependent [27, 31]. Distinct morphology and leaf architecture between macrophyte species are likely to influence differently on sound propagation. In general, species with finely dissected leaves forming dense beds, such as J. bulbosus, create high hydraulic resistance, hence high attenuation of acoustic signals, compared to species with a simple leaf structure for example Sparganium sp. [2] and Phragmites sp. [26]. Moreover, the photosynthetic activity of macrophytes has been found to also control sound propagation [5, 33]. In a study on acoustic refuge for fish in seagrass meadows, the sound transmission through a seagrass canopy was altered by the formation of oxygen bubbles mediated by photosynthesis [33]. The influence of photosynthetic activity on sound propagation was more profound for high-frequency sound (e.g., also for transmitters with high frequency), as their shorter wavelengths are more likely to interact with the small oxygen bubbles and thus increase the sound attenuation [33]. The photosynthetic control on sound propagation was found to be highly species-specific, as photosynthetic activity is highly variable between species. However, future research is necessary to explore how differences in macrophyte complexity and photosynthetic activity will affect detection probability in freshwater ecosystems [27, 31].
Additional environmental conditions that are likely to influence acoustic telemetry performance were also assessed. The upstream hydropower plant formed a unique opportunity to evaluate the effect of total gas saturation on acoustic telemetry performance. Detection probability was negatively affected by levels of high total gas saturation (i.e., gas supersaturation), and to our knowledge this is the first study to evaluate how gas supersaturation impacts detection probability and consequently performance of acoustic telemetry used for positioning of aquatic animals. Air bubbles in surface water, caused by mixing of wind and rain have previous been shown to attenuate sound by absorption and scatting of the acoustic signals [6] and air bubbles caused by super saturation will likely have the same impact. Our results, therefore, suggest that consideration of the impact of gas supersaturation on detection probability can is important when designing receiver array in environments with high gas saturation levels. The implication of high gas saturation levels for acoustic telemetry studies is likely to be less profound for studies conducted in deeper ecosystems, as total gas saturation levels have been shown to decrease with 9.7% per meter, thus supersaturation will only be of concern in the surface waters or in shallow ecosystems [20]. The day-of-year proxy for water temperature, had a significant effect on detection probability, where detection probabilities were highest in late spring and early autumn (lower temperatures approx. 4–8 °C) compared to summer (temperature maximum 12 °C). This is in concordance with expectations and previous findings [34], as water temperature affects propagation of sound through its impact on water density [17]. Finally, a strong diurnal pattern was observed, where detection probability was increasing during the day and declining at night. This is in concordance with findings in previous studies [14, 19, 27] and has been suggested to be caused by biological sources, such as macrophyte metabolism or animals that are nocturnally active and create background noise. Macrophytes produce oxygen via photosynthesis that is either emitted during day or stored at night [14] thus contributing to the attenuation of the acoustic signal. In the Rysstad Basin, the strong diurnal pattern in detection probability is most likely caused by the metabolism of the dense J. bulbosus stands and, therefore, not to be confused for fish behaviour as it may look like fish are hiding during the day but it is actually a loss of range.
Conclusions
This study demonstrated that within a shallow freshwater ecosystem, dense macrophyte biomass and total gas saturation are underestimated factors negatively influencing transmission of acoustic signals and hence the performance of acoustic telemetry. Vertical position of transmitters (i.e., potential fish) was also found to be important for the detection probability and individuals close to the sediment and surface had significant lower probability of detection. Moreover, this study revealed that using the averaging position method to estimate individuals position caused low positional accuracy and precision. Our findings emphasise the importance of in situ range testing that should be conducted to design a receiver array with sufficient detection range. To optimise the acoustic telemetry performance in shallow freshwater ecosystem like the Rysstad Basin, having receivers close together and placed at different heights could be one suggestion together with applying stronger synchronisation tags and transmitters with low-frequency sound. Another alternative would be to use radio tags instead as their wavelength is longer; however, the precision of radio tags is lower. In the future and with increasing research on the topic, it may be possible to develop a set of recommendations that can be applied in shallow ecosystems with high macrophyte biovolumes and/or in systems, where gas supersaturation occurs.
Availability of data and materials
The data sets used/or analysed in this study are available from the corresponding author on reasonable request.
Abbreviations
- DoY:
-
Day-of-year
- GLM:
-
Generalised linear models
- GAMM:
-
Generalised additive mixed models
- AIC:
-
Akaike Information Criterion
References
Andrews KS, Tolimieri N, Williams GD, Samhouri JF, Harvey CJ, Levin PS. Comparison of fine-scale acoustic monitoring systems using home range size of a demersal fish. Mar Biol. 2011;158:2377–87. https://doi.org/10.1007/s00227-011-1724-5.
Bal K, Struyf E, Vereecken H, Viaene P, De Doncker L, de Deckere E, Mostaert F, Meire P. How do macrophyte distribution patterns affect hydraulic resistances? Ecol Eng. 2011;37:529–33. https://doi.org/10.1016/j.ecoleng.2010.12.018.
Cagua EF, Berumen M, Tyler EHM. Topography and biological noise determine acoustic detectability on coral reefs. Coral Reefs. 2013. https://doi.org/10.1007/s00338-013-1069-2.
Dance MA, Moulton DL, Furey NB, Rooker JR. Does transmitter placement or species affect detection efficiency of tagged animals in biotelemetry research? Fish Res. 2016;183:80–5. https://doi.org/10.1016/j.fishres.2016.05.009.
Freeman SE, Freeman LA, Giorli G, Haas AF. Photosynthesis by marine algae produces sound, contributing to the daytime soundscape on coral reefs. PLoS ONE. 2018;13: e0201766. https://doi.org/10.1371/journal.pone.0201766.
Gjelland KØ, Hedger RD. Environmental influence on transmitter detection probability in biotelemetry: developing a general model of acoustic transmission. Methods Ecol Evol. 2013;4:665–74. https://doi.org/10.1111/2041-210X.12057.
Heupel MR, Semmens JM, Hobday AJ. Automated acoustic tracking of aquatic animals: scales, design and deployment of listening station arrays. Mar Freshw Res. 2006;57:1–13. https://doi.org/10.1071/MF05091.
Hightower JE, Jackson JR, Pollock KH. Use of telemetry methods to estimate natural and fishing mortality of striped bass in Lake Gaston, North Carolina. Trans Am Fish Soc. 2001;130:557–67. https://doi.org/10.1577/1548-8659(2001)130%3c0557:UOTMTE%3e2.0.CO;2.
Holmes RJ, Hayes JW, Closs GP, Beech M, Jary M, Matthaei CD. Mechanically reshaping stream banks alters fish community composition. River Res Appl. 2019;35:247–58. https://doi.org/10.1002/rra.3407.
Hussey NE, Kessel ST, Aarestrup K, Cooke SJ, Cowley PD, Fisk AT, Harcourt RG, Holland KN, Iverson SJ, Kocik JF, Mills Flemming JE, Whoriskey FG. ECOLOGY Aquatic animal telemetry: A panoramic window into the underwater world. Science. 2015;348:1255642. https://doi.org/10.1126/science.1255642.
Huveneers C, Simpfendorfer CA, Kim S, Semmens JM, Hobday AJ, Pederson H, Stieglitz T, Vallee R, Webber D, Heupel MR, Peddemors V, Harcourt RG. The influence of environmental parameters on the performance and detection range of acoustic receivers. Methods Ecol Evol. 2016;7:825–35. https://doi.org/10.1111/2041-210X.12520.
Jeppesen E, Søndergaard M, Søndergaard M, Christoffersen K. The structuring Role of Macrophytes in Lakes. Ecological Studies: Springer; 1998.
Kessel ST, Cooke SJ, Heupel MR, Hussey NE, Simpfendorfer CA, Vagle S, Fisk AT. A review of detection range testing in aquatic passive acoustic telemetry studies. Rev Fish Biol Fish. 2014;24:199–218. https://doi.org/10.1007/s11160-013-9328-4.
Lee KM, Ballard MS, Venegas GR, Sagers JD, McNeese AR, Johnson JR, Wilson PS, Rahman AF. Broadband sound propagation in a seagrass meadow throughout a diurnal cycle. J Acoust Soc Am. 2019;146:335–41. https://doi.org/10.1121/1.5127737.
Lennox RJ, Thiemer K, Vollset KW, Pulg U, Stranzl S, Nilsen CI, Haugen TO, Velle G. Behavioural response of brown trout (Salmo trutta) to total dissolved gas supersaturation in a regulated river. Ecohydrology. 2021. https://doi.org/10.1002/eco.2363.
Lusardi RA, Jeffres CA, Moyle PB. Stream macrophytes increase invertebrate production and fish habitat utilization in a California stream. River Res Appl. 2018;34:1003–12. https://doi.org/10.1002/rra.3331.
Medwin H, Clay CS. Fundamentals of acoustical oceanography. Elsevier Science; 1998.
Olmedo OE. kriging: Ordinary Kriging. 2014.
Payne N, Gillanders BM, Webber DM, Semmens JM. Interpreting diel activity patterns from acoustic telemetry: the need for controls. Mar Ecol Prog Ser. 2010;419:295–301. https://doi.org/10.3354/meps08864.
Pleizier NK, Nelson C, Cooke SJ, Brauner CJ. Understanding gas bubble trauma in an era of hydropower expansion: how do fish compensate at depth? Can J Fish Aquat Sci. 2020. https://doi.org/10.1139/cjfas-2019-0243.
Pulg U, Stranzl S, Vollset KW, Barlaup BT, Olsen E, Skår B, Velle G. Gassmetning i Otra nedenfor Brokke kraftverk. NORCE Rep. 2016.
R Core Team. R: A languange and snvironment for statistical computing. R Found. Stat. Comput. Vienna Austria. 2020.
Ripley B, Venables B, Bates D, Hornik K, Gebhardt A, Firth D. MASS - Modern Applied Statistics with S. 2021.
Simpfendorfer CA, Heupel MR, Hueter RE. Estimation of short-term centers of activity from an array of omnidirectional hydrophones and its use in studying animal movements. Can J Fish Aquat Sci. 2002. https://doi.org/10.1139/f01-191.
Stasko AB, Pincock DG. Review of underwater biotelemetry, with emphasis on ultrasonic techniques. J Fish Board Can. 2011. https://doi.org/10.1139/f77-189.
Stott ND, Faust MD, Vandergoot CS, Miner JG. Acoustic telemetry detection probability and location accuracy in a freshwater wetland embayment. Anim Biotelemetry. 2021;9:19. https://doi.org/10.1186/s40317-021-00243-1.
Swadling DS, Knott NA, Rees MJ, Pederson H, Adams KR, Taylor MD, Davis AR. Seagrass canopies and the performance of acoustic telemetry: implications for the interpretation of fish movements. Anim Biotelemetry. 2020;8:8. https://doi.org/10.1186/s40317-020-00197-w.
Unmuth JML, Hansen MJ, Rasmussen PW, Pellett TD. Effects of mechanical harvesting of eurasian watermilfoil on angling for bluegills in Fish Lake. Wisconsin North Am J Fish Manag. 1999;21:448–54. https://doi.org/10.1577/1548-8675(2001)021%3c0448:EOMHOE%3e2.0.CO;2.
Velle G, Skoglund H, Barlaup BT. Effects of nuisance submerged vegetation on the fauna in Norwegian rivers. Hydrobiologia. 2021. https://doi.org/10.1007/s10750-020-04465-x.
Verhofstad MJJM, Bakker ES. Classifying nuisance submerged vegetation depending on ecosystem services. Limnology. 2019;20:55–68. https://doi.org/10.1007/s10201-017-0525-z.
Weinz AA, Matley JK, Klinard NV, Fisk AT, Colborne SF, Weinz AA, Matley JK, Klinard NV, Fisk AT, Colborne SF. Performance of acoustic telemetry in relation to submerged aquatic vegetation in a nearshore freshwater habitat. Mar Freshw Res. 2021. https://doi.org/10.1071/MF20245.
Wickham H, Chang W, Henry L, Pedersen TL, Takahashi K, Wilke C, Woo K, Yutani H, Dunnington D, RStudio. ggplot2: Create Elegant Data Visualisations Using the Grammar of Graphics. 2020.
Wilson CJ. The acoustic ecology of submerged macrophytes (thesis). 2011.
Winter ER, Hindes AM, Lane S, Britton JR. Detection range and efficiency of acoustic telemetry receivers in a connected wetland system. Hydrobiologia. 2021;848:1825–36. https://doi.org/10.1007/s10750-021-04556-3.
Wood S. mgcv: Mixed GAM Computation Vehicle with Automatic Smoothness Estimation. 2021.
Acknowledgements
We wish to thank Benoît Demars, Susanne Schneider, Astrid Torske, Cecilie Nielsen and Lorenzo Pin for field assistance and Jacqueline Knutson for language corrections. We thank Otra Kraft and Torstein Try for kindly providing boats. Finally, we thank Kim Magnus Bærum, Norwegian Institute for Nature Research for valuable comments on an earlier version of the manuscript.
Funding
The research was funded by the Research Council of Norway (297202/E10), the German Federal Ministry of Education and Research (033WU005), the French Agence National de Recherche (N° ANR-18-IC4W-0004-06), the South African Water Research Commission (K5/2951), and the Fundação Araucária in Brazil (N° 186/2019) for funding of MadMacs (Mass development of aquatic macrophytes—causes and consequences of macrophyte removal for ecosystem structure, function, and services) in the frame of the collaborative international consortium of the 2017 call of the Water Challenges for a Changing World Joint Programme Initiative (Water JPI). RL was supported by Grant “SUPERSAT” from the Norwegian Research Council (project 294742). Additional funding is provided by Krypsivprosjektet på Sørlandet, NIVA and NMBU to support PhD-student KTH in Norway.
Author information
Authors and Affiliations
Contributions
KT and TH developed the study. KT, RL, TH did the fieldwork. KT did the analyses. KT led the writing of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Additional file 1: Figure S1.
Density maps of average water level above J. bulbosus (cm) for the five periods. Lines represent the distance between transmitter deployments and receivers (40 combination for each period).
Additional file 2: Figure S1.
Bubble-plot representation of the number each sync tag (n = 8) was detected on the 20 receivers between March 2020 and September 2020. Figure S2. Network plot between transmitter deployments and receivers based on log number of detections. Red dots indicate receivers and green dots the transmitter deployments within and outside J. bulbosus stands respectively for the six relocations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. The Creative Commons Public Domain Dedication waiver (http://creativecommons.org/publicdomain/zero/1.0/) applies to the data made available in this article, unless otherwise stated in a credit line to the data.
About this article

Cite this article
Thiemer, K., Lennox, R.J. & Haugen, T.O. Influence of dense macrophyte vegetation and total gas saturation on the performance of acoustic telemetry. Anim Biotelemetry 10, 4 (2022). https://doi.org/10.1186/s40317-022-00275-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40317-022-00275-1