Abstract
Acoustic telemetry is an important tool for assessing the behavioural ecology of aquatic animals, but the performance of receivers can vary spatially and temporally according to changes in environmental gradients. Studies testing detection efficiency and/ or detection range are, therefore, important for data interpretation, although the most thorough range-testing approaches are often costly or impractical, such as the use of fixed sentinel tags. Here, stationary tag data (from study animals that had either died or expelled their tags) provided a substitute for the long-term monitoring of receiver performance in a wetland environment and was complemented by periodic boat-based range testing, with testing of the effects of environmental variables (water temperature, conductivity, transparency, precipitation, wind speed, acoustic noise) on detection efficiency (DE) and detection range (DR). Stationary tag DE was highly variable temporally, the most influential factors being water temperature and precipitation. Transparency was a strong predictor of DR and was dependent on chlorophyll concentration (a surrogate measure of algal density). These results highlight the value of stationary tag data in assessments of acoustic receiver performance. The high seasonal variability in DE and DR emphasises the need for long-term receiver monitoring to enable robust conclusions to be drawn from telemetry data.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The application of acoustic telemetry to examining the space-use and behaviour of aquatic animals has grown exponentially in recent decades (Hussey et al., 2015). It has benefitted from rapid technological development (e.g. Klinard et al., 2019b; Reubens et al., 2019), resulting in a wealth of data to support species and habitat management (Brooks et al., 2019) in both the marine and freshwater environments (e.g. Davies et al., 2020).
Passive acoustic telemetry functions by transmission of coded ultrasonic signals between tags (transmitters implanted in/ attached to moving organisms) and submerged hydrophones coupled with receivers (‘receivers’ hereafter), which are usually positioned at fixed locations. When a tag is within detection range of a receiver, its unique identity is recorded, along with a date-time stamp. Data can be collected continuously for multiple individuals across broad spatial scales, providing distinct advantages over more traditional methods of active animal tracking (Kessel et al., 2014). Furthermore, technologic advances are reflected in extended battery lives of tags. In response, the duration of studies has expanded from hours to multiple years (Hussey et al., 2015). Consequently, aquatic acoustic tracking is increasingly conducted across a broad range of environments, from the Amazon (Hahn et al., 2019) to the Arctic (Kessel et al., 2016), and under environmental conditions that can fluctuate considerably over time. However, assessments of how the performance of receivers varies over time and space have been less frequent (Kessel et al., 2014), risking the misinterpretation of animal behaviour if the frequency of acoustic detections do not directly represent the space-use and activity of tagged animals (Payne et al., 2010).
The successful transmission of an acoustic signal over a specific distance depends on several factors, including the intensity of the signal at the point of generation (i.e. tag power output); the amount of signal loss due to spreading, refraction, reflection and absorption by the water and other objects; and the extent of interference from background noise (Medwin & Clay, 1998). These factors are controlled by many variables, some of which may be constant through time and so can be accounted for at the study onset, such as habitat type (e.g. depth, substrate; Selby et al., 2016), transmitter type (How & de Lestang, 2012), transmitter location (e.g. internal or external attachment; Dance et al., 2016) and receiver mooring design (Clements et al., 2005; Huveneers et al., 2016). Other variables affecting the ability of receivers to detect transmitters may fluctuate substantially over a study period, such as tag orientation (Ammann, 2020), the physical or chemical properties of water (e.g. temperature, salinity, turbidity; Huveneers et al., 2016), water movement (e.g. waves, tides, river flows; How and de Lestang, 2012; Mathies et al., 2014), meteorological conditions (e.g. wind, rain; Gjelland & Hedger, 2013), biofouling (Heupel et al., 2008) and/ or ambient, anthropogenic and biotic noise (Payne et al., 2010; Reubens et al., 2019). In addition, signal collisions can occur when the transmissions of multiple tags interfere with each other (Simpfendorfer et al., 2008; Pincock, 2012). While this is minimised by tags with random transmission intervals, it has implications if study species form large aggregations within range of receivers.
As a result of these inconsistencies, analyses of acoustic telemetry data require an understanding of the variability in the probability of detection over space and time if researchers are to examine rates of movement, space-use and/ or activity, as opposed to simply recording the movement trajectories of animals. The term ‘detection range’ (DR) describes the maximum distance over which an acoustic transmitter can be detected by a receiver, while detection efficiency (DE) is defined as the number of detections in a set period as a proportion of the total number possible (Brownscombe et al., 2020). DE typically shows a logistic relationship of decay with increasing distance from an acoustic receiver (Kessel et al., 2014). Assessment of DE can be completed in a number of ways, the most thorough being the use of fixed sentinel tags at regular distance intervals from focal receivers (Kessel et al., 2014; Selby et al., 2016; Brownscombe et al., 2020). However, comparatively few studies have adopted this method in riverine or wetland environments (but see Whitty et al., 2009; Béguer-Pon et al., 2015), perhaps because feasibility is limited by factors that prevent safe deployment, such as high flow variability and/ or high anthropogenic disturbance in navigable waterways.
In highly connected wetlands, where the habitats used by fishes can include a range of lentic and lotic areas, the prevailing environmental conditions can vary spatially and temporally, potentially impacting both DE and DR. This is particularly pertinent to the Norfolk Broads, Eastern England, where the landscape includes nutrient rich, shallow lakes connected to lowland rivers used for navigation. Using this area as the study system, the aim was to assess spatial and temporal variability in the detection range and efficiency of acoustic receivers. High levels of boat traffic in this shallow environment prevented the use of sentinel transmitters moored at fixed distances from receivers. However, following the tagging of wild fish as part of a companion study, it became apparent that stationary transmitters were present in the vicinity of some receivers, having either been expelled by tagged fish or the tagged fish had died there. These transmitters enabled the continuous monitoring of receiver DE for up to 16 months. Stationary tag data were then complemented by periodic boat-based range testing using a dedicated range-testing tag. The study objective was thus to quantify both acoustic receiver DE and DR, and test changes in these in relation to temporally variable environmental conditions (water temperature, transparency, conductivity, wind speed, precipitation and acoustic noise).
Materials and methods
Study system
The focus of the study was the River Bure, which forms part of the Broads National Park, a protected wetland characterised by many small shallow lakes (medieval peat diggings termed ‘Broads’; Fig. 1). The system is tidal and experiences major saline incursions during tidal surges and/ or low river flows, generally in winter, with the upstream limit of saline intrusion believed to be at Horning (Fig. 1; Clarke, 1990). The Bure flows south-east into the North Sea, with a mean discharge of 6 m3s−1. Its channel widths in the study area are 25–30 m wide, with depths to 3 m, and a substrate predominantly consisting of silt and peat.

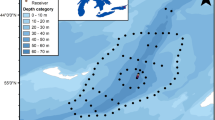
Map of the River Bure study system showing locations of the acoustic receivers used in range testing, plus those in range of stationary tags which were used to measure detection efficiency. Receivers are numbered according to Table 1. The location of the temperature logger and water sampling sites (Environment Agency, 2020) are also pictured. The Broads National Park area is shaded green
A fixed array of 44 acoustic receivers (Vemco, VR2W) was deployed in the river and connected wetlands in October 2017 and January 2018 to track the movements of native fish species. Measures of DE (using stationary transmitters from tagged fish) or DR (using boat-based range testing) were estimated for nine receivers that covered both lentic and lotic habitats (Table 1; Fig. 1). Data were downloaded quarterly, when the hydrophones were also cleaned of biofouling. Receivers were attached to permanent underwater structures, moored on wooden posts or suspended from floating objects (Table 1), and were continuously operational until the study end in November 2019. All receivers were placed at approximately mid-water depth (1–1.5 m) and were generally positioned in channel/ lake margins.
Stationary tags
As part of a companion study, common bream Abramis brama (L.) were sampled from the River Bure by rod and line angling during November 2017 and April 2018. Under anaesthesia (Tricaine methanesulfonate, MS-222), fish were surgically implanted with an acoustic transmitter (‘tag’ hereafter) (V13: 69 kHz; low power output; length 36 mm × diameter 13 mm, 6.0 g mass in water; random transmission interval around 90 s; estimated battery life 1200 days) and released following their return to normal behaviour. All regulated procedures were performed under the UK Home Office project licence 70/8063 and after ethical review. Between 18 January 2018 and 15 May 2019, acoustic signals from eight of the tagged bream became stationary within range of an acoustic receiver (Fig. 1), either due to fish death or tag expulsion. These stationary tags subsequently became surrogates for sentinel tags in the monitoring of acoustic receiver DE. Three stationary tags were located using manual acoustic tracking (Vemco; VR100) and their distance to the nearest acoustic receiver was estimated (± 25 m; Table 1). Other tags could not be located due to resource constraints. Detection data from all stationary tags were collected until 5 November 2019, except for one tag whose data were collected from 5 April 2018 to 1 August 2018, after which it was no longer in range of a receiver due to it being redeployed in a different location (Receiver #4; Table 1; Fig. 1). Another receiver (Receiver #6) was moved by approximately 100 m during the study period, while the nearby stationary tag remained in range; for this tag, the pre- and post-relocation data were separated (Fig. 2).

Daily detection efficiency of one stationary tag in range of an acoustic receiver. Separate lines represent data collected pre- and post-receiver redeployment on 22 August 2018. The transmitter was originally located to within 50 m of the receiver, but following receiver redeployment this distance increased to approximately 150 m
Detection range testing
A total of 14 range tests were conducted for two receivers situated in Wroxham Broad (WB; N = 8) and South Walsham Broad (SWB; N = 6) between January and November 2019 (Fig. 1). These locations offered sufficient space for range testing, while representative of distinct environmental conditions. WB is situated upstream of the saline limit at Horning and has a relatively high exchange of water with the River Bure, while SWB is situated further downstream, below the limit of saline incursion, but is much less strongly influenced by main river flows. Due to its location, SWB has occasional high saline events and typically displays higher residual conductivity (as a measure of salinity) than WB. In addition, the release of phosphorus from the sediment in SWB results in dense blooms of phytoplankton during warmer months (Moss & Balls, 1989). In each location, DR was estimated by lowering a range testing tag (V13; 69 kHz; low power output; fixed 10 s transmission interval) from a stationary boat to 1 m below the water surface at distance intervals of approximately 50 m from the receiver. The tag was held underwater for 1 min, and DR was recorded as the maximum distance over which the tag remained detectable. Exact distances were verified using GPS positions taken during range testing.
Environmental data
Water temperature (± 0.5°C) in the River Bure was recorded at 15-min intervals throughout the study period by a data logger (HOBO® Pendant; model MX2202, Onset Computer Corporation; Fig. 1). Half-hourly records of average wind speed (ms−1) at Norwich airport (10 km from study site), plus six-hourly records of precipitation (cm) at the MET office station at Weybourne (33 km from study site), were obtained from an online meteorological archive (Raspisaniye Pogodi Ltd, 2020). During range testing in WB and SWB, point measurements of water temperature (± 0.2°C) and conductivity (± 0.005 mS cm−1) were taken using a YSI meter (Pro Plus), with water transparency (± 0.1 m) measured using a Secchi disk. Further data on water transparency and chlorophyll (a and b) concentration, measured at monthly intervals between November 2017 and February 2020, were sourced for six locations across the study site (Fig. 1; Environment Agency, 2020).
Statistical analysis
First, the stationary tag data were tested in generalised linear mixed models (GLMM) to estimate the probability of detection as a function of mean daily water temperature, mean daily wind speed, total daily precipitation and the daily noise quotient. The noise quotient was calculated from summary data stored by the receivers (Simpfendorfer et al., 2008) and provided a measure of acoustic noise in the environment, with negative values indicating tag collisions and positive values indicating ambient/ anthropogenic/ biotic noise. Transparency and conductivity were not included as explanatory variables here as their monitoring in the study area was not conducted on a sufficiently regular basis. The GLMM response variable was the daily number of recorded detections, as a proportion of the maximum number possible given the transmission interval. This required a binomial family structure and logit link function, with random effects of tag ID and receiver location accounting for variation in tag/receiver habitat and distance from the receiver. Covariates were initially parameterised separately in univariate models, then combinations of those resulting in a reduction in Akaike’s information criterion (AIC) values were compared in multivariate models. Model comparison followed the minimisation of AIC, with those exhibiting ΔAIC < 2 awarded strong support alongside the best model, providing they were not more complex versions of nested models with lower AIC (Richards et al., 2011).
Next, the range testing data were tested in linear mixed models (LMM) to examine the effect of water temperature, conductivity, wind speed and transparency on the maximum DR of acoustic receivers, with receiver location (WB; SWB) included as a random effect. Seasonal fluctuations meant that temperature and transparency were correlated (WB: r = − 0.84, P = 0.009; SWB: r = − 0.89, P = 0.016), as well as temperature and conductivity at WB (r = − 0.86, P = 0.006), so these covariates were not modelled together. Precipitation was excluded as an explanatory variable here due to the range testing being carried out in absence of rain. Furthermore, noise quotients were unavailable for the limited timeframes of range testing (less than 24 h). Model selection followed the minimisation of AIC, as above. Finally, the relationship between water transparency and chlorophyll concentration was explored using the water quality data in an LMM. Data were log-log transformed (Carlson, 1977), with sample site representing a random effect. All analyses were conducted in R 3.6.2 (R Core Team, 2019) using the package lme4 (Bates et al., 2015).
Results
Detection efficiency
The daily detection efficiency (DE) of stationary tags was highly variable, both spatially and temporally, and ranged from 0 to 100% (Figs. 2, 3). Mean DE for each tag ranged from 2.2 to 95.2% (Table 2). All covariates in the univariate models, except wind speed, resulted in reduced AIC. Mean daily water temperature and total daily precipitation were retained in the best-fitting GLMM predicting DE, with both variables having a negative effect on the probability of detection (Table 3a; Fig. 3). Water temperature was a particularly strong predictor of DE, with AIC increasing substantially when it was removed from the model (ΔAIC = 230; Online Resource 1). While the noise quotient varied from − 114,660 to 391, with 87% of values below zero, suggesting a high incidence of tag collisions, noise did not contribute to the best model predicting DE. No other combinations of variables were awarded strong support under the selection criteria (Online Resource 1). The estimated between-tag and between-receiver standard deviations were considerably larger than the magnitude of the fixed effects (Table 3a), indicating significant spatial variation in DE due to habitat and/ or distance from the receiver (Fig. 3).

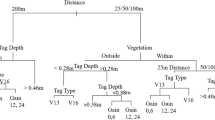
The effects of a mean daily temperature and b total daily precipitation on the detection efficiency of stationary tags according to the best-fitting GLMM model. Lines represent separate transmitter data included as a random effect. Labels in panel a signify the distance between certain transmitters and their nearest acoustic receiver. Where lines are not labelled in a, the location of stationary transmitters was not confirmed and thus distances could not be estimated
Detection range
Boat-based detection range testing was conducted over varying environmental conditions at both sites, with water temperature ranging from 2.9 to 23.1°C, transparency from 0.3 to 2.0 m, and wind speed from 5 to 14 m s−1. Conductivity at Wroxham Broad (WB) was stable (mean ± SD: 0.80 ± 0.03 mS cm−1), but at South Walsham Broad (SWB) varied from 0.83 to 5.69 mS cm−1 (1.96 ± 1.88 mS cm−1). Measurements of detection range (DR) varied from 30 to 840 m. All covariates improved LMM fit relative to the null model, but the best model predicting DR retained transparency and wind speed (Table 3b), with no other combinations of covariates receiving strong support under the selection criteria (Online Resource 2). Notably, the removal of transparency resulted in a model with a relatively high ΔAIC value (19.3), indicating its high explanatory power (Fig. 4; Online Resource 2). While wind speed was also included in the best model, uncertainty in the magnitude of its effect was high and overlapped zero (Table 3b). Variation in DR according to the random effect of receiver location was low relative to the magnitude of the effect of transparency, but high relative to the effect of wind speed (Table 3b). In addition, chlorophyll concentration was a strong predictor of water transparency across the study system (Table 3c; Fig. 5), reducing AIC by 92.2 relative to the null model.

Effect of water transparency (as Secchi disk depth) on the maximum acoustic detection range measured periodically in Wroxham Broad (triangles) and South Walsham Broad (circles). The solid line and greyed area represent predictions and 95% confidence intervals according to the best-fitting LMM

Effect of chlorophyll concentration on the transparency of water samples collected across the study site (Environment Agency, 2020). Sample sites are signified by point colour. The solid line and greyed area represent predictions and 95% confidence intervals according to the best-fitting LMM
Discussion
Awareness of issues surrounding the performance of receivers for acoustic telemetry has grown in recent years, with studies having increasingly investigated variability across biotic and abiotic gradients (Kessel et al., 2014; Huveneers et al., 2016). Here, stationary transmitters in the environment enabled the measurement of the long-term DE of receivers in an environment where the deployment of sentinel tags was not feasible. The results revealed high spatial and temporal variability in receiver performance; daily detection efficiency decreased with elevated water temperature and precipitation, and variability between tags indicated a dependence on transmission distance and habitat typology. Complementary boat-based range testing revealed water transparency to be a strong predictor of maximum detection range.
Temperature affects the propagation of sound in water through its impact on water density (Medwin & Clay, 1998). How & de Lestang (2012) also reported a reduction in DE with increased temperature, although other studies have reported no significant correlation (Heupel et al., 2008; Gjelland & Hedger, 2013). While thermal stratification of water is key to explaining reduced DE in some systems (e.g. Huveneers et al., 2016; Klinard et al. 2019a), it is unlikely to apply to the River Bure as depths do not exceed 4 to 5 m, and even less probable in broads with mean water depths of 1.5–2 m. Alternatively, water temperature may be associated with other factors affecting DE in the study system, such as seasonal anthropogenic noise (i.e. boat traffic related to tourism, Moss, 1977), algal blooms (Moss & Balls, 1989) and/ or macrophyte growth (Weinz, 2020). Indeed, periodic range testing revealed transparency (or turbidity) was a better predictor of maximum DR than temperature. Furthermore, the results revealed a clear association between transparency and chlorophyll concentration, which is an indicator of the density of algal blooms (Moss & Balls, 1989). This finding is consistent with a number of other studies suggesting phytoplankton impacts acoustic receiver performance (Shroyer & Logsdon, 2009; Gjelland & Hedger, 2013). Consequently, water temperature may be both directly and indirectly linked to the temporal fluctuations in DE observed here.
The influence of precipitation and wind is expected to be more prominent in shallow water than at depth due to the entrainment of air bubbles that enhances sound absorption and scattering (Gjelland & Hedger, 2013). While evidence here suggested rain reduced DE, wind speed could not predict DE and its effect on DR was uncertain. This is perhaps due to the relatively sheltered nature of the study system compared to large lacustrine, estuarine or marine sites that feature in other range-testing studies (e.g. Gjelland & Hedger, 2013; Huveneers et al., 2016; Reubens et al., 2019). Conductivity was not a strong predictor of DR, but Heupel et al. (2006) reported reduced DR in freshwater versus estuarine sites, with Simpfendorfer et al. (2008) suggesting that the stratification of water in estuaries can lead to greater acoustic interference. This emphasises the need for more detailed investigation into the effect of salinity gradients on acoustic receiver ranges.
The study system was characterised by a predominantly silt sediment, upon or within which the stationary tags would have settled. Acoustic receivers can exhibit higher detection range in environments with more homogenous substrates (Selby et al., 2016; Brownscombe et al., 2020), although the detection of tags on or embedded in soft sediment is likely to be less efficient than tags suspended in the water column, such as during boat-based range testing (Heupel et al., 2006). This may explain why boat-based measurements of DR often exceeded 400 m, despite analyses of the stationary tag data suggesting DE was low for tags situated greater than 250 m from the receivers. Moreover, some variation from the results here would be expected if the experiment were to be repeated with fixed sentinel tags. Nevertheless, evidence suggests that traditional range testing methods can considerably overestimate the detection probability of tagged animals in situ (Dance et al., 2016), and thus these estimates of DE may be more representative of the detection of benthic foraging fish species, such as common bream.
Few studies have examined long-term variability in acoustic receiver DE and/ or DR (for 12+ months; Kessel et al., 2014, Huveneers et al., 2016), yet the patterns detected here highlight the importance of capturing the effects of natural seasonally fluctuating conditions. This knowledge can enhance detection probability estimates for tagged animals (Whoriskey et al., 2019) and could be incorporated into statistical models, such as mark-recapture or state space models (Brownscombe et al., 2020). Thus, efforts should always be made to determine spatial and temporal variability in receiver performance wherever possible. These efforts should attempt to capture changes in receiver performance across the full range of environmental conditions encountered, which will be unique to each ecosystem (e.g. differences due to climate, substrate/habitat type, water depth). Where this is not feasible, extrapolation from studies (such as this one) enables some measure of uncertainty to be acknowledged from similar systems, although care must be taken to ensure irregularities between study systems do not introduce biases. As routine assessments of receiver performance increase in frequency, meta-analyses may facilitate the development of correction factors for detection range and efficiency based on abiotic factors across generalised systems.
Adopting a fixed sentinel tag approach for monitoring DE can be costly or inappropriate, especially if receivers are sparsely dispersed throughout a heterogeneous environment (Kessel et al., 2014; Brownscombe et al., 2020). However, this study demonstrates the utility of exploiting data from stationary tags that could otherwise be overlooked. The unpredictable nature of animal death and/or tag expulsion, along with a lack of knowledge regarding the precise locations of tags, presents some obvious limitations of incorporating this technique into study designs. However, the results indicate that stationary tag data, if available, can provide equally valuable information on acoustic receiver performance, when compared to active range testing.
Data and code availability
The datasets and code generated and analysed during the current study are available from the corresponding author upon reasonable request.
References
Ammann, A. J., 2020. Factors affecting detection probability and range of transmitters and receivers designed for the Juvenile Salmon Acoustic Telemetry System. Environmental Biology of Fishes 103: 625–634.
Bates, D., M. Maechler, B. Bolker & S. Walker, 2015. Fitting linear mixed-effects models using lme4. Journal of Statistical Software 67: 1–48.
Béguer-Pon, M., M. Castonguay, J. Benchetrit, D. Hatin, M. Legault, G. Verreault, Y. Mailhot, V. Tremblay & J. J. Dodson, 2015. Large-scale, seasonal habitat use and movements of yellow American eels in the St. Lawrence River revealed by acoustic telemetry. Ecology of Freshwater Fish 24: 99–111.
Brooks, J. L., J. M. Chapman, A. Barkley, S. T. Kessel, N. E. Hussey, S. G. Hinch, D. A. Patterson, K. J. Hedges, S. J. Cooke & A. T. Fisk, 2019. Biotelemetry informing management: case studies exploring successful integration of biotelemetry data into fisheries and habitat management. Canadian Journal of Fisheries and Aquatic Sciences 76: 1238–1252.
Brownscombe, J. W., L. P. Griffin, J. M. Chapman, D. Morley, A. Acosta, G. T. Crossin, S. J. Iverson, A. J. Adams, S. J. Cooke & A. J. Danylchuk, 2020. A practical method to account for variation in detection range in acoustic telemetry arrays to accurately quantify the spatial ecology of aquatic animals. Methods in Ecology and Evolution 11: 82–94.
Carlson, R. E., 1977. A trophic state index for lakes. Limnology and Oceanography 22: 361–369.
Clarke, K., 1990. Salt water penetration into the Upper Bure. The Norfolk & Norwich 28: 381.
Clements, S., D. Jepsen, M. Karnowski & C. B. Schreck, 2005. Optimization of an acoustic telemetry array for detecting transmitter-implanted fish. North American Journal of Fisheries Management 25: 429–436.
Dance, M. A., D. L. Moulton, N. B. Furey & J. R. Rooker, 2016. Does transmitter placement or species affect detection efficiency of tagged animals in biotelemetry research? Fisheries Research 183: 80–85.
Davies, P., R. J. Britton, A. D. Nunn, J. R. Dodd, C. Crundwell, R. Velterop, N. Ó’Maoiléidigh, R. O’Neill, E. V. Sheehan & T. Stamp, 2020. Novel insights into the marine phase and river fidelity of anadromous twaite shad Alosa fallax in the UK and Ireland. Aquatic Conservation: Marine and Freshwater Ecosystems. https://doi.org/10.1002/aqc.3343.
Environment Agency. 2020. Water Qaulity Archive. https://environment.data.gov.uk/water-quality/view/explore. Accessed 10 June 2020.
Gjelland, K. Ø. & R. D. Hedger, 2013. Environmental influence on transmitter detection probability in biotelemetry: developing a general model of acoustic transmission. Methods in Ecology and Evolution 4: 665–674.
Hahn, L., E. G. Martins, L. D. Nunes, L. F. da Câmara, L. S. Machado & D. Garrone-Neto, 2019. Biotelemetry reveals migratory behaviour of large catfish in the Xingu River, Eastern Amazon. Scientific Reports. https://doi.org/10.1038/s41598-41019-44869-x.
Heupel, M., J. M. Semmens & A. Hobday, 2006. Automated acoustic tracking of aquatic animals: scales, design and deployment of listening station arrays. Marine and Freshwater Research 57: 1–13.
Heupel, M. R., K. L. Reiss, B. G. Yeiser & C. A. Simpfendorfer, 2008. Effects of biofouling on performance of moored data logging acoustic receivers. Limnology and Oceanography: Methods 6: 327–335.
How, J. R. & S. de Lestang, 2012. Acoustic tracking: issues affecting design, analysis and interpretation of data from movement studies. Marine and Freshwater Research 63: 312–324.
Hussey, N. E., S. T. Kessel, K. Aarestrup, S. J. Cooke, P. D. Cowley, A. T. Fisk, R. G. Harcourt, K. N. Holland, S. J. Iverson & J. F. Kocik, 2015. Aquatic animal telemetry: a panoramic window into the underwater world. Science 348: 1255642.
Huveneers, C., C. A. Simpfendorfer, S. Kim, J. M. Semmens, A. J. Hobday, H. Pederson, T. Stieglitz, R. Vallee, D. Webber & M. R. Heupel, 2016. The influence of environmental parameters on the performance and detection range of acoustic receivers. Methods in Ecology and Evolution 7: 825–835.
Kessel, S., S. Cooke, M. Heupel, N. Hussey, C. Simpfendorfer, S. Vagle & A. Fisk, 2014. A review of detection range testing in aquatic passive acoustic telemetry studies. Reviews in Fish Biology and Fisheries 24: 199–218.
Kessel, S., N. Hussey, R. Crawford, D. Yurkowski, C. O’Neill & A. Fisk, 2016. Distinct patterns of Arctic cod (Boreogadus saida) presence and absence in a shallow high Arctic embayment, revealed across open-water and ice-covered periods through acoustic telemetry. Polar Biology 39: 1057–1068.
Klinard, N. V., E. A. Halfyard, J. K. Matley, A. T. Fisk & T. B. Johnson, 2019a. The influence of dynamic environmental interactions on detection efficiency of acoustic transmitters in a large, deep, freshwater lake. Animal Biotelemetry 7: 17.
Klinard, N. V., J. K. Matley, A. T. Fisk & T. B. Johnson, 2019b. Long-term retention of acoustic telemetry transmitters in temperate predators revealed by predation tags implanted in wild prey fish. Journal of Fish Biology 95: 1512–1516.
Mathies, N. H., M. B. Ogburn, G. McFall & S. Fangman, 2014. Environmental interference factors affecting detection range in acoustic telemetry studies using fixed receiver arrays. Marine Ecology Progress Series 495: 27–38.
Medwin, H. & C. S. Clay, 1998. Fundamentals of acoustical oceanography. Elsevier Science, Amsterdam.
Moss, B., 1977. Conservation problems in the Norfolk Broads and rivers of East Anglia, England – phytoplankton, boats and the causes of turbidity. Biological Conservation 12: 95–114.
Moss, B. & H. Balls, 1989. Phytoplankton distribution in a floodplain lake and river system. II Seasonal changes in the phytoplankton communities and their control by hydrology and nutrient availability. Journal of Plankton Research 11: 839–867.
Payne, N. L., B. M. Gillanders, D. M. Webber & J. M. Semmens, 2010. Interpreting diel activity patterns from acoustic telemetry: the need for controls. Marine Ecology Progress Series 419: 295–301.
Pincock, D. G. 2012. False detections: what they are and how to remove them from detection data. Vemco Application Note DOC-004691-03: http://vemco.com/wp-content/uploads/2012/2011/false_detections.pdf.
R Core Team, 2019. R: A Language and Environment for Statistical Computing. R Foundation for Statistical Computing, Vienna.
Raspisaniye Pogodi Ltd. 2020. https://rp5.ru/docs/about/en. Accessed 06 May 2020.
Reubens, J., P. Verhelst, I. van der Knaap, K. Deneudt, T. Moens & F. Hernandez, 2019. Environmental factors influence the detection probability in acoustic telemetry in a marine environment: results from a new setup. Hydrobiologia 845: 81–94.
Richards, S. A., M. J. Whittingham & P. A. Stephens, 2011. Model selection and model averaging in behavioural ecology: the utility of the IT-AIC framework. Behavioral Ecology and Sociobiology 65: 77–89.
Selby, T. H., K. M. Hart, I. Fujisaki, B. J. Smith, C. J. Pollock, Z. Hillis-Starr, I. Lundgren & M. K. Oli, 2016. Can you hear me now? Range-testing a submerged passive acoustic receiver array in a Caribbean coral reef habitat. Ecology and Evolution 6: 4823–4835.
Shroyer, S. M. & D. E. Logsdon, 2009. Detection distances of selected radio and acoustic tags in Minnesota lakes and rivers. North American Journal of Fisheries Management 29: 876–884.
Simpfendorfer, C. A., M. R. Heupel & A. B. Collins, 2008. Variation in the performance of acoustic receivers and its implication for positioning algorithms in a riverine setting. Canadian Journal of Fisheries and Aquatic Sciences 65: 482–492.
Weinz, A. A. 2020. Acoustic telemetry in freshwater habitats: the influence of macrophytes on acoustic transmitter detection efficiency and identifying predation using novel transmitters. Great Lakes Institute for Environmental Research, University of Windsor Electronic Theses and Dissertations. 8327.
Whitty, J. M., D. L. Morgan, S. C. Peverell, D. C. Thorburn & S. J. Beatty, 2009. Ontogenetic depth partitioning by juvenile freshwater sawfish (Pristis microdon: Pristidae) in a riverine environment. Marine and Freshwater Research 60: 306–316.
Whoriskey, K., E. G. Martins, M. Auger-Méthé, L. F. Gutowsky, R. J. Lennox, S. J. Cooke, M. Power & J. Mills Flemming, 2019. Current and emerging statistical techniques for aquatic telemetry data: a guide to analysing spatially discrete animal detections. Methods in Ecology and Evolution 10: 935–948.
Acknowledgements
We gratefully acknowledge the support for EW of the EU LIFE+ Nature and Biodiversity Programme: LIFE14NAT/UK/000054, as well as funding and resource support from the Environment Agency.
Funding
EU LIFE+ Nature and Biodiversity Programme: LIFE14NAT/UK/000054.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
No conflicts of interest.
Ethics approval
All regulated procedures were performed under the UK Home Office project licence 70/8063 and after ethical review.
Additional information
Handling editor: Fernando M. Pelicice
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Winter, E.R., Hindes, A.M., Lane, S. et al. Detection range and efficiency of acoustic telemetry receivers in a connected wetland system. Hydrobiologia 848, 1825–1836 (2021). https://doi.org/10.1007/s10750-021-04556-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10750-021-04556-3