
Abstract
Background
In recent years, large-scale acoustic telemetry observation networks have become established globally to gain a better understanding of the ecology, movements and population dynamics of fish stocks. When studying a species that uses different habitats throughout its life history difficulty may arise where acoustically suboptimal habitats are used, such as shallow, vegetated areas. To test the feasibility of active tracking in these acoustically suboptimal habitats, we quantified detection probability and location error as a function of several environmental variables with two transmitter types in a shallow freshwater embayment.
Results
When placed in nearshore areas (< 1 m deep), the higher-powered transmitter (158 dB) had significantly greater detection probability than the lower-powered transmitter (152 dB). For both transmitter types, detection probability declined at 200 m; however, at the 100 m distance the higher-powered transmitter had greater than 50% detection probability per ping cycle (50.4%) while the lower-powered transmitter was substantially less (29.4%). Additionally, detection probability increased when the transmitter was deployed within sparse, senescent Phragmites spp. vegetation (14%). Estimated positional accuracy of transmitters deployed at known locations (location error) was variable (error range: 13–259 m), and was generally higher for the more powerful transmitter. Location error was minimized when the lower-powered transmitter was located near softened shoreline areas compared to near man-made armored shorelines (i.e., rip-rap).
Conclusion
While benefits exist for maximizing transmitter power (e.g., increased detection range in open-water environments), use of a lower-powered transmitter may be advantageous for active tracking specific locations of fish inhabiting shallow water environments, such as in estuarine tidal marshes and shallow wetlands. Thus, when planning acoustic telemetry studies, researchers should conduct site-specific preliminary detection probability/location error experiments to better understand the utility of acoustic telemetry to investigate fish movements in acoustically suboptimal conditions.
Similar content being viewed by others


Background
Acoustic telemetry has become an increasingly important assessment tool in fisheries research and management, with a near exponential increase in use during recent years [1]. Advances in technology (e.g., smaller transmitters, more powerful and longer-lived battery life, passive receivers) have resulted in this tool being applied to a variety of questions related to the spatial ecology of marine and freshwater fishes [2, 3]. However, acoustic telemetry is not a panacea, and like all sampling gears, it comes with distinct advantages and limitations [2]. For example, the ability of acoustic receivers to detect transmitter signals can be substantively reduced in shallow water (e.g., < 1 m), in areas with high ambient noise, and in environments with dense aquatic vegetation [2]. If study objectives necessitate work in environments with these characteristics, radio telemetry (e.g., [4, 5],) or passive integrated transponders (e.g., [6],) are often utilized. While these other technologies may be better suited in some applications, they also have their own limitations. Passive integrated transponders have short detection distances (< a few meters) and radio transmitters often perform poorly in deep water habitats, and in water with elevated salinity [4]. Additionally, when a species uses a range of habitats including both deep water across large spatial expanses and shallow habitats (e.g., during spawning), acoustic telemetry may be the best option to obtain information in all of these habitats. Examples include alosine and salmonid species that use marine, estuarine, and open lake habitats, but spawn in confined freshwater/estuarine lotic systems.
Large-scale acoustic telemetry observation networks are now established globally [7, 8]. Most of these observation networks are focused in the marine environment, but examples such as the Great Lakes Acoustic Telemetry Observation System (GLATOS; [9]) also exist in large freshwater systems. By linking individual projects together via shared equipment and detection data, the scope of participating projects is greatly expanded [9]. However, in order to achieve an expanded scope through shared data, participating researchers must use compatible telemetry equipment (e.g., operate on similar acoustic frequencies).
Here, we present a case study aimed at evaluating the feasibility of using acoustic telemetry in an environment where it is known to perform sub-optimally (i.e., shallow vegetated embayments [10, 11]). Specifically, our study objectives were to understand the limitations and variables affecting detection probability and associated error in positional estimates obtained from active tracking in a shallow (i.e., < 3 m), freshwater wetland with high- (158 dB) and low-powered (152 dB) acoustic transmitters. Our study was centered around the spawning ecology of Northern Pike (Esox lucius), a phytophilic broadcast-spawning fish that uses shallow wetland habitats during early spring (< 1 m; [12, 13]) to spawn, but post-spawn adults use extensive regions of open-water habitats where they may be detected by the complex GLATOS network.
In the Great Lakes, destruction of wetland habitat and overexploitation have caused Northern Pike populations to decline from historic levels in the early 1900s (e.g., ~ 507,000 kg of commercial harvest from Lake Erie in 1906, [14]) and they have never fully recovered. While a general understanding of Northern Pike spatial and temporal ecology is well-known [13], specific abiotic factors regulating year-class production, particularly in the Great Lakes region, is needed to support restoration efforts. If acoustic telemetry can be used to identify specific areas where Northern Pike spawn in shallow, nearshore areas, then it may be possible to identify the abiotic factors (e.g., water level oscillations, seiches) regulating spawning success and suggest management actions that could be taken to improve habitat conditions.
Methods
Study site
Our study was conducted in a shallow (mean depth = 2 m), 741-ha wetland embayment (East Harbor) of Lake Erie during April 2019. At the time this study was conducted, submerged aquatic vegetation (SAV, Ceratophyllum demersum and Myriophyllum spp.) was dormant and only senescent stalks of Phragmites spp. were present along the shoreline. Similar to water levels across the Great Lakes basin, 2019 was a historically high water year in Lake Erie. These senescent Phragmites spp. stalks were present in water depth up to 0.5 m, which are known to provide suitable egg deposition habitat for Northern Pike in other locales [12]. Although the predominant shoreline habitat consisted of this emergent vegetation, extensive areas of “hardened” shoreline areas (i.e., man-made rip-rap) were also present along the perimeter of East Harbor. These attributes are important because SAV is known to negatively affect acoustic detection [15], and hardened shorelines can interfere with signal location as it will cause code collision issues from the reflected transmissions off the hard substrate which in turn reduces detection efficiency [16].
Detection probability
To estimate detection range of acoustic transmissions in shallow water environments, acoustic transmitters were suspended 30 cm above the substrate to simulate a “tagged” fish. Two transmitters with different power levels were evaluated: low-powered (152 dB, InnovaSea 69 kHz V13-1H, nominal delay = 30–90 s) and high-powered (158 dB, InnovaSea 69 kHz V16-4H, nominal delay = 60–180 s) acoustic transmitters. The high- and low-powered transmitter configurations were selected because they have been used extensively in other Lake Erie GLATOS studies to monitor the broad-scale movements of fishes in tributary and open-water environments [17,18,19,20]. Additionally, we needed to be able to track movement of Northern Pike in open-water areas of Lake Erie where the widely spaced GLATOS receiver grid could be employed effectively. Weather conditions were consistent among trials as we only sampled on fair weather days (i.e., wind speeds < 2.6 m s-1) as we would expect to be optimal for Northern Pike spawning.
Acoustic transmitters were suspended horizontally in the water column via a bouyant polypropylene line and float attached to a concrete anchor mooring rig deployed in water < 1 m deep. Transmitters were placed either inside (0.5 m) or outside (~ 0.5 m) these vegetated areas along the shoreline to determine if this sparse emergent vegetation negatively impacted detection probability. A total of six transmitter deployment locations were used (i.e., three within emergent vegetation, three outside the vegetation; both transmitters at the same locations) in early April. Transmitter detection probability was estimated at distances of 25, 50, 100, and 200 m from deployed transmitters (perpendicular to the shore). At each distance, the boat was anchored (i.e., with multiple anchors) to minimize boat movement. A directional hydrophone (InnovaSea VR100 receiver and VH100 directional hydrophone with a normal filter setting) was pointed at the transmitter for 20 min, and this process was repeated at four hydrophone sensitivity settings (gain values of 0, 6, 12, and 24 dB), for a total of 80 min of sampling at each distance giving us a total of 192 measures of detection probability (6 locations × 4 distances × 4 gain settings × 2 transmitter powers). A supplementally located receiver that was placed near the transmitters did not obtain 100% transmission detection (coding) as there were times the active tracking unit had more detections than the VR2W receiver. Thus, a mean transmission rate and the number of times an acoustic transmission was coded at each distance and gain setting was used to determine the probability of detection. For example, if a low-powered transmitter (mean transmission rate = 1 transmission/minute) was coded by the VR100 16 times within a 20-min period, the detection probability was 0.8 (16 (detections)/20 (expected average detections) = 0.8). We recognize there is variability in the actual number of transmissions in a 20-min period due to the nominal delay (variability in transmission frequency to reduce code interference). The number of actual transmissions varied for each 20-min observation period (up to ± 2). Supplemental analysis of randomly varying the expected number of tag transmissions based on each transmitter’s nominal delay suggested little change in our final results. Therefore, we used average transmission rate values in our analysis of detection probability.
For data visualization and variable selection, a classification and regression tree (CART) model was built (R “rpart” package; [21]) as described by Qian [22] CART is a useful tool in understanding data structure due to its ability to handle both continuous and discrete variables and simplistic visualization where breaks occur. CART analysis also identifies the best partitioning of the results (branching) and includes visualization of likely variable interactions (i.e., one variable on a branch but not on other branches). Factors included in the CART model were transmitter power (152 dB and 158 dB; V13 and V16, respectively), gain setting, depth of transmitter, distance from receiver, and transmitter location (i.e., within or outside vegetation). All factors contributing to detection probability by the CART model were then included in the generalized linear mixed effects modeling. No factors were selected against in this process. Using this approach provided a valuable look at the data structure and potential impacts that variables may have on the models.
A generalized linear mixed effects model with binomial error distribution was used to determine the influence of transmitter power, transmitter depth, receiver gain, distance from the transmitter and proximity to vegetation on detection probability. Individual transmitter deployment location was treated as a random effect. Therefore, each transmitter deployment location had dependent measurements from high- and low-powered transmitters at all gain settings and all four distances. Each location had a single depth associated with all measures as the transmitter was not moved between trials. Nesting random effects caused singularity in complex models; therefore, only the transmitter deployment location was used as a random effect. Interactions were also not included in the model to reduce overfitting the models. Models were built using the “lme4” package in R [23, 24]. Selection occurred by creating a model for every combination of predictors, which were compared using AICc and ΔAICc [25]. Model selection occurred if ΔAICc was 2 less than a less complex model for each additional variable.
Associated error in positional estimates
The gain reduction method [26] was used in a blind study design to assess the accuracy of active tracking to locate acoustically tagged fish in this shallow water environment. The gain reduction method uses a directional hydrophone and involves gradually reducing receiver gain to increase accuracy of location estimates as the mobile receiver is moved closer to the transmitter. Independent crews deployed/relocated acoustic transmitters in East Harbor on four dates during April 2019. Each day, four acoustic transmitters (two high-powered, two low-powered) were moored to the substrate (0.5 m above the bottom) in varying habitat types (i.e., depths and shoreline composition) and the deployment coordinates were recorded using a handheld GPS unit (Garmin78sc, location error ~ ± 3 m). After transmitters were deployed, an independent crew attempted to determine the location of each transmitter via active tracking. First, broad-scale listening stations were established ~ 200 m apart throughout East Harbor in a grid-like pattern similar to the design described by Kraus et al. [27]. Results from the detection range portion of this study guided positioning of the listening stations as they were placed 2 times the longest distance that at least 50% detection probability occurred for both transmitter powers at the highest gain. At each listening station, an omni-directional hydrophone (VH165 InnovaSea) at full gain (48 dB) was used to monitor the vicinity over three-ping cycles (i.e., duration based on programmed transmission delay) to ensure detection of any transmitters in the area. If a transmitter was heard but not coded, additional time (10 min) was spent at that location until it was determined whether or not a transmitter was likely present. If no transmitter was detected, we proceeded to the next listening station. If a transmitter was detected (coded), the omni-directional hydrophone was exchanged for a directional hydrophone. Direction (i.e., orientation) of the transmitter relative to the boat position was determined with the directional hydrophone by systematic rotation of the hydrophone in 90º increments every three-ping cycles until direction was either determined or no pings were coded. After rotating back to the original position (360º), a bisector direction was sampled between each 90º increment and the same method was applied. Typically, by the last direction a ping was at least heard, if not coded. When this occurred, adjustments of < 20º to either side were made to maximize signal strength of received pings. Once direction was determined by maximizing signal strength (dB) of a coded transmitter, we moved in that direction. After each move, the directional hydrophone was first sampled in the same direction as the previous positive direction, and then was systematically rotated to adjust directionality of the next move. As we drew closer to the estimated transmitter location, the gain setting was progressively reduced until the transmitter was coded at 0 dB gain (lowest setting) with a power of at least 85 dB. At this power, the directional hydrophone was assumed to be pointing nearly directly at the transmitter. Once that occurred, the transmitter was triangulated by going to two additional locations. The supplementary locations were taken ~ 30 m to the left and right of the original bearing using the same directionality adjustments as used previously while remaining on 0-dB gain. When signal strength was at least 85db for the other two directions, a GPS point (Garmin etrex 15 ± 3 m location error) was then placed at the triangulated location where the transmitter was estimated to be.
Distance between the predicted and actual locations was calculated using haversine in the “geosphere” package in R [28]. Because we had a relatively small sample size (n = 15); (one transmitter stopped functioning) descriptive statistics of mean and standard error were generated to compare location error between transmitter power and shoreline type, as they appeared to have a large effect on location accuracy. Shoreline type was assessed based on the nearest shoreline to the transmitter and was assigned as either soft (gradual slope with emergent vegetation) or hardened (with rip-rap). Formal statistics and candidate models were not used due to the relatively low sample sizes and potential of overfitting the model.
Results
Detection probability
Our ability to detect acoustic transmitters in shallow water was influenced by all five variables measured: distance to transmitter, transmitter depth, transmitter power, proximity to emergent vegetation (inside vs. outside), and gain setting (CART model, Fig. 1). Distance between the transmitter and receiver was the most important variable evaluated with detection probabilities lower at 200 m than at distances ≤ 100 m. At 200 m, transmitter depth, followed by transmitter power and receiver gain were the most influential variables, while location inside/outside emergent vegetation was not identified as an important variable at this distance. However, at distances ≤ 100 m, transmitter location inside or outside emergent vegetation was the next most important variable identified. The importance of distance to transmitter, transmitter depth from the surface, transmitter power, and receiver gain varied when transmitters were located 25–100 m from the receiver. Relative to all the variables evaluated, the effect of receiver gain was the least influential for detecting acoustic transmissions when ≤ 100 m from the receiver.

Classification and regression tree (CART) results for factors influencing detection probability of acoustic transmissions in a shallow wetland in Lake Erie (average depth ~ 2 m; 192 total observation). Equal number of replicates occured for each distance, gain setting, transmitter power (V13 and V16) and location (inside or outside of sparse and senescent emergent Phragmites spp)
The generalized mixed effects model with a binomial error structure that had the most support (lowest AICc and most parsimonious; Table 1) included only transmitter power (dB), distance between transmitter and receiver, and transmitter location relative to vegetation. This indicated that transmitter depth and gain settings were not important for predicting detection probability of transmitters in this system (Table 2). The high-power transmitter had generally greater detection probability (mean = 12.6%, coefficient = 0.77, SE = 0.36) than the lower-power transmitter, and detection probability decreased with increasing distance from the transmitter (Fig. 2). At the most distant sampling location (200 m), detection probability declined by 40% compared to the detection probability at 25 m (coefficient = − 2.77, SE = 0.64) and was below the 50% threshold for adequate detection probability (58% at 25 m vs 18% at 200 m, Fig. 2). Detection probability was also on average 14% greater within vegetation, as compared to just outside this sparse emergent vegetation (coefficient = 1.80, SE = 0.38, Table 2).

Observed detection probability (proportion) for 152 and 158 dB acoustic transmitters as a function of distance between transmitter and active tracking receiver (VR100). Proportion of detections was based on total detections (coding of transmitter signal) during 20 min of sampling. For each transmitter type (power), detections were made at six transmitter locations associated with stands of senescent emergent Phragmites spp. (three inside (0.5 m) and three outside (0.5 m)) in April 2019. At each location, detections were made at four distances from the transmitter and for four gain settings of the receiver
Error in positional estimates
Considerable variability was observed when estimating acoustic telemetry transmitter locations within East Harbor using the gain reduction method. Across all trials, accuracy (i.e., actual vs. estimated location) ranged between 13 and 259 m. Mean accuracy for low-powered transmitters located on hard and soft shoreline was 85.3 m (n = 6, SE. = 55.4 m) and 25.1 m (n = 2, SE = 7.36), respectively. With the high-powered transmitters location accuracy was 174.40 m (n = 4, SE = 93.3 m) and 71.4 m (n = 3, S.E. = 82.2 m) with hard and soft shoreline, respectively (Fig. 3). The time required to locate each transmitter after initial detection averaged 34.5 min (SE = ± 16.3 min). Consistently, transmitter proximity to hardened shoreline created problems obtaining accurate directional estimates. Formal statistical analysis of the location error results was not completed due to small sample size.

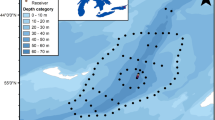
Deviation between actual and estimated transmitter locations achieved using the gain reduction method (and 3-point triangulation) with an active tracking receiver, directional hydrophone (VEMCO VR100), and acoustic transmitters with 152 dB (n = 8) and 158 dB (n = 7) signal strength (V13 and V16, respectively). Transmitters were placed in various locations throughout a shallow wetland in water less than 3 m deep. A naïve locator determined transmitter locations. Hard shoreline substrate included cobble rip-rap, while soft substrates had gradual sand/mud shorelines or emergent vegetation. All data points are indicated by circles
Discussion
Our results suggest that acoustic transmitters can be used in acoustically suboptimal, shallow water environments to achieve specific research objectives, but researchers must be aware of how the physical environment and habitat use of study species influence detection probability and accuracy of positional estimates. While we detected a significant difference in detection probability between the transmitters placed inside vs. outside stands of emergent vegetation (i.e., a positive effect on detection probability of transmitter location in vegetation), this is the opposite observed by others when considering dense submerged aquatic vegetation [10, 11, 15]. In our study system, Phragmites spp. was the dominant emergent vegetation and may not have played a substantive role, as it was not very dense and had a simple structure under the water during our trials. During other times in the year, additional submerged aquatic macrophyte growth would likely impede transmitter signals from reaching the receiver as has been documented elsewhere (e.g., [15]). The positive effect of vegetation presence on detection probability that we observed could be an artifact of the nested nature of our random effects that we could not account for in our efforts to reduce statistical singularity issues. It could also just be statistical noise. However, detection probability was not hindered by the presence of this emergent vegetation (sparse Phragmites spp. stems), and so detection ranges could be generated without needing to account for a vegetation effect in our case. Caution should be made when using our results in planning future studies in other locations.
Quantifying detection probability is an increasingly common practice when designing and conducting passive acoustic telemetry studies (e.g., [29,30,31,32],), yet few active tracking studies address this metric. Kessel et al. [30] reviewed 378 acoustic telemetry studies and only a single study included active tracking methods when evaluating detection probabilities. In that example, active tracking locations were compared to passive receiver detections of tagged fish within an array to estimate detection range [33]. More recently, detection probability was assessed for two different acoustic transmitters in a hydropower reservoir by allowing the active receiver to passively sample while gradually increasing distance from the known transmitter location until detection did not occur [34]. While the underlying questions differed from those in our study, it exemplifies the need to address detection probability in active tracking studies to aid in data interpretation [35]. Our results suggested that detection probability out to 100 m was often about 50% at the highest gain tested (24 dB) even with the less powerful transmitter (i.e., 152 vs 158 dB). Given a 50% detection probability and a 120 s average delay (60–180 s) for such a transmitter, researchers using a 10-min listening window within 100 m of the transmitter would expect a > 87% chance that the transmitter would be detected at least once.
Surprisingly, gain setting did not play a major role in predicting detection probability. It did not appear to have any effect until the greatest distances from the transmitter. Even at the lowest gain, the receiver was capable of detecting these transmitters at fairly substantive distances (~ 200 m). This result may be driven by use of two transmitter types that were both relatively high-power and we may have observed a different outcome had we included an even lower power transmitter (e.g., Vemco V7, 137 dB).
We do suspect that our detection probabilities may have been negatively influenced by close proximity detection interference, where signal transmission echoes interfere with the coding sequence in close proximity to the receiver [36]. We did not test this specifically however, but there were cases in which detection probability was lower at the 25 m distance than at greater distances at the same transmitter location. This can be particularly problematic for higher powered transmitters such as those used here. Therefore, attention must be paid to ensure that reduction of detection probability does not occur when trying to determine fine-scale positioning of transmitters.
Variation in the accuracy of estimated transmitter locations was often greater in our study than previously found [37,38,39]. With our lower-powered transmitters (152 dB) located in close proximity to soft shoreline (i.e., emergent vegetation, tapered beach) where Northern Pike would likely aggregate during spawning [13, 40], we had a tolerable error range (19–34 m). Taylor and Litvak [38] reported triangulation error of 18.44 ± 0.85 m when using 3-point triangulation like we used. They also found that location accuracy increased as the number of directional estimates increased. However, a trade-off exists with increasing time needed to complete additional bearing estimates, especially for a highly mobile species.
In systems dominated with rip-rap or other hard shorelines, acoustic telemetry may be less suited for identifying accurate locations of tagged animals; in these shoreline conditions, we determined high location errors (i.e., > 100 m) for both high and low-power transmitters. Anecdotally, there were times during this study when the directional hydrophone detected a signal reflecting from a rip-rap wall in the opposite direction of the hidden transmitter. While we were able to determine this post hoc, it could lead to erroneous location estimates when active tracking is needed to immediately find the target. There were occasions when detecting a false direction was possible in the field because the signal strength was weaker facing the hard shoreline than in another direction. However, this was not always the case. Although novel methods exist that might accommodate such issues during analysis (e.g., [16]), these are not applicable to active tracking studies when the information is needed immediately. Care should be made to confirm directionality in active tracking studies to avoid a false direction estimate as it could drastically impact location accuracy. This is especially present when tracking species that utilize hardened substrates such as rock reefs or rip-rap walls. In these cases, using a lower power transmitter could reduce positional error, although another method (e.g., radio telemetry) may be more applicable.
Error in positional estimates obtained via active tracking of radio-tagged fishes is much more commonly reported than that for acoustic telemetry (e.g., [26, 41,42,43]). Aerial radio telemetry estimates seem to have slightly worse positional accuracy (22–476 m, [42]), whereas ground tracking can perform slightly better than aerial surveys (1 to 131 m (median = 24 m), [43]) or even substantially better when used in a small stream setting (0.91 m, SD ± 1.4, [26]). It appears that habitat scale can influence location accuracy, as Sullivan et al. [26] found much lower error estimates in small streams compared to the large tributaries sampled by Heim et al. [43]. Sullivan et al. [26] also used the gain reduction method as opposed to triangulation methods. The wetland in our study was not a riverine system, so the results and implications may not be directly comparable; however, there appears to be similar error associated between triangulating radio frequencies and acoustic telemetry in larger systems.
If more accurate positional estimates are needed to identify fine-scale habitat selection than can be provided by the gain reduction method used here, multi-receiver positioning systems that use time difference of signal arrival are available (e.g., Vemco Positioning System). With this method, a set of stationary receivers work in unison to measure travel time of acoustic signals to determine location of transmitters with a high level of accuracy (i.e., observed error rates of 1.3–9.7 m; [44,45,46]). However, performance of these positional arrays can vary extensively. Detection probability and positional accuracy was worse in littoral areas than in pelagic areas of two small (< 25 ha) European lakes [12]. Additionally, Binder et al. [47] attributed high spatial and temporal variability in detection to environmental factors such as seasonality, thermal stratification, depth and wave height, as well as transmitter density within the array, as did Steel et al. [46]. Importantly, when using a multi-receiver positioning system, location estimation is not immediately available as receiver data must be downloaded and processed; therefore, collecting habitat variables would need to be conducted post hoc when habitat may have changed depending on the lag time in analysis.
Ultimately, a clear trade-off exists in our effort to accurately locate spawning Northern Pike in shallow wetlands and monitor their movements when in more open-water environments (e.g., main basin of Lake Erie) during non-spawning periods. Specifically, the need to balance accuracy during active tracking while maximizing detection range during non-spawning periods requires carefully considering a transmitter’s power level and transmission rate. Higher power transmitters will be detected at longer ranges in the main lake environment but are more difficult to accurately position in shallow wetlands. Similarly, a shorter delay between transmissions may increase the odds of successfully locating a spawning individual but decrease battery life and limit the longevity of tracking during spawning and non-spawning periods. Based on results from this study and the need to track Northern Pike across multiple years in spawning and non-spawning periods, we elected to deploy 152-dB transmitters with an average transmission rate of 60 s during the spawning period and 300 s for the rest of the year, with an estimated battery life of 903 days. These specifications will allow us to track tagged individuals for multiple spawning seasons and identify spawning habitat with minimal location error, while also provide broad-scale movement information of the species using the existing GLATOS array.
Conclusions
The use of acoustic telemetry is an applicable method in shallow freshwater embayments despite its known shortcomings. When active tracking and the gain reduction method are utilized, positional estimates can have similar accuracy to radio telemetry in similar-sized systems except when shorelines are dominated by hardened rip-rap or breakwalls. A trade-off does occur as lower-powered transmitters result in more accurate positional estimates, but detection range is reduced. Therefore, assessment of research project goals should be conducted prior to implanting fishes for tracking. A priori detection range and location error testing should occur in individual systems to ensure applicability of acoustic telemetry to meet the needs of the research goals.
Availability of data and materials
The datasets used and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Hussey NE, Kessel ST, Aarestrup K, Cooke SJ, Cowley PD, Fisk AT, Harcourt RG, Holland KN, Iverson SJ, Kocik JF, Mills Flemming JF, Whorlskey FG. Aquatic animal telemetry: a panoramic window into the underwater world. Science. 2015;2015(348):1255642. https://doi.org/10.1126/science.1255642.
Cooke SJ, Midwood JD, Thiem JD, Kimley P, Lucas MC, Thorstad EB, Eiler J, Holbrook C, Ebner BC. Tracking animals in freshwater with electronic tags: past present and future. Animal Biotelemetry. 2013;1:1. https://doi.org/10.1186/2050-3385-1-5.
Crossin GT, Heupel MR, Holbrook CH, Hussey NE, Lowerre-Barieri SK, Nguyen VM, Raby GD, Cooke SJ. Acoustic telemetry and fisheries management. Ecol Appl. 2017;27:1031–49.
Koehn JD. Design in studies based on acoustic or radio telemetry. Bethesda, Maryland: Telemetry Techniques A User Guide for Fisheries Research. American Fisheries Society; 2012.
Pierce RB. Oviduct insertion of radio transmitters as a means of locating northern pike spawning habitat. North Am J Fish Manag. 2004;24:244–8.
Koehn JD, Eiler JH, McKenzie JA, O’Connor WG. An improved method for obtaining fine scale location of radio tags when tracking by boat. Am Fish Soc Symp. 2012;76:379–84.
Cahill CL, Howland KL, Hulsman MF, Noddin F, Tonn WM, Courtice G, Zhu DZ. Arctic grayling movements through a nature-like fishpass in northern Canada. Trans Am Fisheries Soc. 2016;145:951–63.
Cooke SJ, Iverson SJ, Stokesbury MJW, Hinch SG, Fisk AT, VanderZwaag DL, Apostle R, Whoriskey F. Ocean tracking network Canada: a network approach to addressing critical issues in fisheries and resource management with implications for ocean governance. Fisheries. 2011;36:583–92.
Ellis RD, Flaherty-Walia KE, Collins AB, Bickford JW, Boucek R, Walters Burnsed SL, Lowerre-Barbieri SK. Acoustic telemetry array evolution: from species and project specific designs to large scale multispecies, cooperative networks. Fish Res. 2019;209:186–95.
Krueger CC, Holbrook CM, Binder TR, Vandergoot CS, Hayden TA, Hondorp DW, Nate N, Paige K, Riley SC, Fisk AT, Cooke SJ. Acoustic telemetry observation systems: challenges encountered and overcome in the Laurentian Great Lakes. Can J Fish Aquat Sci. 2018;75:1755–63.
Zamora L, Moreno-Amich R. Quantifying the activity and movement of perch in a temperate lake by integrating acoustic telemetry and a geographic information system. Hydrobiologia. 2002;483:209–12.
Baktoft H, Zajicek P, Klefoth T, Svendsen JC, Jacobsen L, Pedersen MW, Morla DM, Skov C, Nakayama S, Arlinghaus R. Performance assessment of two whole-lake acoustic positional telemetry systems—is reality mining of free ranging aquatic animals technologically possible? PLoS ONE. 2015;10:e0126534. https://doi.org/10.1371/journal.pone.0126534.
Casselman JM, Lewis CA. Habitat requirements of northern pike. Can J Fish Aquat Sci. 1996;53:161–74.
Pierce RB. Northern Pike ecology, conservation and management history. University of Minnesota. 2012. ISBN 978-0-8166-7954-6.
Clark CF. Movements of Northern Pike tagged in waters tributary to Lake Erie. Ohio J Sci. 1990;90:41–5.
Weinz AA, Matley JK, Klinard NV, Fisk AT, Colborne SF. Performance of acoustic telemetry in relation to submerged aquatic vegetation in a nearshore freshwater habitat. Mar Freshw Res. 2020. https://doi.org/10.1071/MF20245.
Vergeynst J, Vanwyck T, Baeyens R, De Mulder T, Mopens I, Mouton A, Pawels I. Acoustic positioning in a reflective environment: going beyond point-by-point algorithms. Animal Biotelemetry. 2020;8:16. https://doi.org/10.1186/s40317-020-00203-1.
Raby GD, Vandergoot CS, Hayden TA, Faust MD, Kraus RT, Dettmers JM, Cooke SJ, Zhao Y, Fisk AT, Krueger CC. Does behavioural thermoregulation underlie post-spawning migrations in a freshwater teleost. Can J Fish Aquat Sci. 2018;75:488–96.
Slagle ZJ, Faust MD, Keretz KR, DuFour MR. Post-tournament dispersal of smallmouth bass in western Lake Erie. J Great Lakes Res. 2020;46:198–206.
Harris C, Brenden TO, Vandergoot CS, Faust MD, Herbst SJ, Krueger CC. Tributary use and large-scale movements of grass carp in Lake Erie. J Great Lakes Res. 2020;47:48–58.
Therneau T, Atkinson B. rpart: Recursive Partitioning and Regression Trees. R package version 4.1–15. 2019. https://CRAN.R-project.org/package=rpart.
Qian S. Environmental and Ecological statistics in R, 2 edn. CRC Press Taylor and Francis Group. 2017. ISBN 13: 978-1-4987-2872-0.
Bates D, Maechler M, Bolker B, Walker S. Fitting linear mixed-effects models using lme4. J Stat Softw. 2015;67:1–48.
R Core Team. R: A language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria. 2019. https://www.R-project.org/.
Burnham KP, Anderson DR. Model selection and multimodel inference. 2nd ed. New York: Springer; 2002.
Sullivan BG, Clarke SH, Struthers DP, Taylor MK, Cooke SJ. The gain reduction method for manual tracking of radio-tagged fish in streams. Animal Biotelemetry. 2019;7:6. https://doi.org/10.1186/s40317-019-0168-4.
Kraus RT, Holbrook CM, Vandergoot CS, Stewart TR, Faust MD, Watkinson D, Charles C, Pegg M, Enders E, Krueger CC. Evaluation of acoustic telemetry grids for determining aquatic animal movement and survival. Methods Ecol Evol. 2018;9:1489–1452.
Hijmans RJ. geosphere: spherical trigonometry. R package version 1.5–7. 2019; https://CRAN.R-project.org/package=geosphere.
Gjelland KO, Hedger RD. Environmental influence on transmitter detection probability in biotelemetry: developing a general model of acoustic transmission. Methods Ecol Evol. 2013;4:665–74.
Kessel ST, Cooke SJ, Heupel MR, Hussey NE, Simpfendorfer CA, Vagle S, Fisk AT. A review of detection range testing in aquatic passive acoustic telemetry studies. Rev Fish Biol Fisheries. 2012;24:199–218.
Hayden TA, Holbrook CM, Binder TR, Dettmers JM, Cooke SJ, Vandergoot CS, Kreuger CC. Probability of acoustic transmitter detections by receiver lines in Lake Huron: results of multi-year field tests and simulations. Aminal Biotelemetry. 2016;4:19. https://doi.org/10.1186/s40317-016-0112-9.
Brownscombe JW, Griffin LP, Chapman JM, Morley D, Acosta A, Crossin GT, Iverson SJ, Adams AJ, Cooke SJ, Danylchuk AJ. A practical method to account for variation in detection range in acoustic telemetry arrays to accurately quantify the spatial ecology of aquatic animals. Methods Ecol Evol. 2020;11:82–94.
Kerwath SE, Gotz A, Attwood CG, Sauer WHH, Wilke CG. Area utilisation and activity patterns of roman, Chrysoblephus laticeps (Sparidae), in a small marine protected area. Afr J Mar Sci. 2007;29:259–70.
Babin A, Fitzpatrick L, Linnansaari T, Curry RA. Detection range of acoustic recievers in a large hydropower reservoir. Fishes. 2019;4:60. https://doi.org/10.3390/fishes4040060.
Payne NL, Gillanders BM, Webber DM, Semmens JM. Interpreting diel activity patterns from acoustic telemetry: the need for controls. Mar Ecol Prog Ser. 2010;419:295–301.
Kessel ST, Hussel NE, Webber DM, Gruber SH, Young JM, Smale MJ, Fisk AT. Close proximity detection interference with acoustic telemetry: the importance of considering tag power output in low ambient noise environments. Animal Biotelemetry. 2015;3:5. https://doi.org/10.1186/s40317-015-0023-1.
Welsh JQ, Bellwood DR. Spatial Ecology of the steephead parrot fish (Chlorurus microrhinos): an evaluation using acoustic telemetry. Coral Reefs. 2012;31:55–65.
Taylor AD, Litvak MK. Quantifying a manual triangulation technique for aquatic ultrasonic telemetry. North Am J Fisheries Manag. 2015;35:865–70.
Fetterplace LC, Davis LC, Neilson JM, Taylor MD, Knott NA. Active acoustic tracking suggest that soft sediment fishes can show site attachment: a preliminary assessment of the movement patterns of the blue-spotted flathead (Platycephalus caeruleopunctatus). Animal Biotelemetry. 2016;4:15. https://doi.org/10.1186/s40317-016-0107-6.
Foubert A, Le Pichon C, Mingelbier M, Farrell J, Morin J, Lecomte F. Modeling the effective spawning and nursery habitats of northern pike within a large spatiotemporally variable river landscape (St. Lawrence River, Canada). Limnol Oceanography. 2019;64:803–19.
James DA, Erickson JW, Barton BA. Using a geographic information system to assess the accuracy of radio-triangulation techniques for fish telemetry. North Am J Fish Manag. 2003;23:1271–5.
Roberts JJ, Rahel FJ. Accuracy of aerial telemetry in fisheries studies. North Am J Fish Manag. 2004;25:660–6.
Heim KC, Steeves ME, McMahon TE, Ertel BD, Koel TM. Quantifying uncertainty in aquatic telemetry: using received signal strength to estimate telemetry error. North Am J Fish Manag. 2018;38:979–90.
Espinoza M, Farrugia TJ, Webber DM, Smith F, Lowe CG. Testing a new acoustic telemetry technique to quantify long-term, fine-scale movements of aquatic animals. Fish Res. 2011;108:364–71.
Roy R, Beguin J, Argillier C, Tissot L, Smith F, Smedbol S, De-Oliveira E. Testing the VEMCO Positioning System: spatial distribution of the probability of location and the positioning error in a reservoir. Animal Biotelemetry. 2014;2:1. https://doi.org/10.1186/2050-3385-2-1.
Steel AE, Coates JH, Hearn AR, Klimley AP. Performance of an ultrasonic telemetry positioning system under varied environmnetal conditions. Animal Biotelemetry. 2014;2:15. https://doi.org/10.1186/2050-3385-2-15.
Binder TR, Holbrook CM, Hayden TA, Krueger CC. Spatial and temporal variation in positioning probability of acoustic telemetry arrays: fine-scale variability and complex interactions. Animal Biotelemetry. 2016;4:4. https://doi.org/10.1186/s40317-016-0097-4.
Acknowledgements
This work was funded by the Great Lakes Fishery Commission (Grant ID #2013_BIN_44024) by way of Great Lakes Restoration Initiative appropriations (Grant ID #GL-00E23010). This paper is contribution 82 of the Great Lakes Acoustic Telemetry Observation System (GLATOS). Zak Slagle provided a helpful review of an earlier version of this manuscript.
Funding
This work was funded by the Great Lakes Fishery Commission (Grant ID #2013_BIN_44024) by way of Great Lakes Restoration Initiative appropriations (Grant ID #GL-00E23010). Bowling Green State University funded NDS on a summer research assistantship to complete the analyses, while the Aquatic Ecology and Fisheries Lab at BGSU provided field equipment to aid in sampling.
Author information
Authors and Affiliations
Contributions
NDS was the primary researcher on the project and performed most of the data collection, analysis and manuscript writing. MDF and CSV were critical in project design and development as well as manuscript editing and deploying the hidden transmitters. JGM is the advisor of NDS and worked closely throughout the process with NDS on all aspects of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. The Creative Commons Public Domain Dedication waiver (http://creativecommons.org/publicdomain/zero/1.0/) applies to the data made available in this article, unless otherwise stated in a credit line to the data.
About this article

Cite this article
Stott, N.D., Faust, M.D., Vandergoot, C.S. et al. Acoustic telemetry detection probability and location accuracy in a freshwater wetland embayment. Anim Biotelemetry 9, 19 (2021). https://doi.org/10.1186/s40317-021-00243-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40317-021-00243-1