
Abstract
In this article, an efficient analytical technique, called Laplace–Adomian decomposition method, is used to obtain the solution of fractional Zakharov– Kuznetsov equations. The fractional derivatives are described in terms of Caputo sense. The solution of the suggested technique is represented in a series form of Adomian components, which is convergent to the exact solution of the given problems. Furthermore, the results of the present method have shown close relations with the exact approaches of the investigated problems. Illustrative examples are discussed, showing the validity of the current method. The attractive and straightforward procedure of the present method suggests that this method can easily be extended for the solutions of other nonlinear fractional-order partial differential equations.
Similar content being viewed by others

1 Introduction
Over the past decade, fractional differential equations (FDEs) have gained a lot of attention of researchers due to their ability to enhance real-world issues, used in various fields of engineering and physics. Numerous physical marvels in signal processing, chemical physics, electrochemistry of corrosion, probability and statistics, acoustics and electromagnetic are precisely modeled by DEs of fractional order [1]. Nonlinear partial differential equations (PDEs) can be considered the generalization of the differential equations of integer order [2]. In the modern age it is impossible to imagine modeling of many real world problems without using fractional partial differential equations (FPDEs). Indeed, fractional calculus can be called this century’s calculus [3] because of the diversity of applications in different areas of science and technology. Many numerical and analytical techniques have been suggested for the solutions of linear and nonlinear FPDEs [3]. Some emerging analytical approximate approaches for FDEs are homotopy analysis method (HAM) [4], variational iteration method (VIM) [5], generalized fractional Taylor series method [6,7,8,9], iterative fractional power series system to solve a number of fractional integro-differential equations [10]; using the Kudryashov technique and trial solution technique, we obtained traveling wave approaches to a fractional, nonlinear Schrodinger problem [11,12,13]; analytical solution to solve a particular homogeneous time-invariant fractional original value problem [14]; Taylor power series solution method is used to obtain approximate 2D time-space fractional diffusion, wave-like, telegraph, time-fractional Phi-4 equation, and Burger models from both closed-form and supportive series alternatives [15, 16]; fractional temporal evolution of optical solitons [17], fractional generalized reaction Duffing model by generalized projective Riccati equation method [18], ternary-fractional differential transform [19], Adomian decomposition method (ADM) [20], and homotopy perturbation method (HPM) [21].
The Korteweg–de Vries (KdV) equations play a vital role in application of sciences. One of the notorious variations is the equations of Zakharov–Kuznetsov (ZK), the electrostatic-acoustic pulses are analyzed in magnetized ions. It is an ocean-based coastal waves investigation [3]. The ZK equation was initial obtained in the study of weak nonlinear acoustic ion waves that significantly attract two-dimensional ion losses. In the present work, we investigate the following fractional ZK equation:
where \(u=u(x_{1},y_{1},t_{1})\), γ is the parameter defining the structure of the fractional derivative \((0<{\gamma }{\leq 1})\), and \(\theta , \psi \), and τ are random constants [1]. \(\eta , \rho \), and κ are integers responsible for the conduct of weak nonlinear acoustic ion vibrations in a plasma comprising cool ions and hot exothermic electrons in the systematic electric field [22].
Some successful analytical approaches for the well-known ZK equation are perturbation iteration algorithm and continuous power series technique [22]. Nonlinear fractional ZK calculation in two dimensions was discussed numerically in [23] using a new iteration Sumudu transform method (NISTM). Exact solutions for traveling waves were obtaine in [3] using the functional variable method for the first time. Another new method for \(G^{\prime }/G\)-expansion was studied in [24, 25]. A modified ZK equation successfully was obtained by the homogeneous balance method [26] and the Riccati sub-equation technique was used to approximate a Zakharov–Kuznetsov fractional model [27, 28]. The first integral method was suggested in [29] for modified KdV-ZK equations. Analytical results of ZK equation were obtained in [22] using the homotopy perturbation method. Solution of ZK equation was studied in [30] using the mapping and ansatz methods. Perusing the above development, contributed by many researchers, in this paper we discuss a new analytical approach, i.e., the Laplace–Adomian decomposition technique.
George Adomian introduced a modern mathematical method to solve nonlinear differential equations in the 1980s described as Adomian decomposition method (ADM) [31]. Similarly, another powerful method found by Pierre-Simon Laplace to solve PDEs was described as the Laplace transformation technique that transforms the initial DEs into a mathematical expression [32]. The technique of Laplace–Adomian decomposition method (LADM) is the appropriate analytical approach for determining nonlinear FPDEs. LADM is a mixture of two strong techniques: ADM and Laplace transform (LT). This method is considered to be suitable for those equations that define nonlinear models. LADM has smaller parameters compared to other analytical methods, so LADM is the best method, not needing discretion and linearization [33]. A comparison for the assessment of FPDEs between the LADM and ADM is mentioned in [34]. In the modern physics, the Kundu–Eckhaus solution deals with the analytical approach of these nonlinear PDEs using LADM in [31]. Multi-step LADM was defined for nonlinear FDEs in [35]. A fractional-order smoke scheme and Korteweg–de Vries equation evaluation have been effectively analyzed using LADM [36, 37]. In the time fractional multi-dimensional Navier–Stokes models, third-order dispersive equations and telegraph equations has been solved by Laplace–Adomian decomposition method [38,39,40]. In this paper, motivated by the above research, we extend LADM to solve the model of fractional ZK problems [1].
2 Preliminaries
Definition 2.1
The Laplace transformation of \(q({t_{1}})\), \({t_{1}}>{0}\), is represented as
Definition 2.2
The Laplace transform in a form of convolution is as follows:
here \(q_{1} * q_{2}\) defines the convolution between \(q_{1}\) and \(q_{2}\),
Laplace transform is a fractional derivative
where \(Q(s)\) is the Laplace transformation of \(q(t_{1})\).
Definition 2.3
(Riemann–Liouville fractional integral [41, 42])
where Γ represents the gamma function as
Definition 2.4
The following mathematical expression is given to the Caputo of fractional derivative of order γ for \({m} \in \mathbb{{N}}\), \(x_{1}>0\), \(g \in {\mathbb{C}_{t_{1}}}\), \(t_{1}\geq -1\):
Lemma 2.5
If \({m-1}<\gamma \leq {m}\)with \({m} \in \mathbb{N}\)and \({g} \in {\mathbb{C}_{t_{1}}}\)with \(t_{1}\geq {-1}\), then [43]
Definition 2.6
Function of Mittag-Leffler \(E_{\gamma }(b)\) for \(\gamma >0\) is defined as follows:
3 The procedure of LADM
In this section, the LADM is discussed for the solution of fractional nonlinear nonhomogeneous PDEs.
where \(D^{\gamma }=\frac{\partial ^{\gamma }}{\partial {t_{1}^{\gamma }}}\) the operator of Caputo, in which L and N are operators.
With the initial guess
and using the Laplace transform differentiation property
using the Laplace transform differentiation property, we get
The given infinite series represents the LADM solution of \(\nu (x_{1},y _{1},t_{1})\) as
The nonlinear term in the problem can be expressed in terms of Adomian polynomial as follows:
Substituting Eq. (5) and Eq. (6) in Eq. (4), we get
Applying the Laplace transform linearity, we have
Usually, we will write as follows:
Transforming the inverse Laplace in Eq. (9)
4 Numerical results
Example 1
Consider the following equation of FZK (\(2,2,2\)):
the initial condition is
where η is an arbitrary constant.
Taking Laplace transform of Eq. (11), we obtain
Applying the inverse Laplace transform, we have
Using the ADM procedure, we get
where \(N(\nu )\) is Adomian polynomial representing nonlinear terms in the above equations.
Adomian polynomials are given as follows:
for \(j=0,1,2,\ldots\) .

The subsequent terms are

The LADM solution is

For \(\gamma =1\),
Example 2
Consider the following equation of FZK (\(3,3,3\)):
with the initial condition
where η is an arbitrary constant.
Taking the Laplace transform of Eq. (17), we have
Applying the inverse Laplace transform leads to
Using the ADM procedure, we get
where \(N(\nu )\) is an Adomian polynomial representing nonlinear terms in the above equations.
Adomian polynomials are given as follows:
for \(j=0,1,2,\ldots\) .
The subsequent terms are
The LADM solution is
For \(\gamma =1\),
5 Result and discussion
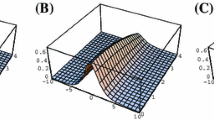
Figure 1 (a) and (b) represent the exact and LADM solutions of Example 1 respectively. Both of the graphs are almost identical and confirm the strong agreement of both exact and LADM solutions. In Fig. 2, the plots c and d show the LADM solutions of Example 1 at fractional order \(\gamma =0.75,0.55\). The fractional-order solutions analyze different fractional views of Example 1. In Fig. 3, the fractional-order solutions at fractional-order \(\gamma =0.25,0.50,0.75,0.9,1\) are plotted for \(x_{1}=y_{1}=1\) see Table 1. Thus analysis has absorbed the asymptotic behaviour of the effect of ascending varying the fractional order. It is investigated that as the fractional-order approaches integer-order, the solution of fractional-order problems converges to the solution of integer-order problem. The procedure and analysis can be represented in Figs. 4 and 5 (see also Table 2) for Example 2.

The (a) exact and (b) LADM solutions of \(\nu (x_{1},y_{1},t_{1})\) of Example 1, at \(\gamma =1\)

The LADM solution of \(\nu (x_{1},y_{1},t_{1})\) of Example 1, at (c) \(\gamma =0.75\) and (d) \(\gamma =0.55\)

The LADM solution of \(\nu (x_{1},y_{1},t_{1})\) of Example 1 for different value of γ

The (a) exact and (b) LADM solutions of \(\nu (x_{1},y_{1},t_{1})\) of Example 2, at \(\gamma =1\)

The LADM solution of \(\nu (x_{1},y_{1},t_{1})\) of Example 2, at (c) \(\gamma =0.75\) and (d) Absolute Error
6 Conclusion
We have investigated the analytical solution of fractional Zakharov–Kuznetsov equations using the Laplace–Adomian decomposition method. The procedure of the proposed method is found to be reliable as compared to other analytical methods because of its small number of calculations. The procedure is much understandable to the readers because it consists of the direct implementation of the Laplace transform to the given problem and then applying the Adomian decomposition method. The inverse Laplace transform is then applied to obtain the analytical solution for the given problem. Illustrative examples are also presented to support the theoretical procedure of the suggested method. For this purpose, we plot four graphs, namely Figs. 1, 2, 3, and 4, to show the agreement of the obtained results and exact solutions for the problems. The display of the figures has confirmed that the results obtained by the present method are in good agreement with the exact solution of Example 1 and 2 in the paper. Moreover, the plot of absolute error has been drawn and discussed in the paper. It shows that even considering two terms of the series solution of the presented method, it provided sufficient accuracy to the solution for the problem. Thus, the proposed method is considered to be a suitable analytical technique to solve the fractional partial differential equations and a system of fractional partial differential equations.
References
Kumar, D., Singh, J., Kumar, S.: Numerical computation of nonlinear fractional Zakharov–Kuznetsov equation arising in ion-acoustic waves. J. Egypt. Math. Soc. 22(3), 373–378 (2014)
Guner, O., Aksoy, E., Bekir, A., Cevikel, A.C.: Various Methods for Solving Time Fractional KdV–Zakharov–Kuznetsov Equation. In: AIP Conference Proceedings, vol. 1738. AIP, New York (2016)
Cenesiz, Y., Tasbozan, O., Kurt, A.: Functional variable method for conformable fractional modified KdV–ZK equation and Maccari system. Tbil. Math. J. 10(1), 118–126 (2017)
Liao, S.: Homotopy Analysis Method in Nonlinear Differential Equations.Higher education press, Beijing (2012)
Wazwaz, A.M.: The variational iteration method for solving linear and nonlinear ODEs and scientific models with variable coefficients. Centr. Eur. Jo. Eng. 4(1), 64–71 (2014)
Alquran, M., Al-Khaled, K., Sivasundaram, S., Jaradat, H.M.: Mathematical and numerical study of existence of bifurcations of the generalized fractional Burgers–Huxley equation. Nonlinear Stud. 24(1), 235–244 (2017)
Jaradat, I., Alquran, M., Al-Khaled, K.: An analytical study of physical models with inherited temporal and spatial memory. Eur. Phys. J. Plus 133(4), 162 (2018)
Alquran, M., Jaradat, I.: A novel scheme for solving Caputo time-fractional nonlinear equations: theory and application. Nonlinear Dyn. 91(4), 2389–2395 (2018)
Ali, M., Alquran, M., Jaradat, I.: Asymptotic-sequentially solution style for the generalized Caputo time-fractional Newell–Whitehead–Segel system. Adv. Differ. Equ. 2019(1), 70 (2019)
Jaradat, I., Al-Dolat, M., Al-Zoubi, K., Alquran, M.: Theory and applications of a more general form for fractional power series expansion. Chaos Solitons Fractals 108, 107–110 (2018)
Eslami, M.: Exact traveling wave solutions to the fractional coupled nonlinear Schrodinger equations. Appl. Math. Comput. 285, 141–148 (2016)
Eslami, M.: Trial solution technique to chiral nonlinear Schrodinger’s equation in (1+2)-dimensions. Nonlinear Dyn. 85(2), 813–816 (2016)
Eslami, M., Neirameh, A.: New exact solutions for higher order nonlinear Schrödinger equation in optical fibers. Opt. Quantum Electron. 50(1), 47 (2018)
Jaradat, I., Alquran, M., Al-Dolat, M.: Analytic solution of homogeneous time-invariant fractional IVP. Adv. Differ. Equ. 2018(1), 143 (2018)
Jaradat, I., Alquran, M., Abdel-Muhsen, R.: An analytical framework of 2D diffusion, wave-like, telegraph, and Burgers’ models with twofold Caputo derivatives ordering. Nonlinear Dyn. 93(4), 1911–1922 (2018)
Alquran, M., Jaradat, H.M., Syam, M.I.: Analytical solution of the time-fractional Phi-4 equation by using modified residual power series method. Nonlinear Dyn. 90(4), 2525–2529 (2017)
Rezazadeh, H., Osman, M.S., Eslami, M., Ekici, M., Sonmezoglu, A., Asma, M., Othman, W.A.M., Wong, B.R., Mirzazadeh, M., Zhou, Q., Biswas, A.: Mitigating Internet bottleneck with fractional temporal evolution of optical solitons having quadratic–cubic nonlinearity. Optik 164, 84–92 (2018)
Rezazadeh, H., Korkmaz, A., Eslami, M., Vahidi, J., Asghari, R.: Traveling wave solution of conformable fractional generalized reaction Duffing model by generalized projective Riccati equation method. Opt. Quantum Electron. 50(3), 150 (2018)
Yousef, F., Alquran, M., Jaradat, I., Momani, S., Baleanu, D.: Ternary-fractional differential transform schema: theory and application. Adv. Differ. Equ. 2019(1), 197 (2019)
Sánchez Cano, J.A.: Adomian decomposition method for a class of nonlinear problems. ISRN Appl. Math. 2011 Article ID 709753 (2011)
Hemeda, A.A.: Homotopy perturbation method for solving systems of nonlinear coupled equations. Appl. Math. Sci. 6(96), 4787–4800 (2012)
Şenol, M., Alquran, M., Kasmaei, H.D.: On the comparison of perturbation-iteration algorithm and residual power series method to solve fractional Zakharov–Kuznetsov equation. Results Phys. 9, 321–327 (2018)
Prakash, A., Kumar, M., Baleanu, D.: A new iterative technique for a fractional model of nonlinear Zakharov–Kuznetsov equations via Sumudu transform. Appl. Math. Comput. 334, 30–40 (2018)
Shakeel, M., Mohyud-Din, S.T.: New \((\acute{G}/G)\)-expansion method and its application to the Zakharov–Kuznetsov–Benjamin–Bona–Mahony (ZK–BBM) equation. J. Assoc. Arab Univ. Basic Appl. Sci. 18, 66–81 (2015)
Mirzazadeh, M., Eslami, M., Biswas, A.: Soliton solutions of the generalized Klein–Gordon equation by using G/G’-expansion method. Comput. Appl. Math. 33(3), 831–839 (2014)
Eslami, M., Mirzazadeh, M.: Exact solutions of modified Zakharov–Kuznetsov equation by the homogeneous balance method. Ain Shams Eng. J. 5(1), 221–225 (2014)
Khodadad, F.S., Nazari, F., Eslami, M., Rezazadeh, H.: Soliton solutions of the conformable fractional Zakharov–Kuznetsov equation with dual-power law nonlinearity. Opt. Quantum Electron. 49(11), 384 (2017)
Liu, J.G., Eslami, M., Rezazadeh, H., Mirzazadeh, M.: Rational solutions and lump solutions to a non-isospectral and generalized variable-coefficient Kadomtsev–Petviashvili equation. Nonlinear Dyn. 95(2), 1027–1033 (2019)
Baleanu, D., Kılıç, B., Uğurlu, Y., Inc, M.: The first integral method for the (\(3+1\))-dimensional modified Korteweg-de Vries–Zakharov–Kuznetsov and Hirota equations (2015)
Krishnan, E.V., Biswas, A.: Solutions to the Zakharov–Kuznetsov equation with higher order nonlinearity by mapping and ansatz methods. Phys. Wave Phenom. 18(4), 256–261 (2010)
González-Gaxiola, O.: The Laplace–Adomian decomposition method applied to the Kundu–Eckhaus equation (2017). arXiv:1704.07730
Alhendi, F.A., Alderremy, A.A.: Numerical solutions of three-dimensional coupled Burgers’ equations by using some numerical methods. J. Appl. Math. Phys. 4(11), 2011–2030 (2016)
Jafari, H., Khalique, C.M., Nazari, M.: Application of the Laplace decomposition method for solving linear and nonlinear fractional diffusion–wave equations. Appl. Math. Lett. 24(11), 1799–1805 (2011)
Mohamed, M.Z.: Comparison between the Laplace decomposition method and Adomian decomposition in time-space fractional nonlinear fractional differential equations. Appl. Math. 9(04), 448 (2018)
Al-Zurigat, M.: Solving nonlinear fractional differential equation using a multi-step Laplace Adomian decomposition method. An. Univ. Craiova-Mat. Comput. Sci. Ser. 39(2), 200–210 (2012)
Haq, F., Shah, K., ur Rahman, G., Shahzad, M.: Numerical solution of fractional order smoking model via Laplace Adomian decomposition method. Alex. Eng. J. 57(2), 1061–1069 (2018)
Shah, R., Khan, H., Kumam, P., Arif, M.: An analytical technique to solve the system of nonlinear fractional partial differential equations. Mathematics 7(6), 505 (2019)
Mahmood, S., Shah, R., Arif, M.: Laplace Adomian decomposition method for multi dimensional time fractional model of Navier–Stokes equation. Symmetry 11(2), 149 (2019)
Khan, H., Shah, R., Baleanu, D., Arif, M.: An efficient analytical technique, for the solution of fractional-order telegraph equations. Mathematics 7(5), 426 (2019)
Shah, R., Khan, H., Arif, M., Kumam, P.: Application of Laplace–Adomian decomposition method for the analytical solution of third-order dispersive fractional partial differential equations. Entropy 21(4), 335 (2019)
Miller, K.S., Ross, B.: An introduction to the fractional calculus and fractional differential equations (1993)
Hilfer, R.: Applications of Fractional Calculus in Physics. World Sci., River Edge (2000)
Podlubny, I.: Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications, vol. 198. Elsevier, Amsterdam (1998)
Acknowledgements
The authors thank the editor and anonymous reviewers for their valuable suggestions, which substantially improved the quality of the paper.
Availability of data and materials
Not applicable.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
The authors declare that this study was accomplished in collaboration with the same responsibility. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that there are no conflicts of interest regarding the publication of this article.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Shah, R., Khan, H., Baleanu, D. et al. A novel method for the analytical solution of fractional Zakharov–Kuznetsov equations. Adv Differ Equ 2019, 517 (2019). https://doi.org/10.1186/s13662-019-2441-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-019-2441-5