
Abstract
In the present paper, a new partial differential equation has been obtained to describe the Rossby solitary waves with complete Coriolis force by employing multi-scale analysis and perturbation method, we call it combined ZK-mZK equation. The equation can reflect the propagation of Rossby waves on the plane and is more appropriate for the real ocean and atmosphere than the \((1+1)\) dimensional models (such as KdV and mKdV), which can only represent the propagation of Rossby solitary waves in a line. Furthermore, by adopting the multiplier method, we construct conservation laws of the combined ZK-mZK equation, which is meaningful for researching the global stability of solutions. Finally, we deduce the exact solutions of the combined ZK-mZK equation via the semi-inverse variational principle. By applying these exact solutions, some propagation features of Rossby solitary waves are analyzed.
Similar content being viewed by others
1 Introduction
The Rossby waves on behalf of huge vortices which exist in the ocean and atmosphere play an increasingly significant role in transporting energy, which can determine the weather and climate change in the earth to a large extent [1–3]. In the last few decades , the research on constructing mathematical models to study the generation and evolution of Rossby waves has attracted a lot of attention, and a series of mathematical models, such as KdV [4, 5], mKdV [6, 7], ZK [8, 9], modified Kawahara equation [10], and so on [11, 12], have been obtained. Meanwhile, some natural phenomena related to Rossby waves were explained with the help of mathematical models [13]. We notice that the former research has the following two disadvantages:
(1) The motion equations describing ocean and atmosphere, including momentum equation, continuity equation, and so on, are very complicated. For the sake of simplicity, we can find that \((1+1)\) dimensional nonlinear partial differential equations are used to describe the evolution of nonlinear Rossby waves. However, real oceanic and atmospheric motions are not just in one direction. Providing higher dimensional theories for the nonlinear Rossby waves is necessary. So, in this paper, we discuss a new \((2+1)\) dimensional model [14].
(2) All the time, the complete Coriolis force has been an important research hot spot in dealing with the atmosphere and ocean. On the one hand, the horizontal component of the complete Coriolis force shows the imbalance of the motion, which is an important factor that causes the development of weather system. On the other hand, the theoretical research on the nonlinear Rossby waves in the atmosphere has been a very important subject in meteorology. So, it is necessary to analyze the effect of intact Coriolis force on atmospheric dynamics. However, in order to calculate and study it conveniently, many researchers ignore the complete Coriolis force. As we know, the TA is suitable for quantitative studies. In the past, Kasahara [15] pointed out that the errors made by ignoring the vertical acceleration may be much larger than those made by ignoring the horizontal component of complete Coriolis force. However, it is controversial from the dynamical perspective [16, 17]. White and Bromley [18] indicated the necessity to retain the horizontal component of Coriolis force by scale analysis of the zonal momentum equations. It is necessary to include the cosine Coriolis terms for fully understanding the atmospheric motion, which is named ‘non-traditional approximation’ (NTA). Based on the NTA, the near-inertial waves were considered by Gerkema and Shrira [19] from primitive equations. Using the variational method, a conserved potential vorticity equation with complete Coriolis force was obtained by Dellar and Salmon [20]. According to the Hamilton least-action principle [21], Dellar also derived a generalized beta plane equation. So, the NTA is more important for tropical atmosphere, such as the stability theory [22–24], the dispersion relation [25, 26], the Madden-Julian Oscillation(MJO) [27, 28], and so on [29–31].
Conservation laws [32, 33] are a power tool for studying the global stability of solutions and numerical integration for PDEs emerging in nonlinear science. Numerous powerful methods have been used to seek the conservation laws: Laplace direct technique [34], characteristic form given by Stuedel [35], q-homotopy analysis transform method (q-HATM) [36], multiplier approach [37, 38]. In this thesis, based on the modified Camassa-Holm equation [39] and ZK-BBM equations [40] for each multiplier, and the method of Ibragimov (nonlocal conservation method) [41–43], using the multiplier approach, conservation laws and the corresponding conserved quantities are discussed.
The investigation of the soliton solutions [44–46] for PDEs has become highly active in all areas of applied research. Many efficient techniques, such as homogeneous balance technique [47], symmetry theory [48], Jacobi elliptic function method [49], homotopy analysis transform method [50], homotopy perturbation transform method [51], Darboux transformation [52–54], Bilinear method [55, 56], and so on [57], have been proposed to seek solitary waves solutions. In addition, some numerical methods, i.e., modified binomial and Monte Carlo methods [58], high accurate NRK, and MWENO [59–61], have also been used to solve partial differential equations. In the paper, we use the semi-inverse variational principle [62, 63] to obtain the soliton solutions of PDEs.
In this article, by using multi-scale analysis and perturbation method, a \((2+1)\) dimensional combined ZK-mZK model for Rossby solitary waves is obtained. According to the new model, we have a discussion. The construction of this paper is as follows. In Section 2, applying the quasi-geostrophic potential vorticity equation, we obtain a new combined ZK-mZK equation. The property of conservation laws and the corresponding conserved quantities of the new equation are discussed in Section 3. Later, the soliton solutions of the combined ZK-mZK equation are established in Section 4. According to the soliton solution, we research the solitary wave profiles for various timescales and the collisions between two waves with different velocities and various timescales. Finally, some conclusions are drawn.
2 The derivation of combined ZK-mZK equation
Based on the basic equations of geophysical fluid dynamics, after reasonable assumption, we can easily obtain the following non-dimensional quasi-geostrophic potential vorticity equation:
The vertical velocity is
where Ψ is the stream function. Normal component of the complete Coriolis is \(f=f_{0}+\beta (y)y\), and horizontal component is \(f_{H}\), where \(f_{0}\), \(f_{H}\) are unknown constants. \(G(x,y)\) is the topographic effect. \(N(z)\) is the function of z. \(\nabla^{2}= \partial^{2}/\partial x^{2}+\partial^{2}/\partial y^{2}\) is the Laplace operator.
The lateral boundary condition is
The vertical boundary condition is
Take the dimensionless variables into Eq. (1) and Eq. (2), then Eq. (1) and Eq. (2) are transformed into the dimensionless equation:
where \(K^{2}=L_{0}^{2}f_{0}^{2}/N^{2}H_{0}^{2}\), \(R_{0}=U_{0}/f_{0}L _{0}\), \(\theta =f_{H}*H/f_{0}*L_{0}\). \(L_{0}\) is the horizontal feature of space, \(U_{0}\) is the velocity characteristic quantity, and \(H_{0}\) is the characteristic quantity of fluid thickness.
Assume \(G(x,y)=\varepsilon^{\frac{3}{2}}O(y)\) and the stream function Ψ as the sum of zonal flow and perturbation stream function ψ
where the constant \(c_{0}\) is the sign of the velocity of non-dispersive part of linear Rossby waves. \(\varepsilon \ll 1\) is a small parameter used to measure the magnitude of nonlinear feature.
Substituting the stream function Ψ into Eq. (5), we have
where \(\tilde{\beta }=(\beta (y)y)'-U''\). Further, \(J[A,B]=\frac{ \partial A}{\partial X}\frac{\partial B}{\partial Y}-\frac{\partial A}{ \partial Y}\frac{\partial B}{\partial X}\).
We introduce the following multiple time-space scale transform in the Rossby waves equation:
Substituting Eq. (10) into Eq. (8), we have
The boundary conditions can be written in the following form:
Therefore, in the vertical direction, the boundary satisfies
Assume the perturbation stream function expanded with small parameter ε,
Substituting Eq. (14) into Eq. (11) leads to all-order perturbation equations about ϵ.
In the first place, introduce the operator L
First-order approximation
The boundary conditions can be written as follows:
The vertical boundary condition is
Owing to Eq. (16) being the linear equation, we assume the solution of \(\psi_{0}\) is as follows:
Substituting the solution of \(\psi_{0}\) Eq. (19) into Eq. (16) and Eq. (17), we get the eigenvalue problem on level eigenfunction \(\phi_{0}\), \(P_{0}\):
Similar to the first approximation, we continue to consider the higher order problem
Take the variables form of \(\psi_{1}\) in the following form:
Further,
Similar to Eq. (19), assume the solution of \(\psi_{2}\)
Substituting Eq. (22), Eq. (24) into Eq. (21) and Eq. (23), the eigenfunction equations about \(\psi_{1}\), \(\psi_{2}\), \(P_{1}\), \(P_{2}\) can be obtained as follows:
Analogously, the boundary conditions can be written as follows:
The vertical boundary condition is
In order to obtain the singularity elimination condition, it is important to make further discussion.
Substituting Eq. (19) into Eq. (28), we get
The boundary conditions are no less than the above conditions. Based on Eq. (28), we can have the separate variables form of \(\psi_{3}\)
Multiplying Eq. (33) by \(\phi_{0}\), integrating Eq. (33) with respect to y, z from 0 to +∞, and using the following identical equation
we can obtain
where
Remark
Eq. (35) is a new \((2+1)\) dimensional model. The coefficient \(a_{0}\) is in connection with topographic effect G. The second term \(a_{0}A_{X}\) represents the effect of complete Coriolis force and topography on the evolution of Rossby solitary waves. Based on \(a_{1}AA_{X}\) and \(a_{2}A^{3}A_{X}\), we know that the new equation is the combination of ZK equation and mZK equation. So, the new model Eq. (35) is called combined ZK-mZK equation. Compared with other models, the combined ZK-mZK model can describe Rossby solitary waves more accurately.
In order to facilitate the calculation, we ignore the effect of complete Coriolis force. Introducing the transformation \(T'=T\), \(X'=X-a_{0}T\) and \(Y'=Y\), substituting the transformation into Eq. (35), and omitting the apostrophe, we can rewrite the combined ZK-mZK equation in the following form:
3 The derivation of conservation laws
To learn more about the new model, the conservation laws of the combined ZK-mZK equation are discussed. The research process of conservation laws is as follows. The Euler operator is defined as [64]
where \({D_{t}}\), \({D_{x}}\),and \({D_{y}}\) are defined as follows:
Consider the nth-order partial differential equation of t, x, and y as follows:
A vector \(Q = ({Q^{t}},{Q^{x}},{Q^{y}})\) such that
holds for all solutions of Eq. (42) and is defined as the conserved vector of Eq. (42).
The multiplier Δ for Eq. (42) has the property as follows:
For an arbitrary function \(u(x,y,t)\), the determining equations for multiplier are acquired by taking the variational derivative of Eq. (44)
For an arbitrary function \(u(x,y,t)\), Eq. (45) sets up forever. Using Eq. (44) and computing the multiplier from Eq. (45), we can derive the conserved vectors.
According to Section 2, the combined ZK-mZK equation is given by
According to the defining equation for multiplier \(\Delta (X,Y,T,A(X,Y,T))\) from Eq. (37), after simplification, we can have
The coefficients of different derivatives of A of Eq. (46) for multiplier Δ give
By calculating, conserved quantities for Eq. (37) are obtained as follows:
So, we can have
For the multiplier \(\Delta (X,Y,T,A) =F(Y)\), the physical conserved quantities are as follows:
4 The soliton solutions
In order to seek the soliton solution [65, 66] of a partial differential equation, the semi-inverse variational principle is used. Its steps are as follows:
Step 1. For an arbitrary function \(u(x,y,t)\), assuming \(u(x,y,t)=u(x+y-ct)\) and \(\xi = x+y-ct\), we can convert the partial differential equation into an ordinary differential equation
where c is the wave speed and \(c_{0}\) is the integration constant.
Step 2. A steady integral is constructed in the following form:
Step 3. In order to find the one soliton to Eq. (42), we let
where p is the wave amplitude of Rossby solitary waves, q is the inverse width of Rossby solitary waves, n is the exponent, and it is obtained by equating the exponents of the highest derivatives and nonlinear terms.
Step 4. Substituting Eq. (37) into Eq. (59), letting \(\frac{\partial I}{\partial p}=0\) and \(\frac{\partial I}{\partial q}=0\), and solving them to determine the constants p and q, respectively, we determine the solitary wave solutions of Eq. (37).
In this section, by using the semi-inverse variational principle, we seek the soliton solutions of ZK-mZK equation. We convert Eq. (37) into ODE wave transformation:
and Eq. (37) has the following form:
and
Assuming \(n = 2/3\), \(A = p\operatorname{sech}^{\frac{2}{3}}(q \xi )\) and integrating the above equation, we can get
Eq. (64) can be rewritten as follows:
where \(\Gamma (x) = \int_{0}^{ + \infty } {{t^{x - 1}}{e^{ - t}}\,dt}\), \({\tau_{1}} = \frac{{\frac{{\sqrt{\pi }}}{3}\Gamma (\frac{1}{6})}}{ {\Gamma (\frac{2}{3})}} = 4.21\), \({\tau_{2}} = \frac{{3\Gamma ( \frac{2}{3})\Gamma (\frac{5}{6})}}{{\sqrt{\pi }}} = 2.587\), \({\tau_{3}} = \frac{{\sqrt{\pi }\Gamma (\frac{4}{3})}}{{\Gamma (\frac{ {11}}{6})}} = 1.68\), \({\tau_{4}} = \frac{{3\sqrt{\pi }\Gamma ( \frac{4}{3})}}{{2\Gamma (\frac{{11}}{6})}} = 2.52\).
According to Eq. (65), taking a derivative with respect to q and p, we can have the following equations:
and
So, we can get the equation as follows:
After calculation, we can obtain the expression of p and q as follows:
At this time, we can get the soliton solution of the combined ZK-mZK equation in the following form:
Assuming \({a_{1}} =-0.5\), \({a_{2}} = 1\), \({a_{3}} = 5\), \({a_{2}} = 5\), \(c=0.5\) and substituting them into Eq. (69), Eq. (70), and Eq. (71), we can get \(p = 1.7\) and
When \(c=5\), we also have the other equation about solution as follows:
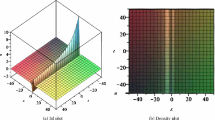
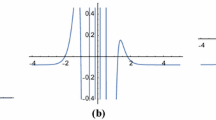
Soliton is a solitary wave packet which is caused by the delicate balance between nonlinearity effect and dispersion effect. It is a single hump that has infinite tails or infinite wings and preserves their form and speed after an entire interaction with other solitons. In this section, we display the soliton solutions and the solitary wave profiles for various timescales in Figure 1. According to Figure 1, we can know that the soliton moves to the right with a fixed velocity and almost unaltered amplitude as time increases. In Figure 2, the collisions between two waves with different velocities and various timescales appear. We also know that the wave speed c plays a critical role in a physical structure of the solutions for the combined ZK-mZK equation. Then we can guess that the solitary wave profile moves in the positive axes when c is a positive value, and the solitary wave profile moves in the negative axes when c is a negative value.

The soliton solution and the solitary wave profiles for various timescales for \(\pmb{T=0}\) , \(\pmb{T=3}\) , and \(\pmb{T=5}\) , respectively.

The collisions between two waves with different velocities for \(\pmb{c=0.5}\) and \(\pmb{c=5}\) , respectively, and various timescales for \(\pmb{t=0.08}\) , \(\pmb{t=0.1}\) , and \(\pmb{t=0.2}\) , respectively.
5 Conclusions and discussions
In this paper, using the quasi-geostrophic potential vorticity equation, we get a new \((2+1)\) dimensional combined ZK-mZK model for Rossby solitary waves by applying the multi-scale analysis and perturbation method. Based on the new model, we study conservation laws and the soliton solutions of the new equation. By theory and image analysis, the following conclusions can be obtained:
(1) A combined ZK-mZK equation is a new \((2+1)\) dimensional model which includes the cosine Coriolis terms. Compared with \((1+1)\) dimensional models, it can describe the actual situation of ocean and atmosphere. Besides, in the actual ocean and atmosphere, the cosine Coriolis is not ignored. It is necessary to include the cosine Coriolis terms for fully understanding the atmospheric motion. So, the combined ZK-mZK equation is more suitable to describe Rossby solitary waves.
(2) According to the combined ZK-mZK equation, using the multiplier approach, we obtain conservation laws and the corresponding conserved quantities. In addition, the semi-inverse variational principle is a robust and efficient method which gives the variational principles for nonlinear problems. By using the semi-inverse variational principle, we obtain soliton solution for the new equation. According to the soliton solution, some propagation features of Rossby solitary waves are discussed.
References
Ambrizzi, T, Hoskins, BJ, Hsu, HH: Rossby wave propagation and teleconnection patterns in the austral winter. J. Atmos. Sci. 52, 3661 (1970)
Grimshaw, R: Nonlinear aspects of long shelf waves. Geophys. Astrophys. Fluid Dyn. 8, 3 (1977)
Redekopp, LG: On the theory of solitary Rossby waves. J. Fluid Mech. 82, 725 (1977)
Wadati, M: The modified Korteweg-deVries equation. J. Phys. Soc. Jpn. 34, 1289 (1973)
Chen, JC, Zhu, SD: Residual symmetries and soliton-cnoidal wave interaction solutions for the negative-order Korteweg-de Vries equation. Appl. Math. Lett. 73, 136 (2017)
Song, J, Yang, LG: Modified KdV equation for solitary Rossby waves with effect in barotropic fluids. Chin. Phys. B 7, 2873 (2009)
Xu, XX: An integrable coupling hierarchy of the MKdv-integrable systems, its Hamiltonian structure and corresponding nonisospectral integrable hierarchy. Appl. Math. Comput. 216, 344 (2010)
Biswas, A: Topological and non-topological solitons for the generalized Zakharov-Kuznetsov modified equal width equation. Int. J. Theor. Phys. 48, 2698 (2009)
Zhang, RG, Yang, LG, Song, J, Yang, HL: \((2+1)\) dimensional Rossby waves with complete Coriolis force and its solution by homotopy perturbation method. Comput. Math. Appl. 73, 1996 (2017)
Kumar, D, Singh, J, Baleanu, D: Modified Kawahara equation within a fractional derivative with non-singular kernel. Therm. Sci. (2017). https://doi.org/10.2298/TSCI160826008K
Yang, HW, Xu, ZH, Yang, DZ, Feng, XR, Yin, BS, Dong, HH: ZK-Burgers equation for three-dimensional Rossby solitary waves and its solutions as well as chirp effect. Adv. Differ. Equ. 2016, 167 (2016)
Yang, HW, Zhao, QF, Dong, HH: A new integrodifferential equation for Rossby solitary waves with topography effect in deep rotational fluids. Abstr. Appl. Anal. 2013, 597807 (2013)
Yang, HW, Yin, BS, Shi, YL, Wang, QB: Forced ILW-Burgers equation as a model for Rossby solitary waves generated by topography in finite depth fluids. J. Appl. Math. 2012, 491343 (2012)
Yang, JY, Ma, WX, Qin, ZY: Lump and lump-soliton solutions to the \((2+1)\)-dimensional Ito equation. Anal. Math. Phys. (2017). https://doi.org/10.1007/s13324-017-0181-9
Philips, NA: Reply to G. Veronis’s comments on Phillips (1966). J. Atmos. Sci. 25, 115 (1968)
Veronis, G: Comments on Phillips’s (1966) proposed simplification of the equations of motion for shallow rotating atmosphere. J. Atmos. Sci. 5, 1154 (1968)
Wangsness, RK: Comments on “The equations of motion for a shallow rotating atmosphere and the ‘traditional approximation’’’. J. Atmos. Sci. 27, 504 (1970)
White, AA, Bromley, RA: Dynamically consistent, quasi-hydrostatic equations for global models with a complete representation of the Coriolis force. Q. J. R. Meteorol. Soc. 121, 399-418 (1995)
Gerkema, T, Shrira, VI: Near-inertial waves on the “nontraditional” β-plane. J. Geophys. Res. 110, C01003 (2005)
Dellar, PJ, Salmon, R: Shallow water equations with a complete Coriolis force and topography. Phys. Fluids 17, 106601 (2005)
Dellar, PJ: Variations on a β-plane: derivation of non-traditional β-plane equations from Hamilton’s principle on a sphere. J. Fluid Mech. 674, 174 (2011)
Ma, HJ, Jia, YM: Stability analysis for stochastic differential equations with infinite Markovian switchings. J. Math. Anal. Appl. 435, 593 (2016)
Tramontana, F, Elsadany, AA, Xin, BG, Agiza, HN: Local stability of the Cournot solution with increasing heterogeneous competitors. Nonlinear Anal., Real World Appl. 26, 150 (2015)
Yan, ZG, Zhang, WH: Finite-time stability and stabilization of Ito-type stochastic singular systems. Abstr. Appl. Anal. 2014, 263045 (2014)
Yang, HL, Liu, FM, Wang, DN: Nonlinear Rossby waves near the equator with complete Coriolis force. Prog. Geophys. 31, 0988 (2016)
Hayashi, M, Itoh, H: The importance of the nontraditional Coriolis terms in large-scale motions in the tropics forced by prescribed cumulus heating. J. Atmos. Sci. 69, 2699 (2012)
Madden, RA, Julian, PR: Detection of a 40-50 day oscillation in the zonal wind in the tropical Pacific. J. Atmos. Sci. 28, 702 (1971)
Miura, H, Satoh, M, Nasuno, T: A Madden-Julian oscillation event realistically simulated by a global cloud-resolving model. Science 318, 1763 (2007)
Madden, RA, Julian, PR: Description of global-scale circulation cells in the tropics with a 40-50 day period. J. Atmos. Sci. 29, 1109 (1972)
Maloney, ED, Sobel, AH, Hannah, WM: Intraseasonal variability in an aquaplanet general circulation model. J. Adv. Model. Earth Syst. 2, 5 (2010)
Landu, K, Maloney, ED: Effect of SST distribution and radiative feedbacks on the simulation of intra seasonal variability in an aqua planet GCM. J. Meteorol. Soc. Jpn. 89, 195 (2011)
Tang, LY, Fan, JC: A family of Liouville integrable lattice equations and its conservation laws. Appl. Math. Comput. 217, 1907 (2010)
Li, XY, Zhang, YQ, Zhao, QL: Positive and negative integrable hierarchies, associated conservation laws and Darboux transformation. J. Comput. Appl. Math. 233, 1096 (2009)
Laplace, PS: Trait de Mcanique Cleste, Celestial Mechanics New York (1966)
Steudel, H: Uber die Zuordnung zwischen invarianzeigen-schaften and Erhaltungssatzen. Z. Naturforsch. 17A, 129 (1962)
Kumar, D, Singh, J, Baleanu, D: A new analysis for fractional model of regularized long-wave equation arising in ion acoustic plasma waves. Math. Methods Appl. Sci. 40, 5642 (2017)
Anco, SC, Bluman, GW: Direct construction method for conservation laws of partial differential equations. Part I: examples of conservation law classifications. Eur. J. Appl. Math. 13, 545 (2002)
Biswas, A, Kara, AH, Bokhari, AH, Zaman, FD: Solitons and conservation laws of Klein Gordon equation with power law and log law nonlinearities. Nonlinear Dyn. 73, 2191 (2013)
Liu, XH, Zhang, WG, Li, ZM: The orbital stability of the solitary wave solutions of the generalized Camassa-Holm equation. J. Math. Anal. Appl. 398, 776 (2013)
Ibragimov, NH: A new conservation theorem. J. Math. Anal. Appl. 333, 311 (2007)
Ibragimov, NH: Integrating factors, adjoint equations and Lagrangians. J. Math. Anal. Appl. 318, 742 (2006)
Ibragimov, NH, Shabat, AB: Korteweg-de Vries equation from the group-theoretic point of view. Sov. Phys. Dokl. 24, 15 (1979)
Wazwaz, AM: Compact and noncompact physical structures for the ZK-BBM equation. Appl. Math. Comput. 169, 713 (2005)
Wang, ML: Solitary wave solution for variant Boussinesq equations. Phys. Lett. A 199, 169 (1995)
Ma, WX: Trigonal curves and algebro-geometric solutions to soliton hierarchies I. Proc. R. Soc. A 473, 20170232 (2017)
Ma, WX: Trigonal curves and algebro-geometric solutions to soliton hierarchies II. Proc., Math. Phys. Eng. Sci. 473, 20170233 (2017)
Khalfallah, M: Exact traveling wave solutions of the Boussinesq-Burgers equation. Math. Comput. Model. 49, 666 (2009)
Li, XY, Zhao, QL, Li, YX, Dong, HH: Binary Bargmann symmetry constraint associated with \(3\times 3\) discrete matrix spectral problem. J. Nonlinear Sci. Appl. 8, 496 (2015)
Tian, ZL, Tian, MY, Liu, ZY, Xu, TY: The Jacobi and Gauss-Seidel-type iteration methods for the matrix equation AXB = C. Appl. Math. Comput. 292, 63 (2017)
Kumar, D, Singh, J, Kumar, S, Sushila: Numerical computation of Klein-Gordon equations arising in quantum field theory by using homotopy analysis transform method. Alex. Eng. J. 53, 469 (2014)
Goswami, A, Singh, J, Kumar, D: A reliable algorithm for KdV equations arising in warm plasma. Nonlinear Eng. 5, 7 (2016)
Xu, XX: A deformed reduced semi-discrete Kaup-Newell equation, the related integrable family and Darboux transformation. Appl. Math. Comput. 251, 275 (2015)
Zhao, QL, Li, XY, Liu, FS: Two integrable lattice hierarchies and their respective Darboux transformations. Appl. Math. Comput. 219, 5693 (2013)
Xu, XX, Sun, YP: An integrable coupling hierarchy of Dirac integrable hierarchy, its Liouville integrability and Darboux transformation. J. Nonlinear Sci. Appl. 10, 3328 (2017)
Dong, HH, Zhang, YF, Zhang, YF, Yin, BS: Generalized bilinear differential operators, binary Bell polynomials, and exact periodic wave solution of Boiti-Leon-Manna-Pempinelli equation. Abstr. Appl. Anal. 2014, 738609 (2014)
Guo, XR: On bilinear representations and infinite conservation laws of a nonlinear variable-coefficient equation. Appl. Math. Comput. 248, 531 (2014)
Zhang, XE, Chen, Y, Zhang, Y: Breather, lump and X soliton solutions to nonlocal KP equation. Comput. Math. Appl. 74, 2341 (2017)
Nwozo, CR, Fadugba, SE: Some numerical methods for options valuation. Commun. Math. Finance 1, 51 (2012)
Hajipour, M, Malek, A: High accurate NRK and MWENO scheme for nonlinear degenerate parabolic PDEs. Appl. Math. Model. 36, 4439 (2012)
Hajipour, M, Malek, A: High accurate modified WENO method for the solution of Black-Scholes equation. Comput. Appl. Math. 34, 125-140 (2015)
Hajipour, M, Malek, A: Efficient high-order numerical methods for pricing of options. Comput. Econ. 45, 31 (2015)
Elboree, MK: Derivation of soliton solutions to nonlinear evolution equations using He’s variational principle. Appl. Math. Model. 39, 4196 (2015)
Elboree, MK: Variational approach, soliton solutions and singular solitons for new coupled ZK system computers and mathematics with applications. Comput. Math. Appl. 70, 934 (2015)
Mohammed, KE: Conservation laws, soliton solutions for modified Camassa-Holm equation and \((2+1)\)-dimensional ZK-BBM equation. Nonlinear Dyn. 89, 2979 (2017)
Zhang, JB, Ma, WX: Mixed lump-kink solutions to the BKP equation. Comput. Math. Appl. 74, 591 (2017)
Zhang, HQ, Ma, WX: Mixed lump-kink solutions to the KP equation. Comput. Math. Appl. 74, 1399 (2017)
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Nos. 41576023, 11571207), China Postdoctoral Science Foundation funded project (No. 2017M610436), CAS Interdisciplinary Innovation Team ‘Ocean Mesoscale Dynamical Processes and Ecological Effect’, Key project of Nanjing Vocational Institute of Transport Technology (No. JZ1701), the Science and Technology Plan Projects of Shandong Province Universities and Colleges (No. J15LI54).
Author information
Authors and Affiliations
Contributions
The authors declare that the study was realized in collaboration with the same responsibility. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Zhao, B.J., Wang, R.Y., Sun, W.J. et al. Combined ZK-mZK equation for Rossby solitary waves with complete Coriolis force and its conservation laws as well as exact solutions. Adv Differ Equ 2018, 42 (2018). https://doi.org/10.1186/s13662-018-1492-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1492-3