
Abstract
This paper studies the fractional Lotka-Volterra equations for three competitors, since the fractional derivatives possess the properties of good memory and have great biological significance. First of all, the equilibrium points and asymptotic stability for the equations are studied by the stability analysis method. As expected, the fractional-order differential equations are, at least, as stable as their integer-order counterpart. Second, some approximate analytic solutions for this systems are obtained by the stability analysis method and the homotopy perturbation method, which are expressed in the form of the Mittag-Leffler function. The results show that it takes less time for the population to get close to the equilibrium point as the time derivatives increase. Comparing with the classical ones, the fractional Lotka-Volterra equations, no matter whether the fractional derivatives have big or small order, if both take more time, even multiplied time, for the system to reach the equilibrium point, then that may explain the memory properties. Furthermore, some numerical analyses are carried out and verify the theoretical analysis.
Similar content being viewed by others


1 Introduction
The classical Lotka-Volterra problem was introduced as a model for undamped oscillating chemical reactions and the dynamics of ecological systems with predator-prey interactions by Lotka [1] and Volterra [2], respectively. For the model with a linear functional response of predator it is given by
where \(x=x(t)\), \(y=y(t)\) are the densities of the prey and predator populations at tine t. Generally for the n competing species, the following first-order differential equations describe the dynamics of the competing populations [3]:
where \(x_{i}=x_{i}(t)\) is the number of individuals in the ith population at time t, \(k_{i}\) is the intrinsic growth rate of the ith population, and the competition coefficients \(c_{ij}\) describe the extent to which the jth species affects the growth rate of the ith species.
Since the classical Lotka-Volterra model has been applied to all kinds of problem in population biology, neural networks, and others, this model has been studied by many ecologists and mathematicians. For now, many important and interesting results have been found, such as the existence and uniqueness of solutions [4, 5], global asymptotic stability [6], Hopf bifurcation [7], and extinction [8]. For some other research results, see [9, 10] and the references therein.
However, most biological systems have memory properties, and the evolution of each species is better described by the generation of Brownian motions. Thus one needs some innovative model to describe the evolution behavior. Fortunately, a new tool called fractional calculus has been found and applied in various systems since fractional derivatives possess the properties of good memory and being hereditary [11]. Also, fractional calculus has been successfully applied in mathematical biology, such as the nonlocal epidemics [12], or the fractional logistic model [13]. More importantly, the corresponding fractional Lotka-Volterra equations are established in describing the dynamical behaviors for an arbitrary number of competitors:
where \(D_{t}^{\alpha_{i}}\) is for the fractional derivatives and \(0<\alpha _{i}<1\). The fractional Lotka-Volterra equations are obtained from the classical equations by replacing the first-order time derivatives by the derivatives of fractional order. Although the system (4) is simplified under the assumption that the competition functions between the species are linear, they still show difficulty in research. Some researchers have studied the system for two species. Ahmed et al. studied the equilibrium points and stability for the fractional-order predator-prey and rabies models [14]. Srivastava et al. analyzed the synchronization of chaotic [15]. Meanwhile, some approximate solutions are also searched for by various methods, such as the homotopy perturbation method [16, 17], or the variational iteration method [18]. Some other important results, such as stability, bifurcation, and numerical solutions are also being carried out; see [19, 20] and the references therein.
But for the fractional Lotka-Volterra equations between multi-populations, there are few biological and mathematical results to the best of our knowledge. Therefore, in this paper, we are trying to consider some basic questions for the multi-population fractional Lotka-Volterra equations, and we come first to consider the following initial problem for three competitors, labeled X, Y and Z:
For the three competitor system, there are 12 parameters. Although some parameters can be absorbed by renormalizing the populations, there are left most disposable parameters characterizing the system. So in order to simplify the problem, we make the following symmetry assumptions: (1) \(k_{1}=k_{2}=k_{3}\); (2) with respect to competition, Y affects X as Z affects Y as X affects Z, which means \(c_{12}=c_{23}=c_{31}=a\); (3) similarly one arrives at \(c_{21}=c_{32}=c_{13}=b\). Furthermore, we rescale the populations so that effectively \(c_{11}=c_{22}=c_{33}=1\), and we rescale t so that in effect \(k=1\), then we have the following equivalent system:
Thus in the following, we mainly study the initial problem for the system (9)-(12). Specifically, we are going to study the asymptotic stability and approximate analytic solutions for the system with the help of a stability analysis and homotopy perturbation method (HPM). The HPM was first proposed by He to find the approximate analytical solution for linear and nonlinear problems [21–23]. This method was successfully applied to all kinds of partial differential equations [16, 17, 24], since it does not require small parameters in the equations, which overcomes the limitations of the other traditional perturbation techniques. One should notice that it is plausible that the qualitative features of the system (5)-(8) will remain true in the more general asymmetric case. We will discuss the situation in our further study.
The rest of paper is organized as follows. In Section 2, we briefly give some preliminaries. In Section 3, we will study the equilibrium points, asymptotic stability, and the approximate analytic solutions for the fractional Lotka-Volterra system (9)-(12) with the help of a stability analysis. In Section 4, other forms of approximate analytic solutions are studied by the homotopy perturbation method. In Section 5, some numerical results are presented to verify the theoretical analysis. In Section 6, we draw some conclusions.
2 Some preliminaries
In this section, we will briefly give some preliminaries of the fractional calculus and the homotopy perturbation method, which will be used in the next sections.
2.1 Fractional calculus
Since the fractional calculus was proposed in the last two centuries, there are mainly three kinds of definitions to describe the fractional-order derivatives: the Grünwald-Letnikov derivative, the Riemann-Liouville derivative, and the Caputo derivative [11]. However, the Caputo derivative, which we will use in this paper, is the one most commonly employed in real applications, since it has the advantage of only requiring initial conditions given in terms of integer-order derivatives, unlike the Riemann-Liouville fractional derivative, requiring initial conditions to be expressed in terms of fractional integrals and their derivatives, while the initial conditions represent well-understood features of a physical situation. The fractional derivative of \(f(t)\) in the Caputo sense is defined as [25]
where \(\alpha>0\) and \(J_{t}^{\beta}f(t)\) (\(\beta>0\)) is the Riemann-Liouville fractional integral of \(f(t)\) defined by
There \(\Gamma(\cdot)\) is Euler’s gamma function. \(D_{t}^{\alpha}\) and \(J_{t}^{\beta}\) are called the Caputo fractional derivative operator and Riemann-Liouville fractional integral operator, respectively.
For the properties of the fractional integrals and derivatives, we have the following results [11].
Lemma 1
If \(m-1<\alpha\leq m\), and \(f(t)\in L_{1}[0,T]\) the usual Lebesque space, then
Lemma 2
If \(0<\alpha<1\), and considering the following initial value problem for a non-homogeneous fractional equation:
then the solution for the problem can be solved as
where \(E_{\alpha,\beta}(z)\) is the Mittag-Leffler function defined by [11]
Proof
These results can be proved easily with the help of the Laplace transform and the properties of the Mittag-Leffler function. We omit the details for simplicity. □
Remark
The Mittag-Leffler function (23) was in fact introduced by Agarwal [26] and is the two-parameter generalization of the exponential function \(e^{z}\), which plays a very important role in the theory of population biology. The exponential function can be found in the classical Malthus model and logistic model, and thus the Mittag-Leffler function is more generalized to describe a real-world growing population.
Lemma 3
Let \(\alpha>0\), \(\beta>0\), and \(\gamma>0\), then for the Mittag-Leffler function \(E_{\alpha,\beta}(z)\), we have the following results [11]:
where \(E^{(k)}_{\alpha,\beta}(y)=\frac{d^{k}}{dy^{k}}E_{\alpha,\beta}(y)\). And
2.2 Homotopy perturbation method
In order to illustrate the basic ideas of the homotopy perturbation method [21–23], we consider the following boundary value problem for the nonlinear differential equation:
where A is a general differential operator, which can be divided into linear parts L and nonlinear parts N generally, B is a boundary operator, \(f(\mathbf{r})\) is a well-known analytic function, Γ is the boundary of the domain Ω.
According to the homotopy technique, one can construct a homotopy \(v(r,p):\Omega\times[0,1]\rightarrow R\) which satisfies
or
where \(p\in[0,1]\) is an embedding parameter, \(u_{0}\) is an initial approximation which satisfies the boundary conditions.
Let us suppose that the solution of (28) or (29) can be expressed as a power series in p:
Then setting \(p=1\) in the above equation one can obtain the approximate solution for (27)
The convergence of the series of (31) has been proved in [21–23].
3 Equilibrium points and their approximate solutions
In this section, we first consider the equilibrium points and the asymptotic stability for the system (9)-(12), and furthermore we obtain their approximate solutions by the Mittag-Leffler functions. First for evaluating the equilibrium points, one lets \(D_{t}^{\alpha}x=0\), \(D_{t}^{\beta}y=0\), \(D_{t}^{\gamma}z=0\), which imply
Then the equilibrium points \((x^{\mathrm{eq}},y^{\mathrm{eq}},z^{\mathrm{eq}})\) can be solved from the above systems. On the other hand, to evaluate the asymptotic stability, let \(\xi=[\xi_{1}(t), \xi_{2}(t), \xi _{3}(t)]^{T}\) and
Substituting (33) into the system (32) and noticing \(f_{i}(x^{\mathrm{eq}}, y^{\mathrm{eq}}, z^{\mathrm{eq}})=0\) (\(i=1,2,3\)), then we have
Then we can rewrite the system as
where
and
On the other hand, for the coefficient matrix A, we can get the eigenvalues \((\lambda_{1},\lambda_{2},\lambda_{3})\) and the eigenvectors B of A such that
where C is a diagonal matrix given by
From (38), we find \(A=BCB^{-1}\) and we substitute into (35); we have
and
If we set
where \(\eta=[\eta_{1}(t),\eta_{2}(t),\eta_{3}(t)]^{T}\), then we obtain \(D_{t}^{*}\eta=C\eta\), and
The solutions of (43) are given by the Mittag-Leffler functions [11]:
where
Finally, combining (33), (42), and (45)-(47), we can obtain the solutions for the system (9)-(12).
Furthermore, using the result of Matignon [27] then if the eigenvalues of the matrix A are negative (\(|\operatorname{arg}(\lambda_{1})|>\alpha\pi /2\), \(|\operatorname{arg}(\lambda_{2})|>\beta\pi/2\), \(|\operatorname{arg}(\lambda_{3})|>\gamma\pi/2\)), the equilibrium point \((x^{\mathrm{eq}}, y^{\mathrm{eq}}, z^{\mathrm{eq}})\) is locally asymptotically stable. This result confirms the statement that fractional-order differential equations are, at least, as stable as their integer-order counterpart [14].
In order to illustrate the points specifically, we use the Maple software to compute each of the terms. First, the equilibrium points for the system (32) can be solved easily and they are \((x^{\mathrm{eq}}, y^{\mathrm{eq}}, z^{\mathrm{eq}})=(0, 0, 0), (0, 0, 1), (0, 1, 0), (1, 0, 0), (0, \frac{a-1}{ab-1}, \frac {b-1}{ab-1} ), (\frac{b-1}{ab-1},0,\frac{a-1}{ab-1} ), (\frac{a-1}{ab-1},\frac{b-1}{ab-1}, 0 ), (\frac {1}{a+b+1}, \frac{1}{a+b+1}, \frac{1}{a+b+1} )\). In the following, we take \((x^{\mathrm{eq}}, y^{\mathrm{eq}}, z^{\mathrm{eq}})= (\frac {1}{a+b+1}, \frac{1}{a+b+1}, \frac{1}{a+b+1} )\) for consideration as an example, the other equilibrium points can be analyzed in the same way. Second, the matrices A and B and the eigenvalue λ can be calculated accordingly:
Then from (34) and (47), we have
Thus from (33), (42), and (44)-(46), we can obtain the solutions for the system (9)-(12):
and
where \(\eta_{1}(0)\), \(\eta_{2}(0)\), and \(\eta_{3}(0)\) are obtained in (49).
At last, according to asymptotic stability results, the equilibrium point \((x^{\mathrm{eq}}, y^{\mathrm{eq}}, z^{\mathrm{eq}})= (\frac {1}{a+b+1}, \frac{1}{a+b+1}, \frac{1}{a+b+1} )\) is locally asymptotically stable if \(0< a+b<2\). That is to say, if the competition affects the coefficients among the three populations a and b satisfying the condition \(0< a+b<2\), then the densities of the populations X, Y, and Z will eventually trend to be stable and close to the equilibrium point \((x^{\mathrm{eq}}, y^{\mathrm{eq}}, z^{\mathrm{eq}})\). The numerical simulations in the following section will also support this result.
4 Approximate solutions by HPM
In this section, we will employ the HPM to obtain the approximate solutions for the fractional multispecies Lotka-Volterra (9)-(12). First according to the basic idea of the HAM, we can construct the following homotopies \((u,v,w)\) for the system:
where the homotopy parameter \(p\in[0,1]\). Then we suppose that the solutions of the system (54)-(56) can be expressed as a power series in p as follows:
where the \(u_{i}(t)\), \(v_{i}(t)\), \(w_{i}(t)\) (\(i=0,1,\ldots\)) are functions yet to be determined. And we suppose that \(u_{i}(0)\), \(v_{i}(0)\), \(w_{i}(0)\) for \(i=1,2,3,\ldots \) . Substituting (57)-(59) into (54)-(56) and equating the terms with identical powers of p, we can obtain the following set of linear differential equations:
and the general equations for \(p^{k}\):
Then we can obtain \(u_{i}(t)\), \(v_{i}(t)\), \(w_{i}(t)\) (\(i=0,1,\ldots\)) in a recurrent manner. Indeed, when computing \(u_{k}(t)\), \(v_{k}(t)\), \(w_{k}(t)\) (\(k\geq 1\)), one can find the right hand sides of (64) to depend only on \(u_{i}(t)\), \(v_{i}(t)\), \(w_{i}(t)\) (\(i=0,1,k-1\)), which are already known. Then applying the results of (22) in Lemma 2, we can determine the terms \(u_{k}(t)\), \(v_{k}(t)\), \(w_{k}(t)\). Thus every term of \(u_{i}(t)\), \(v_{i}(t)\), \(w_{i}(t)\) (\(i=0,1,\ldots\)) can be calculated.
Using Maple software and combining with Lemma 3, we can obtain the explicit formulations for the \(u_{i}(t)\), \(v_{i}(t)\), \(w_{i}(t)\) (\(i=0,1,\ldots\)). The first few terms are derived as follows:
where \(A_{1}=x_{0}-x_{0}^{2}-ax_{0}y_{0}-bx_{0}z_{0}\), \(A_{2}=y_{0}-bx_{0}y_{0}-y_{0}^{2}-ay_{0}z_{0}\), \(A_{3}=z_{0}-ax_{0}z_{0}-by_{0}z_{0}-z_{0}^{2}\) are constants depending on the initial values. In the same way, we have
Finally, we can get the approximate solutions \(x(t)\), \(y(t)\), \(z(t)\) for the system (9)-(12) readily
where the coefficients can be expressed and calculated explicitly.
5 Numerical results and discussion
In the previous sections, we have obtained the approximate analytic solutions as found in (51)-(53) and (68) for the fractional Lotka-Volterra equations (9)-(12) by the stability analysis and HPM. Thus in this section, we present some numerical simulation. For simplicity, we take \(a=b=0.5\), which means the competition affecting coefficients among the three populations are the same, and we choose the initial values \(x_{0}=1\), \(y_{0}=0.8\), \(z_{0}=0.2\). Thus according to the asymptotic stability results, we know the positive equilibrium point is \((x^{\mathrm{eq}}, y^{\mathrm{eq}}, z^{\mathrm{eq}})=(\frac{1}{2}, \frac{1}{2}, \frac {1}{2})\), and this equilibrium point is locally asymptotically stable.
When \(\alpha=\beta=\gamma=1\), the system (9)-(12) reduced the classical Lotka-Volterra equations, which possesses the locally asymptotically stable equilibrium point \((\frac {1}{2}, \frac{1}{2}, \frac{1}{2})\). The numerical solutions can be presented in Figure 1. As seen in the figure, all the solutions move toward the equilibrium point as the time t increases.

Plots of \(\pmb{x(t)}\) , \(\pmb{y(t)}\) , and \(\pmb{z(t)}\) for the classical Lotka-Volterra equations when \(\pmb{\alpha=\beta=\gamma=1}\) .
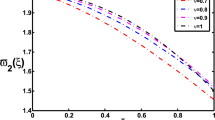
When \(0<\alpha, \beta, \gamma<1\), we first adopt (51)-(53) to obtain the numerical solutions for various fractional orders. Figure 2 displays the numerical results of the fractional Lotka-Volterra equations when \(\alpha=\beta=\gamma=\frac{1}{3}\) and \(\alpha=\beta=\gamma=\frac{2}{3}\). As it is expected that fractional-order differential equations are, at least, as stable as their integer-order counterpart, all the numerical solutions in both plots are moving toward the equilibrium point \((\frac{1}{2}, \frac{1}{2}, \frac{1}{2})\). What is more, we can find that it takes less time for the every population to get close to the equilibrium point as the time derivatives increase. Compared the classical Lotka-Volterra equations, which possess ordinary derivatives on the left hand side, we can see that the fractional Lotka-Volterra equations, no matter whether or not the order of the fractional derivatives is big or small, both take more time, even multiplied for populations, to reach the equilibrium, which may be the reason that the natural biological systems have memory properties, and the fractional derivatives provide an excellent instrument in comparison with the classical integer-order counterparts.

On the other hand, we apply the HPM and take only two terms in (68) to obtain the numerical solutions for various fractional orders \(0<\alpha, \beta, \gamma<1\). Figure 3 represents the numerical simulation results. As we can see, all the numerical solutions in both plots are moving toward some points asymptotically. However, the points are different from the equilibrium points. That is because we just take only two terms in equations (68) to compute the numerical simulation for simplicity, since the following terms are tedious and time-consuming to calculate. But we do believe that the more terms we take in equations (68), the more precise the numerical results will be. At the same time, we also find that it takes less time for the species to get close to the equilibrium point as the time derivatives increases, which expresses the same character as the previous stability analysis method. Thus the analytical method HPM is a useful tool for solving the nonlinear fractional equations. However, the convergence and the accuracy for the numerical results need to be considered for further study.

Plots of \(\pmb{x(t)}\) , \(\pmb{y(t)}\) , and \(\pmb{z(t)}\) in ( 68 ) for the fractional Lotka-Volterra equations when (a) \(\pmb{\alpha =\beta=\gamma=\frac{1}{3}}\) , (b) \(\pmb{\alpha=\beta=\gamma=\frac{2}{3}}\) .
6 Conclusions
Since natural biological systems have memory properties, fractional differential equations provide an excellent instrument in this respect in comparison with the classical integer-order counterparts. Thus in this paper, we studied the fractional Lotka-Volterra equations for three competitors under some symmetry assumptions. First we studied the equilibrium points and asymptotic stability for the equations by the stability analysis method, and we argued that the fractional-order differential equations are, at least, as stable as their integer-order counterpart. Second, we applied the stability analysis method and the homotopy perturbation method to obtain the approximate analytic solutions for the fractional systems, which are expressed in the form of the Mittag-Leffler function. As the numerical results also show, it takes less time for the population to get close to the equilibrium point as the time derivatives increases. However, compared with the classical Lotka-Volterra equations, we can see that the fractional Lotka-Volterra equations, no matter whether the order of the fractional derivatives is big or small, if both take more time, even multiplied for the system to reach the equilibrium, that may explain the memory properties and have great biological significance.
References
Lotka, AJ: Elements of Physical Biology. Williams & Wilkins, Baltimore (1925)
Volterra, V: Variazioni e fluttuazioni del numero d’individui in specie animali conviventi. Mem. R. Accad. Naz. Lincei, Ser. VI 2, 31-113 (1926)
May, RM, Leonard, WJ: Nonlinear aspects of competition between three species. SIAM J. Appl. Math. 29, 243-253 (1975)
Hirano, N, Rybicki, S: Existence of periodic solutions for the Lotka-Volterra type systems. J. Differ. Equ. 229, 121-137 (2006)
Zhao, GY, Ruan, SG: Existence, uniqueness and asymptotic stability of time periodic traveling waves for a periodic Lotka-Volterra competition system with diffusion. J. Math. Pures Appl. 95, 627-671 (2011)
De Luca, R: On the asymptotic stability of an Hassell predator-prey model with mutual interference. Acta Appl. Math. 122(1), 191-204 (2012)
Yan, XP, Li, WT: Stability and Hopf bifurcation for a delayed cooperative system with diffusion effects. Int. J. Bifurc. Chaos 18(2), 441-453 (2008)
Shi, CL, Li, Z, Chen, FD: Extinction in a nonautonomous Lotka-Volterra competitive system with infinite delay and feedback controls. Nonlinear Anal., Real World Appl. 13, 2214-2226 (2012)
Gyllenberg, M, Yan, P, Wang, Y: A 3D competitive Lotka-Volterra system with three limit cycles: a falsification of a conjecture by Hofbauer and so. Appl. Math. Lett. 19, 1-7 (2006)
Liao, XY, Zhou, SF, Chen, YM: Permanence for a discrete time Lotka-Volterra type food-chain model with delays. Appl. Math. Comput. 186, 279-285 (2007)
Podlubny, I: Fractional Differential Equation. Academic Press, New York (1999)
Ahmed, E, Elgazzar, AS: On fractional order differential equations model for nonlocal epidemics. Physica A 379, 607-614 (2007)
El-Sayed, AMA, El-Mesiry, AEM, El-Saka, HAA: On the fractional-order logistic equation. Appl. Math. Lett. 20, 817-823 (2007)
Ahmed, E, El-Sayed, AMA, El-Saka, HAA: Equilibrium points, stability and numerical solutions of fractional order predator-prey and rabies models. J. Math. Anal. Appl. 325(1), 542-553 (2007)
Srivastava, M, Agrawal, SK, Das, S: Synchronization of chaotic fractional order Lotka-Volterra system. Int. J. Nonlinear Sci. 13(4), 482-494 (2012)
Das, S, Gupta, PK: A mathematical model on fractional Lotka-Volterra equations. J. Theor. Biol. 277, 1-6 (2011)
Kadem, A, Baleanu, D: Homotopy perturbation method for the coupled fractional Lotka-Volterra equations. Rom. J. Phys. 56, 332-338 (2011)
Batiha, B, Noorani, MSM, Hashim, I: Variational iteration method for solving multispecies Lotka-Volterra equations. Comput. Math. Appl. 54, 903-909 (2007)
Tian, JL, Yu, YG, Wang, H: Stability and bifurcation of two kinds of three-dimensional fractional Lotka-Volterra systems. Math. Probl. Eng. 31(1), 84-94 (2014)
Elsadany, AA, Matouk, AE: Dynamical behaviors of fractional-order Lotka-Volterra predator-prey model and its discretization. J. Appl. Math. Comput. 49(1-2), 269-283 (2015)
He, JH: Homotopy perturbation technique. Comput. Methods Appl. Mech. Eng. 178, 257-262 (1999)
He, JH: A coupling method of a homotopy technique and a perturbation technique for nonlinear problems. Int. J. Non-Linear Mech. 35, 37-43 (2000)
He, JH: Homotopy perturbation method: a new nonlinear analytical technique. Appl. Math. Comput. 135, 73-79 (2003)
Das, S, Gupta, PK, Ghosh, P: An approximate solution of nonlinear fractional reaction-diffusion equation. Appl. Math. Model. 35, 4071-4076 (2011)
Caputo, M: Linear models of dissipation whose Q is almost frequency independent, part II. Geophys. J. R. Astron. Soc. 13, 529-539 (1967)
Agarwal, RP: A propos d’une note de M. Pierre Humbert. C. R. Acad. Sci. Paris 236, 2031-2032 (1953) (in French)
Matignon, D: Stability results for fractional differential equations with applications to control processing. Computational Eng. in Sys. Appl. 2, 963-968 (1997)
Acknowledgements
This research was supported by the National Natural Science Foundation of China (Nos. 11426069, 11271141), and the Starting Foundation for Doctors of Guangdong University of Technology (No. 15ZK0009).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
CG conceived of the study, performed the numerical experiments, and wrote this paper. SF revised and edited the paper. Both authors contributed equally in preparing this paper and approved this version.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Guo, C., Fang, S. Stability and approximate analytic solutions of the fractional Lotka-Volterra equations for three competitors. Adv Differ Equ 2016, 219 (2016). https://doi.org/10.1186/s13662-016-0943-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-016-0943-y