
Abstract
A modified Leslie-Gower predator-prey system with Beddington-DeAngelis functional response and feedback controls is studied. By applying the differential inequality theory, sufficient conditions which guarantee the permanence of the system are obtained. Our results improve the main results of Zhang et al. (Abstr. Appl. Anal. 2014:252579, 2014). One example is presented to verify our main results.
Similar content being viewed by others


1 Introduction
Let \(f(t)\) be a continuous bounded function on ℝ, and we set
Leslie [1, 2] introduced the following two species Leslie-Gower predator-prey model:
where \(x(t)\), \(y(t)\) stand for the population (the density) of the prey and the predator at time t, respectively. The parameters \(r_{1}\) and \(r_{2}\) are the intrinsic growth rates of the prey and the predator, respectively. \(b_{1}\) measures the strength of competition among individuals of species x. The value \(\frac{r_{1}}{b_{1}}\) is the carrying capacity of the prey in the absence of predation. The predator consumes the prey according to the functional response \(p(x)\) and grows logistically with growth rate \(r_{2}\) and carrying capacity \(\frac{r_{2}x}{a_{2}}\) proportional to the population size of the prey (or prey abundance). The parameter \(a_{2}\) is a measure of the food quantity that the prey provides and converted to predator birth. The term \(y/x\) is the Leslie-Gower term which measures the loss in the predator population due to rarity (per capita \(y/x\)) of its favorite food. Leslie model is a predator-prey model where the carrying capacity of the predator is proportional to the number of prey, stressing the fact that there are upper limits to the rates of increase in both prey x and predator y, which are not recognized in the Lotka-Volterra model.
The main shortcoming of (1.1) is that in the case of severe scarcity, y can switch over to other populations but its growth will be limited by the fact that its most favorite food x is not available in abundance. In order to overcome this shortcoming, recently, Aziz-Alaoui and Daher Okiye [3] suggested to add a positive constant d to the denominator and proposed the following predator-prey model with modified Leslie-Gower and Holling-type II schemes:
where \(r_{1}\), \(b_{1}\), \(r_{2}\), \(a_{2}\) have the same meaning as in models (1.1). \(a_{1}\) is the maximum value of the per capita reduction rate of x due to y, \(k_{1}\) (respectively, \(k_{2}\)) measures the extent to which the environment provides protection to prey x (respectively, to the predator y). They obtained the boundedness and global stability of positive equilibrium of system (1.2). Yu [4] studied the structure, linearized stability and the global asymptotic stability of equilibria of (1.2). Zhu and Wang [5] obtained sufficient conditions for the existence and global attractivity of positive periodic solutions of system (1.2) with periodic coefficients. Yu and Chen [6] further considered the permanence and existence of a unique globally attractive positive almost periodic solution of system (1.2) with almost periodic coefficients and mutual interference. Considering that Beddington-DeAngelis functional response preformed better than Holling-type II functional response, Yu [7] incorporated the Beddington-DeAngelis functional response into system (1.2) and considered the following model which is the generalization of model (1.2):
Sufficient conditions on the global asymptotic stability of a positive equilibrium were obtained by Yu [7]. Pal and Mandal [8] considered the Hopf bifurcation of system (1.3) with strong Allee effect. Zhang [9] studied the permanence and existence of an almost periodic solution of system (1.3) with almost periodic coefficients.
Based on Zhang [9], Zhang et al. [10] incorporated the feedback control into model (1.3) with almost periodic coefficients and considered the following model:
where \(b(t)\), \(c(t)\), \(r(t)\), \(k(t)\), \(\alpha(t)\), \(\beta(t)\), \(\gamma(t)\), \(a_{i}(t)\), \(d_{i}(t)\), \(p_{i}(t)\) and \(e_{i}(t)\) (\(i=1,2\)) are all continuous, almost periodic functions and satisfy
Set
Suppose that system (1.4) holds together with the following initial conditions:
By using the comparison theorem of differential equation, Zhang et al. [10] obtained the following result.
Theorem A
([10])
Assume that
hold, then system (1.4) with initial conditions (1.6) is permanent, i.e., any positive solution \((x(t),y(t),u(t),v(t))^{T}\) of system (1.4) with initial conditions (1.6) satisfies
where \(m_{i}\), \(l_{i}\), \(M_{i}\) and \(L_{i}\) (\(i=1,2\)) are positive constants.
Theorem A shows that feedback control variables play important roles in the persistent property of system (1.4). But the question is whether or not the feedback control variables have influence on the permanence of the system. Many papers (see [11–13] and the references cited therein) have showed that feedback control variables have no influence on the permanent property of continuous system with feedback control. Thus, in this paper, we will apply the analysis technique of Chen et al. [11] to establish sufficient conditions, which is independent of feedback control variables, to ensure the permanence of the system. In fact, we obtain the following main result.
Theorem B
Assume that
holds, then system (1.4) with initial conditions (1.6) is permanent.
Comparing with Theorem A, it is easy to see that (H2) in Theorem B is weaker than (H1) in Theorem A, and feedback control variables have no influence on the permanent property of system (1.4), so our results improve the main results in Zhang et al. [10].
The organization of this paper is as follows. In Section 2, we introduce several lemmas, and the permanence of system (1.4) is then studied in this section. In Section 3, a suitable example together with its numerical simulations is given to illustrate the feasibility of the main results.
2 Permanence
Now let us state several lemmas which will be useful in proving the main results of this section.
Lemma 2.1
([14])
If \(a>0\), \(b>0\) and \(\dot{x}\geq x(b-ax)\), when \(t\geq 0 \) and \(x(0)>0\), we have
If \(a>0\), \(b>0\) and \(\dot{x}\leq x(b-ax)\), when \(t\geq 0 \) and \(x(0)>0\), we have
Lemma 2.2
([11])
Assume that \(a > 0\), \(b(t) > 0\) is a bounded continuous function and \(x(0) > 0\). Further suppose that:
-
(i)
$$\dot{x}(t)\leq -ax(t)+b(t), $$
then for all \(t\geq s\),
$$x(t)\leq x(t-s)\exp\{-as\}+ \int_{t-s}^{t}b(\tau) \exp\bigl\{ a(\tau-t)\bigr\} \, d\tau. $$Especially, if \(b(t)\) is bounded above with respect to M, then
$$\limsup_{t\rightarrow +\infty}x(t)\leq \frac{M}{a}. $$ -
(ii)
$$\dot{x}(t)\geq -ax(t)+b(t), $$
then for all \(t\geq s\),
$$x(t)\geq x(t-s)\exp\{-as\}+ \int_{t-s}^{t}b(\tau) \exp\bigl\{ a(\tau-t)\bigr\} \, d\tau. $$Especially, if \(b(t)\) is bounded above with respect to m, then
$$\liminf_{t\rightarrow +\infty}x(t)\geq \frac{m}{a}. $$
The following lemma is a direct conclusion of [10].
Lemma 2.3
For any positive solution \((x(t),y(t),u(t),v(t))^{T}\) of system (1.4) with initial conditions (1.6), there exist four positive constants \(M_{i}\) and \(L_{i}\) (\(i=1,2\)) such that
where \(M_{i}\) and \(L_{i}\) (\(i=1,2\)) are defined in (1.5).
Lemma 2.4
Suppose that (H2) holds, then there exist two positive constants \(m_{1}\) and \(l_{1}\) such that any positive solution \((x(t),y(t),u(t),v(t))^{T}\) of system (1.4) with initial conditions (1.6) satisfies
where \(m_{1}\) and \(l_{1}\) are defined in the proof.
Proof
According to Lemma 2.3, there exists enough large \(T_{1}>0\) such that for \(t\ge T_{1}\),
Thus, it follows from (2.2) and the first equation of system (1.4) that
where \(Q=a_{1}^{l}-2b^{u}M_{1}- \frac{c^{u}}{\gamma^{l}}-2e_{1}^{u}L_{1}< a_{1}^{l}-2b^{u}M_{1}<a_{1}^{u}-2b^{l} \frac{a_{1}^{u}}{b^{l}}=-a_{1}^{u}<0\).
Integrating both sides of (2.3) from η (\(\eta\leq t\)) to t leads to
or
Particularly, take \(\eta=t-\tau\), one can get
Substituting (2.5) into the third equation of system (1.4) leads to
Applying Lemma 2.2(i) to the above differential inequality, for \(0\leq s\leq t\), one has
where we have used the fact that \(\max_{\eta\in[t-s,t]}\exp\{d_{1}^{l}(\eta-t)\}=\exp\{0\}=1\).
Note that there exists K such that \(2e_{1}^{u}L_{1}\exp\{-d_{1}^{l}K\}< \frac{\beta}{2}\), as \(s\ge K\), where \(\beta=a_{1}^{l}- \frac{c^{u}}{\gamma^{l}}>0\) according to (H2). In fact, we can choose \(K> \frac{1}{d_{1}^{l}}\ln \frac{4e_{1}^{u}L_{1}}{\beta}\). And so, fix K, combined with (2.7), we can obtain
for all \(t>T_{1}+K\), where \(D=p_{1}^{u} \frac{1}{Q} (1-\exp\{-QK\} )\exp\{-Q\tau\}>0\).
Substituting (2.8) into the first equation of system (1.4), for all \(t>T_{1}+K\), one has
By Lemma 2.1, we have
Thus, there exists \(T_{2}>T_{1}+K\) such that for all \(t>T_{2}\),
Inequality (2.11) together with the third equation of (1.4) leads to
By applying Lemma 2.2(ii) to the above differential inequality, we have
Obviously, \(m_{1}\) and \(l_{1}\) are independent of the solution of system (1.4). Inequalities (2.10) and (2.12) show that the conclusion of Lemma 2.4 holds. The proof is completed. □
Lemma 2.5
For any positive solution \((x(t),y(t),u(t),v(t))^{T}\) of system (1.4) with initial conditions (1.6), there exist two positive constants \(m_{2}\) and \(l_{2}\) satisfying
where \(m_{2}\) and \(l_{2}\) are defined in the proof.
Proof
The proof of Lemma 2.5 is similar to the proof of Lemma 2.4. However, for the sake of completeness, we give the complete proof here.
According to Lemma 2.3, there exists enough large \(T_{3}>0\) such that for \(t\ge T_{3}\),
Thus, it follows from (2.13) and the second equation of system (1.4) that
where \(P=a_{2}^{l}- \frac{2r^{u}M_{2}}{k^{l}}-2e_{2}^{u}L_{2}<0\).
Integrating both sides of (2.14) from η (\(\eta\leq t\)) to t, leads to
or
Particularly, take \(\eta=t-\tau\), one can get
Substituting (2.16) into the fourth equation of system (1.4) leads to
Applying Lemma 2.2(i) to the above differential inequality, for \(0\leq s\leq t\), one has
where we have used the fact that \(\max_{\eta\in[t-s,t]}\exp\{d_{2}^{l}(\eta-t)\}=\exp\{0\}=1\).
Note that there exists \(K_{1}\) such that \(2e_{2}^{u}L_{2}\exp\{-d_{2}^{l}K_{1}\}< \frac{a_{2}^{l}}{2}\) as \(s\ge K_{1}\). In fact, we can choose \(K_{1}> \frac{1}{d_{2}^{l}}\ln \frac{4e_{2}^{u}L_{2}}{a_{2}^{l}}\). And so, fix \(K_{1}\), combined with (2.18), we can obtain
for all \(t>T_{1}+K_{1}\), where \(B=p_{2}^{u} \frac{1}{P} (1-\exp\{-PK_{1}\} )\exp\{-P\tau\}\).
Substituting (2.19) into the second equation of system (1.4), for all \(t>T_{3}+K_{1}\), one has
By Lemma 2.1, we have
Thus, there exists \(T_{4}>T_{3}+K_{1}\) such that for all \(t>T_{4}\),
Inequality (2.22) together with the fourth equation of (1.4) leads to
By applying Lemma 2.2(ii) to the above differential inequality, we have
Obviously, \(m_{2}\) and \(l_{2}\) are independent of the solution of system (1.4). Inequalities (2.21) and (2.23) show that the conclusion of Lemma 2.5 holds. The proof is completed. □
3 Examples and numeric simulations
Consider the following example:
in this case, we have
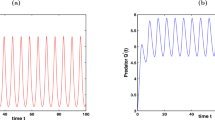
Equation (3.2) shows that (H2) holds, so system (3.1) is permanent according to Theorem B. Our numerical simulation supports our result (see Figure 1). However,
that is to say, (H1) does not hold and we cannot obtain the result of the permanence from Theorem A. Thus our results improve the main results in Zhang et al. [10].

Dynamic behavior of system ( 3.1 ) with the initial conditions \(\pmb{(x(0), y(0),u(0),v(0))=(1.2,4,1.5,3)^{T}}\) , \(\pmb{(0.2,3,3.5,1.3)^{T}}\) , and \(\pmb{(2.5,3,5,6)^{T}}\) , respectively.
References
Leslie, PH: Some further notes on the use of matrices in population mathematics. Biometrika 35, 213-245 (1948)
Leslie, PH: A stochastic model for studying the properties of certain biological systems by numerical methods. Biometrika 45, 16-31 (1958)
Aziz-Alaoui, MA, Daher Okiye, M: Boundedness and global stability for a predator-prey model with modified Leslie-Gower and Holling-type II schemes. Appl. Math. Lett. 16, 1069-1075 (2003)
Yu, S: Global asymptotic stability of a predator-prey model with modified Leslie-Gower and Holling-type II schemes. Discrete Dyn. Nat. Soc. 2012, Article ID 208167 (2012)
Zhu, Y, Wang, K: Existence and global attractivity of positive periodic solutions for a predator-prey model with modified Leslie-Gower Holling-type II schemes. J. Math. Anal. Appl. 384, 400-408 (2011)
Yu, S, Chen, F: Almost periodic solution of a modified Leslie-Gower predator-prey model with Holling-type II schemes and mutual interference. Int. J. Biomath. 7, 1450028 (2014)
Yu, S: Global stability of a modified Leslie-Gower model with Beddington-DeAngelis functional response. Adv. Differ. Equ. 2014, 84 (2014)
Pal, P, Mandal, P: Bifurcation analysis of a modified Leslie-Gower predator-prey model with Beddington-DeAngelis functional response and strong Allee effect. Math. Comput. Simul. 97, 123-146 (2014)
Zhang, Z: Almost periodic solution of a modified Leslie-Gower predator-prey model with Beddington-DeAngelis functional response. J. Appl. Math. 2013, Article ID 834047 (2013)
Zhang, K, Li, J, Yu, A: Almost periodic solution of a modified Leslie-Gower predator-prey model with Beddington-DeAngelis functional response and feedback controls. Abstr. Appl. Anal. 2014, Article ID 252579 (2014)
Chen, F, Yang, J, Chen, L: Note on the persistent property of a feedback control system with delays. Nonlinear Anal., Real World Appl. 11, 1061-1066 (2010)
Chen, F, Yang, J, Chen, L, Xie, X: On a mutualism model with feedback controls. Appl. Math. Comput. 214, 581-587 (2009)
Wu, H, Yu, S: Permanence, extinction, and almost periodic solution of a Nicholson’s blowflies model with feedback control and time delay. Discrete Dyn. Nat. Soc. 2013, Article ID 798961 (2013)
Chen, F, Li, Z, Huang, Y: Note on the permanence of a competitive system with infinite delay and feedback controls. Nonlinear Anal., Real World Appl. 8, 680-687 (2007)
Acknowledgements
The author would like to thank the two anonymous referees for their constructive suggestions on improving the presentation of the paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The author declares that there is no conflict of interests regarding the publication of this paper.
Author’s contributions
The author wrote the manuscript carefully, read and approved the final manuscript.
Rights and permissions
Open Access This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly credited.
About this article

Cite this article
Yue, Q. Permanence for a modified Leslie-Gower predator-prey model with Beddington-DeAngelis functional response and feedback controls. Adv Differ Equ 2015, 81 (2015). https://doi.org/10.1186/s13662-015-0426-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-015-0426-6