
Abstract
This paper is concerned with a class of Nicholson’s blowflies model involving nonlinear density-dependent mortality terms and multiple pairs of time-varying delays. By using differential inequality techniques and the fluctuation lemma, we establish a delay-independent criterion on the global asymptotic stability of the addressed model, which improves and complements some existing ones. The effectiveness of the obtained result is illustrated by some numerical simulations.
Similar content being viewed by others
1 Introduction
Just as pointed out by Berezansky and Braverman [1], in the study of mathematical biology, many models of population dynamics can be characterized by the following delayed differential equation:
where m and l are positive integers, \(F_{j}\) and G are nonnegative continuous functions. Here the functions \(F_{j}\) describe productions incorporating delay, and G corresponds to the instantaneous mortality. Clearly, (1.1) includes the modified Nicholson’s blowflies model with a nonlinear density-dependent mortality term
which in the case \(h_{j}\equiv g_{j}\) coincides with the classical models [2–6]; \(\frac{a(t)x(t)}{b(t)+x(t)}\) is the death rate of the population which depends on time t and the current population level \(x (t)\), \(\beta _{j}(t) x (t-h_{j} (t) )e^{-\gamma _{j}(t) x(t-g_{j}(t))}\) is the time-dependent birth function which involves maturation delay \(h_{ j}(t)\) and incubation delay \(g_{ j}(t)\), and reproduces at its maximum rate \(\frac{1}{\gamma _{ j}(t)}\); \(a(t)\), \(b(t)\), \(\beta _{j}(t)\), \(g _{j}(t)\), \(h _{j}(t)\), and \(\gamma _{j}(t) \) are all nonnegative, continuous and bounded functions; \(a(t)\), \(b(t) \) and \(\gamma _{j}(t) \) are bounded below by positive constants, and \(j\in I:=\{1,2,\ldots , m \}\).
For the past decade or so, for the special case of (1.1) with \(h_{j}\equiv g_{j} (j\in I)\), the existence of positive solutions, permanence, oscillation, periodicity, and stability of such equations and similar models have been studied extensively [7–14]. In particular, the authors in [1] illustrated that two or more delays involved in the same nonlinear function \(F_{j}\) can lead to chaotic oscillations, and they also gave some examples to show that having two delays instead of one can produce sustainable oscillations. In fact, if two or more delays occur, the time delay feedback function \(F_{j}\) should be considered as a function of several variables. This will add difficulty when studying the dynamics of (1.1) and (1.2). So far, results of global stability analysis for models (1.1) and (1.2) involving two or more delays are very few, we only find that the global stability results of Mackey–Glass equation with two different delays
are established under the additional technical conditions on the delay terms [1].
Most recently, Győri et al. [15] established the permanence in the following two constant-delay differential equation:
On the other hand, El-Morshedy and Ruiz-Herrera [16] used the classical approach of “decomposing + embedding” to derive some criteria to guarantee the global attraction to a positive equilibrium for the autonomous equation
where \(\beta , \sigma , \tau \in (0, +\infty )\), and \(\sigma \leq \tau \). However, as in [1–14], the above two works shed no light on the global stability on the modified Nicholson’s blowflies model (1.2).
For convenience, given a bounded continuous function g defined on \(\mathbb{R}\), let \(g^{+}\) and \(g^{-}\) be defined as
It should be mentioned that some delay-independent criteria ensuring the global asymptotic stability of for the Nicholson’s blowflies model (1.2) with \(h_{j}\equiv g_{j} (j\in I)\) have been established in [17]. More precisely, the author in [17] obtained the main result as follows.
Theorem 1.1
Suppose that
Then 0 is a globally asymptotically stable equilibrium point on \(C([-\tau , 0], (0, +\infty )) \), where \(\tau :=\max \{\max_{1\leq j \leq m} g_{j}^{+}, \max_{1\leq j \leq m} h _{j}^{+} \} >0 \).
Unfortunately, there are some mistakes in the proof of main results in [17]. In fact, in lines 3–4 of page 856 in [17], letting \(t\rightarrow \eta (\varphi )\) cannot lead to \(\varlimsup_{t\rightarrow +\infty } \sum_{j=1} ^{m} \frac{\beta _{j }(t)}{\gamma _{j}(t)a(t)} \frac{1}{e} \geq 1 \) since \(\eta (\varphi )=+\infty \) has not been proved. We find that the conclusion of Theorem 1.1 is correct, and the above mistake can be corrected. This has been done in the first half of the proof of Lemma 2.1; please see Sect. 2.
Inspired by the above discussions, in this paper, we consider the nonlinear density-dependent mortality Nicholson’s blowflies model with multiple pairs of time-varying delays described in (1.2). Here, we develop an approach based on differential inequality techniques coupled with an application of the Fluctuation Lemma to establish a delay-independent criterion to ensure the global asymptotic stability of (1.2) in the important, yet difficult case where the two delays are asymptotically apart, i.e., \(h_{j}\not \equiv g_{j}\) (\(j\in I\)). The obtained results have not been investigated till now. Moreover, the proposed results extend and improve all known ones in [17], and the error mentioned above has been corrected. In particular, our analysis can also be applied to the nonautonomous Mackey–Glass equation, and our work partially solves an open problem posed for the Mackey–Glass equation in [1].
2 Preliminary results
We first recall some notions. Let \(C= C([-\tau , 0], \mathbb{R})\) be the Banach space of all continuous functions from \([-\tau , 0]\) to \(\mathbb{R}\) equipped with the supremum norm \(\|\cdot \|\) and \(C_{+}= C([-\tau , 0], [0, +\infty ))\). Let \(t_{0}\in \mathbb{R}\). Then for a continuous function \(x:[t_{0}-\tau ,t_{0}+\sigma )\to \mathbb{R}\) with \(\sigma >0\) and \(t\in [t_{0},t_{0}+\sigma )\), \(x_{t}\in C\) is defined by \(x_{t}(\theta )=x(t+\theta )\) for \(\theta \in [-\tau , 0]\). Denote by \(x_{t}( t_{0}, \varphi )\) (\(x(t; t _{0}, \varphi )\)) a solution of (1.2) with the initial condition
In addition, let \([t_{0},\eta (\varphi ))\) be the maximal right-interval of the existence of \(x_{t}(t_{0}, \varphi )\).
Lemma 2.1
Assume that
as well as
where \(t\in [t_{0},+\infty )\), \(j\in I\), hold. Then, the solution \(x (t)=x(t; t_{0}, \varphi )\geq 0\)for all \(t\in [t_{0}, \eta (\varphi ))\), the set of \(\{x_{t}(t_{0},\varphi ): t\in [t_{0}, \eta (\varphi ))\}\)is bounded, and \(\eta (\varphi )=+\infty \).
Proof
From Theorem 5.2.1 in [18], we obtain \(x (t)=x(t; t _{0}, \varphi )\geq 0\) for all \(t \in [t_{0}, \eta (\varphi ))\). Now, we show that \(\eta (\varphi )=+\infty \). For all \(t\in [t_{0}, \eta (\varphi ))\), defining \(y(t)=\max_{t_{0}-\tau \leq s \leq t} x (s)\), we gain
and
which suggests that
Hence, by the Gronwall–Bellman inequality, we obtain
This follows from Theorem 2.3.1 in [19] that \(\eta ( \varphi )=+\infty \), and then
Furthermore, for each \(t\in [t_{0}-\tau , +\infty ) \), we define
Next, we show that \(x (t)\) is bounded on \([t_{0}, \eta (\varphi ))\). Assume on the contrary that
Let \(T^{*}\ge t_{0}\) be such that \(M(t)\ge t_{0}+\tau \) for \(t\ge T^{*}\). Note that for \(t\ge t_{0}\), it follows from (1.2) that
for all \(s\in [t_{0}, t]\) and \(t\in [t_{0}, + \infty )\).
This, combined with (1.2), (2.3), (2.4), and the fact that \(\sup_{w\ge 0} we^{-w}=\frac{1}{e}\), gives us
and
where \(M(t)>2\tau +t_{0}\).
Letting \(t\rightarrow +\infty \), due to the facts
inequality (2.7) yields
which contradicts assumption (2.2). This implies that \(x (t)\) is bounded on \([t_{0}, +\infty )\), and ends the proof of Lemma 2.1. □
3 Main result
Theorem 3.1
Assume that (2.3) and
are satisfied. Then 0 is a globally asymptotically stable equilibrium point on \(C_{+} \).
Proof
Let \(x (t)=x(t; t_{0}, \varphi )\). From Lemma 2.1, one can see that the set \(\{x_{t}(t_{0}, \varphi ): t\in [t_{0}, +\infty )\}\) is bounded, and \(0\leq u = \limsup_{t\rightarrow +\infty } x (t ) <+\infty \).
We now prove that 0 is a stable equilibrium point. Without loss of generality, let \(0<\epsilon <1\) satisfy
Choosing \(0<\delta <\epsilon \), we claim that, for \(\|\varphi \|< \delta \),
We can pick \(t_{*}\in (t_{0}, +\infty )\) such that
Noting that
(1.2), (3.2) and (3.4) result in
which is a contradiction, so that (3.3) holds. Thus, 0 is a stable equilibrium point.
Hereafter, it is sufficient to show that \(u =\limsup_{t\rightarrow +\infty } x (t ) =0\). By the Fluctuation Lemma [20, Lemma A.1], there exists a sequence \(\{t_{k} \} _{k\geq 1}\) such that
Moreover, from (3.1) and the boundedness of the coefficients and delay functions in (1.2), without loss of generality, we can assume that
and
Furthermore, from (1.2), (2.3), (2.4), we get
and
where \(t_{k}>2\tau +t_{0}\).
If \(u\geq 1\), from (2.3), (3.1), (3.6) and the facts that \(\frac{u}{b ^{*}+u}\geq \frac{1}{b ^{*}+1}\) and \(\sup_{u\geq 0} ue^{- u}=\frac{1}{ e}\), letting \(k\rightarrow +\infty \) leads to
which a contradiction, so that \(0\leq u<1\).
If \(0< u< 1\), from (2.3), (3.1), (3.5), (3.6), and the fact that \(xe^{-x}\) is monotone increasing on \([0,1]\), we have
where \(t_{k}>2\tau +t_{0}\), and
which is also a contradiction, proving that \(u=0\). This completes the proof of Theorem 3.1. □
By applying Theorem 3.1, we can obtain the following result.
Corollary 3.1
Suppose that (3.1) holds, and \(g_{j}(t)\equiv h_{j}(t)\), for all \(t\in [t_{0}, +\infty )\), \(j\in I\). Then 0 is a globally asymptotically stable equilibrium point on \(C_{+} \).
Remark 3.1
It is obvious that all results in Theorem 1.1 are special cases of Corollary 3.1 since the assumptions adopted are weaker than those ones in Theorem 1.1.
4 A numerical example
This section presents an example with graphical illustration to show the applicability of the analytical results derived in this article.
Example 4.1
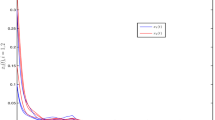
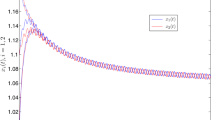
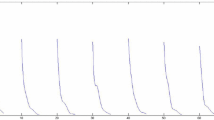
Consider the following nonautonomous Nicholson’s blowflies equation with two pairs of different time-varying delays:
Obviously, it is easy to check that assumptions (2.3) and (3.1) are satisfied in (4.1). Hence, from Theorem 3.1, we have that the zero equilibrium point for the model (3.1) is globally asymptotically stable on \(C_{+} = C([-(2e^{ \frac{\pi }{2}}+150), 0], [0, +\infty ) )\). Figure 1 supports this result with the numerical solutions involving different initial values.

Trajectories of system (4.1) involving differential initial values
Remark 4.1
It should be mentioned that the global asymptotic stability on the Nicholson’s blowflies model involving nonlinear density-dependent mortality terms and multiple pairs of time-varying delays has not been touched in the previous literature. As for [1–17, 21–51], the authors still give no clues on the global asymptotic stability of the Nicholson’s blowflies model involving multiple pairs of time-varying delays. One can see that all the results in the above mentioned references cannot be applied to prove that all the solutions of model (4.1) converge to the zero equilibrium.
5 Conclusions
In this article, the global asymptotic stability of the zero equilibrium for a Nicholson’s blowflies model involving nonlinear density-dependent mortality terms and multiple pairs of time-varying delays is established. To the best of our knowledge, this is the first paper to study the global dynamics for the nonlinear density-dependent mortality Nicholson’s blowflies model involving multiple pairs of time-varying delays and the obtained results are new. Some sufficient conditions set up here are easily verified and these conditions are independent of the multiple pairs of time-varying delays in the addressed model, which improves and complements some existing results mentioned in the Introduction. Moreover, the method used in this paper provides a possible approach for studying the global asymptotic stability of other population dynamic models involving multiple pairs of time-varying delays.
References
Berezansky, L., Braverman, E.: A note on stability of Mackey–Glass equations with two delays. J. Math. Anal. Appl. 450, 1208–1228 (2017)
Berezansky, L., Braverman, E., Idels, L.: Nicholson’s blowflies differential equations revisited: main results and open problems. Appl. Math. Model. 34, 1405–1417 (2010)
Yao, L.: Global attractivity of a delayed Nicholson-type system involving nonlinear density-dependent mortality terms. Math. Methods Appl. Sci. 41, 2379–2391 (2018)
Wang, W.: Positive periodic solutions of delayed Nicholson’s blowflies models with a nonlinear density-dependent mortality term. Appl. Math. Model. 36, 4708–4713 (2012)
Liu, B., Gong, S.: Permanence for Nicholson-type delay systems with nonlinear density-dependent mortality terms. Nonlinear Anal., Real World Appl. 12, 1931–1937 (2011)
Liu, S., Chen, Y., Huang, Y., Zhou, J.: An efficient two grid method for miscible displacement problem approximated by mixed finite element methods. Comput. Math. Appl. 77(3), 752–764 (2019)
Huang, C., Zhang, H., Cao, J., Hu, H.: Stability and Hopf bifurcation of a delayed prey–predator model with disease in the predator. Int. J. Bifurc. Chaos 29(7), 1950091 (2019)
Huang, C., Zhang, H., Huang, L.: Almost periodicity analysis for a delayed Nicholson’s blowflies model with nonlinear density-dependent mortality term. Commun. Pure Appl. Anal. 18(6), 3337–3349 (2019)
Liu, P., Zhang, L., Liu, S., et al.: Global exponential stability of almost periodic solutions for Nicholson’s blowflies system with nonlinear density-dependent mortality terms and patch structure. Math. Model. Anal. 22(4), 484–502 (2017)
Wang, F., Huang, C., Huang, L.: Discontinuity-induced limit cycles in a general planar piecewise linear system of saddle-focus type. Nonlinear Anal. Hybrid Syst. 33, 162–178 (2019)
Berezansky, L., Braverman, E.: Mackey–Glass equation with variable coefficients. Comput. Math. Appl. 51, 1–16 (2006)
Berezansky, L., Braverman, E., Idels, L.: The Mackey–Glass model of respiratory dynamics: review and new results. Nonlinear Anal. 75, 6034–6052 (2012)
Berezansky, L., Braverman, E., Idels, L.: Mackey–Glass model of hematopoiesis with monotone feedback revisited. Appl. Math. Comput. 219, 4892–4907 (2013)
Berezansky, L., Braverman, E., Idels, L.: Mackey–Glass model of hematopoiesis with non-monotone feedback: stability, oscillation and control. Appl. Math. Comput. 219, 6268–6283 (2013)
Győri, I., Hartung, F., Mohamady, N.A.: Permanence in a class of delay differential equations with mixed monotonicity. Electron. J. Qual. Theory Differ. Equ. 2018, 53 (2018)
El-Morshedy, H.A., Ruiz-Herrera, A.: Global convergence to equilibria in non-monotone delay differential equations. Proc. Am. Math. Soc. 147, 2095–2105 (2019)
Tang, Y.: Global asymptotic stability for Nicholson’s blowflies model with a nonlinear density-dependent mortality term. Appl. Math. Comput. 250, 854–859 (2015)
Smith, H.L.: Monotone Dynamical Systems. Math. Surveys Monogr. Am. Math. Soc., Providence (1995)
Hale, J., Verduyn Lunel, S.: Introduction to functional differential equations. In: Applied Mathematical Sciences, vol. 99. Springer, New York (1993)
Smith, H.L.: An Introduction to Delay Differential Equations with Applications to the Life Sciences. Springer, New York (2011)
Wang, J., Chen, X., Huang, L.: The number and stability of limit cycles for planar piecewise linear systems of node-saddle type. J. Math. Anal. Appl. 469(1), 405–427 (2019)
Hu, H., Yuan, X., Huang, L., Huang, C.: Global dynamics of an SIRS model with demographics and transfer from infectious to susceptible on heterogeneous networks. Math. Biosci. Eng. 16(5), 5729–5749 (2019)
Rajchakit, G., Pratap, A., Raja, R., Cao, J., Alzabut, J., Huang, C.: Hybrid control scheme for projective lag synchronization of Riemann–Liouville sense fractional order memristive BAM neural networks with mixed delays. Mathematics 7(8), 759 (2019). https://doi.org/10.3390/math7080759
Song, C., Fei, S., Cao, J., Huang, C.: Robust synchronization of fractional-order uncertain chaotic systems based on output feedback sliding mode control. Mathematics 7(7), 599 (2019). https://doi.org/10.3390/math7070599
Yang, X., Wen, S., Liu, Z., Li, C., Huang, C.: Dynamic properties of foreign exchange complex network. Mathematics 7(9), 832 (2019). https://doi.org/10.3390/math7090832
Kumari, S., Chugh, R., Cao, J., Huang, C.: Multi fractals of generalized multivalued iterated function systems in b-metric spaces with applications. Mathematics 7(10), 967 (2019). https://doi.org/10.3390/math7100967
Li, W., Huang, L., Ji, J.: Periodic solution and its stability of a delayed Beddington–DeAngelis type predator–prey system with discontinuous control strategy. Math. Methods Appl. Sci. 42(13), 4498–4515 (2019)
Hu, H., Yi, T., Zou, X.: On spatial-temporal dynamics of Fisher–KPP equation with a shifting environment. Proc. Am. Math. Soc. 148(1), 213–221 (2020)
Zhang, J., Lu, C., Li, X., Kim, H.-J., Wang, J.: A full convolutional network based on DenseNet for remote sensing scene classification. Math. Biosci. Eng. 16(5), 1–13 (2019)
Huang, Y., Chen, X., Zhu, H., Huang, C., Tian, Z.: The heterogeneous effects of FDI and foreign trade on CO2 emissions: evidence from China. Math. Probl. Eng. 2019, Article ID 9612492 (2019). https://doi.org/10.1155/2019/9612492
Li, X., Liu, Z., Li, J., Tisdell, C.: Existence and controllability for nonlinear fractional control systems with damping in Hilbert spaces. Acta Math. Sci. 39(1), 229–242 (2019)
Tan, Y., Huang, C., Sun, B., Wang, T.: Dynamics of a class of delayed reaction–diffusion systems with Neumann boundary condition. J. Math. Anal. Appl. 458(2), 1115–1130 (2018)
Huang, C., Qiao, Y., Huang, L., Agarwal, R.P.: Dynamical behaviors of a food-chain model with stage structure and time delays. Adv. Differ. Equ. 2018, 186 (2018). https://doi.org/10.1186/s13662-018-1589-8
Duan, L., Fang, X., Huang, C.: Global exponential convergence in a delayed almost periodic Nicholson’s blowflies model with discontinuous harvesting. Math. Methods Appl. Sci. 41(5), 1954–1965 (2018)
Chen, T., Huang, L., Yu, P., Huang, W.: Bifurcation of limit cycles at infinity in piecewise polynomial systems. Nonlinear Anal., Real World Appl. 41, 82–106 (2018)
Cai, Z., Huang, J., Huang, L.: Periodic orbit analysis for the delayed Filippov system. Proc. Am. Math. Soc. 146(11), 4667–4682 (2018)
Yang, C., Huang, L., Li, F.: Exponential synchronization control of discontinuous nonautonomous networks and autonomous coupled networks. Complexity 2018, Article ID 6164786 (2018)
Liu, J., Yan, L., Xu, F., Lai, M.: Homoclinic solutions for Hamiltonian system with impulsive effects. Adv. Differ. Equ. 2018, 326 (2018)
Hu, H., Zou, X.: Existence of an extinction wave in the Fisher equation with a shifting habitat. Proc. Am. Math. Soc. 145(11), 4763–4771 (2017)
Duan, L., Huang, C.: Existence and global attractivity of almost periodic solutions for a delayed differential neoclassical growth model. Math. Methods Appl. Sci. 40(3), 814–822 (2017)
Zhang, H. : Global exponential stability of periodic solutions in a nonsmooth model of hematopoiesis with time-varying delays. Discrete Contin. Dyn. Syst. 39(11), 6669–6682 (2017)
Huang, C., Cao, J., Wen, F., Yang, X.: Stability analysis of SIR model with distributed delay on complex networks. PLoS ONE 11(8), e0158813 (2016)
Huang, C., Yang, Z., Yi, T., Zou, X.: On the basins of attraction for a class of delay differential equations with non-monotone bistable nonlinearities. J. Differ. Equ. 256(7), 2101–2114 (2014)
Huang, C., Yang, X., Cao, J.: Stability analysis of Nicholson’s blowflies equation with two different delays. Math. Comput. Simul. (2019). https://doi.org/10.1016/j.matcom.2019.09.023
Cao, Q., Wang, G., Qian, C.: New results on global exponential stability for a periodic Nicholson’s blowflies model involving time-varying delays. Adv. Differ. Equ. (2019). https://doi.org/10.1186/s13662-020-2495-4
Long, X., Gong, S.: New results on stability of Nicholson’s blowflies equation with multiple pairs of time-varying delays. Appl. Math. Lett. 100, 106027 (2020). https://doi.org/10.1016/j.aml.2019.106027
Huang, C., Long, X., Huang, L., Fu, S.: Stability of almost periodic Nicholson’s blowflies model involving patch structure and mortality terms. Can. Math. Bull. (2019). https://doi.org/10.4153/S0008439519000511
Li, J., Du, C.: Existence of positive periodic solutions for a generalized Nicholson’s blowflies model. J. Comput. Appl. Math. 221, 226–233 (2008)
Wang, F., Yao, Z.: Approximate controllability of fractional neutral differential systems with bounded delay. Fixed Point Theory 17, 495–507 (2016)
Feng, Q., Yan, J.: Global attractivity and oscillation in a kind of Nicholson’s blowflies. J. Biomath. 17, 21–26 (2002)
Qian, C., Hu, Y.: Novel stability criteria on nonlinear density-dependent mortality Nicholson’s blowflies systems in asymptotically almost periodic environments. J. Inequal. Appl. (2020). https://doi.org/10.1186/s13660-019-2275-4
Acknowledgements
We would like to thank the anonymous referees and the editor for very helpful suggestions and comments which led to improvements of our original paper.
Availability of data and materials
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
Funding
This work is supported by the Foundation of Hunan Provincial Education Department of China(Grant No. 14C0806), the Natural Scientific Research Fund of Hunan Provincial of China (Grant No. 2016JJ6104), and the Natural Scientific Research Fund of Zhejiang Province of China under Grant No. LY18A010019.
Author information
Authors and Affiliations
Contributions
The four authors contributed equally to this work. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Cao, Q., Wang, G., Zhang, H. et al. New results on global asymptotic stability for a nonlinear density-dependent mortality Nicholson’s blowflies model with multiple pairs of time-varying delays. J Inequal Appl 2020, 7 (2020). https://doi.org/10.1186/s13660-019-2277-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13660-019-2277-2