
Abstract
In this paper, we propose a new iteration method based on the hybrid steepest descent method and Ishikawa-type method for seeking a solution of a variational inequality involving a Lipschitz continuous and strongly monotone mapping on the set of common fixed points for a finite family of Lipschitz continuous and quasi-pseudocontractive mappings in a real Hilbert space.
MSC: 41A65, 47H17, 47J20.
Similar content being viewed by others

1 Introduction and preliminaries
Let C be a nonempty closed and convex subset of a real Hilbert space H with the inner product and induced norm . A mapping F of C into H is said to be monotone if
for all .
The variational inequality problem with respect to F and C is to find a point such that
Variational inequalities were initially investigated by Kinderlehrer and Stampacchia in [1], and have been widely studied by many authors ever since, due to the fact that they cover as diverse disciplines as partial differential equations, optimization, optimal control, mathematical programming, mechanics and finance (see [1–3]).
We know that if F is a k-Lipschitz continuous and η-strongly monotone mapping, i.e., F enjoys the following properties:
for all , where k and η are fixed positive numbers, then (1.2) has a unique solution. It is well known that (1.2) is equivalent to the fixed point equation
where stands for the metric projection from H onto C and μ is an arbitrarily positive number. Consequently, the well-known iterative procedure, the projected gradient method (PGM) [3–6], can be used to solve (1.2). PGM generates an iterative sequence by the recursion
When F is a k-Lipschitz continuous and η-strongly monotone mapping, as , the sequence generated by (1.4) converges strongly to a unique solution of (1.2).
The projected gradient method (1.4) involves the metric projection . In order to reduce the complexity caused by , Yamada [7] introduced a hybrid steepest descent method (HSDM) for solving (1.2). By assuming that , where and is a nonexpansive mapping on H, i.e.,
for all , Yamada proposed the following iterative algorithm:
where , taking values in , and is a sequence of real numbers in , and proved that, under the following conditions:
(L1) ,
(L2) ,
(L3) , and
(L4) ,
the sequence generated by (1.5) converges strongly to a unique solution of (1.2). The algorithms and convergence results of Yamada in [7] have been improved and extended to a finite or an infinite family of nonexpansive mappings; see, for example, Xu and Kim [8], Zeng [9], Liu and Cai [10], and Iemoto and Takahashi [11]. However, all such improvements and extensions are confined to a finite or an infinite family of nonexpansive mappings.
In this paper, we propose a new iterative algorithm based on a combination of the projected gradient method for variational inequalities with the Ishikawa-type method for fixed point problems to solve (1.2) with , where is a finite family of -Lipschitz continuous and quasi-pseudocontractive mappings on Ω, where Ω is a nonempty closed and convex subset of H, while is a k-Lipschitz continuous and η-strongly monotone mapping.
Given a stating point , the iteration is generated by
where , satisfy the following conditions:
-
(i)
;
-
(ii)
, ;
-
(iii)
, ,
where , while μ is a fixed constant satisfying .
By virtue of new analysis techniques, we prove that the sequence generated by (1.6) converges strongly to a unique solution of (1.2) with .
In order to reach our goal, we need the following conceptions and facts.
Let D be a nonempty subset of a real Hilbert space H. A mapping is called κ-strictly pseudocontractive if and only if there exists a constant such that
for all . When , T is said to be pseudocontractive.
T is said to be quasi-pseudocontractive if and only if and
for all but .
We remark that inequalities (1.7) and (1.8) are equivalent to the inequalities
and
for all but , respectively.
We note that if T is κ-strictly pseudocontractive, then it is Lipschitz continuous and pseudocontractive; if T is a pseudocontraction with a fixed point, then T is a quasi-pseudocontraction; however, the converse may be not true.
Recall that the metric (nearest point) projection from H onto a nonempty closed convex subset E of H is defined as follows: for each point , there exists a unique point with the property
that is, for any point , if and only if and .
Let be a metric projection from H on a nonempty closed convex subset E of H. Then the following conclusions hold true:
(p1) Given and . Then if and only if there holds the inequality
(p2)
in particular, one has
-
(i)
for all ;
-
(ii)
for all and ;
-
(iii)
for all and () such that , the following equality holds:
Lemma 1.3 [7]
Let Ω be a nonempty subset of H and be a k-Lipschitz continuous and η-strongly monotone mapping. For each and , write and . Then we have
for all .
Lemma 1.4 [16]
Let E be a nonempty closed convex subset of a real Hilbert space H and be L-Lipschitz continuous and quasi-pseudocontractive. Then is a nonempty closed convex subset of E, and therefore is well defined for each .
Lemma 1.5 [17]
Let E be a nonempty closed convex subset of a real Hilbert space H and be a demicontinuous pseudocontraction from E into itself. Then is a closed convex subset of E and is demiclosed at zero.
Lemma 1.6 [18]
Let be a sequence of real numbers such that there exists a subsequence of such that for all . Then there exists a nondecreasing sequence such that and the following properties are fulfilled:
for all sufficiently large numbers .
Lemma 1.7 [19]
Let be a sequence of nonnegative real numbers satisfying the following relation:
where and satisfy the following conditions: , , and . Then as .
2 Main results
Theorem 2.1 Let Ω be a nonempty, closed and convex subset of a real Hilbert space H. Let be -Lipschitz continuous and quasi-pseudocontractive with Lipschitz constants , respectively. Let be a k-Lipschitz continuous and η-strongly monotone mapping. Assume that and are demiclosed at zero for . Let be defined by (1.6). Then converges strongly to a unique solution of (1.2), where .
Proof First of all, we show that is well defined for each . Indeed, in view of Lemma 1.4, we know that are closed convex for , and hence ℱ is also nonempty, closed and convex; consequently, is well defined for any . Secondly, we show that there exists a unique such that
Indeed, in view of Lemma 1.3, we know that is a contraction, and hence is also a contraction on Ω. Then we use the Banach contraction mapping principle to deduce (2.1).
Write . Then, , by virtue of Lemma 1.2, (1.6) and (1.8), we have that
for and all .
Furthermore, from (1.6) and Lemma 1.2, we get that
for and all .
At this point, we can estimate . In fact, from Lemma 1.2, (2.2), (2.3) and conditions (i) and (iii) in (1.6), we have
for all and all .
Note that , it follows from (2.4) that
In particular, for , we have
From Lemmas 1.1, 1.3 and (2.6), we can prove that is bounded. Indeed, we have
for all , and therefore is bounded; consequently, , and are all bounded.
We next show that ().
By virtue of Lemmas 1.1-1.3, (1.6) and (2.4), we have that
for and all , where and are fixed positive constants.
Set . Then (2.7) reduces to
for and all .
Now we consider two possible cases.
Case 1. is decreasing eventually, that is, there exists some integer such that
In this case, we have exists.
Taking the limit in (2.8), noting that as , we get that
for . It follows from (1.6) that
for . Since is -Lipschitz continuous, we have that
for . Consequently, from (2.9)∼(2.11) we get that
as , which derives that
Assume that
Without loss of generality, we can assume that weakly as ; then for , by virtue of (2.9) and our assumption, and hence . It follows from (2.13) and (1.2) that
Set and . Then (2.8) reduces to
where . Now Lemma 1.7 can be used to deduce as .
Case 2. is not decreasing eventually, that is, there exists a subsequence of such that for all . By virtue of Lemma 1.6, we know that there exists a nondecreasing sequence such that , and for all sufficiently large . In this case, we have for large enough . It follows from (2.8) that
and
By using a reasoning similar to case 1, we can obtain that , and hence by (2.17), i.e., as , which derives as ; consequently, as , since for sufficiently large . This completes the proof. □
Remark 2.1 When , in (1.6) can be dropped.
Corollary 2.1 Let Ω be a nonempty, closed and convex subset of a real Hilbert space H. Let be N -Lipschitz continuous and strongly pseudocontractive with Lipschitz constants , respectively. Let F, ℱ and be the same as in Theorem 2.1. Then converges strongly to a unique solution of (1.2), where .
Proof By virtue of Lemma 1.5, we know that are closed convex for and hence is nonempty, closed and convex. Lemma 1.5 also ensures that are demiclosed at zero for and hence the conclusion of Corollary 2.1 follows exactly from Theorem 2.1. □
Corollary 2.2 Let Ω be a nonempty, closed and convex subset of a real Hilbert space H. Let be N strict pseudocontractions, respectively. Let F, ℱ and be the same as in Theorem 2.1. Then converges strongly to a unique solution of (1.2), where .
Proof Since every strictly pseudocontractive mapping is Lipschitz continuous and pseudocontractive, we have the desired conclusion. □
Corollary 2.3 Let Ω be a nonempty, closed and convex subset of a real Hilbert space H. Let be N nonexpansive mappings, respectively. Let F, ℱ and be the same as in Theorem 2.1. Then converges strongly to a unique solution of (1.2), where .
Proof Since any nonexpansive mapping is 1-Lipschitz continuous and pseudocontractive, we have the desired conclusion by Corollary 2.2. □
Remark 2.2 When , we have the following strong convergence theorem.
Corollary 2.4 Let Ω be a nonempty, closed and convex subset of a real Hilbert space H. Let be N -Lipschitz continuous and quasi-pseudocontractive with Lipschitz constants , respectively. Let ℱ and be the same as in Theorem 2.1. Let be defined by (1.6) with . Then converges strongly to the minimum-norm fixed point of the family .
3 Numerical example
Example 3.1 [20]
Consider the following optimization problem: find an element
where , , a Euclid space, and , defined by
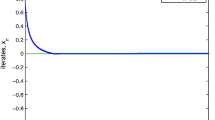
(3.1) has a unique solution and is 1-Lipschitz continuous and -strongly monotone. Starting with the point , and , set , , for , Table 1 shows the results of algorithm in [20], we obtained the results of algorithm (1.6) in Table 2. Obviously, the results in Table 2 are better.
Example 3.2 [21]
Let with absolute value norm. Let and be defined by
and
Then , is 5-Lipschitz continuous and pseudocontractive and is 10-Lipschitz continuous and pseudocontractive. We find the point with the minimum-norm. To do so, set .
Now, taking , , , for , and , we see that the conditions of Corollary 2.1 are fulfilled and algorithm (1.6) provides the data in Table 3. Our result is better.
References
Kinderlehrer D, Stampacchia G: An Introduction to Variational Inequalities and Their Applications. Academic Press, New York; 1980.
Glowinski R: Numerical Methods for Nonlinear Variational Problems. Springer, New York; 1984.
Zeidler E: Nonlinear Functional Analysis Its Applications. Springer, New York; 1985.
Goldstein AA: Convex programming in Hilbert space. Bull. Am. Math. Soc. 1964, 70: 709–710. 10.1090/S0002-9904-1964-11178-2
Kassay G, Reich S, Sabach S: Iterative methods for solving systems of variational inequalities in reflexive Banach spaces. SIAM J. Optim. 2011, 21: 1319–1344. 10.1137/110820002
Censor Y, Gibali A, Reich S, Sabach S: Common solutions to variational inequalities. Set-Valued Var. Anal. 2012, 20: 229–247. 10.1007/s11228-011-0192-x
Yamada Y: The hybrid steepest-descent method for variational inequality problems over the intersection of the fixed point sets of nonexpansive mappings. In Inherently Parallel Algorithms in Feasibility and Optimization and Their Application. Edited by: Butnariu D, Censor Y, Reich S. North-Holland, Amsterdam; 2001:473–504.
Xu HK, Kim TH: Convergence of hybrid steepest-descent methods for variational inequalities. J. Optim. Theory Appl. 2003, 119: 185–201.
Zeng LC, Wong NC, Yao JC: Convergence analysis of modified hybrid steepest-descent methods with variable parameters for variational inequalities. J. Optim. Theory Appl. 2007, 132: 51–69. 10.1007/s10957-006-9068-x
Liu X, Cui Y: The common minimal-norm fixed point of a finite family of nonexpansive mappings. Nonlinear Anal. TMA 2010, 73: 76–83. 10.1016/j.na.2010.02.041
Iemoto S, Takahashi W: Strong convergence theorems by a hybrid steepest descent method for countable nonexpansive mappings in Hilbert spaces. Sci. Math. Jpn. 2008, 21: 557–570.
Albert Y: Metric and generalized projection operators in Banach spaces: properties and applications. Lecture Notes in Pure and Appl. Math. 178. In Theory and Applications of Nonlinear Operators of Accretive and Monotone Type. Edited by: Kartsatos AG. Dekker, Amsterdam; 1996:15–50.
Goebel K, Reich S: Uniform Convexity, Hyperbolic Geometry, and Nonexpansive Mappings. Dekker, New York; 1984.
Marino G, Xu HK: Weak and strong convergence theorems for strict pseudo-contractions in Hilbert spaces. J. Math. Anal. Appl. 2007, 329: 336–346. 10.1016/j.jmaa.2006.06.055
Zegeye H, Shahzad N: Convergence of Mann’s type iteration method for generalized asymptotically nonexpansive mappings. Comput. Math. Appl. 2011, 62: 4007–4014. 10.1016/j.camwa.2011.09.018
Zhou HY, Su YF: Strong convergence theorems for a family of quasi-pseudo-contractions in Hilbert spaces. Nonlinear Anal. 2009, 71: 120–125. 10.1016/j.na.2008.10.059
Zhou HY: Convergence theorems of fixed points for Lipschitz pseudo-contractions in Hilbert spaces. J. Math. Anal. Appl. 2008, 343: 546–556. 10.1016/j.jmaa.2008.01.045
Maingé PE: Strong convergence of projected subgradient methods for nonsmooth and non-strictly convex minimization. Set-Valued Anal. 2008, 16: 899–912. 10.1007/s11228-008-0102-z
Xu HK: Another control condition in an iterative method for nonexpansive mappings. Bull. Aust. Math. Soc. 2002, 65: 109–113. 10.1017/S0004972700020116
Kim JK, Buong N: A new explicit iteration method for variational inequalities on the set of common fixed points for a finite family of nonexpansive mappings. J. Inequal. Appl. 2013., 2013: Article ID 419
Zegeye H, Shahzad N: An algorithm for a common fixed point of a family of pseudocontractive mappings. Fixed Point Theory Appl. 2013., 2013: Article ID 234
Acknowledgements
This research was supported by the National Natural Science Foundation of China (11071053).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All the authors contributed equally.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article

Cite this article
Zhou, H., Wang, P. A new iteration method for variational inequalities on the set of common fixed points for a finite family of quasi-pseudocontractions in Hilbert spaces. J Inequal Appl 2014, 218 (2014). https://doi.org/10.1186/1029-242X-2014-218
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1029-242X-2014-218